Controla múltiples robots Reachy Mini con una consola de baile de flota en Jetson
Introducción
Este wiki muestra cómo crear una demostración de baile multi-robot con Reachy Mini y dispositivos Jetson.
En este proyecto, cada Jetson ejecuta un servicio local de baile de Reachy Mini en Docker, exponiendo tanto una Web UI como una REST API. Un panel de control de flota independiente, basado en un portátil, puede descubrir múltiples IP de Jetson en la misma LAN y difundir los mismos comandos de baile a todos los robots Reachy Mini conectados al mismo tiempo.
El resultado final es una demo en la que puedes:
- ejecutar un Reachy Mini por dispositivo Jetson
- abrir un panel central en el navegador de tu portátil
- añadir dinámicamente múltiples direcciones IP de Jetson
- iniciar o detener el baile de todos los robots a la vez
- cambiar BPM, estilo de baile y energía para toda la flota
- activar acciones de acento y centrado en todos los robots a la vez
Este proyecto contiene dos capas:
reachy_bpm_dancer: el servicio de un solo robot que se ejecuta en cada Jetsonreachy_fleet_control: el panel central de flota que se ejecuta en el portátil
Tabla de contenidos
- Preparación de hardware
- Arquitectura del sistema
- Preparar cada Jetson para Reachy Mini
- Desplegar el servicio de baile de Reachy Mini en Docker
- Ejecutar el panel de control de flota en el portátil
- Controlar múltiples robots Reachy Mini
- Referencia de la REST API
- Solución de problemas
- Referencias
Preparación de hardware
Lista de dispositivos
- 1 portátil con Windows o PC de control en la misma LAN
- 1 o más dispositivos Jetson
- 1 Reachy Mini conectado a cada Jetson por USB
- 1 router o switch de red para acceso LAN
Este flujo de trabajo es adecuado para dispositivos de borde basados en Jetson, incluidos los dispositivos de la serie reComputer Jetson de Seeed, siempre que el sistema de destino pueda ejecutar Docker y acceder al Reachy Mini a través de serie USB.
| Kit reComputer Mini J501 | Reachy Mini Lite |
|---|---|
 |  |
Cableado y conexión
Para cada nodo de robot:
- conecta Reachy Mini al Jetson mediante USB
- enciende el Jetson
- asegúrate de que el portátil y todos los dispositivos Jetson estén en la misma LAN
Lista de comprobación de encendido
En cada Jetson, verifica que el dispositivo serie de Reachy Mini sea visible:
ls /dev/ttyACM*
Si puedes ver un dispositivo como /dev/ttyACM0, el enlace de hardware está listo.
Arquitectura del sistema
Esta demo utiliza un diseño de concentrador y radios:
- cada Jetson aloja un contenedor de baile de Reachy Mini
- cada contenedor expone la Web UI local del robot y la REST API en el puerto
8042 - el portátil ejecuta una aplicación web de control de flota en el puerto
8060 - el portátil consulta todas las APIs de Jetson y distribuye los mismos comandos de control a todos los robots en línea
El servicio del lado Jetson está diseñado para control de movimiento simbólico de baja latencia. Utiliza un bucle ligero set_target() y no depende de entrada de micrófono ni de cámara.
Diseño de red sugerido:
Laptop (Fleet Control, port 8060)
|- Jetson A -> Reachy Mini A -> http://<jetson-a-ip>:8042
|- Jetson B -> Reachy Mini B -> http://<jetson-b-ip>:8042
|- Jetson C -> Reachy Mini C -> http://<jetson-c-ip>:8042
Preparar cada Jetson para Reachy Mini
Ejecuta los siguientes pasos en cada Jetson que vaya a controlar un Reachy Mini.
sudo apt update
sudo apt install -y nvidia-container curl
curl https://get.docker.com | sh && sudo systemctl --now enable docker
sudo nvidia-ctk runtime configure --runtime=docker
sudo systemctl restart docker
sudo usermod -aG docker $USER
newgrp docker
sudo apt install -y jq
sudo jq '. + {"default-runtime": "nvidia"}' /etc/docker/daemon.json | \
sudo tee /etc/docker/daemon.json.tmp && \
sudo mv /etc/docker/daemon.json.tmp /etc/docker/daemon.json
sudo systemctl daemon-reload && sudo systemctl restart docker
Desplegar el servicio de baile de Reachy Mini en Docker
Descargar y ejecutar la imagen de Docker
Descarga la imagen de Docker desde aquí.
Si recibiste una imagen empaquetada como reachy-bpm-dancer_20260323_linux-arm64.tar.gz:
docker load -i reachy-bpm-dancer_20260323_linux-arm64.tar.gz
docker run -d \
--name reachy-bpm-dancer \
--restart unless-stopped \
-p 8042:8042 \
-p 8000:8000 \
--device /dev/ttyACM0:/dev/ttyACM0 \
-e REACHY_SERIAL_PORT=/dev/ttyACM0 \
reachy-bpm-dancer:20260323-arm64
Verificar el servicio del lado Jetson
Abre la interfaz local de un solo robot:
http://<jetson-ip>:8042/
Abre la documentación de la API:
http://<jetson-ip>:8042/docs
Comprueba el estado del robot desde la terminal:
curl http://127.0.0.1:8042/api/status
Inicia el baile del robot:
curl -X POST http://127.0.0.1:8042/api/dance/start \
-H "Content-Type: application/json" \
-d '{"bpm":124,"style":"anthem","energy":1.15}'
Detén el robot:
curl -X POST http://127.0.0.1:8042/api/dance/stop
El servicio del lado Jetson expone:
- Web UI en el puerto
8042 - REST API en el puerto
8042 - demonio de Reachy Mini en el puerto
8000
Ejecutar el panel de control de flota en el portátil
El panel de control de flota se ejecuta por separado en tu portátil y te permite gestionar todos los nodos Jetson desde un solo navegador.
Preparar el entorno local de Python
En el portátil:
git clone https://github.com/yuyoujiang/reachy_fleet_control
cd reachy_fleet_control
python -m venv .venv
.\.venv\Scripts\python -m pip install -e .
Esta demostración utiliza Windows. Si tu PC ejecuta un sistema operativo diferente, utiliza los comandos correspondientes para instalar el entorno.
Iniciar la Web UI de control de flota
.\.venv\Scripts\python -m uvicorn reachy_fleet_control.main:app --host 0.0.0.0 --port 8060
Luego abre:
http://127.0.0.1:8060/
O accede desde otro dispositivo en la LAN:
http://<laptop-ip>:8060/
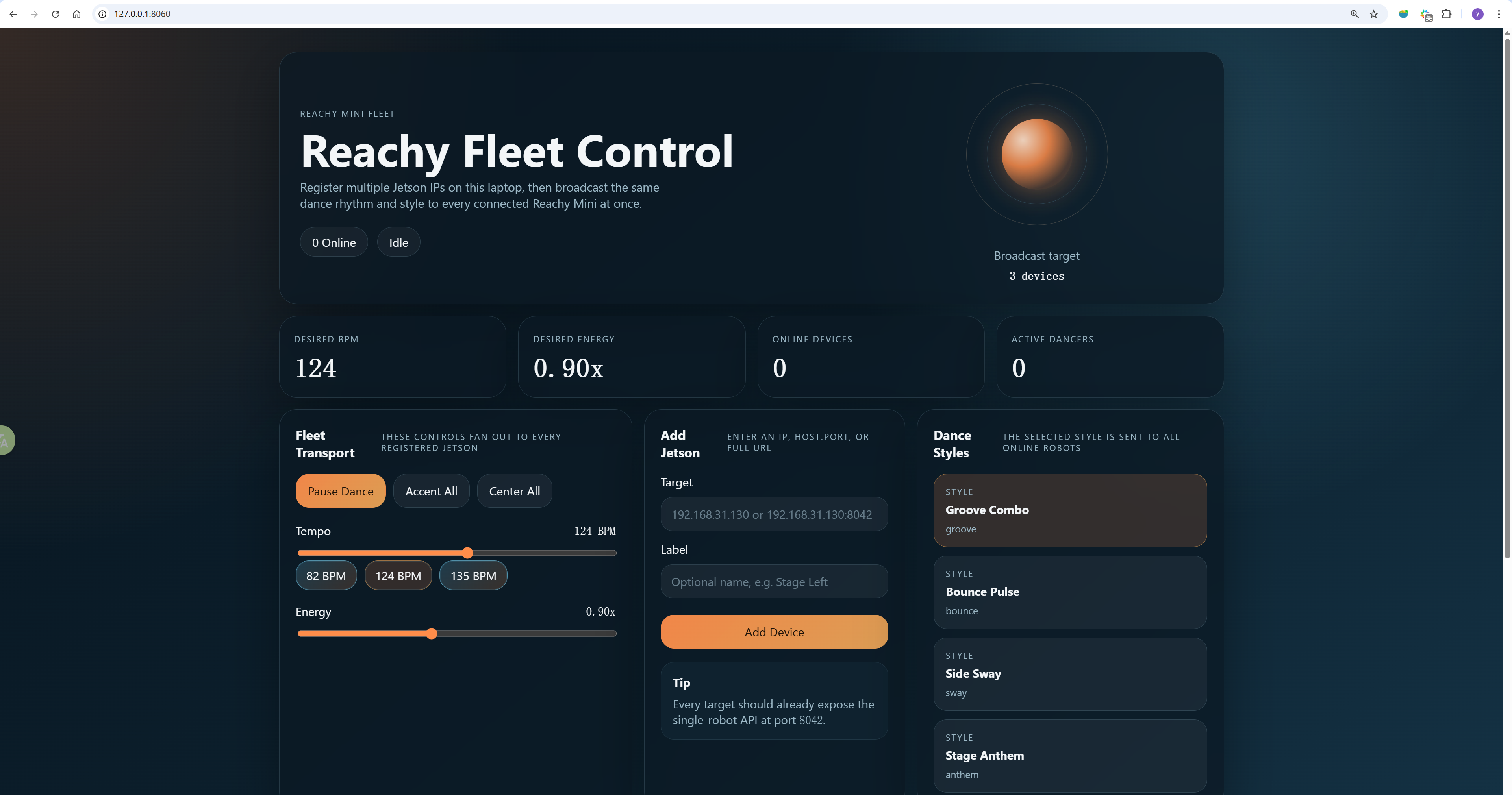
Funciones del panel de flota
El panel admite:
- añadir IP de Jetson,
host:porto URLs completas - eliminar nodos Jetson fuera de línea o sin uso
- monitorizar el estado en línea y la latencia por robot
- difundir comandos de baile a cada Reachy Mini registrado
- mantener la lista de dispositivos en un archivo de estado local
La lista de dispositivos se almacena localmente en Windows en:
C:\Users\<username>\.reachy_fleet_control\fleet_state.json
Controlar múltiples robots Reachy Mini
Una vez que ambas capas estén en ejecución, el flujo de trabajo multi-robot es sencillo.
Paso 1. Añadir dispositivos Jetson
En la página de Fleet Control:
- introduce una IP de Jetson como
192.168.1.130 - opcionalmente añade una etiqueta
- haz clic en Add Device
Repite el mismo paso para cada Jetson en la LAN.
Paso 2. Comprobar el estado en línea
Cada tarjeta de dispositivo mostrará:
- endpoint
- etiqueta
- estado en línea o fuera de línea
- BPM actual
- conteo de beats
- latencia
Si un dispositivo está fuera de línea, el panel lo mantendrá en la lista y seguirá consultándolo hasta que vuelva.
Paso 3. Difundir un comando de baile
Utiliza los controles compartidos para actualizar todos los robots a la vez:
- Start Dance
- Pause Dance
- Accent All
- Center All
- preajustes de BPM:
82,124,135 - selección de estilo:
groove,bounce,sway,anthem - control deslizante de energía
Paso 4. Observar la flota
Cuando la difusión se realiza correctamente:
- todos los robots Reachy Mini en línea cambian al mismo BPM deseado
- el estilo seleccionado se aplica a todos los robots
- el recuento de dispositivos activos se actualiza en el panel
- cada Jetson continúa generando movimiento localmente, por lo que un pequeño jitter de red no detiene el bucle de baile
Demostración del efecto
Referencia de la REST API
Este proyecto expone dos capas de API.
API de un solo robot del lado Jetson
URL base:
http://<jetson-ip>:8042
Endpoints disponibles:
GET /apiGET /api/statusGET /api/stylesGET /api/presetsPOST /api/settingsPOST /api/dance/startPOST /api/dance/stopPOST /api/dance/accentPOST /api/dance/center
Ejemplo:
curl -X POST http://<jetson-ip>:8042/api/dance/start \
-H "Content-Type: application/json" \
-d '{"bpm":135,"style":"anthem","energy":1.2}'
API de flota del lado del portátil
URL base:
http://<laptop-ip>:8060
Endpoints disponibles:
GET /apiGET /api/fleet/statusPOST /api/fleet/devicesDELETE /api/fleet/devices?endpoint=<host:port>POST /api/fleet/settingsPOST /api/fleet/dance/startPOST /api/fleet/dance/stopPOST /api/fleet/dance/accentPOST /api/fleet/dance/center
Añadir un dispositivo Jetson:
Invoke-RestMethod `
-Uri "http://127.0.0.1:8060/api/fleet/devices" `
-Method Post `
-ContentType "application/json" `
-Body '{"target":"192.168.1.130","label":"Stage Left"}'
Iniciar todos los robots:
Invoke-RestMethod `
-Uri "http://127.0.0.1:8060/api/fleet/dance/start" `
-Method Post `
-ContentType "application/json" `
-Body '{"bpm":124,"style":"anthem","energy":1.15}'
Detener todos los robots:
Invoke-RestMethod `
-Uri "http://127.0.0.1:8060/api/fleet/dance/stop" `
-Method Post
Solución de problemas
Reachy Mini no se detecta en el Jetson
Comprueba que el nodo serie USB existe:
ls /dev/ttyACM*
Si es necesario, actualiza la asignación de dispositivos de Docker y el valor de REACHY_SERIAL_PORT.
El puerto 8042 o 8060 ya está en uso
Detén el proceso antiguo o elige un puerto diferente antes de iniciar el servicio de nuevo.
El panel de control de la flota muestra un dispositivo como desconectado
Comprueba lo siguiente:
- el portátil y el Jetson están en la misma LAN
- el servicio de Jetson se está ejecutando
- el cortafuegos de Jetson no bloquea el puerto
8042 - la dirección IP introducida en el panel es correcta
El robot no se mueve pero la API responde
Comprueba los registros del contenedor en el Jetson:
docker compose logs -f
Confirma también que:
- Reachy Mini está conectado al Jetson
- la ruta del dispositivo serie coincide con la configuración del contenedor
- el robot no está siendo utilizado por otro proceso
Referencias
Soporte técnico y debate sobre el producto
Gracias por elegir nuestros productos. Estamos aquí para ofrecerte diferentes tipos de soporte y garantizar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para adaptarnos a diferentes preferencias y necesidades.