Sensor mmWave de 24GHz - Módulo de Presencia Estática Humana (MR24HPB1)
Introducción
El Sensor de Radar de Presencia Estática Humana es un módulo mmWave autónomo, protector de privacidad y seguro que opera a 24GHz. Con el radar Doppler mejorado de Infineon y el algoritmo estándar, el módulo es una solución ideal para aplicaciones individuales como hogar inteligente, hotel inteligente y alarma de peligro.
Aplicación
- Hogar Inteligente
Características
- Tecnología confiable: Radar industrial FMCW mmWave de Infineon
- Teoría habilitada: Aplica tecnología de radar Doppler con Sensor de Distancia Cercana (NDS) operando a 24GHz
- Algoritmo estándar: Distingue condiciones ocupadas/desocupadas e identifica actividades humanas en el entorno de auto-adaptación
- Protección perfecta de privacidad: Proporciona capacidades de vigilancia sin identificación
- Ubicación de instalación flexible: Opera correctamente independientemente de los bloques de refugio
- Estado de trabajo inofensivo: Salida de 10 dBm de potencia de energía inofensiva
- Alta precisión: Disminuye la interferencia de objetos no vivos y los resultados de salida logran más del 95% de precisión
- Alta robustez: Mantiene el funcionamiento adecuado en un entorno complejo que contiene diferentes temperaturas, humedad, ruido, corrientes de aire, polvo, luz, etc.
- Antena de alto rendimiento: Detecta incluso micromovimiento en un patrón de haz en abanico donde Horizontal 90°/ Vertical 60°
- Distancia de medición:
- Distancia máxima de percepción de movimiento: hasta 12 metros
- Distancia máxima de percepción de micromovimiento: hasta 5 metros
- Distancia máxima de percepción corporal: hasta 3 metros
- Tiempo de detección:
- Estado desocupado a ocupado: dentro de 0.5 segundos
- Estado tripulado a no tripulado: más de 1 minuto
- Radar personalizable: Soporta desarrollo secundario incluyendo parámetros de radar, protocolo, antena, función
Descripción del Hardware

- Salida S1: nivel alto - ocupado, nivel bajo - desocupado.
- Salida S2: nivel alto - activo, nivel bajo - estacionario
- GP1 a GP4 son controles de selección de parámetros, que pueden ser redefinidos según los requisitos del usuario.
- Las señales de salida de esta interfaz están todas a nivel de 3.3V.
El consumo de energía del producto es de 500mW, lo cual no es adecuado para suministro de energía a largo plazo.
Característica

Primeros Pasos
Descripción de la Librería de Arduino
Si esta es tu primera vez usando Arduino, te recomendamos encarecidamente que consultes Primeros Pasos con Arduino.
El código de la librería utilizado en este ejemplo se puede descargar haciendo clic en el icono de abajo.
Antes de comenzar a desarrollar un sketch, veamos las funciones disponibles de la librería.
-
void recvRadarBytes()—— Esta función toma la longitud del marco actual devuelto por el radar. Los marcos se almacenan en un array según esa longitud. Parámetros de entrada: Ninguno Valor de retorno: Ninguno -
void Bodysign_judgment(byte inf[], float Move_min, float Move_max)—— Los datos devueltos por el radar contienen una gran cantidad de datos físicos. El usuario tiene la flexibilidad de ajustar la información de movimiento detectada basada en los datos de señal y el algoritmo de decodificación proporcionado por la función. El contenido del juicio será enviado a través del puerto serie. Parámetros de entrada:-
byte inf[]—— Marcos de datos enviados por el radar. -
float Move_min—— Determina el umbral del usuario estando en un estado estacionario o desocupado. -
float Move_max—— Determina el valor umbral para que el usuario esté en un estado estacionario o un estado donde alguien está en movimiento.Valor de retorno: Ninguno Acerca de la descripción de los parámetros de señal: Teóricamente, los valores calculados de los parámetros de señal van de 0 a 100. Cuando el valor calculado es 0, significa que nadie es detectado en el entorno circundante. Cuando el valor calculado es 1, significa que se detecta que el entorno está ocupado y en un estado estacionario. Un valor calculado de 2 a 100 indica que se detecta que los alrededores están ocupados y activos.
-
-
void Situation_judgment(byte inf[])—— Esta función detecta si el cuerpo humano se está acercando o alejando de la ubicación donde se encuentra el radar y determina el movimiento del cuerpo humano, según el algoritmo dentro del radar. Esta información será enviada a través del puerto serie. Parámetros de entrada:-
byte inf[]—— Marcos de datos enviados por el radar.Valor de retorno: Ninguno
-
-
void Fall_inf(byte inf[])—— Esta función completa la decodificación de la información de detección de caídas devuelta por el radar e imprime los resultados de la detección del radar a través del puerto serie. Parámetros de entrada:-
byte inf[]—— Marcos de datos enviados por el radar.Valor de retorno: Ninguno
-
-
unsigned short int us_CalculateCrc16(unsigned char *lpuc_Frame, unsigned short int lus_Len)—— Esta función se utiliza para generar suma de verificación CRC16. Parámetros de entrada:-
unsigned char *lpuc_Frame—— El marco de datos que deseas enviar al radar (sin incluir el marco de suma de verificación final de 2 Bytes). -
unsigned short int lus_Len—— La longitud del marco de datos que deseas enviar al radar.Valor de retorno: Dígito de verificación de tipo entero de 2 Bytes.
Valor de retorno: Ninguno
-
-
void SerialInit()—— Establece la velocidad de baudios del puerto serie del radar a 9600. Si es una placa Seeeduino, establece el puerto serie suave a RX: 2, TX: 3. Parámetros de entrada: Ninguno Valor de retorno: Ninguno
Instalación
Paso 1. Necesitas instalar un Software de Arduino.

Paso 2. Inicia la aplicación Arduino.
Paso 3. Selecciona tu modelo de placa de desarrollo y agrégalo al IDE de Arduino.
-
Si quieres usar Seeeduino V4.2 para las rutinas posteriores, por favor consulta este tutorial para terminar de agregarlo.
-
Si quieres usar Seeeduino XIAO para las rutinas posteriores, por favor consulta este tutorial para terminar de agregarlo.
-
Si quieres usar XIAO RP2040 para las rutinas posteriores, por favor consulta este tutorial para terminar de agregarlo.
-
Si quieres usar XIAO BLE para las rutinas posteriores, por favor consulta este tutorial para terminar de agregarlo.
Paso 4. Instala la librería de código de Arduino.
Comienza obteniendo la base de código de GitHub y descargándola a tu computadora local.
Dado que has descargado la Librería zip, abre tu IDE de Arduino, haz clic en Sketch > Include Library > Add .ZIP Library. Elige el archivo zip que acabas de descargar, y si la librería se instala correctamente, verás Library added to your libraries en la ventana de notificación. Lo que significa que la librería se instaló exitosamente.

Materiales Requeridos
Antes de completar los siguientes ejemplos, necesitarás preparar los siguientes materiales.
|  |  |
| Sensor de Radar mmWave de 24GHz | Seeed XIAO BLE nRF52840 Sense | Cable de Cinta de 2mm a 2.54mm de Paso |
Paso 1. Conecta el dispositivo a la computadora a través de la placa principal. El diagrama de cableado se muestra en la tabla de abajo.
 | |||
| Sensor de Radar | Placa Principal | ||
| 5V | --> | 5V | |
| GND | --> | GND | |
| RX | --> | D6 | |
| TX | --> | D7 | |
Paso 2. En la barra de menú en la esquina superior izquierda del IDE de Arduino, selecciona tool, elige el tipo de placa de desarrollo que estás usando y selecciona el puerto serie correspondiente.
Si estás usando MacOS, el nombre del puerto serie del dispositivo a menudo comenzará con /dev/cu.usbmodem xxx, terminando con el nombre del dispositivo. Si estás usando Windows, el nombre del puerto serie del dispositivo a menudo comenzará con COM, nuevamente terminando con el nombre del dispositivo.

En este ejemplo, demostraremos cómo funciona el radar con nuestro producto popular XIAO BLE.
Demo1 Obtención de movimiento humano usando análisis de parámetros característicos
Entre la gran cantidad de datos devueltos por el radar, la información sobre datos físicos constituye la mayoría de la información. A veces, la dependencia excesiva de los algoritmos propios del radar puede producir resultados menos que satisfactorios en algunos escenarios. Entonces, podemos elegir usar la información devuelta por el radar para hacer ajustes adecuados según los escenarios de aplicación reales.
El código en este ejemplo es el siguiente.

//Physical_Parameters_Example.ino
#include <sleepbreathingradar.h>
SleepBreathingRadar radar;
void setup()
{
radar.SerialInit();
Serial.begin(9600);
delay(1500);
Serial.println("Readly");
}
void loop()
{
radar.recvRadarBytes(); //Receive radar data and start processing
if (radar.newData == true) { //The data is received and transferred to the new list dataMsg[]
byte dataMsg[radar.dataLen+1] = {0x00};
dataMsg[0] = 0x55; //Add the header frame as the first element of the array
for (byte n = 0; n < radar.dataLen; n++)dataMsg[n+1] = radar.Msg[n]; //Frame-by-frame transfer
radar.newData = false; //A complete set of data frames is saved
//radar.ShowData(dataMsg); //Serial port prints a set of received data frames
radar.Bodysign_judgment(dataMsg, 1, 15); //Output of human movement using sign parameters
}
}
radar.Bodysign_judgment(dataMsg, 1, 15);
Una vez que se obtiene el array dataMsg, podemos pasar los datos de este array como el primer argumento a la función Bodysign_judgment(), que analiza los parámetros de signos.
El segundo y tercer parámetros de la función Bodysign_judgment() son los valores críticos para juzgar el desocupado y el cuerpo humano en reposo, los valores críticos para el cuerpo humano en reposo y en movimiento, respectivamente.
(1, 15) significa que cuando el valor calculado del signo corporal es menor que 1, se muestra que no hay nadie en el ambiente. Cuando el valor somático es mayor o igual a 1 y menor que 15, la salida es que el ambiente actual está ocupado por alguien en estado estacionario. Cuando el valor del signo corporal es mayor o igual a 35, muestra que hay alguien moviéndose en el ambiente.
Sube el programa. Abriendo tu monitor serie a una velocidad de baudios de 9600 debería mostrar el resultado. La salida debería verse algo como la imagen de abajo.
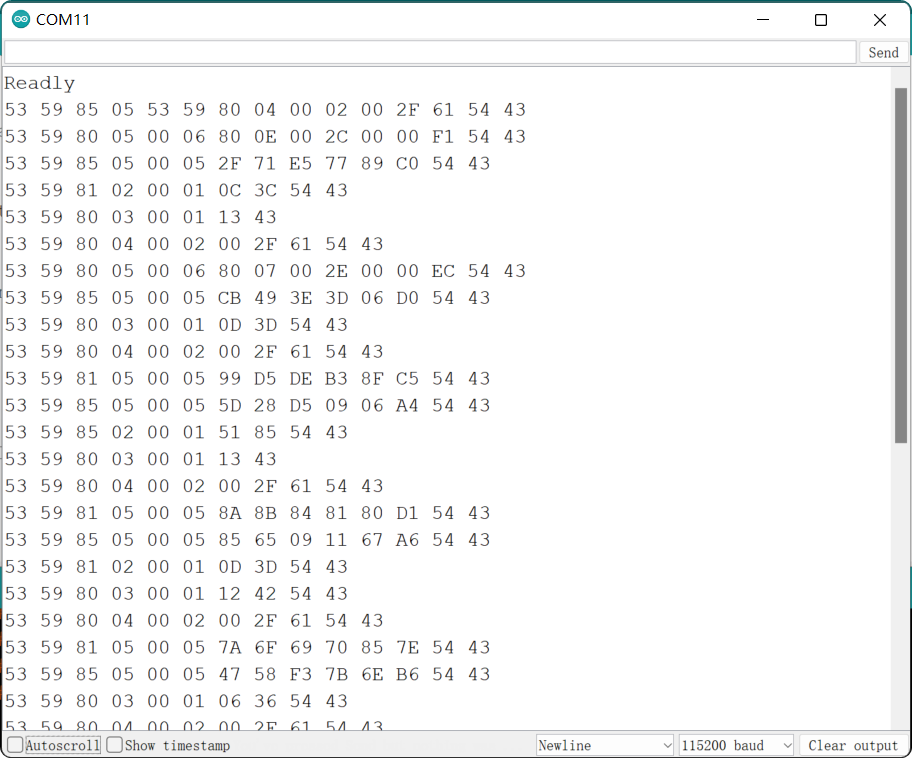
Los valores que siguen al marco de datos de salida representan los valores de signos calculados.
Demo 2 Enviando datos al radar
El radar abre un número muy grande de interfaces para que obtengamos información y para configurar la sensibilidad del radar o la escena. Esta rutina instruirá al usuario sobre cómo usar el manual del usuario para enviar mensajes de datos al radar para ajustar los parámetros del radar o para obtener la información de datos deseada.
Paso 1. Obtener marcos de datos basados en la consulta deseada.
Descarga el manual del usuario en el área de Recursos, y en el Capítulo 8.2, encuentra el contenido de los marcos que necesitas consultar o configurar, y organízalos.
En este ejemplo, asumiendo que quieres consultar el ID del dispositivo radar, deberías poder obtener el código de función deseado, código de dirección 1 y código de dirección 2.

Paso 2. Abre el código de ejemplo en el IDE de Arduino.

El código en este ejemplo es el siguiente.
//CRC_Checksum_Generation.ino
#include <sleepbreathingradar.h>
SleepBreathingRadar radar;
char buff[30];
void setup()
{
radar.SerialInit();
Serial.begin(9600);
delay(1500);
Serial.println("Readly");
}
void loop()
{
//Please fill in the data frame you want to set according to the datasheet(Excluding 2 Byte checksum frames)
unsigned char data[] = {0x55, 0x08, 0x00, 0x05, 0x01, 0x04, 0x03};
unsigned int length = sizeof(data)/sizeof(unsigned char);
unsigned char datas[length + 2];
for (int n = 0; n < length; n++)datas[n] = data[n];
unsigned short int crc_data = radar.us_CalculateCrc16(data, length);
sprintf(buff, "The CRC16 values is: %04x", crc_data);
Serial.println(buff);
datas[length] = (crc_data & 0xff00) >> 8;
datas[length+1] = crc_data & 0xff;
Serial.print("The datas send to the radar: ");
for (int n = 0; n < length + 2; n++){
char buffsend[1];
sprintf(buffsend, "0x%02x ", datas[n]);
Serial.print(buffsend);
}
Serial.println();
delay(6000);
}
Paso 3. Modifica el contenido del marco de datos para generar el marco de datos completo enviado al radar.
Lo que necesitamos modificar es el array data[] en el bucle.
//Please fill in the data frame you want to set according to the datasheet(Excluding 2 Byte checksum frames)
unsigned char data[] = {0x55, 0x08, 0x00, 0x05, 0x01, 0x04, 0x03};
Los lugares que necesitamos modificar son el segundo elemento, del cuarto al último elemento. El marco de cabecera 0x55 es fijo y no necesita ser modificado. El segundo marco es el marco de longitud, por favor modifícalo según la longitud de los datos que envías. El tercer marco es fijo a 0x00. El cuarto marco es el código de función, el quinto marco es el código de dirección 1, y así sucesivamente.
Sobre el método de cálculo del marco de longitud:
Longitud = Longitud de Datos + Código de Función + Código de Dirección 1 + Código de Dirección 2 + Datos + Suma de Verificación. (Los marcos de cabecera no se cuentan)
Consulta el Capítulo 8 del manual del usuario para más información sobre formatos de marcos y reglas.
Sube el programa. Abriendo tu monitor serie a una velocidad de baudios de 9600 debería mostrar el resultado. La salida debería verse algo como la imagen de abajo.

Los datos completos que necesitan ser enviados al radar se mostrarán en el monitor serie.
Otras formas
Si no quieres usar ningún maestro para generar marcos de datos completos, también puedes pegar este código de abajo en un editor que pueda ejecutar programas C. Sigue el procedimiento anterior y llena los datos del array con el contenido de tus marcos.
#include <stdio.h>
const unsigned char cuc_CRCHi[256]= {
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40
};
const unsigned char cuc_CRCLo[256]= {
0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06, 0x07, 0xC7,
0x05, 0xC5, 0xC4, 0x04, 0xCC, 0x0C, 0x0D, 0xCD, 0x0F, 0xCF, 0xCE, 0x0E,
0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09, 0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9,
0x1B, 0xDB, 0xDA, 0x1A, 0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC,
0x14, 0xD4, 0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3,
0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3, 0xF2, 0x32,
0x36, 0xF6, 0xF7, 0x37, 0xF5, 0x35, 0x34, 0xF4, 0x3C, 0xFC, 0xFD, 0x3D,
0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A, 0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38,
0x28, 0xE8, 0xE9, 0x29, 0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF,
0x2D, 0xED, 0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26,
0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60, 0x61, 0xA1,
0x63, 0xA3, 0xA2, 0x62, 0x66, 0xA6, 0xA7, 0x67, 0xA5, 0x65, 0x64, 0xA4,
0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F, 0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB,
0x69, 0xA9, 0xA8, 0x68, 0x78, 0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA,
0xBE, 0x7E, 0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5,
0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71, 0x70, 0xB0,
0x50, 0x90, 0x91, 0x51, 0x93, 0x53, 0x52, 0x92, 0x96, 0x56, 0x57, 0x97,
0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C, 0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E,
0x5A, 0x9A, 0x9B, 0x5B, 0x99, 0x59, 0x58, 0x98, 0x88, 0x48, 0x49, 0x89,
0x4B, 0x8B, 0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C,
0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42, 0x43, 0x83,
0x41, 0x81, 0x80, 0x40
};
static unsigned short int us_CalculateCrc16(unsigned char *lpuc_Frame, unsigned short int lus_Len){
unsigned char luc_CRCHi = 0xFF;
unsigned char luc_CRCLo = 0xFF;
int li_Index=0;
while(lus_Len--){
li_Index = luc_CRCLo ^ *( lpuc_Frame++);
luc_CRCLo = (unsigned char)( luc_CRCHi ^ cuc_CRCHi[li_Index]);
luc_CRCHi = cuc_CRCLo[li_Index];
}
return (unsigned short int )(luc_CRCLo << 8 | luc_CRCHi);
}
int main() {
//Please fill in the data frame you want to set according to the datasheet(Excluding 2 Byte checksum frames)
unsigned char data[] = {0x55, 0x07, 0x00, 0x01, 0x01, 0x01};
unsigned short int crc_data = 0x0000;
unsigned int length = sizeof(data)/sizeof(unsigned char);
unsigned char datas[length + 2];
for (int n = 0; n < length; n++)datas[n] = data[n];
printf("The data frame length is: %d\n", length);
crc_data = us_CalculateCrc16(data, length);
datas[length] = (crc_data & 0xff00) >> 8;
datas[length+1] = crc_data & 0xff;
printf("The last two CRC check digits are: %04x\n", crc_data);
printf("The datas send to the radar: ");
for (int n = 0; n < length + 2; n++){
printf("0x%02x ", datas[n]);
}
printf("\n");
return 0;
}
Después de la ejecución del editor, también es posible generar las tramas de datos completas que necesitan ser enviadas al radar.

Paso 4. Enviar tramas de datos al radar.
Conecta el radar directamente al puerto USB de la computadora a través de un dispositivo UART a USB. El cableado se muestra en la tabla a continuación.
 | |||
| Sensor de Radar | Placa Principal | ||
| 5V | --> | 5V | |
| GND | --> | GND | |
| RX | --> | TX | |
| TX | --> | RX | |
Usa un software como asistente de depuración serial para seleccionar el puerto serie donde se encuentra el radar.
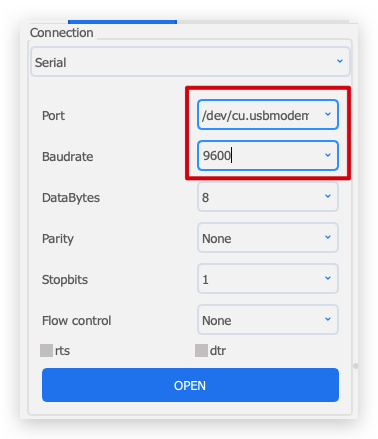
El radar de 24GHz necesita alimentación de 5V, de lo contrario el radar puede no funcionar correctamente.
Después de una conexión exitosa, verás el radar enviando un flujo constante de mensajes.

Pega la trama de datos completa que obtuvimos en el paso 3 en el área de envío del software. Luego haz clic en Enviar.
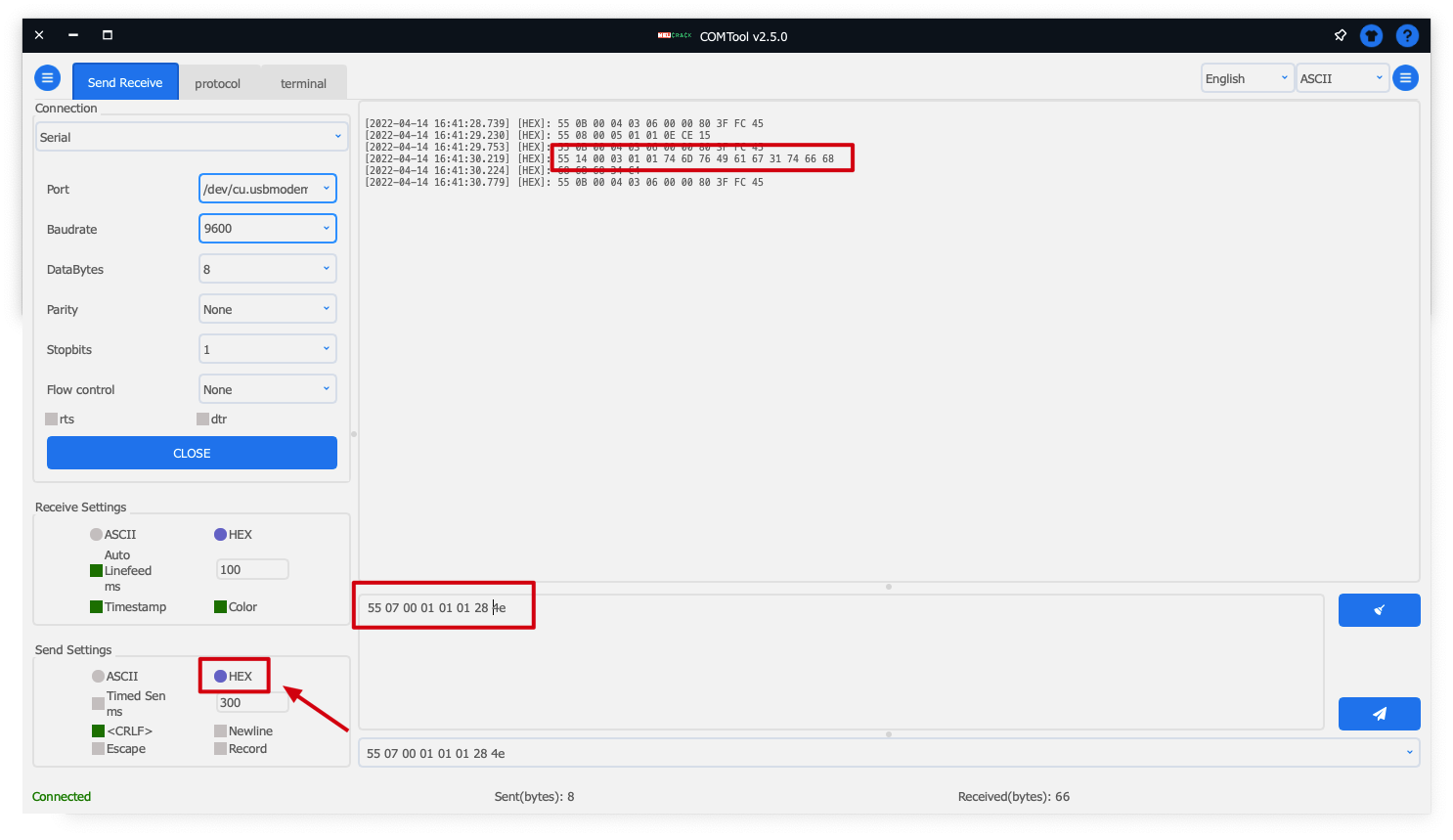
Puedes buscar un conjunto de datos devueltos con el tercer elemento siendo 0x03. Este conjunto de datos es la información obtenida después de la consulta. Si envías datos que ajustan los parámetros del radar, también devolverá dicha información.
Si eliges ASCII como formato para enviar datos, cada conjunto de datos necesita tener el prefijo 0x. Si eliges HEX, entonces cada conjunto de datos no necesita tener el prefijo 0x.
Solución de Problemas
FAQ1: ¿Cómo aplicar el código a Seeeduino (o Arduino)?
Debido al diseño de hardware diferente, el puerto serie de la serie XIAO o Wio Terminal se llama Serial1, mientras que Seeeduino o Arduino necesitan usar puerto serie suave. Si quieres usar el radar para Seeeduino, puedes cambiar el puerto serie suave o usar los pines 2 (RX) y 3 (TX).

FAQ2: ¿Qué debo hacer si XIAO BLE y el Radar recopilan datos durante mucho tiempo y no pueden cargar el código?
En este momento, puedes usar tu dedo para presionar ligeramente el botón de reinicio en la parte superior de XIAO BLE para volver a cargar el programa y ejecutarlo.
Recursos
- [PDF] Manual de Usuario de Presencia Humana
- [ZIP] Esquemático respiratorio de 24GHz
- [PPTX] Serie de sensores mmWave de Seeed V2.0
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarte diferentes tipos de soporte para asegurar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para satisfacer diferentes preferencias y necesidades.