Grove Shield para XIAO con chip de gestión de batería

Descripción general
Seeed Studio Grove Base para XIAO es una placa de extensión Grove plug-and-play para Seeed Studio XIAO. Con el chip de gestión de batería integrado y la almohadilla de conexión de la batería, puedes alimentar fácilmente tu Seeed Studio XIAO con una batería de litio y recargarla. Los 8 conectores Grove integrados incluyen dos Grove I2C y uno UART. Actúa como un puente entre Seeed Studio XIAO y el sistema Grove de Seeed. La almohadilla de conexión Flash SPI te permite añadir memoria Flash a Seeed Studio XIAO para ampliar su espacio de memoria, proporcionando a Seeed Studio XIAO más posibilidades.
Con el chip de gestión de batería integrado y la almohadilla de conexión de la batería, puedes alimentar fácilmente tu Seeed Studio XIAO con una batería de litio de 3,7 V y recargarla, haciendo que tus proyectos, especialmente los wearables, sean más flexibles y portátiles. Incluso puedes partir la placa a través de las perforaciones de la PCB integradas según tus necesidades reales del proyecto (solo 25*39 mm de dimensión después de partirla), haciéndola aún más pequeña y reduciendo también el peso de 13 g a 10 g.
Como placa de extensión, la Seeed Studio Grove Base para XIAO también saca todos los 14 pines de Seeed Studio XIAO, y su interruptor de encendido integrado y el indicador de estado de carga la hacen más fácil de usar. El Shield incluso reserva la almohadilla de conexión para SPI-Flash para desarrolladores avanzados que puedan necesitar añadir Flash a Seeed Studio XIAO para ampliar su espacio de memoria, proporcionando a Seeed Studio XIAO más posibilidades.
Con el factor de forma de Seeed Studio XIAO, todas las placas Seeed Studio XIAO son compatibles tanto con el Grove Shield for XIAO como con la Seeed Studio XIAO Expansion board. Hay una ligera diferencia entre los pines y, consultando el Pinout, es fácil de gestionar.
Este producto no incluye una placa Seeed Studio XIAO, haz clic here si necesitas una.
Descripción de hardware
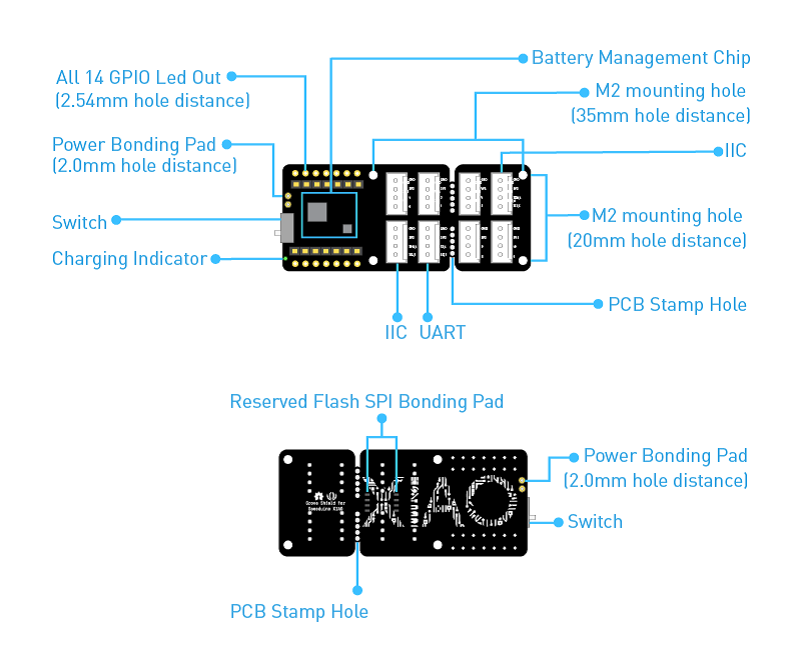
Descripción del pinout

Características
- Función integrada de carga y gestión de batería de litio
- Conectores Grove ( Grove IIC x 2, Grove UART x 1 ), los 14 GPIO sacados
- Diseño compacto y separable
- Almohadilla de conexión Flash SPI reservada
- Interruptor de encendido integrado e indicador luminoso de estado de carga
Especificaciones
| Elemento | Valor |
|---|---|
| Tensión de funcionamiento | 3,3 V / batería de litio de 3,7 V |
| Capacidad de carga | 800 mA |
| Corriente de carga | 500 mA (máx.) |
| Temperatura de funcionamiento | - 40°C a 85°C |
| Temperatura de almacenamiento | -55°C a 150°C |
| Interfaz Grove | I2C 2 / UART 1 |
Aplicaciones
- Dispositivos wearables
- Prototipado rápido
- Pruebas de módulos Grove
- Proyectos que requieren tamaño reducido
Plataformas compatibles
| Arduino | Raspberry Pi |
|---|---|
|
|
Primeros pasos
Materiales necesarios
| Seeed Studio Seeed Studio XIAO | Grove-Doppler-Radar | Seeed Studio Grove Base para XIAO |
|---|---|---|
|
|
|
| Get ONE Now | Get ONE Now | Get ONE Now |



Descripción de los pines de los encabezados externos para Grove-Doppler Radar

| Número de pin | Nombre de señal | Descripción del pin |
|---|---|---|
| 1 | DIV_OUT | Salida del divisor de frecuencia desde el BGT24LTR11 |
| 2 | GND | Tierra |
| 3 | VCC_5V_EXT | Pin de alimentación de entrada externa +5,0 V (máximo = 5,5 V) |
| 4 | VTUNE | Tensión de ajuste de frecuencia del VCO |
| 5 | IFQ_HG | Salida de señal analógica del canal Q del BGT24LTR11 - segunda etapa de ganancia |
| 6 | IFI_HG | Salida de señal analógica del canal I del BGT24LTR11 - segunda etapa de ganancia |
| 7 | PWM_OUT | GPIO configurable externamente por el usuario con CCU4 |
| 8 | OUT1 | Pin GPIO externo (configurable por el usuario) |
| 9 | OUT2 | Pin GPIO externo (configurable por el usuario) |
Conexión de hardware

Conecta suavemente el cable USB y la interfaz del Doppler Radar a la interfaz de la placa de expansión Seeed Studio XIAO, de lo contrario podrías dañar el puerto.
-
Paso 1. Conecta el Doppler Radar a la placa de expansión Seeed Studio XIAO con un cable Grove.
-
Paso 2. Conecta Seeed Studio XIAO al PC mediante un cable USB.
-
Paso 3. Descarga el código, consulta la parte de software.
-
Paso 4. Ejecuta el código y el resultado se mostrará en la pantalla del Serial Monitor en tu Arduino IDE.
Software
Si es la primera vez que trabajas con Arduino, te recomendamos encarecidamente que veas Getting Started with Arduino antes de empezar.
-
Paso 1. Descarga el código de demostración.
-
Paso 2. Copia todo el archivo Seeed_Arduino_DopplerRadar y pégalo en la carpeta de librerías de tu Arduino IDE.
-
Paso 3. Abre el archivo BGT24LTR11_DETECTION_TARGET con tu Arduino IDE.
-
Paso 4. Sube la demo. Si no sabes cómo subir el código, consulta How to upload code.
Código de software
#include "GBT24LTR11.h"
#ifdef __AVR__
#include <SoftwareSerial.h>
SoftwareSerial SSerial(2, 3); // RX, TX
#define COMSerial SSerial
#define ShowSerial Serial
GBT24LTR11<SoftwareSerial> GBT;
#endif
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define COMSerial Serial1
#define ShowSerial SerialUSB
GBT24LTR11<Uart> GBT;
#endif
#ifdef ARDUINO_ARCH_STM32F4
#define COMSerial Serial
#define ShowSerial SerialUSB
GBT24LTR11<HardwareSerial> GBT;
#endif
void setup() {
// put your setup code here, to run once:
ShowSerial.begin(9600);
COMSerial.begin(115200);
GBT.init(COMSerial);
while (!ShowSerial)
;
while (!COMSerial)
;
/*
MODE 0 -->detection target mode
MODE 1 -->I/Q ADC mode
*/
while (!GBT.setMode(0))
;
}
void loop() {
// put your main code here, to run repeatedly:
uint16_t state = 0;
ShowSerial.print("target speed:");
ShowSerial.println(GBT.getSpeed());
state = GBT.getTargetState();
//2 --> target approach
//1 --> target leave
//0 --> Not Found target
if (state == 2) {
ShowSerial.println("target approach");
} else if (state == 1) {
ShowSerial.println("target leave");
}
delay(200);
}
Si todo va bien, puedes ir al Monitor Serie para ver un resultado como el siguiente:

Y si hay un objeto acercándose al radar o pasando cerca, el resultado cambiará como se muestra a continuación:

La precisión mínima de velocidad que el sensor es capaz de detectar es de 52 cm/s, lo que equivale a 0,52 m/s, 3,6 km/h y 2,23 mph. Además, los resultados devueltos por la función getSpeed() son múltiplos de 52 cm/s y son valores absolutos en consecuencia.
Recursos
- [ZIP] Biblioteca de código de demostración
- [PDF] Grove DopplerRadar (BGT24LTR11) Protocolo de comunicación del módulo de radar v1.1.pdf
- [PDF] Hoja de datos ETA 3410
- [ZIP] Grove Shield para Seeeduino XIAO v1.2 SCH y PCB (KiCad)
- [PDF] Esquemático de Grove Shield para Seeeduino XIAO v1.0
Proyecto
Soporte técnico y debate sobre el producto
Gracias por elegir nuestros productos. Estamos aquí para ofrecerte diferentes tipos de soporte y garantizar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para adaptarnos a diferentes preferencias y necesidades.