Grove - Sensor de Color I2C

Este módulo está basado en el sensor de color TCS3414CS con salida digital I2C. Basado en la matriz de 8*2 de fotodiodos filtrados y convertidores analógico-digitales de 16 bits, puedes medir la cromaticidad del color de la luz ambiental o el color de los objetos. De los 16 fotodiodos, 4 tienen filtros rojos, 4 tienen filtros verdes, 4 tienen filtros azules y 4 no tienen filtro (transparente). Con el pin de entrada de sincronización, una fuente de luz pulsada externa puede proporcionar un control de conversión síncrono preciso.
Ten en cuenta que la última versión V2.0 ha reemplazado el IC con TCS3472 y la biblioteca antigua también ha sido actualizada. Si estás usando la versión V2.0, por favor usa la nueva biblioteca.
Características
- Interfaz compatible con Grove
- Salida digital de 16 bits con I2C
- Entrada SYNC sincroniza el ciclo de integración con fuentes de luz moduladas
- Rango de temperatura de funcionamiento -40°C a 85°C
- Función de interrupción programable con configuraciones de umbral superior e inferior definidas por el usuario
- Cumple con RoHS
Para más detalles sobre los módulos Grove, consulta Sistema Grove
Especificaciones
| Parámetro | Valor/Rango |
|---|---|
| Tamaño PCB | 2.0 cm * 4.0 cm |
| Interfaz | Conector de pines de 2.0mm |
| VCC | 3.3 - 6.0 V |
| Velocidad I2C | 400 kHz |
Plataformas Compatibles
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
Las plataformas mencionadas anteriormente como compatibles son una indicación de la compatibilidad de software o teórica del módulo. Solo proporcionamos biblioteca de software o ejemplos de código para la plataforma Arduino en la mayoría de los casos. No es posible proporcionar biblioteca de software / código de demostración para todas las plataformas MCU posibles. Por lo tanto, los usuarios tienen que escribir su propia biblioteca de software.
Primeros Pasos
Los siguientes documentos ayudan al usuario a comenzar con Grove.
Conexiones de Hardware
Los productos Grove tienen un ecosistema y todos tienen el mismo conector que se puede conectar al Grove Base Shield. Conecta este módulo al puerto I2C del Base Shield. Sin embargo, también puedes conectar Grove - Sensor de Color I2C a Arduino sin Base Shield usando cables jumper.
| Arduino UNO | Grove - Sensor de Color I2C |
|---|---|
| 5V | VCC |
| GND | GND |
| SDA | SDA |
| SCL | SCL |
Instalación de Software
Descarga Arduino e instala el controlador de Arduino
Primeros Pasos con Seeeduino/Arduino
Demostraciones
Este módulo se puede usar para detectar el color de la fuente de luz o el color de los objetos. Cuando se usa para detectar el color de la fuente de luz, el interruptor LED debe estar apagado, y la fuente de luz debe iluminar el sensor directamente. Cuando se usa para detectar el color de las cosas, el LED debe estar encendido y debes poner el objeto en la parte superior de la carcasa muy cerca. La teoría de detectar el color de los objetos es la Teoría de Detección Reflectiva. Como en la imagen de abajo.

Biblioteca del Sensor de Color
Hemos creado una biblioteca para ayudarte a comenzar a jugar rápidamente con el Seeeduino/Arduino, en esta sección te mostraremos cómo configurar la biblioteca.
Configuración
- Descarga el código de la biblioteca como archivo zip desde la página de github Grove_I2C_Color_Sensor. Si estás usando la última versión V2.0 (IC es TCS3472), por favor usa esta nueva biblioteca
- Descomprime el archivo descargado en tu …/arduino/libraries.
- Renombra la carpeta descomprimida "Color_Sensor"
- Inicia el IDE de Arduino (o reinicia si está abierto).
Descripción de la función
Esta es la función más importante/útil en la biblioteca, te invitamos a mirar los archivos .h y .cpp tú mismo para ver todas las funciones disponibles.
Leer datos RGB a través de la función de biblioteca
readRGB(int *red, int *green, int *blue)
- red: La dirección de variable para guardar R.
- green: La dirección de variable para guardar G.
- blue: La dirección de variable para guardar B.
void loop()
{
int red, green, blue;
GroveColorSensor colorSensor;
colorSensor.ledStatus = 1; // When turn on the color sensor LED, ledStatus = 1; When turn off the color sensor LED, ledStatus = 0.
while(1)
{
colorSensor.readRGB(&red, &green, &blue); //Read RGB values to variables.
delay(300);
Serial.print("The RGB value are: RGB( ");
Serial.print(red,DEC);
Serial.print(", ");
Serial.print(green,DEC);
Serial.print(", ");
Serial.print(blue,DEC);
Serial.println(" )");
colorSensor.clearInterrupt();
}
}
Ejemplos/Aplicaciones del Sensor de Color
Este ejemplo muestra cómo usar las características de Grove - Sensor de Color I2C y mostrar el color detectado con un LED RGB Encadenable Grove.
Si no has descargado la biblioteca Grove-Chainable RGB LED a tu IDE de Arduino antes, por favor descarga y configura la biblioteca primero.
- Abre File->Examples->Color_Sensor->example->ColorSensorWithRGB-LED sketch para un ejemplo completo, o copia y pega el código de abajo en un nuevo sketch de Arduino.
Descripción: Este ejemplo puede medir la cromaticidad del color de la luz ambiental o el color de los objetos, y a través del LED RGB Encadenable Grove, mostrar el color detectado.
También puedes usar otros módulos de visualización para mostrar el color detectado por Grove - Sensor de Color I2C.
#include <Wire.h>
#include <GroveColorSensor.h>
#include <ChainableLED.h>
#define CLK_PIN 7
#define DATA_PIN 8
#define NUM_LEDS 1 //The number of Chainable RGB LED
ChainableLED leds(CLK_PIN, DATA_PIN, NUM_LEDS);
void setup()
{
Serial.begin(9600);
Wire.begin();
}
void loop()
{
int red, green, blue;
GroveColorSensor colorSensor;
colorSensor.ledStatus = 1; // When turn on the color sensor LED, ledStatus = 1; When turn off the color sensor LED, ledStatus = 0.
while(1)
{
colorSensor.readRGB(&red, &green, &blue); //Read RGB values to variables.
delay(300);
Serial.print("The RGB value are: RGB( ");
Serial.print(red,DEC);
Serial.print(", ");
Serial.print(green,DEC);
Serial.print(", ");
Serial.print(blue,DEC);
Serial.println(" )");
colorSensor.clearInterrupt();
for(int i = 0; i<NUM_LEDS; i++)
{
leds.setColorRGB(i, red, green, blue);
}
}
}
- Sube el código a la placa de desarrollo.
- Entonces Grove_-_Chainable_RGB_LED mostraría el color que es detectado.
Jugar con Raspberry Pi
Hardware
- Paso 1. Cosas usadas en este proyecto:
| Raspberry pi | Grove Base Hat para RasPi | Grove-I2C_Color_Sensor |
|---|---|---|
|
|
|
| Obtener UNO Ahora | Obtener UNO Ahora | Obtener UNO Ahora |


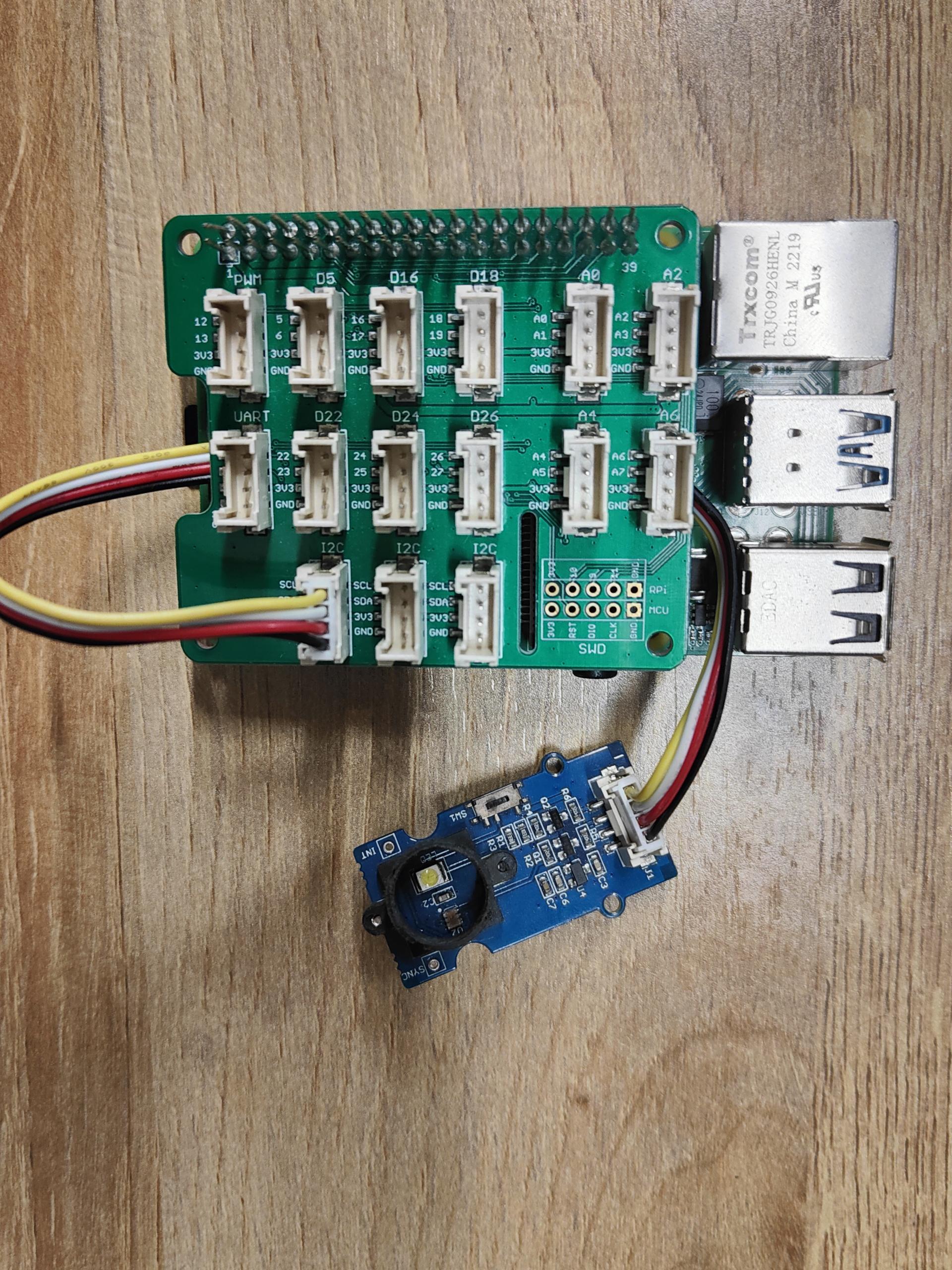
- Paso 2. Conecta el Grove Base Hat al Raspberry.
- Paso 3. Conecta el Grove-I2C_Color al puerto I2C del Base Hat.
- Paso 4. Conecta el Raspberry Pi a la PC a través del cable USB.
Software
Si estás usando Raspberry Pi con Raspberrypi OS >= Bullseye, tienes que usar esta línea de comandos solo con Python3.
- Paso 1. Sigue Setting Software para configurar el entorno de desarrollo.
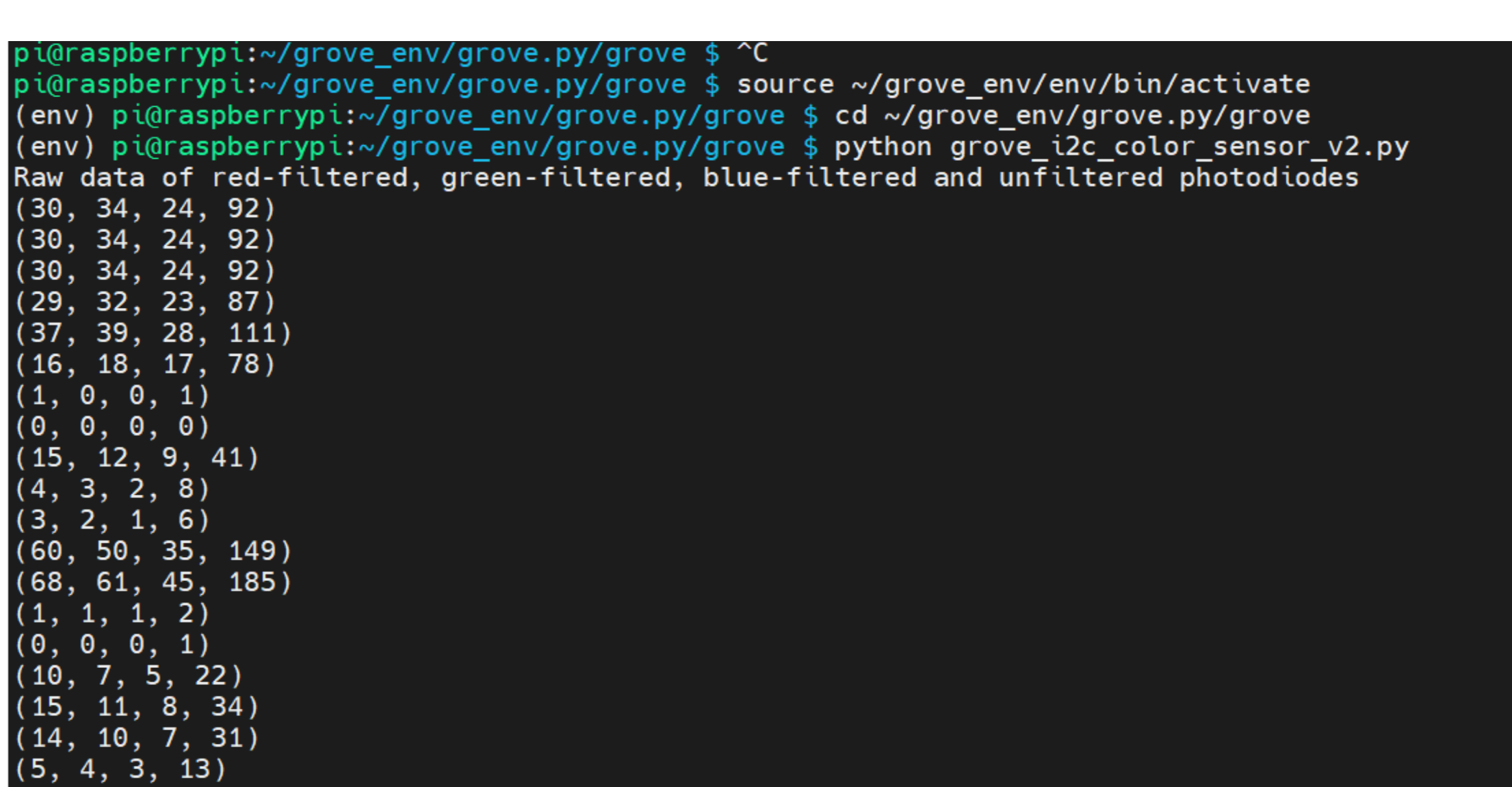
- Paso 2. Entra al entorno virtual relevante.
source ~/grove_env/env/bin/activate
cd ~/grove_env/grove.py/grove
-
Paso 3. Ejecuta el siguiente comando para ejecutar el código.
-
Lo siguiente es para verificar el código grove_i2c_color_sensor_v2.py.
less grove_i2c_color_sensor_v2.py
import time
from grove.i2c import Bus
_CMD = 0x80
_AUTO = 0x20
_ENABLE = 0x00
_ATIME = 0x01
_WTIME = 0x03
_AILT = 0x04
_AIHT = 0x06
_PERS = 0x0C
_CONFIG = 0x0D
_CONTROL = 0x0F
_ID = 0x12
_STATUS = 0x13
_CDATA = 0x14
_RDATA = 0x16
_GDATA = 0x18
_BDATA = 0x1A
_AIEN = 0x10
_WEN = 0x08
_AEN = 0x02
_PON = 0x01
_GAINS = (1, 4, 16, 60)
class GroveI2cColorSensorV2:
"""Driver for Grove I2C Color Sensor (TCS34725)"""
def __init__(self, bus=1, address=0x29):
self.address = address
self.bus = Bus(bus)
self.awake = False
if self.id not in (0x44, 0x4D):
raise ValueError('Not find a Grove I2C Color Sensor V2')
self.set_integration_time(24)
self.set_gain(4)
def wakeup(self):
enable = self._read_byte(_ENABLE)
self._write_byte(_ENABLE, enable | _PON | _AEN)
time.sleep(0.0024)
self.awake = True
def sleep(self):
enable = self._read_byte(_ENABLE)
self._write_byte(_ENABLE, enable & ~_PON)
self.awake = False
def is_awake(self):
return self._read_byte(_ENABLE) & _PON
def set_wait_time(self, t):
pass
@property
def id(self):
return self._read_byte(_ID)
@property
def integration_time(self):
steps = 256 - self._read_byte(_ATIME)
return steps * 2.4
def set_integration_time(self, t):
"""Set the integration time of the sensor"""
if t < 2.4:
t = 2.4
elif t > 614.4:
t = 614.4
steps = int(t / 2.4)
self._integration_time = steps * 2.4
self._write_byte(_ATIME, 256 - steps)
@property
def gain(self):
"""The gain control. Should be 1, 4, 16, or 60.
"""
return _GAINS[self._read_byte(_CONTROL)]
def set_gain(self, gain):
if gain in _GAINS:
self._write_byte(_CONTROL, _GAINS.index(gain))
@property
def raw(self):
"""Read RGBC registers
return 16 bits red, green, blue and clear data
"""
if not self.awake:
self.wakeup()
while not self._valid():
time.sleep(0.0024)
data = tuple(self._read_word(reg) for reg in (_RDATA, _GDATA, _BDATA, _CDATA))
return data
@property
def rgb(self):
"""Read the RGB color detected by the sensor. Returns a 3-tuple of
red, green, blue component values as bytes (0-255).
"""
r, g, b, clear = self.raw
if clear:
r = int(255 * r / clear)
g = int(255 * g / clear)
b = int(255 * b / clear)
else:
r, g, b = 0, 0, 0
return r, g, b
def _valid(self):
"""Check if RGBC is valid"""
return self._read_byte(_STATUS) & 0x01
def _read_byte(self, address):
command = _CMD | address
return self.bus.read_byte_data(self.address, command)
def _read_word(self, address):
command = _CMD | _AUTO | address
return self.bus.read_word_data(self.address, command)
def _write_byte(self, address, data):
command = _CMD | address
self.bus.write_byte_data(self.address, command, data)
def _write_word(self, address, data):
command = _CMD | _AUTO | address
data = [(data >> 8) & 0xFF, data & 0xFF]
self.bus.write_i2c_block_data(self.address, command, data)
Grove = GroveI2cColorSensorV2
def main():
sensor = GroveI2cColorSensorV2()
print('Raw data of red-filtered, green-filtered, blue-filtered and unfiltered photodiodes')
while True:
# r, g, b = sensor.rgb
r, g, b, clear = sensor.raw
print((r, g, b, clear))
time.sleep(1.0)
if __name__ == '__main__':
main()
- Ejecuta este código
python grove_i2c_color_sensor_v2.py
Si todo va bien, verás el siguiente fenómeno.😄
Otra Referencia
Este módulo está basado en el sensor de color TCS3414CS. El sensor de color digital TCS3414CS devuelve datos de cuatro canales: rojo(R), verde(G), azul(B) y claro(C)(sin filtrar). La respuesta de los canales rojo, verde y azul (RGB) puede usarse para determinar las coordenadas de cromaticidad (x, y) de una fuente particular. Estos estándares están establecidos por la Commission Internationale de l'Eclairage (CIE). La CIE es la principal organización internacional relacionada con el color y la medición del color. Para adquirir el color de un objeto dado usando TCS3414CS, primero debemos mapear la respuesta del sensor (RGB) a los valores de triestímulo CIE (XYZ). Luego es necesario calcular las coordenadas de cromaticidad (x, y).
Resumen del Proceso de Cálculo de Cromaticidad
Las ecuaciones para hacer la transformación:

Ecuaciones de Transformación
- Cuando obtenemos las coordenadas (x, y), por favor consulta la siguiente figura para obtener el color recomendado.

Preguntas Frecuentes
P1: ¿Cómo entender los comandos? Por ejemplo, REG_GREEN_LOW = 0xD0
R1: Desde la imagen adjunta, puedes ver qué hay en el comando. Cuando uses el comando de protocolo de byte, debe ser como 0x80+ADDRESS. Por ejemplo, REG_TIMING( 01h ) = 0x81 Para lectura de byte y bloque, el comando debe ser 0xC0+ADDRESS, REG_GREEN_LOW( 10h ) = 0xD0.

Archivo Eagle del Grove-I2C Color Sensor V1.2
Archivo Eagle del Grove-I2C Color Sensor V2.0
Recursos
- [Librería]Librería para Grove - I2C Color Sensor V1.2
- [Librería]Librería para Grove - I2C Color Sensor V2.0
- [Eagle]Archivo Eagle del Grove-I2C Color Sensor V1.2
- [Eagle]Archivo Eagle del Grove-I2C Color Sensor V2.0
- [Hoja de Datos]Hoja de Datos TCS3414-A
- [Hoja de Datos]Hoja de Datos TCS3472
Soporte Técnico y Discusión del Producto
Actualizable a Sensores Industriales
Con el controlador S2110 y el registrador de datos S2100 de SenseCAP, puedes convertir fácilmente el Grove en un sensor LoRaWAN®. Seeed no solo te ayuda con la creación de prototipos, sino que también te ofrece la posibilidad de expandir tu proyecto con la serie SenseCAP de sensores industriales robustos.
La carcasa IP66, configuración Bluetooth, compatibilidad con la red global LoRaWAN®, batería integrada de 19 Ah y el potente soporte de la APP hacen que el SenseCAP S210x sea la mejor opción para aplicaciones industriales. La serie incluye sensores para humedad del suelo, temperatura y humedad del aire, intensidad de luz, CO2, EC y una estación meteorológica 8 en 1. Prueba el último SenseCAP S210x para tu próximo proyecto industrial exitoso.
