Grove - Acelerómetro Digital de 3 Ejes ±16g Ultra-bajo Consumo (BMA400)

El sensor Grove - Acelerómetro Digital de 3 Ejes ±16g Ultra-bajo Consumo (BMA400) es un sensor de aceleración triaxial digital de 12 bits con características inteligentes de interrupción activada por movimiento y posición integradas en el chip. Puede detectar tu postura de movimiento, como Caminar, Correr, Permanecer inmóvil.

Versión
| Versión del Producto | Cambios | Fecha de Lanzamiento |
|---|---|---|
| Grove - Acelerómetro Digital de 3 Ejes ±16g Ultra-bajo Consumo (BMA400) | Inicial | Nov 2018 |
Características
- Ultra bajo consumo
- Funcionalidad programable
- FIFO integrado
- Características de interrupción integradas
Bajo consumo automático/Despertar automático
Actividad/Inactividad
Contador de pasos
Reconocimiento de actividad (Caminar, Correr, Permanecer quieto)
Detección de orientación
Toque/Doble toque
Especificaciones
| Elemento | Valor |
|---|---|
| Voltaje de Operación | 3.3V / 5V |
| Consumo de energía | 18uA @5V / 14uA @3.3V |
| Temperatura de Operación | -40℃ ~ +85℃ |
| Rango de Aceleración | ±2g, ±4g, ±8g, ±16g |
| Sensibilidad | 1024LSB/g / @±2g 512LSB/g / @±4g256LSB/g / @±8g128LSB/g / @±16g |
| Interfaz | I^2^C |
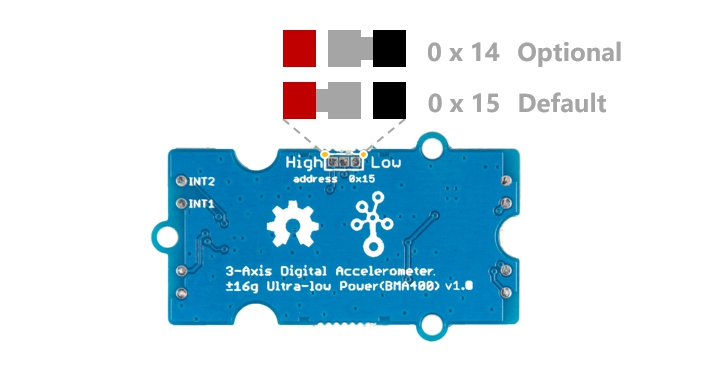
| Dirección I^2^C | 0x15(por defecto) / 0x14(opcional) |
| Tamaño | L: 40mm W: 20mm H: 10mm |
| Peso | 3.2g |
| Tamaño del paquete | L: 140mm W: 90mm H: 10mm |
| Peso bruto | 10g |
Aplicaciones típicas
- Conteo de pasos con consumo de corriente ultra-bajo para una vida útil extensa de la batería
- Aplicaciones de fitness / Seguimiento de actividad
- Detección de toque / doble toque
- Detección de caídas para registro de garantía
- Mediciones de ventanas/puertas para control de clima y sistemas de alarma
Descripción general del hardware
Distribución de pines

Esquemático
Alimentación

El voltaje típico del BMA400 es 1.8V, por lo que usamos el chip XC6206P182MR para proporcionar un 1.8V estable. La entrada del XC6206P33 varía de 1.8V a 6.0V, por lo que puedes usar este módulo con tu Arduino tanto en 3.3V como en 5V.
Circuito de desplazador de nivel bidireccional

Este es un circuito típico de desplazador de nivel bidireccional para conectar dos secciones de voltaje diferentes de un bus I^2^C. El bus I2C de este sensor usa 1.8V, si el bus I2C del Arduino usa 5V o 3.3v, este circuito será necesario. En el esquemático anterior, Q1 y Q2 son MOSFET de canal N CJ2102, que actúan como un interruptor bidireccional. Para entender mejor esta parte, puedes consultar el AN10441
Plataformas compatibles
| Arduino | Raspberry Pi |
|---|---|
|
|
Las plataformas mencionadas anteriormente como compatibles son una indicación de la compatibilidad de software o teórica del módulo. Solo proporcionamos biblioteca de software o ejemplos de código para la plataforma Arduino en la mayoría de los casos. No es posible proporcionar biblioteca de software / código de demostración para todas las plataformas MCU posibles. Por lo tanto, los usuarios tienen que escribir su propia biblioteca de software.
Primeros Pasos
Jugar Con Arduino
Hardware
Materiales requeridos
| Seeeduino V4.2 | Base Shield | Grove BMA400 |
|---|---|---|
|
|
|
| Obtener Uno Ahora | Obtener Uno Ahora | Obtener Uno Ahora |



1 Por favor conecta el cable USB con cuidado, de lo contrario podrías dañar el puerto. Por favor usa el cable USB con 4 cables en el interior, el cable de 2 cables no puede transferir datos. Si no estás seguro sobre el cable que tienes, puedes hacer clic aquí para comprar
2 Cada módulo Grove viene con un cable Grove cuando lo compras. En caso de que pierdas el cable Grove, puedes hacer clic aquí para comprar.
-
Paso 1. Conecta el Grove - Acelerómetro Digital de 3 Ejes ±16g Ultra-bajo Consumo (BMA400) al puerto I^2^C del Grove-Base Shield.
-
Paso 2. Conecta el Grove - Base Shield al Seeeduino.
-
Paso 3. Conecta el Seeeduino a la PC mediante un cable USB.

Si no tenemos Grove Base Shield, también podemos conectar directamente este módulo al Seeeduino como se muestra a continuación.
| Seeeduino | Cable Grove | Grove BMA400 |
|---|---|---|
| GND | Negro | GND |
| 5V o 3.3V | Rojo | VCC |
| SDA | Blanco | SDA |
| SCL | Amarillo | SCL |
Software
Si esta es la primera vez que trabajas with Arduino, te recomendamos encarecidamente que veas Getting Started with Arduino antes de comenzar.
-
Paso 1. Descarga la librería Seeed_BMA400 desde Github.
-
Paso 2. Consulta How to install library para instalar la librería para Arduino.
-
Paso 3. Reinicia el IDE de Arduino. Abre el ejemplo, puedes abrirlo de las siguientes tres maneras:
- Ábrelo directamente en el IDE de Arduino a través de la ruta: File --> Examples --> Grove 3-Axis Digital Accelerometer ±16g Ultra-low Power(BMA400) --> BMA400_Example.

- Ábrelo en tu computadora haciendo clic en BMA400_Example.ino que puedes encontrar en la carpeta XXXX\Arduino\libraries\Grove_3Axis_Digital_Accelerometer_BMA400-master\examples\BMA400_Example, XXXX es la ubicación donde instalaste el IDE de Arduino.

- O, puedes simplemente hacer clic en el icono
en la esquina superior derecha del bloque de código para copiar el siguiente código en un nuevo sketch en el IDE de Arduino.
#include "BMA400.h"
float x = 0, y = 0, z = 0;
int16_t temp = 0;
void setup(void)
{
Wire.begin();
Serial.begin(115200);
while(!Serial);
Serial.println("BMA400 Raw Data");
while(1)
{
if(bma400.isConnection())
{
bma400.initialize();
Serial.println("BMA400 is connected");
break;
}
else Serial.println("BMA400 is not connected");
delay(2000);
}
}
void loop(void)
{
bma400.getAcceleration(&x, &y, &z);
temp = bma400.getTemperature();
Serial.print(x);
Serial.print(",");
Serial.print(y);
Serial.print(",");
Serial.print(z);
Serial.print(",");
Serial.print(temp);
Serial.println();
delay(50);
}
El archivo de biblioteca puede actualizarse. Este código puede no ser aplicable al archivo de biblioteca actualizado, por lo que recomendamos que uses los primeros dos métodos.
-
Paso 4. Sube la demostración. Si no sabes cómo subir el código, por favor revisa Cómo subir código.
-
Paso 5. Abre el Monitor Serie del IDE de Arduino haciendo clic en Herramienta-> Monitor Serie. O presiona las teclas ++ctrl+shift+m++ al mismo tiempo. Establece la velocidad de baudios a 115200.
Si todo va bien, puede mostrarse como se indica a continuación:
BMA400 Raw Data
BMA400 is connected
85.94,357.42,916.02,23
-148.44,222.66,464.84,23
-626.95,320.31,1109.38,23
-500.00,-111.33,144.53,23
-398.44,-232.42,433.59,23
-783.20,-255.86,638.67,23
-1453.13,-552.73,822.27,23
El formato de datos en bruto:
Eje X/unidad mg; Eje Y/unidad mg; Eje Z/unidad mg; temperatura/unidad ℃
Visor Esquemático en Línea
Recursos
-
[Zip] Grove - Acelerómetro Digital de 3 Ejes ±16g Ultra-bajo Consumo (BMA400) Archivos Eagle
-
[Zip] Librería Seeed BMA400
-
[PDF] Hoja de Datos BMA400
-
[PDF] HOJA DE DATOS XC6206
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarle diferentes tipos de soporte para asegurar que su experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para satisfacer diferentes preferencias y necesidades.