Grove - Line Finder V1.1
Grove-Line finder está diseñado para robots seguidores de línea. Tiene un LED emisor de IR y un fototransistor sensible a IR. Puede generar una señal digital a un microcontrolador para que el robot pueda seguir una línea negra sobre fondo blanco, o viceversa.

Versión
| Versión del Producto | Cambios | Fecha de Lanzamiento |
|---|---|---|
| Grove-Line Finder V1.0 | Inicial | 29 Ene 2010 |
| Grove-Line Finder V1.1 | Agregar puntos de prueba | 28 Dic 2015 |
Especificación
| Parámetro | Valor/Rango |
|---|---|
| Fuente de alimentación | 5 |
| Modo de salida digital | TTL (Alto cuando se detecta negro, Bajo cuando se detecta blanco) |
| Conector | Interfaz Grove abrochada de 4 pines |
| Dimensión | 20mm*20mm |
| ROHS | Sí |
| Diodo fotorreflectivo | RS-06WD |
| Comparador | MV358 |
!!!Tip Más detalles sobre los módulos Grove consulte Sistema Grove
Plataforma Soportada
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
Las plataformas mencionadas anteriormente como compatibles son una indicación de la compatibilidad de software o teórica del módulo. Solo proporcionamos biblioteca de software o ejemplos de código para la plataforma Arduino en la mayoría de los casos. No es posible proporcionar biblioteca de software / código de demostración para todas las plataformas MCU posibles. Por lo tanto, los usuarios tienen que escribir su propia biblioteca de software.
Primeros Pasos
Jugar Con Arduino
Hardware
- Paso 1. Prepara las siguientes cosas:
| Seeeduino V4.2 | Base Shield | Grove - Button |
|---|---|---|
 |  |  |
| Obtener Uno Ahora | Obtener Uno Ahora | Obtener Uno Ahora |
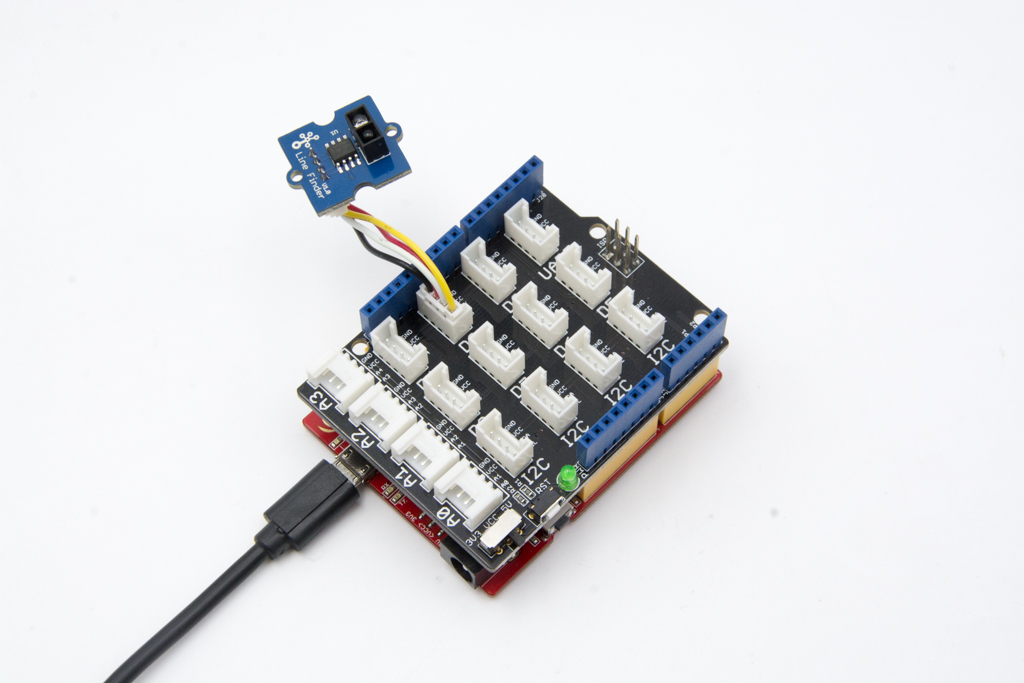
- Paso 2. Conecta el detector de líneas Grove al puerto D3 del Grove-Base Shield.
- Paso 3. Conecta el Grove - Base Shield al Seeeduino.
- Paso 4. Conecta el Seeeduino a la PC a través de un cable USB.
Si no tenemos el Grove Base Shield, también podemos conectar directamente el detector de líneas Grove al Seeeduino como se muestra a continuación.
| Seeeduino | Detector de líneas Grove |
|---|---|
| 5V | Rojo |
| GND | Negro |
| Sin conexión | Blanco |
| D3 | Amarillo |
Software
- Paso 1. Copia el código en el IDE de Arduino y súbelo.
//------------------------------------------------------------
//Name: Line finder digital mode
//Function: detect black line or white line
//Parameter: When digital signal is HIGH, black line
// When digital signal is LOW, white line
//-------------------------------------------------------------
int signalPin = 3; // connected to digital pin 3
void setup() {
pinMode(signalPin, INPUT); // initialize the digital pin as an output:
Serial.begin(9600); // initialize serial communications at 9600 bps:
}
// the loop() method runs over and over again,
// as long as the Arduino has power
void loop()
{
if(HIGH == digitalRead(signalPin))
Serial.println("black");
else Serial.println("white"); // display the color
delay(1000); // wait for a second
}
- Paso 2. Abra el puerto serie y veremos "black" cuando pongamos el sensor encima de líneas negras y "white" cuando esté en área blanca.
white
white
white
black
black
black
black
black
Jugar con Codecraft
Hardware
Paso 1. Conecta un Grove - Line Finder al puerto D3 de un Base Shield.
Paso 2. Conecta el Base Shield a tu Seeeduino/Arduino.
Paso 3. Conecta el Seeeduino/Arduino a tu PC mediante un cable USB.
Software
Paso 1. Abre Codecraft, añade soporte para Arduino, y arrastra un procedimiento principal al área de trabajo.
Si esta es tu primera vez usando Codecraft, consulta también Guía para Codecraft usando Arduino.
Paso 2. Arrastra bloques como en la imagen de abajo o abre el archivo cdc que se puede descargar al final de esta página.
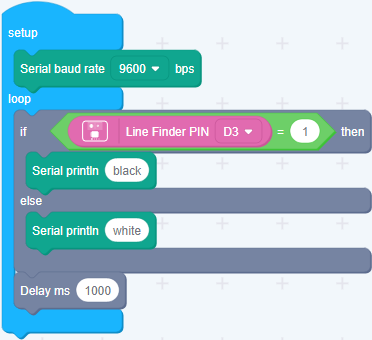
Sube el programa a tu Arduino/Seeeduino.
Cuando el código termine de subirse, verás línea encontrada o no en el Monitor Serie.
Jugar Con Raspberry Pi
Hardware
- Paso 1. Prepara las siguientes cosas:
| Raspberry pi | GrovePi_Plus | Grove - Line Finder |
|---|---|---|
 |  | |
| Consigue UNO Ahora | Consigue UNO Ahora | Consigue UNO Ahora |
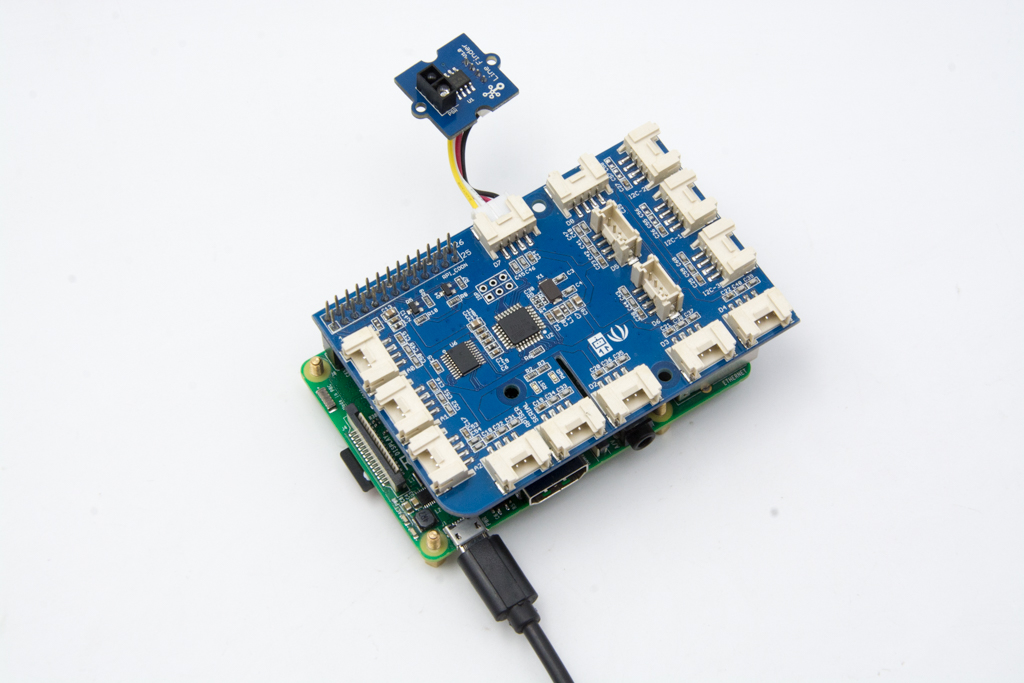
- Paso 2. Conecta el GrovePi_Plus al Raspberry.
- Paso 3. Conecta el Grove-Line Finder al puerto D7 del GrovePi_Plus.
- Paso 4. Conecta el Raspberry a la PC a través del cable USB.
Software
- Paso 1. Sigue Setting Software para configurar el entorno de desarrollo.
- Paso 2. Clona el repositorio de Github con Git.
cd ~
git clone https://github.com/DexterInd/GrovePi.git
- Paso 3. Ejecuta los siguientes comandos.
cd ~/GrovePi/Software/Python
python grove_line_finder.py
Aquí está el código de grove_line_finder.py.
import time
import grovepi
# Connect the Grove Line Finder to digital port D7
# SIG,NC,VCC,GND
line_finder = 7
grovepi.pinMode(line_finder,"INPUT")
while True:
try:
# Return HIGH when black line is detected, and LOW when white line is detected
if grovepi.digitalRead(line_finder) == 1:
print ("black line detected")
else:
print ("white line detected")
time.sleep(.5)
except IOError:
print ("Error")
- Paso 4. Veremos "black line detected" cuando el sensor esté encima de una línea negra.
pi@raspberrypi:~/GrovePi/Software/Python $ python grove_line_finder.py
black line detected
black line detected
white line detected
white line detected
Grove-Line Finder Esquemático V1.0
Grove-Line Finder Esquemático V1.1
Recursos
- [Eagle&PDF] Grove-Line Finder Esquemático V1.0
- [Eagle&PDF] Grove-Line Finder Esquemático V1.1
- [Hoja de datos] LMV358.PDF
- [Codecraft] Archivo CDC
Soporte Técnico y Discusión del Producto
Actualizable a Sensores Industriales
Con el controlador S2110 y el registrador de datos S2100 de SenseCAP, puedes convertir fácilmente el Grove en un sensor LoRaWAN®. Seeed no solo te ayuda con el prototipado, sino que también te ofrece la posibilidad de expandir tu proyecto con la serie SenseCAP de sensores industriales robustos.
La carcasa IP66, configuración Bluetooth, compatibilidad con la red global LoRaWAN®, batería integrada de 19 Ah y el potente soporte de la APP hacen del SenseCAP S210x la mejor opción para aplicaciones industriales. La serie incluye sensores para humedad del suelo, temperatura y humedad del aire, intensidad de luz, CO2, EC y una estación meteorológica 8 en 1. Prueba el último SenseCAP S210x para tu próximo proyecto industrial exitoso.
