Grove Basic Kit para Raspberry Pi Pico

La Raspberry Pi Pico es una nueva y popular placa de microcontrolador de bajo coste y alto rendimiento, así que ¿cómo integrar un sensor Grove en ella? El Grove Shield resuelve perfectamente este problema.
El Grove Shield para Pi Pico v1.0 es un shield plug-and-play para Raspberry Pi Pico que integra varios tipos de conectores Grove, incluyendo 2I2C, 3Analógicos, 2UART, 3puertos Digitales, interfaz de depuración SWD y pin SPI, interruptor de alimentación seleccionable 3.3v/5v. Permite construir prototipos y proyectos de forma fácil y rápida sin cables de puente ni protoboard, pudiendo explorar infinitas posibilidades de la Pico. La placa shield es una placa apilable adicional que actúa como un puente entre la Pi Pico y el sistema Grove de Seeed.
Especificación
| Parámetro | Valor/Rango |
|---|---|
| Voltaje de funcionamiento | 3.3/5V |
| Temperatura de funcionamiento | -25℃ a +85℃ |
| Puertos analógicos | 3 |
| Puertos digitales | 3 |
| Puertos UART | 2 |
| Puertos I2C | 2 |
| Tamaño | 56mm x56mm |
Placas compatibles
El Base Shield está probado y es totalmente compatible con Pi Pico.
Descripción general del hardware

-
1-Puertos analógicos: incluye 3 puertos analógicos, A0, A1, A2.
-
2-Puertos digitales: incluye 3 puertos digitales, D16, D18, D20.
-
3-Puerto UART: 2 puertos UART.
-
4-Puertos I2C: 2 puertos I2C.
-
5-Interruptor de alimentación: interruptor de alimentación seleccionable 5V/3.3V.
-
6-Puerto SPI: 1 puerto spi0.
-
Dimensiones: 56mm * 56mm
Primeros pasos
Proyecto 1: Sonidos diferentes desde un zumbador
Materiales requeridos
Paso 1. Prepara los siguientes elementos:
| Pi Pico | Grove Shield para Pi Pico | Grove - Buzzer | Grove - Rotary Angle Sensor |
|---|---|---|---|
 |  |  |  |
| Obtener Uno Ahora | Obtener Uno Ahora | Obtener Uno Ahora | Obtener Uno Ahora |
Paso 2. Conecta el Grove Buzzer al puerto A1 del Grove Shield.
Paso 3. Conecta el Grove Rotary Angle Sensor al puerto A0 del Grove Shield.
Paso 4. Inserta el Grove Shield en la Pi Pico.
Paso 5. Conecta la Pi Pico a tu PC usando un cable USB.

Configuración de software
Paso 1. Descarga Thonny IDE:
Para entorno de desarrollo Linux:
Puedes instalar Thonny de diferentes maneras dependiendo de tu sistema:
-
Paquete binario para PC (Thonny + Python):
bash <(wget -O - https://thonny.org/installer-for-linux) -
Usando pip:
pip3 install thonny -
Para Debian, Raspbian, Ubuntu, Mint y distribuciones similares:
sudo apt install thonny -
Para Fedora:
sudo dnf install thonny
Paso 2. Abre Thonny y conecta tu ordenador a la Raspberry Pi Pico. En Thonny, ve al menú Run, selecciona Select Interpreter y elige "MicroPython (Raspberry Pi Pico)" en la lista desplegable. Luego, selecciona el puerto COM de tu Pi Pico.
Nota: Si no ves "MicroPython (Raspberry Pi Pico)" en la lista de intérpretes, asegúrate de tener instalada la última versión de Thonny.


Paso 3. Si la Raspberry Pi Pico está conectada y ejecutando MicroPython, Thonny debería conectarse automáticamente al REPL. Ahora, copia el siguiente código en Thonny IDE y pulsa el botón verde Run.
from machine import Pin, PWM, ADC
from time import sleep
adc = ADC(0) # ADC input (knob potentiometer) connected to A0
pwm = PWM(Pin(27)) # DAC output (buzzer) connected to A1
pwm.freq(10000)
while True:
val = adc.read_u16() # Read A0 port ADC value (65535~0)
# Drive the buzzer, turn off the buzzer when the ADC value is less than 300
if val > 300:
pwm.freq(int(val / 10))
pwm.duty_u16(10000)
else:
pwm.duty_u16(0)
print(val)
sleep(0.05)
Ahora, gira el Grove Rotary Angle Sensor y escucharás diferentes sonidos del zumbador a medida que ajustas el ángulo.
Proyecto 2: Detección de temperatura y humedad
- Opción 1: DHT11 and SSD1315
- Opción 2: DHT20 y LCD1602
Materiales requeridos
Paso 1. Prepara los siguientes elementos:
| Pi Pico | Grove Shield para Pi Pico | Grove OLED Display 0.96" (SSD1315) | Grove Temperature & Humidity Sensor (DHT11) |
|---|---|---|---|
| |  |  |
Paso 2. Conecta el Grove OLED Display 0.96" al puerto I2C1 del Grove Shield.
Paso 3. Conecta el Grove Temperature Humidity Sensor (DHT11) al puerto D18 del Grove Shield.
Paso 4. Inserta el Grove Shield en la Pi Pico.
Paso 5. Conecta la Pi Pico a tu PC usando un cable USB.
Configuración de software
Consulta la sección de software de la Demo 1.
- Copia el siguiente código en Thonny IDE:
from ssd1306 import SSD1306_I2C
from dht11 import *
from machine import Pin, I2C
from time import sleep
i2c = I2C(1, scl=Pin(7), sda=Pin(6), freq=200000) # OLED connected to I2C1
oled = SSD1306_I2C(128, 64, i2c)
dht2 = DHT(18) # Temperature and humidity sensor connected to D18
while True:
temp, humid = dht2.readTempHumid() # Read temperature and humidity
'''I2C port test and OLED display test'''
oled.fill(0) # Clear the screen
oled.text("Temp: " + str(temp), 0, 0) # Display temperature on line 1
oled.text("Humid: " + str(humid), 0, 8) # Display humidity on line 2
oled.show()
sleep(0.5)
- Descarga los siguientes archivos Python requeridos en tu máquina local:
import time
from machine import Pin
MAXTIMINGS = 85
DHT11 = 11
DHT22 = 22
DHT21 = 21
AM2301 = 21
class DHT(object):
def __init__(self, data_pin,Type=DHT11):
self.Data_pin = data_pin
self.__pinData = Pin(data_pin, Pin.OUT)
self.firstreading = True
self.__pinData.value(1)
self._lastreadtime = 0
self.data=[0]*5
self.temp = 0
self.humid = 0
def read(self):
i=0
j=0
self.__pinData.value(1)
#time.sleep(0.25)
self.data[0] = self.data[1] = self.data[2] = self.data[3] = self.data[4] = 0
# now pull it low for ~20 milliseconds
pinData = Pin(self.Data_pin, Pin.OUT, None)
pinData.value(0)
time.sleep_ms(20)
pinData.value(1)
time.sleep_us(41)
pinData = Pin(self.Data_pin, Pin.IN)
DHT11_TIMEOUT = -1
time_cnt=0
while(0 ==pinData.value()):
time.sleep_us(5)
time_cnt = time_cnt+1
if(time_cnt > 16):
return
# DHT11 pulls the bus up at least 80 US in preparation for sending sensor data.
time_cnt=0
while(1 == pinData.value()):
time.sleep_us(5)
time_cnt = time_cnt+1
if(time_cnt > 16):
return
for j in range(5):
i = 0
result=0
PINC = 1
for i in range(8):
while(not (PINC & pinData.value())): # wait for 50us
pass
#print('wait 50us')
time.sleep_us(25)
if(PINC & pinData.value()):
result |=(1<<(7-i))
while(PINC & pinData.value()): # wait '1' finish
pass
#print('wait 1')
self.data[j] = result
pinData = Pin(self.Data_pin, Pin.OUT, None)
pinData.value(1)
dht11_check_sum = (self.data[0]+self.data[1]+self.data[2]+self.data[3]&0xff)
# check check_sum
if(self.data[4] is not dht11_check_sum):
print("DHT11 checksum error")
#print(self.data)
if ((j >= 4) and ( self.data[4] == dht11_check_sum)):
return True
return False
def readHumidity(self):
if (self.read()):
self.humid = float(self.data[0])
self.humid = self.humid + float(self.data[1]/10)
return self.humid
def readTemperature(self):
if (self.read()):
self.temp = float(self.data[2])
self.temp = self.temp + float(self.data[3]/10)
return self.temp
def readTempHumid(self):
if (self.read()):
self.temp = float(self.data[2])
self.temp = self.temp + float(self.data[3]/10)
self.humid = float(self.data[0])
self.humid = self.humid + float(self.data[1]/10)
return self.temp , self.humid
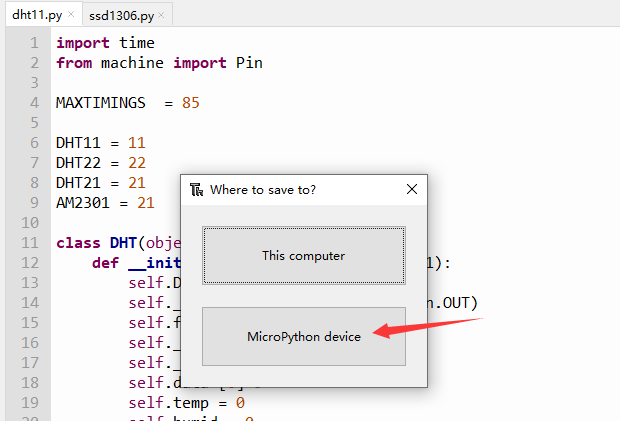
- Abre dht11.py en Thonny IDE, haz clic en
File -> Save As -> MicroPython devicey guarda el archivo con el nombre dht11.py en tu dispositivo.
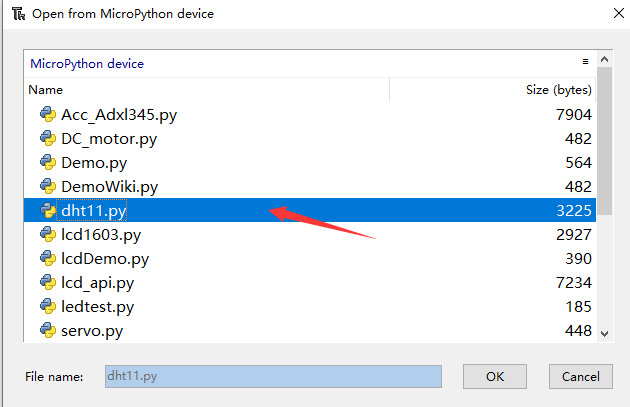
- Repite el mismo proceso para guardar ssd1306.py en tu dispositivo MicroPython.
Ejecución del proyecto
Una vez que ambos archivos estén guardados en tu dispositivo MicroPython, ejecuta el código de demostración presionando el botón verde Run en Thonny.
Ahora deberías ver la temperatura y la humedad mostradas en la pantalla OLED, similar a la imagen de abajo:

Materiales requeridos
Paso 1. Prepara los siguientes elementos:
| Pi Pico | Grove Shield para Pi Pico | Grove 16x2 LCD (Blanco sobre Azul) | Grove Sensor de Temperatura y Humedad V2.0 (DHT20) |
|---|---|---|---|
| |  |  |
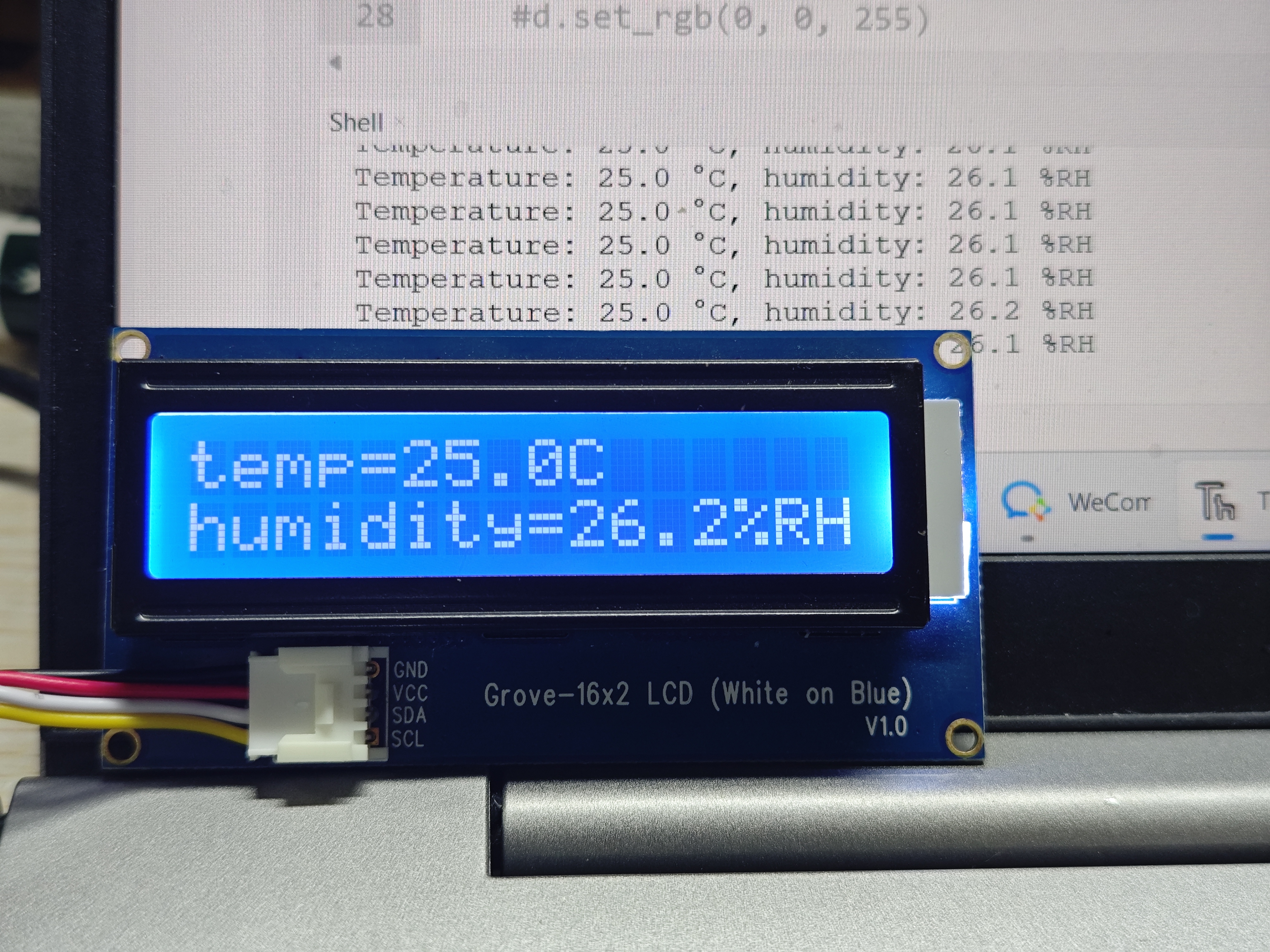
Paso 2. Conecta el Grove 16x2 LCD (Blanco sobre Azul) al puerto I2C1 del Grove Shield.
Paso 3. Conecta el Grove Sensor de Temperatura y Humedad V2.0 (DHT20) al puerto D18 del Grove Shield.
Paso 4. Inserta el Grove Shield en la Pi Pico.
Paso 5. Conecta la Pi Pico a tu PC usando un cable USB.
Configuración de software
Consulta la sección de software de la Demostración 1.
- Copia el siguiente código en Thonny IDE:
from lcd1602 import LCD1602
from dht20 import DHT20
from machine import I2C,Pin
from time import sleep
i2c1 = I2C(1,scl=Pin(7), sda=Pin(6), freq=400000)
d = LCD1602(i2c1, 2, 16)
i2c0 = I2C(0, scl=Pin(9), sda=Pin(8),freq=400000)
dht20 = DHT20(0x38, i2c0)
while True:
measurements = dht20.measurements
temp_rounded = round(measurements['t'], 1)
humidity_rounded = round(measurements['rh'], 1)
print(f"Temperature: {temp_rounded} °C, humidity: {humidity_rounded} %RH")
d.home()
d.print('temp=')
d.print(str(temp_rounded))
d.print('C')
sleep(1)
d.setCursor(0, 1)
d.print('humidity=')
d.print(str(humidity_rounded))
d.print('%RH')
sleep(1)
-
Descarga los siguientes archivos de Python requeridos a tu máquina local:
-
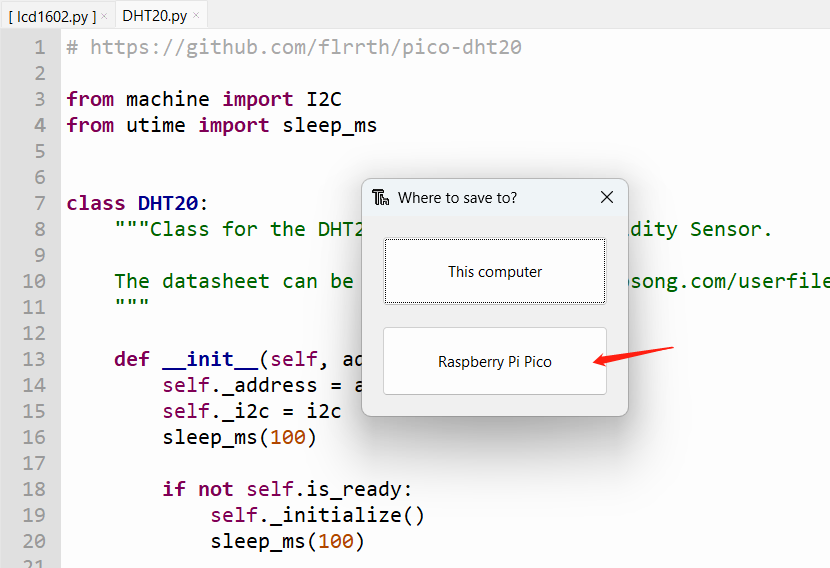
Abre DHT20.py en Thonny IDE, haz clic en
File -> Save As -> MicroPython devicey guarda el archivo con el nombre DHT20.py en tu dispositivo.
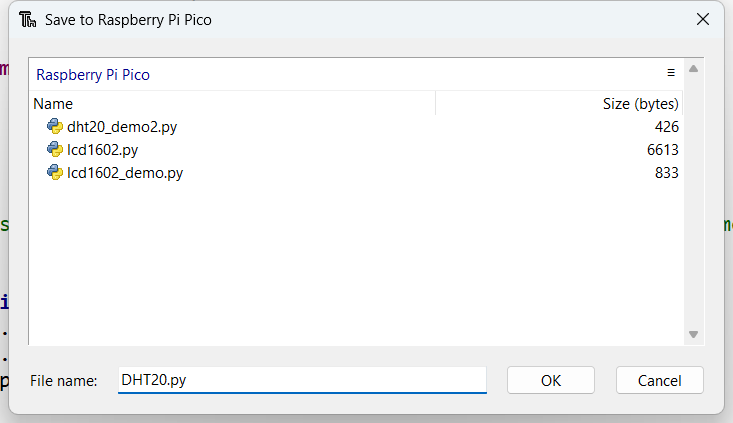
- Repite el mismo proceso para guardar lcd1602.py en tu dispositivo MicroPython.
Ejecución del proyecto
Una vez que ambos archivos estén guardados en tu dispositivo MicroPython, ejecuta el código de demostración presionando el botón verde Run en Thonny.
Ahora deberías ver la temperatura y la humedad mostradas en la pantalla OLED, similar a la imagen de abajo:
Proyecto 3: Control de LED y relé
Materiales requeridos
- Paso 1. Prepara los siguientes elementos:
| Pi Pico | Grove Shield para Pi Pico | Grove-button | Grove-LED | Grove relay |
|---|---|---|---|---|
| |  |  |  |
| Obtener Uno Ahora | Obtener Uno Ahora | Obtener Uno Ahora | Obtener Uno Ahora | Obtener Uno Ahora |
- Paso 2. Conecta el Grove button al pin digital 18 del Base Shield.
- Paso 3. Conecta el Grove LED al puerto D16 del Base Shield.
- Paso 4. Conecta el Grove Relay al puerto D20 del Base Shield.
- Paso 5. Inserta el Grove Shield para Pi Pico en la Pi Pico.
- Paso 6. Conecta la Pi Pico al PC mediante un cable USB.
Software
Consulta la parte de software de la demostración 1.
Copia primero el siguiente código en Thonny IDE.
from machine import Pin
button = Pin(18, Pin.IN, Pin.PULL_UP)# button connect to D18
button.irq(lambda pin: InterruptsButton(),Pin.IRQ_FALLING)#Set key interrupt
led = Pin(16, Pin.OUT)#led connect to D16
relay = Pin(20, Pin.OUT)
tmp = 0
'''Key interrupt function, change the state of the light when the key is pressed'''
def InterruptsButton(): #button input
global tmp
tmp = ~tmp
led.value(tmp)
relay.value(tmp)
while True:
pass
Ahora haz clic en el botón verde para ejecutar el código de demostración.
Luego puedes presionar el Grove button y podrás controlar el encendido y apagado del LED y del relé.

Proyecto 4: Colores intermitentes
Materiales requeridos
- Paso 1. Prepara los siguientes elementos:
| Pi Pico | Grove Shield para Pi Pico | RGB LED WS2813 mini |
|---|---|---|
| |  |
| Obtener Uno Ahora | Obtener Uno Ahora | Obtener Uno Ahora |
- Paso 2. Conecta el RGB LED WS2813 mini al puerto 18 del Base Shield.
- Paso 3. Inserta el Grove Shield para Pi Pico en la Pi Pico.
- Paso 4. Conecta la Pi Pico al PC mediante un cable USB.
Software
Consulta la parte de software de la demostración 1.
Copia primero el siguiente código en Thonny IDE.
from ws2812 import WS2812
import time
BLACK = (0, 0, 0)
RED = (255, 0, 0)
YELLOW = (255, 150, 0)
GREEN = (0, 255, 0)
CYAN = (0, 255, 255)
BLUE = (0, 0, 255)
PURPLE = (180, 0, 255)
WHITE = (255, 255, 255)
COLORS = (BLACK, RED, YELLOW, GREEN, CYAN, BLUE, PURPLE, WHITE)
#WS2812(pin_num,led_count)
led = WS2812(18,30)
print("fills")
for color in COLORS:
led.pixels_fill(color)
led.pixels_show()
time.sleep(0.2)
print("chases")
for color in COLORS:
led.color_chase(color, 0.01)
print("rainbow")
led.rainbow_cycle(0)
Luego descarga el archivo ws2812.py a tu equipo local. Usa Thonny para abrir ws2812.py, haz clic en file->save as->MicroPython device.
Introduce ws2812.py en la columna File name, haz clic en "ok", entonces el archivo se guardará en File->Open->MicroPython device.

Después de haber guardado los archivos en tu dispositivo MicroPython, haz clic en el botón verde para ejecutar el código de demostración. Entonces podrás obtener el mini LED RGB WS2813 parpadeando con hermosos colores como se muestra a continuación.

Proyecto 5: Detección de sonido y luz
Materiales requeridos
- Paso 1. Prepara los siguientes elementos:
| Pi Pico | Grove Shield for Pi Pico | grove sound sensor | Grove light sensor | Grove-16x2 LCD |
|---|---|---|---|---|
| |  |  |  |
| Obtener Uno Ahora | Obtener Uno Ahora | Obtener Uno Ahora | Obtener Uno Ahora | Obtener Uno Ahora |
- Paso 2. Conecta el Grove sound sensor al pin analógico 0 del Base Shield.
- Paso 3. Conecta el Grove light al puerto A1 del Base Shield.
- Paso 4. Conecta el Grove 16X2 lcd al puerto I2C1 del Base Shield.
- Paso 5. Inserta el Grove Shield for Pi Pico en la Pi Pico.
- Paso 6. Conecta la Pi Pico al PC mediante un cable USB.
Software
Consulta la parte de software del demo1.
Copia primero el siguiente código en el IDE Thonny.
#from lcd1602 import LCD1602_RGB #LCD1602 RGB grove
from lcd1602 import LCD1602
from machine import I2C,Pin,ADC
from time import sleep
i2c = I2C(1,scl=Pin(7), sda=Pin(6), freq=400000)
d = LCD1602(i2c, 2, 16)
#d = LCD1602_RGB.display(i2c, 2, 16)
#d.set_rgb(255, 0, 0)
sleep(1)
light = ADC(0)
sound = ADC(1)
while True:
lightVal = light.read_u16()
soundVal = sound.read_u16()
d.home()
d.print('lightvalue=')
d.print(str(lightVal))
#d.set_rgb(0, 255, 0)
sleep(1)
d.setCursor(0, 1)
d.print('soundvalue=')
d.print(str(soundVal))
#d.set_rgb(0, 0, 255)
sleep(1)
Luego descarga el archivo LCD1602.py a tu equipo local. Usa Thonny para abrir LCD1602.py, haz clic en file->save as->MicroPython device.
Introduce LCD1602.py en la columna File name, haz clic en "ok", entonces el archivo se guardará en File->Open->MicroPython device.
En este ejemplo, la versión de LCD1602 que estamos usando es una versión con retroiluminación monocromática. Si necesitas controlar la versión de retroiluminación a todo color de LCD1602, revisa las funciones de este archivo de biblioteca para aprender cómo usarla.

Después de haber guardado los archivos en tu dispositivo MicroPython, haz clic en el botón verde para ejecutar el código de demostración. Entonces podrás obtener los datos del sound sensor y del light sensor como se muestra a continuación.

Proyecto 6: Detección de movimiento
Materiales requeridos
- Paso 1. Prepara los siguientes elementos:
| Pi Pico | Grove Shield for Pi Pico | grove servo | Grove Mini Fan | Grove mini pir motion sensor |
|---|---|---|---|---|
| |  |  |  |
| Obtener Uno Ahora | Obtener Uno Ahora | Obtener Uno Ahora | Obtener Uno Ahora | Obtener Uno Ahora |
- Paso 2. Conecta el Grove servo al pin analógico 1 del Base Shield.
- Paso 3. Conecta el Grove Mini fan al puerto D16 del Base Shield.
- Paso 4. Conecta el Grove mini pir motion sensor al puerto D18 del Base Shield.
- Paso 5. Inserta el Grove Shield for Pi Pico en la Pi Pico.
- Paso 6. Conecta la Pi Pico al PC mediante un cable USB.
Software
Consulta la parte de software del demo1.
Copia primero el siguiente código en el IDE Thonny.
from machine import Pin,ADC,PWM
from time import sleep
import utime
miniFun = Pin(16, Pin.OUT)
miniPir = Pin(18, Pin.IN)
pwm_Servo=PWM(Pin(27))
pwm_Servo.freq(500)
Servo_Val =0
while True:
if miniPir.value() == 1 :
miniFun.value(1)
while Servo_Val<65535:
Servo_Val=Servo_Val+50
utime.sleep_ms(1)
pwm_Servo.duty_u16(Servo_Val)
while Servo_Val>0:
Servo_Val=Servo_Val-50
utime.sleep_ms(1)
pwm_Servo.duty_u16(Servo_Val)
else :
miniFun.value(0)
pwm_Servo.duty_u16(0)
Ahora haz clic en el botón verde para ejecutar el código de demostración. Entonces podrás hacer que el Grove Mini Fan y el Grove servo funcionen cuando pases la mano por delante del pir sensor, como se muestra a continuación.

Visor de esquemáticos en línea
Recursos
- [PDF] Pico python SDK
- [PDF] SCH
- [Eagle] PCB&SCH
Recursos del curso
- [ZIP] Beginners Guide of Raspberry Pi Pico Based on MicroPython
- [ZIP] Codes
- [ZIP] Libraries
Soporte técnico y debate sobre el producto
Gracias por elegir nuestros productos. Estamos aquí para ofrecerte diferentes tipos de soporte y garantizar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para adaptarnos a diferentes preferencias y necesidades.