Grove Beginner Kit Para Arduino
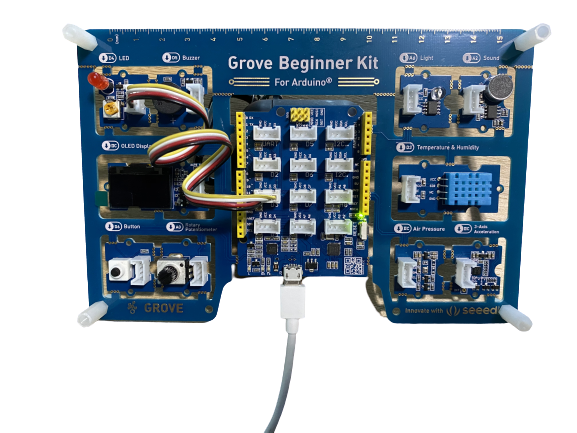
Grove Beginner Kit para Arduino es uno de los mejores kits para principiantes de Arduino. Incluye una placa compatible con Arduino y 10 sensores adicionales de Arduino, todo en un diseño de PCB de una sola pieza. Todos los módulos han sido conectados al Seeeduino a través de los orificios de estampado de PCB, por lo que no se necesitan cables Grove para conectar. Por supuesto, también puedes sacar los módulos y usar cables Grove para conectar los módulos. Puedes construir cualquier proyecto de Arduino que desees con este Grove Beginner Kit Para Arduino.
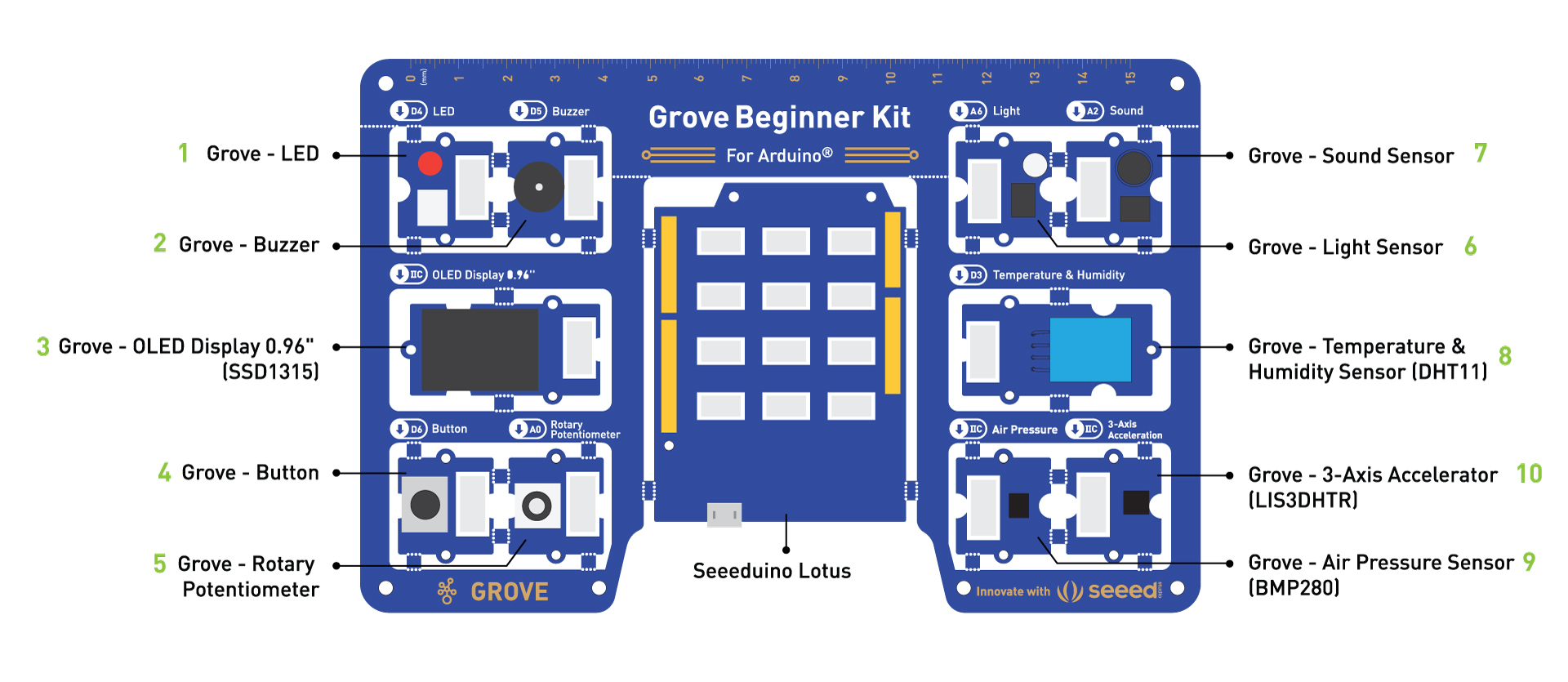
Descripción General del Hardware
Versión anterior (Antes de octubre de 2025) ↓
Nueva Versión (Después de octubre de 2025) ↓
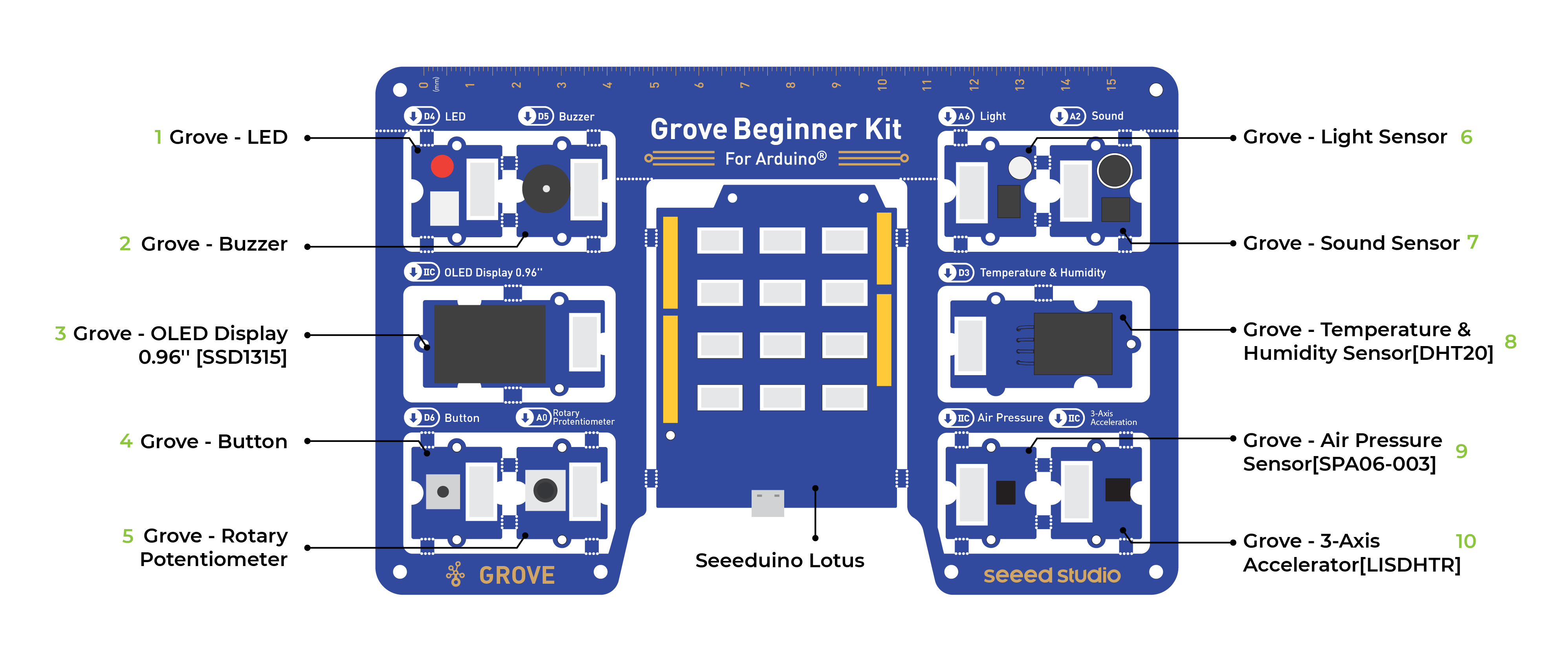
Comparado con la versión anterior, esta nueva versión actualiza ciertos sensores descontinuados. El sensor de temperatura y humedad DHT11 ha sido reemplazado con el sensor de temperatura y humedad DHT20; el sensor de presión barométrica BMP280 ha sido reemplazado con el sensor de presión barométrica SPA06-003.
Nota: Dimensiones - 17.69 11.64 1.88cm
- Grove - LED: Módulo LED simple
- Grove - Buzzer: Zumbador Piezoeléctrico
- Grove - OLED Display 0.96": Resolución de puntos 128×64, alto brillo, autoemisión y alta relación de contraste. Pantalla grande en un diseño compacto. Bajo consumo de energía.
- Grove - Button: Botón Pulsador Momentáneo
- Grove - Rotary Potentiometer: Potenciómetro Ajustable
- Grove - Light: Detecta la intensidad de luz circundante
- Grove - Sound: Detecta la intensidad de sonido circundante
- Grove - Temperature & Humidity Sensor: Detecta los valores de temperatura y humedad circundantes. La versión anterior usaba el sensor DHT11, mientras que las versiones posteriores a 2025.10 usan el sensor DHT20.
- Grove - Air Pressure Sensor: Detecta la presión atmosférica circundante
- Grove - 3-Axis Accelerator: Detecta la aceleración del objeto
- Seeeduino Lotus: Placa Compatible con Arduino con Puertos Grove
Nota: Por defecto, los módulos Grove están conectados al Seeeduino a través de orificios de estampado de PCB. Esto significa que no necesitas usar cables Grove para conectar si no están separados. Los pines por defecto son los siguientes:
| Módulos | Interfaz | Pines/Dirección |
|---|---|---|
| LED | Digital | D4 |
| Buzzer | Digital | D5 |
| OLED Display 0.96" | I2C | I2C, 0x78(por defecto) |
| Button | Digital | D6 |
| Rotary Potentiometer | Analógico | A0 |
| Light | Analógico | A6 |
| Sound | Analógico | A2 |
| Temperature & Humidity Sensor | Digital | D3 |
| Air Pressure Sensor | I2C | I2C, 0x77(por defecto) / 0x76(opcional) |
| 3-Axis Accelerator | I2C | I2C, 0x19(por defecto) |
Instrucciones de Separación
Atención: Ten cuidado de no cortarte las manos al usar un cuchillo
Si prefieres usar los módulos en otro lugar, entonces simplemente puedes seguir los procedimientos para separar los módulos.
Paso 1
Usa un cuchillo u objeto afilado para cortar en los orificios de estampado que conectan los sensores
Paso 2
Agita los módulos hacia arriba y abajo y deberían salir bastante fácilmente.
Lista de Partes
| Módulos | Cantidad |
|---|---|
| Sensores | |
| Sensores de Temperatura y Humedad | x1 |
| Acelerómetros de 3 Ejes | x1 |
| Presión de Aire | x1 |
| Sensor de Luz | x1 |
| Sensor de Sonido | x1 |
| Módulos de Entrada | |
| Potenciómetro Rotativo | x1 |
| Botón | x1 |
| Módulos de Salida | |
| LED | x1 |
| Buzzer | x1 |
| Módulo de Pantalla | |
| Pantalla OLED | x1 |
| Cables Grove | x6 |
| Cable Micro USB (versión anterior) / Cable USB (nueva versión fechada en octubre de 2025) | x1 |
Objetivos de Aprendizaje
- Fundamentos de Sistemas de Hardware de Código Abierto.
- Programación Básica de Arduino.
- Principios y métodos de comunicación para sensores.
- Implementación práctica de proyectos de Hardware de Código Abierto.
Demo de Desempaquetado Plug and Play
El Grove Beginner Kit tiene un demo de desempaquetado plug and play, donde primero conectas la alimentación a la placa, ¡obtienes la oportunidad de experimentar todos los sensores de una vez! ¡Usa el botón y el potenciómetro rotativo para experimentar cada demo de sensor!

- Desplazar -> Rotar Potenciómetro Rotativo
- Seleccionar -> Presión Corta del Botón
- Salir del Demo Actual -> Presión Larga del Botón
Los módulos Buzzer y LED se usan para indicación de teclas.
Cómo Empezar Con Arduino
Instalar el Arduino IDE
- Arduino IDE es un entorno de desarrollo integrado para Arduino, que se usa para programación de software de microcontroladores de chip único, descarga, pruebas y demás.
- Descarga e Instala Arduino IDE para tu sistema operativo deseado aquí.

Instalar el controlador USB
-
Arduino se conecta a la PC a través de un cable USB. El controlador USB depende del tipo de chip USB que estés usando en tu Arduino. Nota: Los chips USB generalmente están impresos en la parte posterior de la placa de desarrollo.
- Descarga el Controlador USB CP2102. Nota: Descarga según tu SO.
- Después de que se complete la instalación del controlador, conecta Arduino al puerto USB de la PC con un cable USB.
- Para usuarios de Windows: Puedes verlo en
Mi PC->Propiedades->Hardware->Administrador de Dispositivos. Aparecerá unCOM. - Para usuarios de Mac OS: Puedes navegar a `` en la esquina superior izquierda, y elegir
Acerca de esta Mac->Informe del Sistema...->USB. Debería aparecer un Controlador USB CP2102.
- Para usuarios de Windows: Puedes verlo en
- Si el controlador no está instalado, o si el controlador está instalado incorrectamente (no coincide con el modelo del chip), aparecerá como un "dispositivo desconocido" en el administrador de dispositivos. En este punto, el controlador debe reinstalarse.
Iniciar el Arduino IDE
1.Abre el Arduino IDE en tu PC.
2.Haz clic en Tools -> Board-> Arduino AVR Boards-> Arduino Uno para seleccionar el Modelo de Placa de Desarrollo correcto. Selecciona Arduino Uno como Placa.

3.Haz clic en Tools -> Port para seleccionar el Puerto correcto (el Puerto Serie mostrado en el Administrador de Dispositivos en el paso anterior). En este caso, se selecciona COM11. Para usuarios de Mac OS, debería ser /dev/cu.SLAB_USBtoUART.

4.Crea un nuevo archivo de Arduino y nómbralo Hello.ino, luego copia el siguiente código en él:
void setup() {
Serial.begin(9600); // initializes the serial port with a baud rate of 9600
}
void loop() {
Serial.println("hello, world"); // prints a string to a serial port
delay(1000); //delay of 1 second
}
5.En la esquina superior izquierda del Arduino IDE, hay dos botones, Verificar y Cargar. Primero, presiona el botón Verificar(✓) para compilar. Después de que la compilación sea exitosa, presiona el botón de carga(→).

6.Navega a Tools -> Serial Monitor, o haz clic en el Serial Monitor en la esquina superior derecha(Símbolo de Lupa), puedes ver los resultados de ejecución del programa:

Nota: Si instalaste el Arduino IDE portátil desde nuestra Unidad USB, puedes encontrar todas las demos de módulos en Files -> Sketch Book, así como todas las librerías de módulos, están preinstaladas con Arduino IDE.

Nota: Todos los módulos están precableados en una sola placa de circuito, por lo que no se necesitan cables ni soldadura. Sin embargo, si separas los módulos y quieres conectarlos con cables Grove, por favor revisa amablemente la Guía de Separación.
Guía de Lecciones
Lección 1: Parpadeo con el LED
Hemos completado el programa de salida "Hello world". Ahora aprendamos cómo encender el módulo LED. Conocemos los tres componentes básicos de un sistema de control: Entrada, Control y Salida. Pero encender el LED usa solo la salida, no la entrada. Seeeduino es la unidad de control, el módulo LED es la unidad de salida y la señal de salida es una señal digital.
Información de Contexto:
- ¿Qué es una Señal Digital?
Señal digital: La señal digital se refiere al valor de la amplitud que es discreto, la amplitud está limitada a un número finito de valores. En nuestro controlador, la señal digital tiene dos estados: LOW(0V) para 0; HIGH(5V) para 1. Así que enviar una señal HIGH al LED puede encenderlo.

Componentes Involucrados
- Seeeduino Lotus
- Grove LED
- Cable Grove (Si está separado)

Conexión de hardware
- Conexión del módulo
- Conexión predeterminada por orificio de estampado PCB.
- Conecta el Seeeduino a la computadora a través del cable USB.
-Código de software
- Abre Arduino IDE.
- Copia el siguiente código, haz clic en Verificar para comprobar errores de sintaxis. Verifica que no haya errores y puedes cargar el código.
//LED Blink
//The LED will turn on for one second and then turn off for one second
int ledPin = 4;
void setup() {
pinMode(ledPin, OUTPUT);
}
void loop() {
digitalWrite(ledPin, HIGH);
delay(1000);
digitalWrite(ledPin, LOW);
delay(1000);
}
Análisis del código
setup(){
}
La función setup() se llama cuando un sketch inicia. Úsala para inicializar variables, modos de pines, comenzar a usar librerías, etc. La función setup() solo se ejecutará una vez, después de cada encendido o reinicio de la placa Arduino.
loop(){
}
Después de crear una función setup(), que inicializa y establece los valores iniciales, la función loop() hace precisamente lo que su nombre sugiere, y se ejecuta consecutivamente en bucle, permitiendo que tu programa cambie y responda. Úsala para controlar activamente la placa Arduino.
int ledPin = 4;
Descripción:
Convierte un valor al tipo de dato int.
Sintaxis:
int(x) o (int)x (conversión de tipo estilo C)
Parámetros:
x: un valor. Tipos de datos permitidos: cualquier tipo.
Asignó un tipo int 4 a la variable llamada ledPin.
pinMode(ledPin, OUTPUT);
Descripción:
Configura el pin especificado para comportarse como entrada o salida. Consulta la página de Pines Digitales para detalles sobre la funcionalidad de los pines.
A partir de Arduino 1.0.1, es posible habilitar las resistencias pull-up internas con el modo INPUT_PULLUP. Además, el modo INPUT desactiva explícitamente las resistencias pull-up internas.
Sintaxis:
pinMode(pin, mode)
Parámetros:
pin: el número de pin de Arduino para establecer el modo.
mode: INPUT, OUTPUT, o INPUT_PULLUP.
Configurando ledPin al modo de salida.
digitalWrite(ledPin, HIGH);
Descripción:
Escribe un valor HIGH o LOW a un pin digital.
Si el pin ha sido configurado como OUTPUT con pinMode(), su voltaje se establecerá al valor correspondiente: 5V (o 3.3V en placas de 3.3V) para HIGH, 0V (tierra) para LOW.
Si el pin está configurado como INPUT, digitalWrite() habilitará (HIGH) o deshabilitará (LOW) la resistencia pull-up interna en el pin de entrada. Se recomienda establecer pinMode() a INPUT_PULLUP para habilitar la resistencia pull-up interna. Consulta el tutorial de Pines Digitales para más información.
Si no estableces pinMode() a OUTPUT, y conectas un LED a un pin, al llamar digitalWrite(HIGH), el LED puede aparecer tenue. Sin establecer explícitamente pinMode(), digitalWrite() habrá habilitado la resistencia pull-up interna, que actúa como una gran resistencia limitadora de corriente.
Sintaxis:
digitalWrite(pin, value)
Parámetros:
pin: el número de pin de Arduino.
value: HIGH o LOW.
Cuando establecemos ledPin como salida, HIGH significa enviar nivel alto al pin, el LED se enciende.
digitalWrite(ledPin, LOW);
Cuando establecemos el led como salida, low significa enviar nivel bajo al pin, el LED se apaga.
delay(1000);
Descripción:
Pausa el programa por la cantidad de tiempo (en milisegundos) especificada como parámetro. (Hay 1000 milisegundos en un segundo.)
Sintaxis:
delay(ms)
Parámetros:
ms: el número de milisegundos a pausar. Tipos de datos permitidos: unsigned long.
Retrasa el programa por 1000ms (1s).
Efecto de demostración y resultado de impresión serie:
El módulo LED estará 1 segundo encendido y 1 segundo apagado.
Ajuste de brillo del LED:
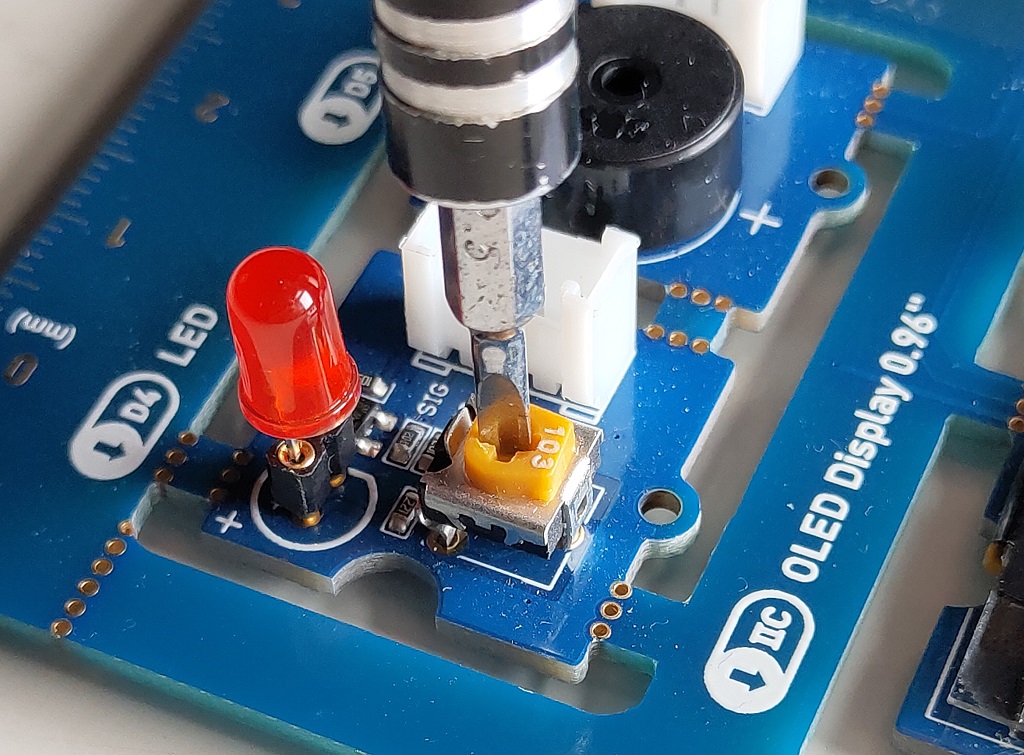
En el módulo Grove LED, hay una resistencia variable que se puede ajustar usando un destornillador. ¡Gírala para hacer que el LED se ilumine más brillante!
Guía de separación
Si los módulos están separados de la placa. Usa un cable Grove para conectar el Grove LED a la interfaz digital D4 del Seeeduino Lotus.
Lección 2: Presionar botón para encender LED
Lo primero que necesitamos saber es que la entrada del botón es una señal digital, y solo hay dos estados, 0 o 1, por lo que podemos controlar la salida basándonos en esos dos estados.
- Práctica: Usar botón para encender y apagar el módulo LED
Componentes involucrados
- Seeeduino Lotus
- Grove LED
- Grove Button
- Cables Grove (Si están separados)

Conexión de hardware
-
Conexión del módulo:
- Conexión predeterminada por orificio de estampado PCB.
-
El Seeeduino se conecta luego a la computadora a través de un cable USB.
-
Análisis de hardware:
- Entrada: Botón
- Control: Seeeduino
- Salida: Módulo LED
Tanto el sensor como el LED usan señales digitales, por lo que deben conectarse a interfaces digitales.
- Código de software:
- Abre Arduino IDE.
- Copia el siguiente código, haz clic en Verificar para comprobar errores de sintaxis. Verifica que no haya errores y puedes cargar el código.
//Button to turn ON/OFF LED
//Constants won't change. They're used here to set pin numbers:
const int buttonPin = 6; // the number of the pushbutton pin
const int ledPin = 4; // the number of the LED pin
// variables will change:
int buttonState = 0; // variable for reading the pushbutton status
void setup() {
// initialize the LED pin as an output:
pinMode(ledPin, OUTPUT);
// initialize the pushbutton pin as an input:
pinMode(buttonPin, INPUT);
}
void loop() {
// read the state of the pushbutton value:
buttonState = digitalRead(buttonPin);
// check if the pushbutton is pressed. If it is, the buttonState is HIGH:
if (buttonState == HIGH) {
// turn LED on:
digitalWrite(ledPin, HIGH);
} else {
// turn LED off:
digitalWrite(ledPin, LOW);
}
}
Análisis del código
pinMode(ledPin, OUTPUT);
Define LED como la unidad de salida.
pinMode(buttonPin, INPUT);
Define botón como la unidad de entrada.
buttonState = digitalRead(buttonPin);
Descripción:
Lee el valor de un pin digital especificado, ya sea HIGH o LOW.
Sintaxis:
digitalRead(pin)
Parámetros:
pin: el número de pin de Arduino que quieres leer
Esta función se usa para leer los estados de los pines digitales, ya sea HIGH o LOW. Cuando el botón está presionado, el estado es HIGH, de lo contrario es LOW.
if (buttonState == HIGH) {
digitalWrite(ledPin, HIGH);
} else {
digitalWrite(ledPin, LOW);
}
}
Descripción:
El if…else permite mayor control sobre el flujo del código que la declaración if básica, al permitir que múltiples pruebas se agrupen. Una cláusula else (si existe) se ejecutará si la condición en la declaración if resulta en falso. El else puede preceder otra prueba if, de modo que múltiples pruebas mutuamente excluyentes pueden ejecutarse al mismo tiempo.
Cada prueba procederá a la siguiente hasta que se encuentre una prueba verdadera. Cuando se encuentra una prueba verdadera, se ejecuta su bloque de código asociado, y el programa luego salta a la línea que sigue a toda la construcción if/else. Si ninguna prueba resulta ser verdadera, se ejecuta el bloque else predeterminado, si está presente, y establece el comportamiento predeterminado.
Ten en cuenta que un bloque else if puede usarse con o sin un bloque else terminante y viceversa. Se permite un número ilimitado de tales ramas else if.
Sintaxis:
if (condition1) {
// do Thing A
}
else if (condition2) {
// do Thing B
}
else {
// do Thing C
}
El uso de la declaración es: si la expresión lógica entre paréntesis es verdadera, ejecuta la declaración entre llaves después de if, si no, ejecuta la declaración entre llaves después del else. Si el estado del botón es alto, el pin LED emite un nivel alto y enciende el LED, de lo contrario apaga el LED.
Efecto de demostración y resultado de impresión serie:
Presionar el botón encenderá el módulo LED.
Guía de separación
Usa un cable Grove para conectar el Grove LED a la interfaz digital D4 del Seeeduino Lotus. Conecta el Grove Button a la interfaz digital D6.
Lección 3: Controlando la frecuencia del parpadeo
En la sección anterior, estudiamos que el botón solo tiene dos estados, estado ON/OFF correspondiente a 0V y 5V, pero en la práctica, a menudo encontramos la necesidad de muchos estados, no solo 0V y 5V. ¡Entonces necesitas usar Señal Analógica! El Potenciómetro Rotatorio es un ejemplo clásico que usa una señal analógica.
Información de fondo:
- Qué es una Señal Analógica
Señales analógicas: Las señales varían continuamente en tiempo y valor, y la amplitud, frecuencia o fase de la señal cambia continuamente en cualquier momento, como la señal de sonido de transmisión actual, o señal de imagen, etc. La señal analógica tiene onda senoidal y onda triangular y así sucesivamente. Los pines analógicos de tu microcontrolador pueden tener entre 0V y 5V mapeados a un rango entre 0 y 1023 donde 1023 se mapea como 5V y 512 se mapea como 2.5v y etc.

Componentes involucrados
- Seeeduino Lotus
- Grove LED
- Grove Rotary Switch
- Cables Grove (Si están separados)

Conexión de hardware
-
Conexión del módulo:
- Conexión predeterminada por orificio de estampado PCB.
-
El Seeeduino se conecta luego a la computadora a través de un cable USB.
-
Análisis de hardware:
- Entrada: Potenciómetro Rotatorio
- Control: Seeeduino Lotus
- Salida: Módulo LED
La entrada es una señal analógica, por lo que se conecta a la interfaz de señal analógica, el módulo LED se conecta a la interfaz de señal digital.
Software
- Abre Arduino IDE.
- Copia el siguiente código, haz clic en Verificar para comprobar errores de sintaxis. Verifica que no haya errores y puedes subir el código.
//Rotary controls LED
int rotaryPin = A0; // select the input pin for the rotary
int ledPin = 4; // select the pin for the LED
int rotaryValue = 0; // variable to store the value coming from the rotary
void setup() {
// declare the ledPin as an OUTPUT:
pinMode(ledPin, OUTPUT);
pinMode(rotaryPin, INPUT);
}
void loop() {
// read the value from the sensor:
rotaryValue = analogRead(rotaryPin);
// turn the ledPin on
digitalWrite(ledPin, HIGH);
// stop the program for <sensorValue> milliseconds:
delay(rotaryValue);
// turn the ledPin off:
digitalWrite(ledPin, LOW);
// stop the program for for <sensorValue> milliseconds:
delay(rotaryValue);
}
Análisis del Código
int rotaryPin = A0; // select the input pin for the rotary
int ledPin = 4; // select the pin for the LED
Descripción:
Puedes notar que definimos rotatePin y ledPin de diferentes maneras. Esto es porque el Potenciómetro Rotatorio genera una señal analógica, y el LED es controlado por una señal digital.
Para definir un Pin Analógico, usa A + el número del Pin (Por ejemplo aquí A0).
Para definir un Pin Digital, usa solo el número del pin (Por ejemplo aquí 4).
rotaryValue = analogRead(rotaryPin);
Descripción:
Lee el valor del pin analógico especificado. Las placas Arduino contienen un convertidor analógico a digital multicanal de 10 bits. Esto significa que mapeará voltajes de entrada entre 0 y el voltaje de operación (5V o 3.3V) en valores enteros entre 0 y 1023. En un Arduino UNO, por ejemplo, esto produce una resolución entre lecturas de: 5 voltios / 1024 unidades o, 0.0049 voltios (4.9 mV) por unidad.
Sintaxis:
analogRead(pin)
Parámetros:
pin: el nombre del pin de entrada analógica del cual leer (A0 a A5 en la mayoría de las placas).
Retorna: La lectura analógica en el pin. Aunque está limitada a la resolución del convertidor analógico a digital (0-1023 para 10 bits o 0-4095 para 12 bits). Tipo de dato: int.
Esta función se usa para leer el valor de los pines analógicos (la posición del sensor rotatorio), el rango de valores es: 0 ~ 1023.
delay(rotaryValue);
Función de retardo, La duración en milisegundos del retardo es el valor entre paréntesis. Debido a que el valor es el valor de la señal analógica del pin de la perilla que se está leyendo, el tiempo de retardo puede ser controlado por la perilla.
Efecto de Demostración y Resultado de Impresión Serial:
Girar el Potenciómetro cambiará la frecuencia del parpadeo del LED.
Guía de Conexión
Usa un cable Grove para conectar el LED a la interfaz digital D4 del Seeeduino Lotus, y un cable Grove para conectar el Grove Rotary Switch a la interfaz de señal analógica A0.
Lección 4: Hacer que el Buzzer haga BEEP
Al igual que el módulo LED, el Buzzer también es un módulo de salida, en lugar de encenderse produce un sonido de pitido. Esto puede usarse en muchas situaciones con fines de indicación. ¡Aprendamos cómo generar sonido usando el buzzer!
Información de Contexto:
- ¿Cuál es la diferencia entre Buzzer Activo y Pasivo?
Hay dos tipos de buzzers, uno es activo y el otro es pasivo. Tanto los buzzers activos como pasivos se usan para hacer sonido en electrónicos.
El buzzer activo tiene una fuente de oscilación interna que hace que el buzzer suene cuando se aplica energía. Los buzzers activos se usan ampliamente en computadoras, impresoras, copiadoras, alarmas, juguetes electrónicos, electrónicos de automóviles, teléfonos, temporizadores y otros dispositivos de sonido de productos electrónicos.
Un buzzer pasivo no tiene fuente interna de oscilación y necesita ser controlado por una onda cuadrada y una frecuencia diferente. Actúa como un altavoz electromagnético, y la señal de entrada cambiante produce sonido, en lugar de un tono automáticamente.
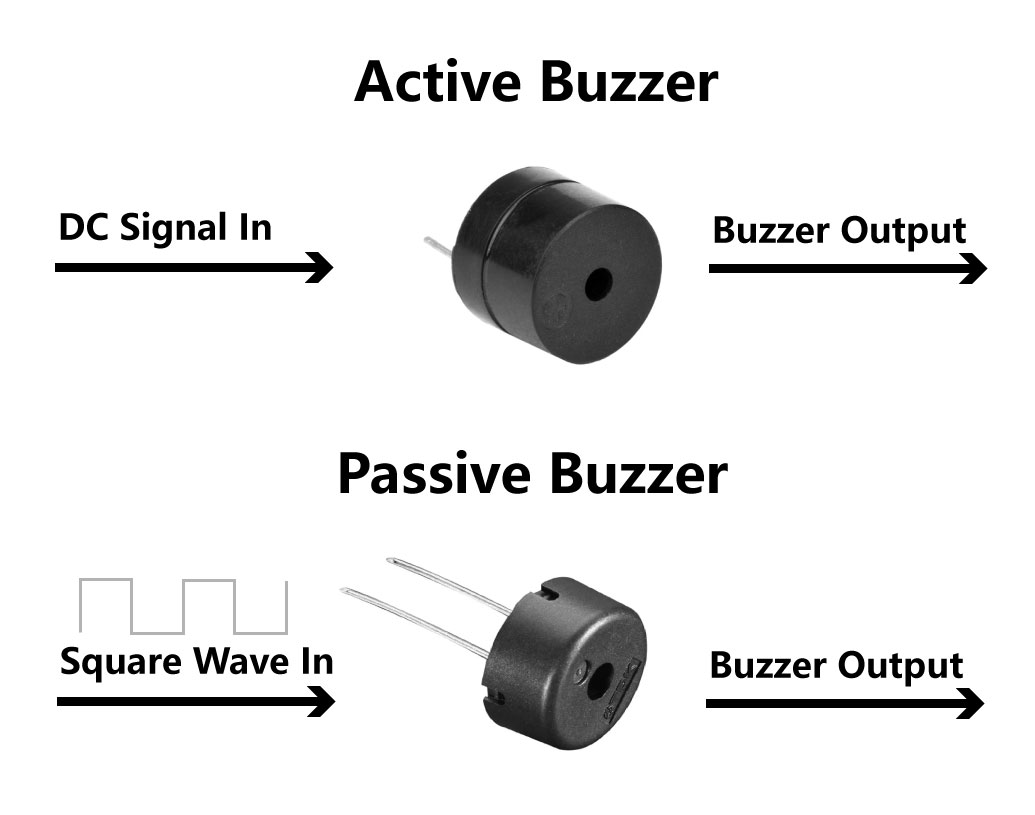
En este kit, el Grove-Buzzer es un buzzer pasivo por lo que necesita una señal AC para controlarlo. Esto lleva a la siguiente pregunta, ¡cómo generar Ondas Cuadradas (señales AC) con Arduino! Bueno, una manera fácil es usar PWM.
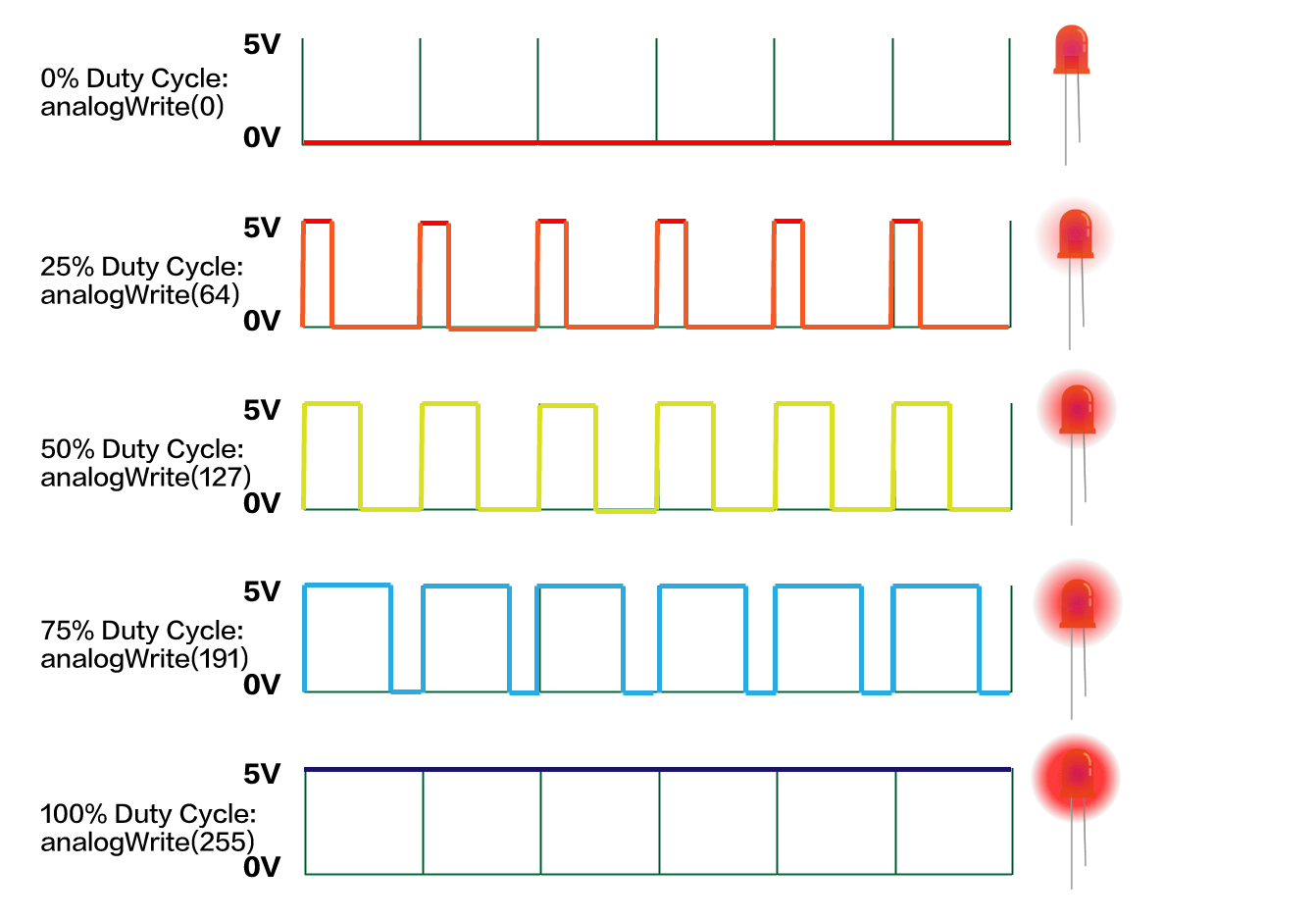
- ¿Qué es PWM?
Modulación por Ancho de Pulso, o PWM, es una técnica para obtener resultados analógicos con medios digitales. El control digital se usa para crear una onda cuadrada, una señal que cambia entre encendido y apagado. Este patrón de encendido-apagado puede simular voltajes entre completamente encendido (5 Voltios) y apagado (0 Voltios) cambiando la porción del tiempo que la señal pasa encendida versus el tiempo que la señal pasa apagada. La duración del "tiempo encendido" se llama ancho de pulso. Para obtener valores analógicos variables, cambias, o modulas, ese ancho de pulso. Si repites este patrón de encendido-apagado lo suficientemente rápido, el resultado es como si la señal fuera un voltaje constante entre 0 y 5v como una señal AC. Referencia: Arduino. Esta señal PWM puede entonces usarse para controlar el buzzer pasivo con facilidad.
Para generar señales PWM en Arduino, puedes usar analogWrite(), en contraste con usar digitalWrite() para generar señales DC.
Hay seis pines digitales en tu Seeeduino que están marcados con el símbolo "~", lo que significa que pueden enviar una señal PWM: 3,5,6,9,10,11. Se llaman pines PWM.
Componentes Involucrados
- Seeeduino Lotus
- Grove Buzzer
- Cable Grove (Si está separado)

Conexión de Hardware
- Conexión del módulo
- Conexión predeterminada por orificio de estampado PCB.
- Conecta el Seeeduino a la computadora a través del cable USB.
Código de Software
- Abre Arduino IDE.
- Copia el siguiente código, haz clic en Verificar para comprobar errores de sintaxis. Verifica que no haya errores y puedes subir el código.
int BuzzerPin = 5;
void setup() {
pinMode(BuzzerPin, OUTPUT);
}
void loop() {
analogWrite(BuzzerPin, 128);
delay(1000);
analogWrite(BuzzerPin, 0);
delay(0);
}
Análisis del Código
analogWrite(BuzzerPin, 128);
Descripción:
Escribe un valor analógico (onda PWM) a un pin. Puede usarse para encender un LED con diferentes brillos o manejar un motor a varias velocidades. Después de una llamada a analogWrite(), el pin generará una onda rectangular constante del ciclo de trabajo especificado hasta la siguiente llamada a analogWrite() (o una llamada a digitalRead() o digitalWrite()) en el mismo pin.
Sintaxis:
analogWrite(pin, value)
Parámetros:
pin: el pin de Arduino al cual escribir. Tipos de datos permitidos: int.
value: el ciclo de trabajo: entre 0 (siempre apagado) y 255 (siempre encendido). Tipos de datos permitidos: int.
Escribe un valor analógico (onda PWM) al Buzzer.
Efecto de Demostración y Resultado de Impresión Serial:
El Buzzer hace pitidos.
Guía de Conexión
Usa un cable Grove para conectar el Grove Buzzer a la interfaz digital D5 del Seeeduino Lotus.
Uso de PWM
Ahora que hemos aprendido el uso de PWM, además de usar PWM para controlar el buzzer pasivo, también podemos usar PWM para controlar la velocidad del motor y el brillo de las luces LED y etc.
Como indica el diagrama a continuación, usa analogWrite() para generar ondas PWM, mientras mayor sea el porcentaje del Ciclo de Trabajo, más brillante será el LED.
Sin embargo, el Módulo LED en el Grove Beginner Kit no puede ser controlado directamente por PWM, porque el módulo LED está conectado a D4, y como se mencionó anteriormente, los pines PWM son 3, 5, 6, 9, 10, 11, y el pin 4 no es un pin PWM. Si quieres controlar el LED con PWM, necesitas desconectarlo y usar el cable Grove para conectar al puerto Grove con función PWM.
Por ejemplo, conectemos Grove-LED a D3 usando un cable Grove:
!!!Note D3 también está interconectado al Grove-Temperature & Humidity Sensor, y por lo tanto este ejemplo no puede usarse junto con el Grove-Temperature & Humidity Sensor.
int LED = 3; // Cable connection from LED to D3
int Potentiometer = A0;
void setup() {
pinMode(LED, OUTPUT);
pinMode(Potentiometer, INPUT);
}
void loop() {
int potentioValue, Value;
potentioValue = analogRead(Potentiometer);
Value = map(potentioValue, 0, 1023, 0, 255); //Mapping potentiometer value to PWM signal value
analogWrite(LED, Value);
}
Compila y sube el código ¡deberías poder girar y ajustar el brillo del LED usando señales PWM!
Análisis del Código
Value = map(potentioValue, 0, 1023, 0, 255);
Descripción:
Re-mapea un número de un rango a otro. Es decir, un valor de fromLow se mapearía a toLow, un valor de fromHigh a toHigh, valores intermedios a valores intermedios, etc.
No restringe valores dentro del rango, porque los valores fuera del rango a veces son intencionados y útiles. La función constrain() puede usarse antes o después de esta función, si se desean límites a los rangos.
Nota que los "límites inferiores" de cualquier rango pueden ser mayores o menores que los "límites superiores" por lo que la función map() puede usarse para invertir un rango de números, por ejemplo
y = map(x, 1, 50, 50, 1);
La función también maneja bien los números negativos, por lo que este ejemplo
y = map(x, 1, 50, 50, -100);
también es válido y funciona bien.
La función map() usa matemáticas enteras por lo que no generará fracciones, cuando las matemáticas podrían indicar que debería hacerlo. Los residuos fraccionarios se truncan y no se redondean o promedian.
Sintaxis:
map(value, fromLow, fromHigh, toLow, toHigh)
Parámetros:
value: el número a mapear.
fromLow: el límite inferior del rango actual del valor.
fromHigh: el límite superior del rango actual del valor.
toLow: el límite inferior del rango objetivo del valor.
toHigh: el límite superior del rango objetivo del valor.
Mapeo de la señal analógica del sensor potenciómetro (0 a 1023) al volumen de la luz (0 a 255).
Efecto de la Demo y Resultado de Impresión Serial:
Ajusta el potenciómetro para ajustar el brillo del LED.
En resumen, cuando quieras usar la función PWM, asegúrate de seleccionar aquellos pines con un símbolo "~" delante de sus nombres.
Lección 5: Creando un LED Inductivo de Luz
El sensor de luz contiene una resistencia fotosensible para medir la intensidad de la luz. La resistencia de la resistencia fotosensible disminuye con el aumento de la intensidad de la luz. El LED se encenderá si el entorno está oscuro, y permanecerá apagado si el entorno está brillante.
En las siguientes secciones, usaremos el Monitor Serial para observar los resultados de nuestros sensores, ¡así que aquí viene una breve introducción!
Información de Fondo:
- Qué es el Monitor Serial
El Monitor Serial es una herramienta útil para observar resultados en Arduino, puede ser muy útil en términos de imprimir resultados de los sensores o depurar en general. ¡También puedes enviar datos de vuelta al controlador a través del monitor serial para realizar ciertas tareas! Nota: Asegúrate de que la transferencia de datos Serial coincida con el código.

Puedes abrir el Monitor Serial haciendo clic en Tools -> Serial Monitor.

Componentes Involucrados
- Seeeduino Lotus
- Grove LED
- Grove Sensor de Luz
- Cable Grove (Si está separado)

Conexión de hardware
-
Conexión del módulo:
- Conexión predeterminada por orificio de estampado PCB.
-
El Seeeduino se conecta luego a la computadora a través de un cable USB.
-
Análisis de hardware:
- Entrada: Sensor de Luz
- Control: Seeeduino Lotus
- Salida: módulo LED
Código de Software
- Abre Arduino IDE.
- Copia el siguiente código, haz clic en Verificar para comprobar errores de sintaxis. Verifica que no haya errores, y puedes subir el código.
// Light Switch
int sensorpin = A6; // Analog input pin that the sensor is attached to
int ledPin = 4; // LED port
int sensorValue = 0; // value read from the port
int outputValue = 0; // value output to the PWM (analog out)
void setup() {
pinMode(ledPin,OUTPUT);
pinMode(sensorpin, INPUT);
Serial.begin(9600);
}
void loop() {
// read the analog in value:
sensorValue = analogRead(sensorpin);
Serial.println(sensorValue);
if (sensorValue < 200) {
digitalWrite(ledPin, HIGH);
}
else {
digitalWrite(ledPin, LOW);
}
delay(200);
}
También puedes ver las lecturas de intensidad de luz desde el Monitor Serial, navega a Tools -> Serial Monitor.
Análisis del Código
Serial.begin(9600);
Descripción:
Establece la velocidad de datos en bits por segundo (baudios) para la transmisión de datos serial. Para comunicarse con el Monitor Serial, asegúrate de usar una de las velocidades de baudios listadas en el menú en la esquina inferior derecha de su pantalla. Sin embargo, puedes especificar otras velocidades - por ejemplo, para comunicarte a través de los pines 0 y 1 con un componente que requiere una velocidad de baudios particular.
Un segundo argumento opcional configura los bits de datos, paridad y parada. El predeterminado es 8 bits de datos, sin paridad, un bit de parada.
El software que se ejecuta en la computadora se comunica con la placa de desarrollo, y la velocidad de baudios es 9600.
Sintaxis:
Serial.begin(speed)
Parámetros:
speed: Velocidad de comunicación Serial. ej. 9600, 115200 y etc.
Establece la velocidad de baudios Serial a 9600.
Serial.println(sensorValue);
Descripción:
Imprime datos al puerto serial como texto ASCII legible por humanos seguido de un carácter de retorno de carro (ASCII 13, o '\r') y un carácter de nueva línea (ASCII 10, o '\n'). Este comando toma las mismas formas que Serial.print().
Sintaxis:
Serial.println(val) o Serial.println(val, format)
Parámetros:
val: el valor a imprimir. Tipos de datos permitidos: cualquier tipo de dato.
format: especifica la base numérica (para tipos de datos integrales) o el número de lugares decimales (para tipos de punto flotante).
El puerto serial imprime el valor del sensor de luz. Así que abres el monitor serial en la interfaz del IDE, y ves el valor del sensor de salida.
Efecto de la Demo y Resultado de Impresión Serial:
El módulo LED se encenderá si está oscuro y permanecerá apagado si está brillante.
Guía de Separación
Usa el Cable Grove para conectar el Grove LED a la interfaz de señal digital D4 del Seeeduino Lotus, conecta el Grove Sensor de Luz a la interfaz de señal analógica A6 del Seeeduino Lotus.
Lección 6: Luz LED Sensible al Sonido
El sensor de sonido puede detectar la intensidad del sonido del entorno, y su salida también es simulada. Estoy seguro de que todos han estado expuestos a las luces de control de sonido, pero ahora podemos hacer una nosotros mismos, y con los fundamentos, este experimento será fácil para ti. Aquí se usó el Plotter Serial para visualizar los resultados.
Información de Fondo:
- Qué es el Plotter Serial
El Plotter Serial es similar al Monitor Serial, permitiéndote graficar nativamente datos seriales desde tu Arduino a tu computadora en tiempo real. Esto es muy útil cuando los datos necesitan ser visualizados.

Puedes abrir el Plotter Serial haciendo clic en Tools -> Serial Plotter.

- Práctica: Las luces LED se encienden cuando se hace sonido. Cuando no hay sonido y está muy silencioso, las luces LED se apagan.
Componentes Involucrados
- Seeeduino Lotus
- Grove LED
- Grove Sensor de Sonido
- Cable Grove (Si está separado)

Conexión de hardware
- Conexión del módulo:
- Conexión predeterminada por orificio de estampado PCB.
- El Seeeduino se conecta luego a la computadora a través de un cable USB.
Código de Software
- Abre Arduino IDE.
- Copia el siguiente código, haz clic en Verificar para comprobar errores de sintaxis. Verifica que no haya errores, y puedes subir el código.
//Sound Control Light
int soundPin = A2; // Analog sound sensor is to be attached to analog
int ledPin = 4; // Digital LED is to be attached to digital
void setup() {
pinMode(ledPin, OUTPUT);
pinMode(soundPin, INPUT);
Serial.begin(9600);
}
void loop(){
int soundState = analogRead(soundPin); // Read sound sensor’s value
Serial.println(soundState);
// if the sound sensor’s value is greater than 400, the light will be on.
//Otherwise, the light will be turned off
if (soundState > 400) {
digitalWrite(ledPin, HIGH);
delay(100);
}else{
digitalWrite(ledPin, LOW);
}
}
También puedes ver las lecturas de intensidad de luz desde el Plotter Serial, navega a Tools -> Serial Plotter.
Nota: También puedes ajustar el valor según la intensidad de luz de tu entorno.
Análisis del Código
Serial.begin(9600);
El software que se ejecuta en la computadora se comunica con la placa de desarrollo, y la velocidad de baudios es 9600.
Serial.print(" ");
Esta función se usa para enviar datos desde el puerto serial, la salida es lo que está contenido en las comillas dobles.
Serial.println( );
Esta declaración es similar a la anterior, excepto que serial.println tiene un retorno de nueva línea.
Serial.println(soundState);
El puerto serial imprime el valor del sensor de sonido. Así que abres el monitor serial en la interfaz del IDE, y ves el valor del sensor de salida.
Efecto de la Demo y Resultado de Impresión Serial:
El módulo LED se encenderá si el entorno es lo suficientemente ruidoso.
Guía de Separación
Usa cables Grove para conectar el Grove LED a la interfaz de señal digital D4 del Seeeduino Lotus, Conecta el Grove Sensor de Sonido a la interfaz de señal analógica A2 del Seeeduino Lotus.
Lección 7: Mostrando Datos en OLED
La Pantalla OLED puede usarse para muchas situaciones, ¡donde podrías usarla para visualizar lecturas de sensores!
Información de Fondo:
- Qué son las Librerías de Arduino
El entorno de Arduino puede extenderse mediante el uso de librerías, al igual que la mayoría de otras plataformas de programación. Las librerías proporcionan funcionalidades adicionales para usar en sketches, es decir, trabajar con hardware específico o manipular datos. Para usar una librería en un sketch, selecciónala desde Sketch ->Include Library.

Para más información, por favor también visita Cómo instalar Librerías de Arduino.
Componentes Involucrados
- Seeeduino Lotus
- Grove OLED
- Cable Grove (Si está separado)

Conexión de hardware
- Conexión del módulo:
- Conexión predeterminada por orificio de estampado PCB.
- El Seeeduino se conecta luego a la computadora a través de un cable USB.
Código de Software
- Abre Arduino IDE.
- Instala la librería U8g2: Navega a Sketch -> Include Library -> Manage Libraries... y Busca la palabra clave "U8g2" en el Library Manager. Es la librería u8g2 por oliver, y haz clic luego instalar.

- Copia el siguiente código, haz clic en Verificar para comprobar errores de sintaxis. Verifica que no haya errores, y puedes subir el código.
#include <Arduino.h>
#include <U8x8lib.h>
U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* reset=*/ U8X8_PIN_NONE);
// U8X8_SSD1306_128X64_NONAME_SW_I2C u8x8(/* clock=*/ SCL, /* data=*/ SDA, /* reset=*/ U8X8_PIN_NONE); // OLEDs without Reset of the Display
void setup(void) {
//u8x8.setBusClock(100000); // If you breakout other modules, please enable this line
u8x8.begin();
u8x8.setFlipMode(1);
}
void loop(void) {
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 0);
u8x8.print("Hello World!");
}
!!!Atención Si separas todos los módulos y usas el Grove OLED por separado, puede que encuentres que no funciona con este código. Si encuentras tal problema, por favor consulta el final de esta sección: Guía de Separación.
- Análisis del código
#include <>
Descripción:
#include se usa para incluir librerías externas en tu sketch. Esto le da al programador acceso a un gran grupo de librerías estándar de C (grupos de funciones pre-hechas), y también librerías escritas especialmente para Arduino.
Nota que #include, similar a #define, no tiene terminador de punto y coma, y el compilador producirá mensajes de error crípticos si agregas uno.
#include <U8x8lib.h>
#include es una instrucción que introduce un archivo de cabecera. Aquí usamos la librería U8x8lib.h.
U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* reset=*/ U8X8_PIN_NONE);
Nota
Si separas otros módulos y solo usas OLED, tienes que usar I2C por software:
// U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* reset=*/ U8X8_PIN_NONE);
U8X8_SSD1306_128X64_NONAME_SW_I2C u8x8(/* clock=*/ SCL, /* data=*/ SDA, /* reset=*/ U8X8_PIN_NONE);
Descripción:
Una vez que el objeto es declarado, puedes usar funciones de la librería.
u8x8.begin();
Descripción:
Procedimiento de configuración simplificado de la pantalla para el entorno Arduino. Consulta la guía de configuración para la selección de un constructor U8g2 adecuado.
Sintaxis:
u8x8.begin()
Inicializa la librería u8g2
u8x8.setFlipMode(1);
Descripción:
Algunas pantallas soportan una rotación de 180 grados del buffer de marco interno. Esta característica de hardware puede ser controlada con este procedimiento. Importante: Redibuja la pantalla completa después de cambiar el modo de volteo. Lo mejor es limpiar la pantalla primero, luego cambiar el modo de volteo y finalmente redibujar el contenido. Los resultados serán indefinidos para cualquier contenido existente en la pantalla.
Sintaxis:
u8x8.setFlipMode(mode)
Parámetros:
mode: 0 o 1
Voltea la pantalla 180 grados.
u8x8.setCursor();
Descripción:
Define el cursor para la función print. Cualquier salida de la función print comenzará en esta posición.
Sintaxis:
u8x8.setCursor(x, y)
Parámetros:
x, y: Posición de columna/fila para el cursor de la función print.
Establece la posición del cursor de dibujo.
u8x8.setFont()
Descripción:
Define una fuente u8x8 para las funciones de dibujo de glifos y cadenas.
Sintaxis:
u8x8.setFont(font_8x8)
Establece la fuente para la pantalla.
u8x8.print();
Dibuja el contenido en el OLED.
Efecto de Demostración y Resultado de Impresión Serial:
Imprime Hello World en la Pantalla OLED.
Referencia de la Librería U8g2
Si quieres más información sobre la librería U8g2, por favor consulta aquí.
Guía de Separación
Usa el cable Grove para conectar el OLED a la interfaz I2C del Seeeduino Lotus (Nota: la dirección por defecto de I2C es 0x78).
!!!Nota
- Si separas otro módulo para usar el OLED y no funciona, o quieres usar el I2C OLED más rápido (por defecto: 40KHZ), por favor sigue esta instrucción:
Haz clic en "This PC" -> Documents -> Arduino -> libraries -> U8g2 -> src -> U8x8lib.cpp -> Deslízate a la línea 1334 -> elimina o deshabilita esta línea -> guarda el archivo.
Wire.setClock(u8x8->bus_clock); // just delete or disable this line
O puedes establecer el bloqueo del bus a 100000 y luego agregarlo en el setup().
void setup(void) {
u8x8.setBusClock(100000); // it for limit the I2C bus clock
u8x8.begin();
u8x8.setFlipMode(1);
}
Lección 8: Detectando Temperatura y Humedad del Entorno
¿Alguna vez te has preguntado sobre la temperatura y humedad de tu entorno? ¿Quieres saber el número exacto? ¿Quieres usar una falda o abrigo hoy dependiendo de la temperatura? ¡Hagamos un termómetro!
Información de Fondo:
- ¿Qué es la Señal de Protocolo (I2C)?
Señal de protocolo: el protocolo de señal que usamos es I2C, así que aquí hay una breve introducción a I2C. El bus I2C solo necesita dos cables en la transmisión de información de conexión entre los dispositivos: el SDA (Línea de Datos Serie) y SCL (Línea de Reloj Serie).
Estas dos líneas son líneas I/O bidireccionales, el componente principal usado para iniciar la transferencia de datos del bus, y generar el reloj para abrir el dispositivo de transmisión, cualquier dispositivo que esté siendo direccionado en este momento se considera desde el dispositivo.
La relación entre maestro y esclavo (emisor y receptor) en el bus no es constante sino que depende de la dirección de transmisión de datos. Si el host quiere enviar datos al dispositivo esclavo, el host primero direcciona el dispositivo esclavo, luego envía activamente datos al dispositivo esclavo, y finalmente termina la transmisión de datos por el host. Si el host va a recibir datos del esclavo, el esclavo es primero direccionado por el maestro.
El host luego recibe los datos enviados desde el dispositivo, y el host termina el proceso de recepción. En este caso. El host es responsable de generar el reloj de temporización y terminar la transferencia de datos.
- Práctica: Haz que tu Pantalla OLED muestre la temperatura y humedad ambiental actual.
Componentes Involucrados
- Seeeduino Lotus
- Grove OLED
- Sensor de Temperatura y Humedad Grove
- Cable Grove (Si está separado)

Conexión de hardware
- Conexión del módulo:
- Conexión por defecto por agujero de sello PCB.
- El Seeeduino se conecta luego a la computadora vía cable USB.
Nota
Algunos kits actualizados han sido equipados con DHT20. Si tu Detector de Humedad y Temperatura en el kit es negro entonces el detector es DHT20 y el código de ejemplo de este está después del DHT11.
Código de Software (DHT11)
- Abre Arduino IDE.
- Descarga e instala la librería requerida.
- Copia el siguiente código, haz clic en Verify para verificar errores de sintaxis. Verifica que no hay errores, y puedes subir el código.
//Temperature and Humidity Sensor
#include "DHT.h"
#include <Arduino.h>
#include <U8x8lib.h>
#define DHTPIN 3 // what pin we're connected to
#define DHTTYPE DHT11 // DHT 11
DHT dht(DHTPIN, DHTTYPE);
U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* reset=*/ U8X8_PIN_NONE);
void setup(void) {
Serial.begin(9600);
Serial.println("DHTxx test!");
dht.begin();
u8x8.begin();
u8x8.setPowerSave(0);
u8x8.setFlipMode(1);
}
void loop(void) {
float temp, humi;
temp = dht.readTemperature();
humi = dht.readHumidity();
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 33);
u8x8.print("Temp:");
u8x8.print(temp);
u8x8.print("C");
u8x8.setCursor(0,50);
u8x8.print("Humidity:");
u8x8.print(humi);
u8x8.print("%");
u8x8.refreshDisplay();
delay(200);
}
Código de Software (DHT20)
- Abre Arduino IDE.
- Descarga e instala la librería requerida.
- Copia el siguiente código, haz clic en Verify para verificar errores de sintaxis. Verifica que no hay errores, y puedes subir el código.
//Temperature and Humidity Sensor
#include "DHT.h"
#include <Arduino.h>
#include <U8x8lib.h>
#include "Wire.h"
#define DHTTYPE DHT20 // DHT 20
DHT dht(DHTTYPE);
#if defined(ARDUINO_ARCH_AVR)
#define debug Serial
#elif defined(ARDUINO_ARCH_SAMD) || defined(ARDUINO_ARCH_SAM)
#define debug SerialUSB
#else
#define debug Serial
#endif
U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* reset=*/ U8X8_PIN_NONE);
void setup(void) {
debug.begin(115200);
debug.println("DHTxx test!");
Wire.begin();
/*if using WIO link,must pull up the power pin.*/
// pinMode(PIN_GROVE_POWER, OUTPUT);
// digitalWrite(PIN_GROVE_POWER, 1);
dht.begin();
dht.begin();
u8x8.begin();
u8x8.setPowerSave(0);
u8x8.setFlipMode(1);
}
void loop(void) {
float temp, humi;
temp = dht.readTemperature();
humi = dht.readHumidity();
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 33);
u8x8.print("Temp:");
u8x8.print(temp);
u8x8.print("C");
u8x8.setCursor(0,50);
u8x8.print("Humidity:");
u8x8.print(humi);
u8x8.print("%");
u8x8.refreshDisplay();
delay(200);
}
Haz clic en "Monitor" en la esquina superior derecha y verifica el resultado.
Análisis del Código
float temp, humi;
Define variables para almacenar lecturas.
temp = dht.readTemperature();
humi = dht.readHumidity();
Descripción:
Funciones a ser usadas para leer valores de temperatura y humedad del sensor.
Sintaxis:
dht.readTemperature() y dht.readHumidity(). Tipo de retorno: float.
Llama estas funciones para leer la temperatura y humedad y almacenarlas en variables definidas.
Efecto de Demostración y Resultado de Impresión Serial:
La temperatura y humedad del entorno aparecen en la pantalla OLED.
Guía de Separación
Usa el cable Grove para conectar el OLED a la interfaz I2C del Seeeduino Lotus (Nota: la dirección por defecto de I2C es 0x78). Conecta el Sensor de Temperatura y Humedad Grove a la interfaz de señal digital D3 del Seeeduino Lotus.
Lección 9: Midiendo la Presión del Aire del Entorno
El Sensor de Presión de Aire Grove es una placa de conexión para medir la presión atmosférica. La versión anterior (antes de octubre de 2025) usaba el sensor BMP280, mientras que la nueva versión (después de octubre de 2025) usa el sensor SPA06-003. Ambos sensores pueden medir con precisión la temperatura y presión atmosférica. Como la presión atmosférica cambia con la altitud, también pueden medir la altitud aproximada de un lugar.
Componentes Involucrados
- Seeeduino Lotus
- Sensor de Presión de Aire Grove (BMP280 o SPA06-003)
- Cable Grove (si está separado)

Conexión de hardware
- Conexión del módulo:
- Conexión por defecto por agujero de sello PCB.
- El Seeeduino se conecta luego a la computadora vía cable USB.
Código de Software
Para BMP280 (Versión anterior antes de octubre de 2025)
- Abre Arduino IDE.
- Instala la librería Grove Barometer Sensor: Navega a Sketch -> Include Library -> Manage Libraries... y Busca la palabra clave "Grove BMP280" en el Library Manager, luego instala.

- Copia el siguiente código, haz clic en Verificar para comprobar errores de sintaxis. Verifica que no haya errores y puedes subir el código.
- En este programa, la información del sensor barómetro se envía desde el sensor al Seeeduino a través del bus I2C y luego el Seeeduino las imprime en el monitor serie. Abre el monitor serie para verificar el resultado.
//Air pressure detection
#include "Seeed_BMP280.h"
#include <Wire.h>
BMP280 bmp280;
void setup() {
Serial.begin(9600);
if (!bmp280.init()) {
Serial.println("Device not connected or broken!");
}
}
void loop() {
float pressure;
//get and print temperatures
Serial.print("Temp: ");
Serial.print(bmp280.getTemperature());
Serial.println("C"); // The unit for Celsius because original arduino don't support speical symbols
//get and print atmospheric pressure data
Serial.print("Pressure: ");
Serial.print(pressure = bmp280.getPressure());
Serial.println("Pa");
//get and print altitude data
Serial.print("Altitude: ");
Serial.print(bmp280.calcAltitude(pressure));
Serial.println("m");
Serial.println("\n");//add a line between output of different times.
delay(1000);
}
Análisis del Código
#include <Wire.h>
#include es una instrucción que introduce un archivo de cabecera. Aquí usamos la librería Wire.h, esta librería está incluida en Arduino IDE.
#include "Seeed_BMP280.h"
Representa el archivo de cabecera Seeed_BMP280.h que introduce la ruta actual.
if (!bmp280.init()) {
Serial.println("Device not connected or broken!");
}
Descripción:
Para inicializar el sensor de presión de aire usando bmp280.init(). Además, usando la condición if para verificar si se inició correctamente entonces omite el mensaje. Si tiene problemas para iniciar entonces imprime el mensaje ya que ! significa NO en programación.
Sintaxis:
bmp280.init()
si el sensor de presión de aire no se inició correctamente, entonces imprime un error en el monitor serie.
Serial.print(bmp280.getTemperature());
Descripción:
Funciones a usar para leer el valor de temperatura del sensor.
Sintaxis:
bmp280.getTemperature(). Tipo de retorno: float
Imprime los datos de temperatura en el monitor serie.
Serial.print(pressure = bmp280.getPressure());
Descripción:
Funciones a usar para leer el valor de presión de aire del sensor.
Sintaxis:
bmp280.getPressure(). Tipo de retorno: float
Imprime la presión de aire actual.
Serial.print(bmp280.calcAltitude(pressure));
Descripción:
Toma el valor de presión y puede convertirlo a altitud.
Sintaxis:
bmp280.calcAltitude(float). Tipo de retorno: float
Parámetro:
float: Valor de presión.
Imprime la amplitud.
Efecto de Demostración y Resultado de Impresión Serie:
Las lecturas de presión de aire se muestran en el Monitor Serie.
Guía de Conexión
Usa el cable Grove para conectar el Sensor de Presión de Aire Grove a la interfaz I2C del Seeeduino Lotus usando un cable Grove (nota: la dirección I2C por defecto es 0x77 o 0x76).
Para SPA06-003 (Nueva versión después de octubre de 2025)
El SPA06-003 es un sensor de presión barométrica de alta precisión que puede medir tanto presión como temperatura. Aquí te mostramos cómo usarlo con Arduino:
Instalación de Librería:
-
Descarga e instala la librería SPL07-003 para Arduino
-
La librería proporciona funciones para leer presión, temperatura y calcular altitud
Descripción: Este programa se interfaza con el sensor de presión y temperatura SPL07-003 para monitorear continuamente las condiciones atmosféricas. Inicializa el sensor con configuraciones de muestreo específicas (4Hz para presión con 32 muestras, 4Hz para temperatura con 1 muestra) y lee valores de presión, temperatura y altitud calculada en tiempo real, mostrando los resultados a través de comunicación serie.
#include <Wire.h>
#include "SPL07-003.h"
// Define SPL07-006 I2C address
#define SPL07_ADDR SPL07_ADDR_DEF // Default I2C address (SDO=high)
// #define SPL07_ADDR SPL07_ADDR_ALT // Alternate I2C address (SDO=low)
// Create SPL07-003 sensor instance
SPL07_003 spl;
//HardwareSerial SerialOut(PA10, PA9); //for STM32F103C8Tx
// Runs at startup
void setup() {
// Begin Serial
Serial.begin(115200);
// Configure & start I2C
//Wire.setSDA(PB7); //for STM32F103C8Tx
//Wire.setSCL(PB6); //for STM32F103C8Tx
Wire.begin();
// Connect to SPL07-003
if (spl.begin(SPL07_ADDR,&Wire) == false) {
Serial.println("Error initializing SPL07-003 :(");
while (1) {}
}//if
Serial.println("Connected to SPL07-003! :)");
// Set pressure & temperature sampling settings
spl.setPressureConfig(SPL07_4HZ, SPL07_32SAMPLES);
spl.setTemperatureConfig(SPL07_4HZ, SPL07_1SAMPLE);
// Set SPL07-003 to continuous measurements
spl.setMode(SPL07_CONT_PRES_TEMP);
}//setup()
// Runs continuously
void loop() {
// Wait for available reading
if (spl.pressureAvailable() || spl.temperatureAvailable()) {
// Read latest values
double pres = spl.readPressure();
double temp = spl.readTemperature();
double altitude = spl.calcAltitude();
// Print to serial
Serial.print("Pres: ");
Serial.print(pres, 3);
Serial.print(" Pa, Temp: ");
Serial.print(temp, 3);
Serial.print(" C, Altitude: ");
Serial.print(altitude, 3);
Serial.println(" m");
}//if
}//loop()
Lección 10: Detección de Movimiento
Este es el último sensor, el acelerómetro triaxial, y con este módulo, puedes agregar fácilmente monitoreo de movimiento a tu diseño. Así que podemos hacer muchos experimentos pequeños e interesantes basados en el movimiento.
- Práctica: cuando se detecta movimiento, el zumbador da una alarma indicando que el objeto está en movimiento.
Componentes Involucrados
- Seeeduino Lotus
- Acelerómetro Grove de 3 ejes
- Cable Grove (si está separado)

Conexión de Hardware
- Conexión del módulo:
- Conexión por defecto mediante orificio de estampado PCB.
- El Seeeduino se conecta luego a la computadora a través de un cable USB.
Código de Software
- Abre Arduino IDE.
- Descarga el Acelerómetro Digital de 3 Ejes (±2g a 16g) desde Github. Haz clic en Sketch > Include library > Add .ZIP library, importa la librería al IDE.
- Copia el siguiente código, haz clic en Verificar para comprobar errores de sintaxis. Verifica que no haya errores y puedes subir el código.
- En este programa, la información de aceleración se envía desde el sensor al Seeeduino a través del bus I2C y luego el Seeeduino las imprime en el monitor serie. Abre el monitor serie para verificar el resultado.
//Gravity Acceleration
#include "LIS3DHTR.h"
#ifdef SOFTWAREWIRE
#include <SoftwareWire.h>
SoftwareWire myWire(3, 2);
LIS3DHTR<SoftwareWire> LIS; //Software I2C
#define WIRE myWire
#else
#include <Wire.h>
LIS3DHTR<TwoWire> LIS; //Hardware I2C
#define WIRE Wire
#endif
void setup() {
Serial.begin(9600);
while (!Serial) {};
LIS.begin(WIRE, 0x19); //IIC init
delay(100);
LIS.setOutputDataRate(LIS3DHTR_DATARATE_50HZ);
}
void loop() {
if (!LIS) {
Serial.println("LIS3DHTR didn't connect.");
while (1);
return;
}
//3 axis
Serial.print("x:"); Serial.print(LIS.getAccelerationX()); Serial.print(" ");
Serial.print("y:"); Serial.print(LIS.getAccelerationY()); Serial.print(" ");
Serial.print("z:"); Serial.println(LIS.getAccelerationZ());
delay(500);
}
Análisis del Código
#include "LIS3DHTR.h"
#ifdef SOFTWAREWIRE
#include <SoftwareWire.h>
SoftwareWire myWire(3, 2);
LIS3DHTR<SoftwareWire> LIS; //Software I2C
#define WIRE myWire
#else
#include <Wire.h>
LIS3DHTR<TwoWire> LIS; //Hardware I2C
#define WIRE Wire
#endif
Inicializando el módulo usando I2C por software o I2C por hardware.
while (!Serial) {};
El código se detiene aquí si no abres el monitor serie, así que abre el monitor serie.
LIS.begin(WIRE, 0x19);
LIS.setOutputDataRate(LIS3DHTR_DATARATE_50HZ);
Descripción: Inicializa el acelerómetro.
Sintaxis: LIS.begin(Wire, address).
Descripción: Establece la tasa de datos de salida del acelerómetro.
Sintaxis: LIS.setOutputDataRate(odr_type_t odr).
Inicializa el acelerómetro y establece la tasa de salida a 50Hz.
Serial.print("x:"); Serial.print(LIS.getAccelerationX()); Serial.print(" ");
Serial.print("y:"); Serial.print(LIS.getAccelerationY()); Serial.print(" ");
Serial.print("z:"); Serial.println(LIS.getAccelerationZ());
Descripción:
Funciones a usar para leer el valor del eje X del sensor.
Sintaxis:
LIS.getAccelerationX(). Tipo de retorno: float.
Descripción:
Funciones a usar para leer el valor del eje Y del sensor.
Sintaxis:
LIS.getAccelerationY(). Tipo de retorno: float.
Descripción:
Funciones a usar para leer el valor del eje Z del sensor.
Sintaxis:
LIS.getAccelerationZ(). Tipo de retorno: float.
Imprime los datos de los 3 ejes en el monitor serie.
Efecto de Demostración y Resultado de Impresión Serie:
Las lecturas del acelerómetro de 3 ejes se muestran en el Monitor Serie.
Guía de Conexión
Usa el cable Grove para conectar el Acelerómetro Grove de 3 ejes a la interfaz I2C del Seeeduino Lotus usando un cable Grove (nota: la dirección I2C por defecto es 0x19).
Proyectos Adicionales
Proyecto 1: Lámpara de ritmo dinámico musical
- Descripción del proyecto: En este experimento, haremos que el zumbador reproduzca música agradable y las luces LED parpadeen según la frecuencia y el ritmo de la música.
Componentes Involucrados
- Seeeduino Lotus
- LED Grove
- Zumbador
- Cables Grove (si están separados)

Conexión de Hardware
- Conexión del módulo:
- Conexión por defecto mediante orificio de estampado PCB.
- El Seeeduino se conecta luego a la computadora mediante un cable USB.
Código de Software
- Abre Arduino IDE.
- Copia el siguiente código, haz clic en Verificar para comprobar errores de sintaxis. Verifica que no haya errores y puedes subir el código.
//Music Dynamic Rhythm Lamp
#define NTD0 -1
#define NTD1 294
#define NTD2 330
#define NTD3 350
#define NTD4 393
#define NTD5 441
#define NTD6 495
#define NTD7 556
#define NTDL1 147
#define NTDL2 165
#define NTDL3 175
#define NTDL4 196
#define NTDL5 221
#define NTDL6 248
#define NTDL7 278
#define NTDH1 589
#define NTDH2 661
#define NTDH3 700
#define NTDH4 786
#define NTDH5 882
#define NTDH6 990
#define NTDH7 112
#define WHOLE 1
#define HALF 0.5
#define QUARTER 0.25
#define EIGHTH 0.25
#define SIXTEENTH 0.625
int tune[]=
{
NTD3,NTD3,NTD4,NTD5,
NTD5,NTD4,NTD3,NTD2,
NTD1,NTD1,NTD2,NTD3,
NTD3,NTD2,NTD2,
NTD3,NTD3,NTD4,NTD5,
NTD5,NTD4,NTD3,NTD2,
NTD1,NTD1,NTD2,NTD3,
NTD2,NTD1,NTD1,
NTD2,NTD2,NTD3,NTD1,
NTD2,NTD3,NTD4,NTD3,NTD1,
NTD2,NTD3,NTD4,NTD3,NTD2,
NTD1,NTD2,NTDL5,NTD0,
NTD3,NTD3,NTD4,NTD5,
NTD5,NTD4,NTD3,NTD4,NTD2,
NTD1,NTD1,NTD2,NTD3,
NTD2,NTD1,NTD1
};
float durt[]=
{
1,1,1,1,
1,1,1,1,
1,1,1,1,
1+0.5,0.5,1+1,
1,1,1,1,
1,1,1,1,
1,1,1,1,
1+0.5,0.5,1+1,
1,1,1,1,
1,0.5,0.5,1,1,
1,0.5,0.5,1,1,
1,1,1,1,
1,1,1,1,
1,1,1,0.5,0.5,
1,1,1,1,
1+0.5,0.5,1+1,
};
int length;
int tonepin=5;
int ledp=4;
void setup()
{
pinMode(tonepin,OUTPUT);
pinMode(ledp,OUTPUT);
length=sizeof(tune)/sizeof(tune[0]);
}
void loop()
{
for(int x=0;x<length;x++)
{
tone(tonepin,tune[x]);
digitalWrite(ledp, HIGH);
delay(400*durt[x]);
digitalWrite(ledp, LOW);
delay(100*durt[x]);
noTone(tonepin);
}
delay(4000);
}
Análisis del Código
#define NTD
Aquí está la definición de la frecuencia de la tecla D, que se divide en graves, medios y agudos.
#define WHOLE 1
#define HALF 0.5
#define QUARTER 0.25
#define EIGHTH 0.25
#define SIXTEENTH 0.625
Nota: el ritmo se divide en un tiempo, medio tiempo, 1/4 de tiempo, 1/8 de tiempo, especificamos que el tiempo de una nota de un tiempo es 1; medio tiempo es 0.5; 1/4 de tiempo es 0.25; 1/8 es 0.125.
int tune[]=...
Lista las frecuencias según el espectro.
float durt[]=...
Lista los tiempos según el espectro.
delay(100*durt[x]);
Controla el encendido y apagado de las luces LED respectivamente.
Efecto de Demostración y Resultado de Impresión Serial:
El zumbador reproducirá una melodía mientras el módulo LED parpadeará con la misma frecuencia.
Guía de Conexión Externa
Conecta Grove LED a la interfaz de señal digital D4 del Seeeduino Lotus, conecta el Buzzer a la interfaz de señal digital D5 del Seeeduino Lotus.
Proyecto 2: Hacer una lámpara de escritorio inteligente con inducción de sonido y luz
- Descripción del proyecto: como su nombre indica, este proyecto consiste en hacer una pequeña lámpara controlada por sonido y luz. Necesitamos usar el módulo LED como salida. El sensor de luz y el sensor de sonido se usan para señales de entrada. De esta manera, puedes lograr la función de la lámpara de escritorio inteligente: si el nivel de sonido del entorno está por encima de cierto valor preestablecido, entonces el LED se enciende, o si la intensidad de luz del entorno está por debajo de cierto valor, el módulo LED también se enciende.
Componentes Involucrados
- Seeeduino Lotus
- Grove LED
- Sensor de Luz
- Sensor de Sonido
- Cable Grove (Si se desconecta)

Conexión de Hardware
- Conexión de módulos:
- Conexión predeterminada por orificio de estampado PCB.
- El Seeeduino se conecta luego a la computadora mediante un cable USB.
Código de Software
- Abre Arduino IDE.
- Copia el siguiente código, haz clic en Verificar para comprobar errores de sintaxis. Verifica que no haya errores y puedes subir el código.
//light Induction Desk Lamp
int soundPin = A2; // Analog sound sensor is to be attached to analog
int lightPin = A6; //Analog light sensor is to be attached to analog
int ledPin = 4; // Digital LED is to be attached to digital
void setup() {
pinMode(ledPin, OUTPUT);
pinMode(lightPin, INPUT);
pinMode(soundPin, INPUT);
}
void loop(){
int soundState = analogRead(soundPin); // Read sound sensor’s value
int lightState = analogRead(lightPin); // Read light sensor’s value
// if the sound sensor's value is greater than 500 or the sound sensor's is less than 200, the light will be on.
//Otherwise, the light will be turned off
if (soundState > 500 || lightState < 200) {
digitalWrite(ledPin, HIGH);
delay(500); //You can add the "//" to remove the delay
}else{
digitalWrite(ledPin, LOW);
}
}
Análisis del Código
if (soundState > 500 || lightState < 200) {
...
}
En paréntesis hay una expresión lógica. Tanto && como || se usan comúnmente en expresiones lógicas. El uso común es if (expresión 1 || expresión 2) e if (expresión 1 && expresión 2).
|| representa "o", satisface una de ellas, toda la expresión es verdadera, y satisface la condición del juicio if.
&& significa "y", la declaración en if se ejecuta solo si todas las expresiones en paréntesis son verdaderas.
Efecto de Demostración y Resultado de Impresión Serial:
Si el sonido del entorno es lo suficientemente fuerte o la intensidad de luz es baja, el módulo LED se encenderá con más intensidad.
Guía de Conexión Externa
Conecta el Grove LED a la interfaz de señal digital D4 del Seeeduino Lotus, conecta el Sensor de Luz a la interfaz de señal analógica A1 del Seeeduino Lotus. Conecta el Sensor de Sonido a la interfaz de señal analógica A2 del Seeeduino Lotus usando un cable Grove.
Crea Tus Propios Módulos y Placas
Después de este período de estudio, ya tienes una comprensión sistemática de Arduino y hardware de código abierto, así que ¿por qué no ir más allá e intentar hacer tu propio módulo o placa de desarrollo?
EDA
Para diseñar tu propia placa, necesitarás diseñar los esquemáticos de tu propio módulo, lo cual requiere una herramienta EDA para hacerlo. Aquí se recomienda un software EDA de código abierto.
- KiCAD
KiCad es una suite de software gratuita para automatización de diseño electrónico. Facilita el diseño de esquemáticos para circuitos electrónicos y su conversión a diseños PCB. Cuenta con un entorno integrado para captura de esquemáticos y diseño de layout PCB. Los programas manejan Captura de Esquemáticos y Diseño de Layout PCB con salida Gerber. La suite funciona en Windows, Linux y macOS y está licenciada bajo GNU GPL v3.
- Upverter
Si no quieres trabajar en esquemáticos o layout tú mismo, pero quieres convertir tu prototipo basado en módulos de Seeed en un producto integrado, te recomendamos encarecidamente que pruebes Upverter.
Por favor visita la Guía de Grove Beginner Kit para Arduino Upverter para más información.
Servicios PCB
Después de que hayas terminado con tu diseño, echa un vistazo al servicio Seeed Fusion PCBA, que puede ayudar a traducir tus diseños en un dispositivo funcional real.

Seeed Studio tiene su propia Biblioteca de Partes Abiertas (OPL) que es una colección de más de 10,000 componentes comúnmente usados específicamente obtenidos para el Servicio Seeed Fusion PCBA. Para acelerar el proceso de diseño PCB, Seeed está construyendo las bibliotecas de componentes para KiCad y Eagle. Cuando todos los componentes se obtienen de la OPL PCBA de Seeed y se usan con el servicio de Ensamblaje PCB Seeed Fusion (PCBA), todo el tiempo de producción PCBA puede reducirse de 20 días laborables a solo 7 días.
FAQ
1. ¿Cómo remover los módulos electrónicos individuales para su uso?

Mirando de cerca el Grove Beginner Kit Para Arduino verás que hay 3 pequeños orificios entre cada módulo individual y la placa base. Todo lo que necesitas hacer es cortar la placa base PCB alrededor del módulo desde los pequeños orificios usando un par de alicates diagonales.

Nota: corta cuidadosamente a lo largo de la periferia del pequeño orificio, no cortes hacia el pequeño orificio (para prevenir cortocircuito del cableado interno y así dañar el módulo); si accidentalmente cortas hacia el pequeño orificio, por favor usa un cuchillo para limpiar el pequeño orificio para prevenir cortocircuito

Visor de Esquemáticos en Línea
Recursos
-
Archivos de Diseño Esquemático
-
Bibliotecas de Módulos en Github:
-
Recursos del Grove Beginner Kit Para Arduino en uno [20200401] (7z)
-
Curso de Programación Gráfica Codecraft del Grove Beginner Kit Para Arduino web v8
Más Aprendizaje
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarle diferentes tipos de soporte para asegurar que su experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para satisfacer diferentes preferencias y necesidades.