Grove - Controlador de Motor I2C V1.3

El Grove - Controlador de Motor I2C V1.3 (versión más reciente) puede controlar directamente un Motor Paso a Paso o Motor DC. Su núcleo es un chip controlador de puente H de doble canal (L298N) que puede manejar corriente hasta 2A por canal, controlado por un Atmel ATmega8L que maneja la comunicación I2C con plataformas como Arduino. Ambos motores pueden ser controlados simultáneamente mientras se configuran a diferente velocidad y dirección. Puede alimentar dos motores DC con escobillas o un motor paso a paso de dos fases de 4 cables. Requiere una fuente de alimentación de 6V a 15V para alimentar el motor y tiene un regulador de voltaje de 5V integrado que puede alimentar el bus I2C y el Arduino (seleccionable por jumper). Todas las líneas del controlador están protegidas por diodos contra la FEM inversa.
En contraste con el Grove - controlador de motor I2C V1.2, el V1.3 permite a los usuarios controlar el motor paso a paso más fácilmente. Ya no necesitas controlar los steppers todo el tiempo, simplemente envía un comando al controlador de motor I2C V1.3 para manejar un motor paso a paso, y actuará según tu comando, lo que ahorrará recursos de tu Arduino y simplificará tu código.

Versión
| Revisión | Descripciones | Lanzamiento |
|---|---|---|
| v1.0 | Lanzamiento público inicial | 17 de mayo, 2012 |
| v1.2 | Modificar la dirección I2C establecida por hardware | 2 de julio, 2012 |
| v1.3 | Modificar el firmware para soportar Stepper fuera de línea | 18 de febrero, 2013 |
Características
- Compatible con Grove
- Interfaz I2C
- Velocidad del motor y dirección de rotación ajustables
- Dirección esclava cambiable por hardware
Más detalles sobre los módulos Grove consulte Sistema Grove
Especificaciones
Elemento | Mín | Típico | Máx | Unidad |
|---|---|---|---|---|
Voltaje de Trabajo | 6 | 15 | VDC | |
Corriente Máxima de Salida por canal | 0.5 | A | ||
Corriente Total Máxima | 1.0 | A | ||
Voltaje de entrada/salida en bus I2C | 5 | V | ||
Protocolo de comunicación | I2C | / | ||
Si quieres usar múltiples dispositivos I2C, por favor consulta Software I2C.
Plataformas Soportadas
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
Las plataformas mencionadas anteriormente como compatibles son una indicación de la compatibilidad de software o teórica del módulo. Solo proporcionamos biblioteca de software o ejemplos de código para la plataforma Arduino en la mayoría de los casos. No es posible proporcionar biblioteca de software / código de demostración para todas las plataformas MCU posibles. Por lo tanto, los usuarios tienen que escribir su propia biblioteca de software.
Descripción General del Hardware
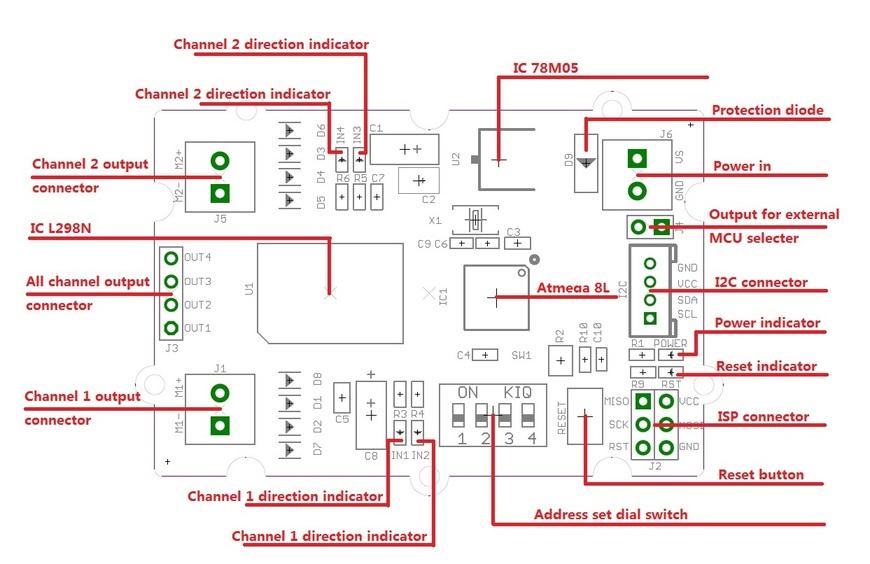
IC 78M05: Regulador de voltaje de 5V
IC L298: Controlador de puente completo dual
IC ATmega8: Controla la rotación del motor.
Nota
El voltaje de entrada en los terminales de tornillo se regula a 5V y se conecta a I2C +5V a través de un puente (J4). Retire el puente si se utilizan tanto alimentación externa a través de los terminales de tornillo como alimentación a través del conector I2C. Use el puente si se debe suministrar 5V al bus I2C.Ideas de Aplicación
- Robots
- Coches RC caseros
- Ventiladores de carcasa
- Iluminación LED de alta potencia
Precaución
¡La placa se calentará mucho mientras opere por encima de 1 Amperio. ¡Mantenga sus manos alejadas!Primeros Pasos
Si esta es la primera vez que trabajas con Arduino, recomendamos firmemente que veas Primeros Pasos con Arduino antes de comenzar.
Jugar con Arduino
Demostración
El Controlador de Motor I2C puede controlar motores basado en el chip L298. El L298 no es solo un controlador de motor dual, es un puente H dual. Un puente H es básicamente una configuración específica de transistores que te permite cambiar la dirección de la corriente. Conectarlo a un motor significa que puedes hacerlo girar en ambas direcciones; y con entrada PWM, puedes usar tu Arduino para hacerlos girar a cualquier velocidad. Debido a que el L298 tiene 2 puentes H, puedes hacer que un robot gire haciendo girar cada rueda en diferentes direcciones, y por supuesto ir hacia adelante y hacia atrás.
Hardware
- Paso 1. Prepara los siguientes elementos:
| Seeeduino V4.2 | Base Shield | Grove - I2C Motor Driver V1.3 |
|---|---|---|
 |  |  |
| Obtener Uno Ahora | Obtener Uno Ahora | Obtener Uno Ahora |
-
Paso 2. Configurar la dirección del Controlador de Motor I2C
-
Configurar la dirección mediante el interruptor de dial es una nueva función añadida al nuevo Controlador de Motor I2C.

- Luego mantén la configuración de dirección en el programa igual que la configuración de dirección en el controlador de motor I2C. La configuración de dirección predeterminada en el programa es 0x0f.
- Paso 3. Conecta Grove - I2C Motor Driver V1.3 al puerto I2C del Grove-Base Shield.
- Paso 4. Conecta Grove - Base Shield al Seeeduino.
- Paso 5. Conecta Seeeduino a la PC mediante un cable USB.
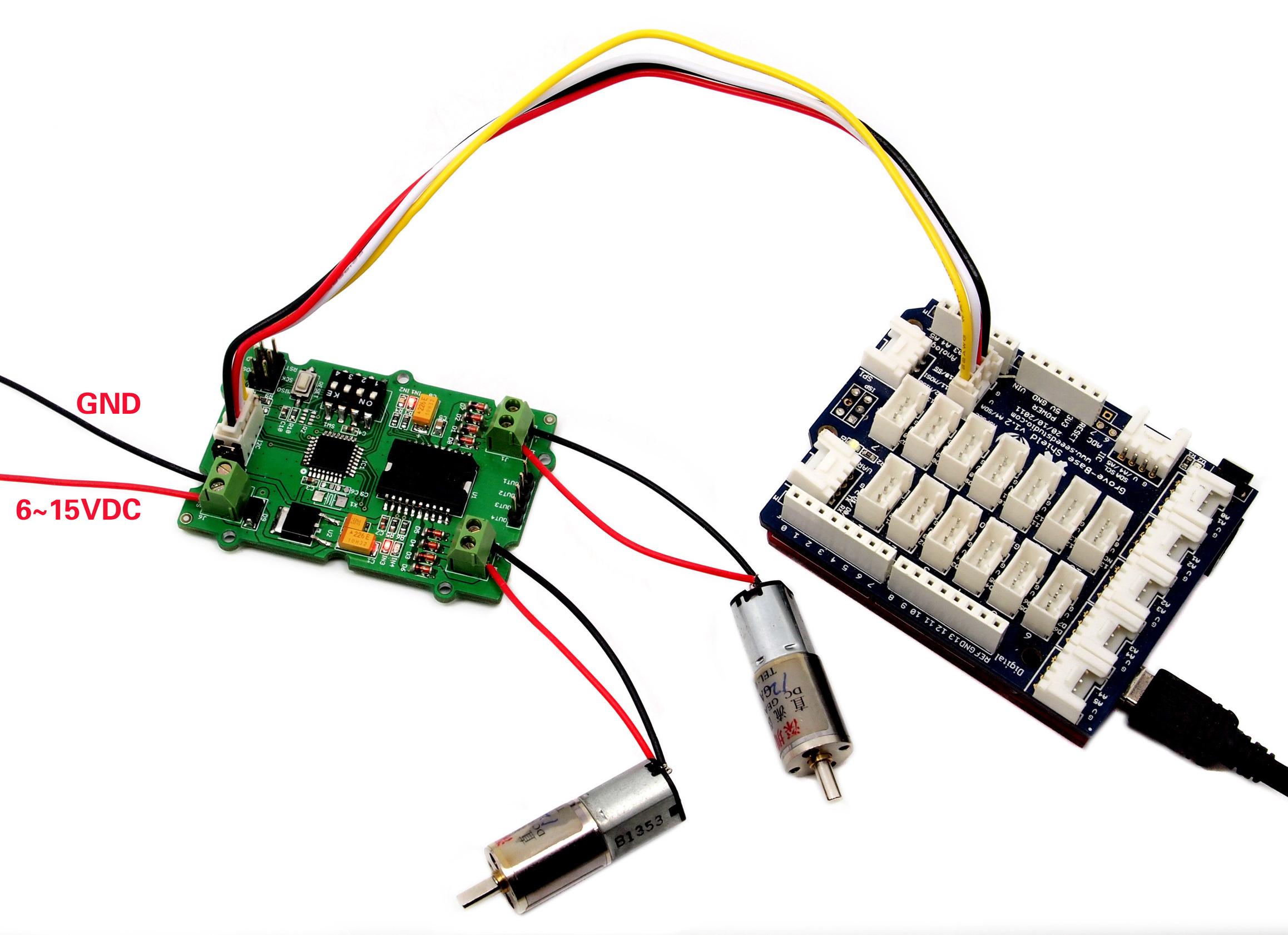
Si no tenemos Grove Base Shield, también podemos conectar directamente Grove - I2C Motor Driver V1.3 al Seeeduino como se muestra a continuación.
| Seeeduino | Grove - I2C Motor Driver V1.3 |
|---|---|
| 5V | Rojo |
| GND | Negro |
| SDA | Blanco |
| SCL | Amarillo |
Software
- Paso 1. Descarga la Librería Grove_I2C_Motor_Driver_v1_3 desde Github.
- Paso 2. Consulta Cómo instalar librería para instalar la librería para Arduino.
- Paso 3. Copia el código en Arduino IDE y súbelo. Si no sabes cómo subir el código, por favor revisa cómo subir código.
// default I2C address is 0x0f
#define I2C_ADDRESS 0x0f
void setup()
{
Motor.begin(I2C_ADDRESS);
}
Nota
Lo primero que hay que tener en cuenta es que necesitas una fuente de alimentación externa para tus motores DC. El pin de 5V del Arduino no puede proporcionar suficiente energía para mover 2 motores, puedes dañar tu Arduino si lo haces.- Hay 2 funciones para controlar motores DC:
// Set the speed of a motor, speed is equal to duty cycle here
void speed(unsigned char motor_id, int _speed);
// Stop one motor
void stop(unsigned char motor_id);
Con la función speed(), puedes hacer funcionar un motor a la velocidad que desees.
-
motor_id representa qué motor usar. Puedes completar MOTOR1 o MOTOR2.
-
_speed representa la velocidad que estableces para el motor. Puedes completar -100~100 aquí. Cuando _speed>0, el motor DC gira en sentido horario, mientras que _speed<0, el motor DC gira en sentido antihorario. Y cuanto mayor sea el valor absoluto de _speed, más rápida será la velocidad del motor DC.
Con la función stop(), puedes detener un motor DC en funcionamiento.
- motor_id representa qué motor usar. Puedes completar MOTOR1 o MOTOR2.
Controlar un Motor Paso a Paso
Tomando como ejemplo el Motor Paso a Paso 24BYJ48, la instalación del hardware se muestra a continuación:
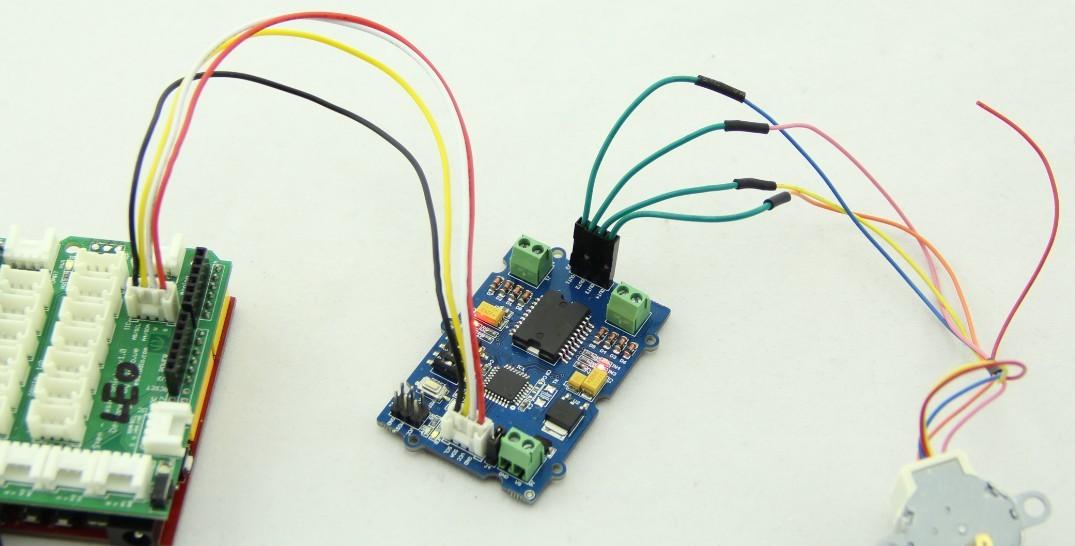
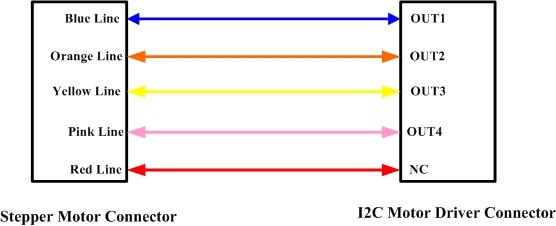
La conexión entre el Motor Paso a Paso 24BYJ48 y el Controlador de Motor I2C se muestra a continuación:
- Proporcionamos una función para controlar un motor paso a paso.
// Drive a stepper motor
void StepperRun(int _step);
- _step representa los pasos que configuras para que el motor paso a paso funcione. Puedes llenar -1024~1024. Cuando _step>0, el motor paso a paso gira en sentido horario, mientras que _step<0, el motor paso a paso gira en sentido antihorario. Cuando _step es 512/-512, el motor paso a paso dará una vuelta completa y si _step es 1024/-1024, el motor paso a paso dará 2 vueltas. El motor paso a paso se detendrá automáticamente después de completar sus pasos.
Jugar con Codecraft
Hardware
Paso 1. Usando un cable Grove conecta Grove - I2C Motor Driver al puerto I2C de Seeeduino. Si estás usando Arduino, por favor aprovecha un Base Shield.
Paso 2. Conecta Seeedino/Arduino a tu PC mediante un cable USB.
Software
Paso 1. Abre Codecraft, añade soporte para Arduino, y arrastra un procedimiento principal al área de trabajo.
Si esta es tu primera vez usando Codecraft, consulta también Guía para Codecraft usando Arduino.
Paso 2. Arrastra bloques como en la imagen de abajo o abre el archivo cdc que se puede descargar al final de esta página.

Sube el programa a tu Arduino/Seeeduino.
Cuando el código termine de subirse, verás que los motores DC que están conectados al Motor Driver están funcionando.
Visor de Esquemático en Línea
Recursos
-
[PDF] Grove - I2C Motor Driver V1.3 Esquemático en Formato PDF
-
[Library] Grove - I2C Motor Driver V1.3 Biblioteca
-
[Datasheet] Hoja de Datos L298
-
[Datasheet] Hoja de Datos 78M05
-
[Codecraft] Archivo CDC
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarte diferentes tipos de soporte para asegurar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para satisfacer diferentes preferencias y necesidades.