Primeros Pasos con AC1

Introducción
Active Camera, inventada por RoboSense, es una categoría revolucionaria en visión robótica diseñada para abordar los desafíos de percepción de movilidad y cognición operacional.
El AC1, el primero de esta serie, integra múltiples sensores para entregar fusión a nivel de hardware de información de profundidad, datos de imagen y datos de postura de movimiento, sincronizados en tiempo y espacio. Esto permite a los robots capturar detalles ambientales completos, superando interferencias de la luz solar y superficies altamente reflectantes, y adaptándose a diversos escenarios interiores y exteriores.
En esta wiki, demostraremos el proceso detallado de usar AC1 junto con reComputer Robotics.
Prerrequisitos
| AC1 | reComputer Robotics J4012 |
|---|---|
|  |
Conexión de Hardware
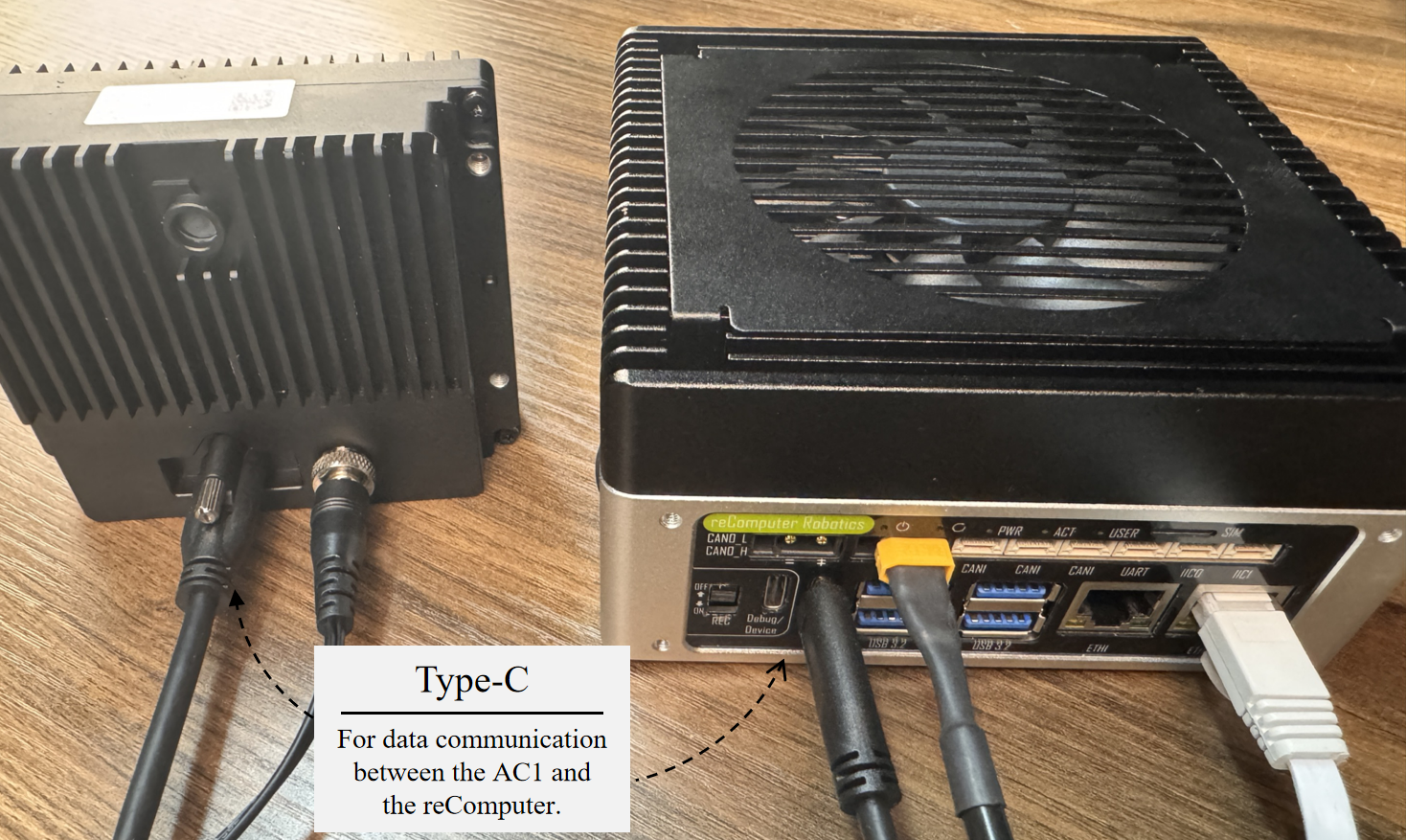
Primeros Pasos
Paso 1. Instalar ROS en reComputer Robotics J4012
a. Agregar el siguiente contenido a ~/.bashrc.
export CUDA_HOME=/usr/local/cuda
export PATH=$CUDA_HOME/bin:$PATH
export LD_LIBRARY_PATH=$CUDA_HOME/lib64:$LD_LIBRARY_PATH
export PATH=/usr/src/tensorrt/bin:$PATH
Podemos abrir el archivo en la terminal ingresando el comando vim ~/bashrc.
b. Ingresar el siguiente comando en la terminal para instalar ROS2.
sudo apt install software-properties-common -y
sudo add-apt-repository universe
sudo apt update
sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt update
sudo apt install ros-humble-desktop -y
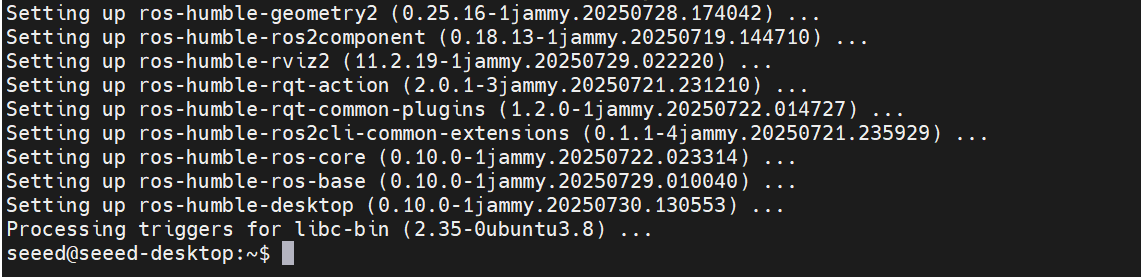
Para verificar si ROS2 se ha instalado exitosamente, podemos crear dos nuevas terminales en el dispositivo y ejecutar los siguientes comandos respectivamente.
# terminal1
ros2 run demo_nodes_cpp talker
# terminal2
ros2 run demo_nodes_py listener
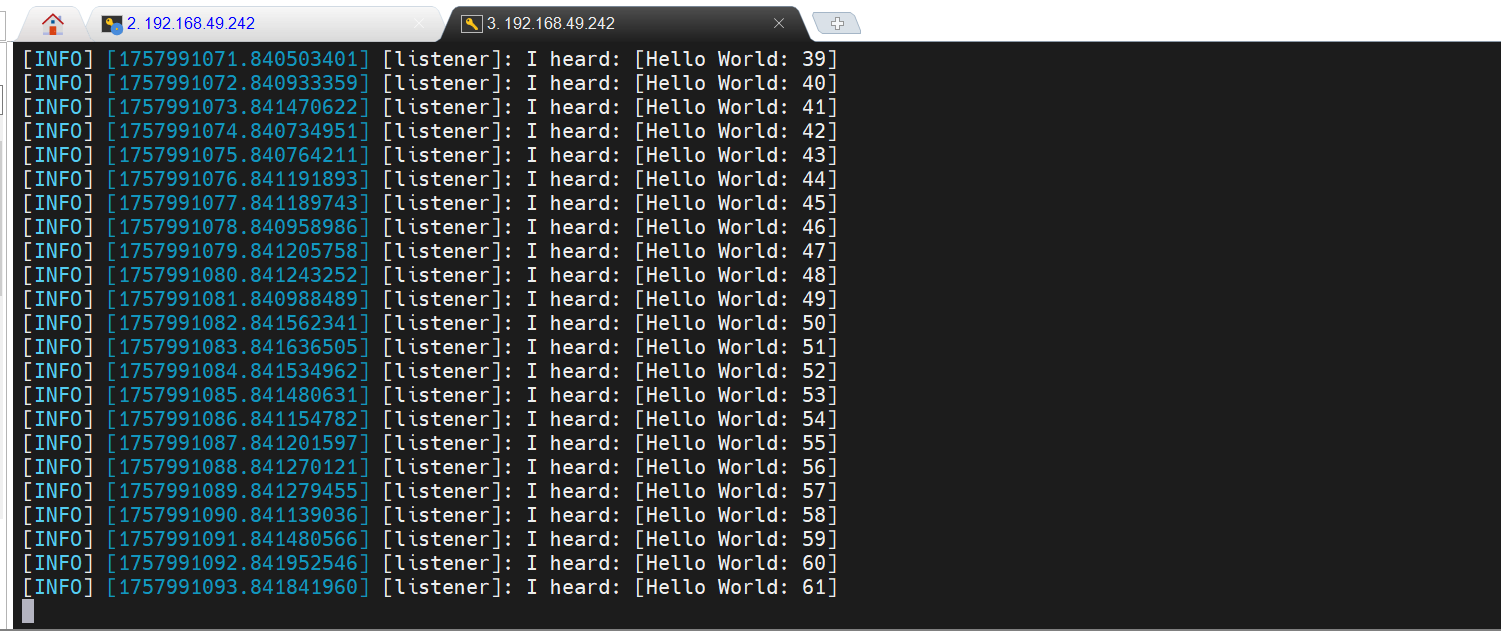
¡Si ambas terminales imprimen los mensajes, significa que ROS 2 Humble se ha instalado exitosamente! 🎉
Paso 2. Instalar ROS SDK para AC1
Ingresar el siguiente comando en la terminal de reComputer.
git clone https://github.com/RoboSense-Robotics/robosense_ac_ros2_sdk_infra.git
sudo apt-get install libavformat-dev libavdevice-dev libavcodec-dev
sudo apt install python3-colcon-common-extensions -y
echo "source /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bash" >> ~/.bashrc
source ~/.bashrc
cd robosense_ac_ros2_sdk_infra/modules/
colcon build
source install/setup.bash

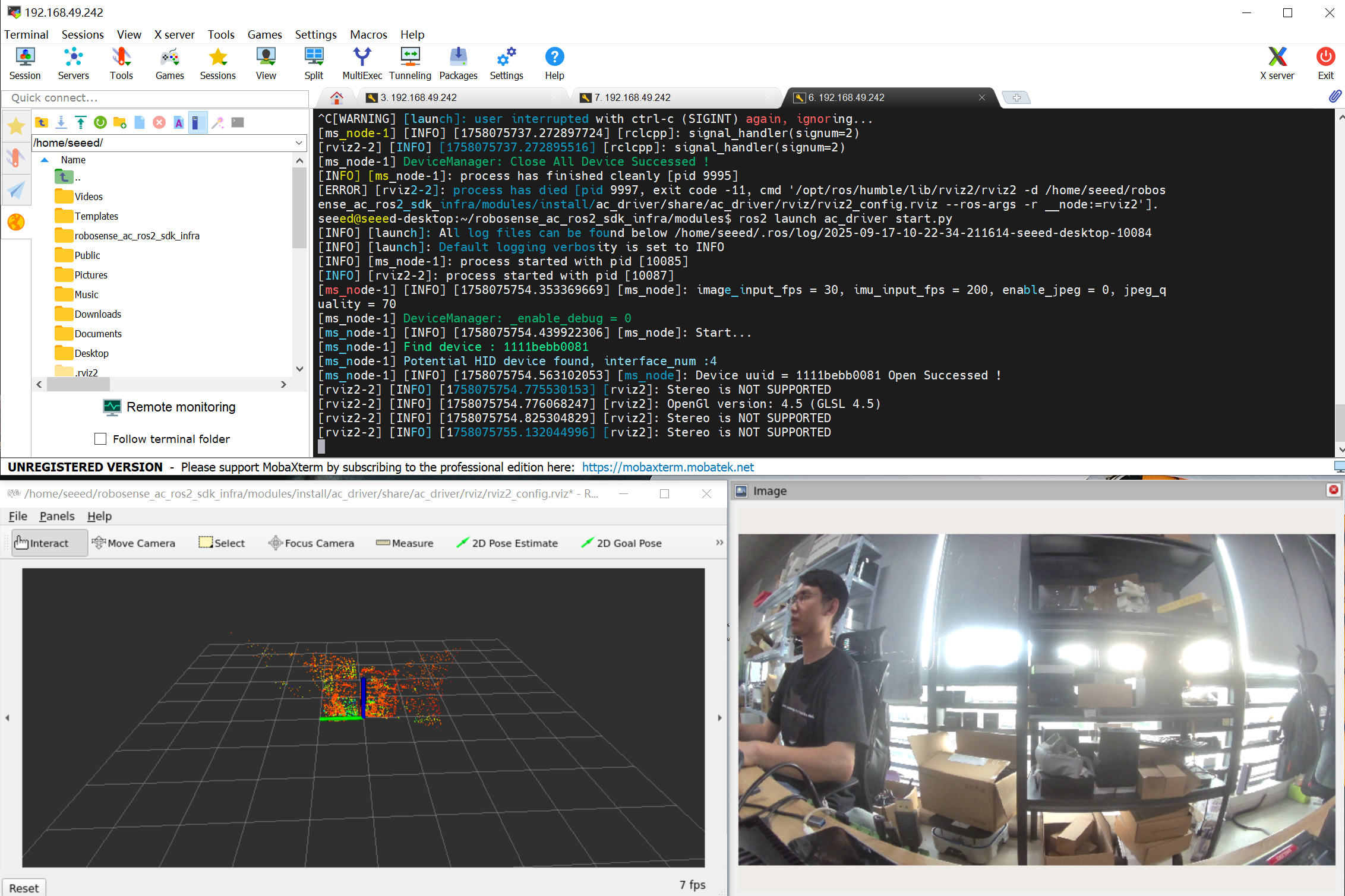
Si todo va bien, podemos visualizar los datos del entorno capturados por AC1 usando Rviz.
ros2 launch ac_driver start.py
Siguiente Paso
Muchos algoritmos avanzados pueden ser reproducidos usando AC1 junto con reComputer Jetson. Para más detalles, por favor consulte aquí.
Recursos
- https://robosense-wiki-en.readthedocs.io/en/latest/
- https://github.com/RoboSense-Robotics/robosense_ac_ros2_sdk_infra
- https://www.seeedstudio.com/reComputer-Robotics-J3011-with-GMSL-extension-board-p-6538.html
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarle diferentes tipos de soporte para asegurar que su experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para atender diferentes preferencias y necesidades.