Sistema de Procesamiento de Imágenes con Cámara USB Dual YOLOv26 en Jetson
Esta wiki demuestra cómo construir un sistema de procesamiento de imágenes con cámara USB dual basado en el modelo YOLOv26 y aceleración TensorRT desde cero. El sistema incluye las siguientes características:
- Procesamiento Paralelo de Cámara Dual: Procesamiento de flujo de video en tiempo real para dos cámaras USB simultáneamente
- Análisis de Visión Multi-tarea: Detección de objetos, estimación de pose, segmentación de imágenes (modelo SAM)
- Aceleración TensorRT: Mejora significativamente la velocidad de inferencia usando el motor NVIDIA TensorRT
- Vista Previa de Interfaz Web: Ver resultados de procesamiento en tiempo real a través de un navegador
- Compresión MJPEG: Reduce el uso de ancho de banda USB y mejora la estabilidad del sistema
Prerrequisitos
- reComputer J4012 u otros productos de la reComputer Serie
- 2 cámaras USB
- Cable de transmisión de datos USB Type-C (Conectar la cámara)
Descargar desde GitHub
Método 1: Clonar Todo el Repositorio (Recomendado)
Este es el método más simple para obtener todos los archivos de una vez:
# 1. Navigate to your home directory
# !!Replace this with your own username
cd /home/seeed
# 2. Clone the repository
git clone https://github.com/bleaaach/yolov26_jetson.git
# 3. Navigate to the project directory
cd yolov26_jetson
# 4. View downloaded files
ls -la
Deberías ver los siguientes archivos:
run_dual_camera_docker.sh- Script de despliegue Dockerrun_dual_camera_local.sh- Script de despliegue localREADME.md- Este archivo de documentación
Método 2: Descargar Archivos Individuales
Si solo necesitas archivos de script específicos, puedes descargarlos individualmente usando wget:
# 1. Navigate to your home directory
cd /home/seeed
# 2. Create project directory
mkdir -p yolov26_jetson
cd yolov26_jetson
# 3. Download Docker script
wget https://raw.githubusercontent.com/bleaaach/yolov26_jetson/main/run_dual_camera_docker.sh
# 4. Download Local script
wget https://raw.githubusercontent.com/bleaaach/yolov26_jetson/main/run_dual_camera_local.sh
# 5. Download README documentation
wget https://raw.githubusercontent.com/bleaaach/yolov26_jetson/main/README.md
# 6. View downloaded files
ls -la
Verificar Archivos Descargados
Después de descargar, verifica que los archivos existan:
# View file list
ls -la
# Check file permissions
Si los scripts no tienen permisos de ejecución, agrégalos:
# Add execute permissions
chmod +x run_dual_camera_docker.sh
chmod +x run_dual_camera_local.sh
# Check again
ls -la
Comparación de Dos Métodos de Despliegue
| Característica | Método Docker | Método Local |
|---|---|---|
| Aislamiento de Entorno | ✅ Completamente aislado, no contamina el entorno host | ❌ Instalado directamente en el host |
| Velocidad de Despliegue | ✅ Rápido, inicio con un clic | ❌ Requiere instalación manual de muchas dependencias |
| Acceso a Hardware | ⚠️ Requiere configuración de mapeo de dispositivos | ✅ Acceso directo a todo el hardware |
| Rendimiento | ⚠️ Tiene sobrecarga de contenedor | ✅ Mejor rendimiento |
| Espacio de Almacenamiento | ⚠️ Requiere imagen Docker de ~2GB | ✅ Menor uso de almacenamiento |
| Caso de Uso Recomendado | Pruebas rápidas, despliegue multi-dispositivo | Entorno de producción, mejor rendimiento |
(Opción 1) Configuración de Entorno Local
Paso 1. Actualizar Lista de Paquetes e Instalar pip
# Update package list
sudo apt update
# Install pip
sudo apt install python3-pip -y
# Upgrade pip
pip install -U pip
Si pip no está preinstalado en el sistema, usa el siguiente comando para instalar:
# Download get-pip.py
curl https://bootstrap.pypa.io/get-pip.py -o get-pip.py
# Install pip
python3 get-pip.py --user
Paso 2. Instalar Paquete Ultralytics
Instala Ultralytics y sus dependencias opcionales (para exportación de modelos):
# Install Ultralytics
~/.local/bin/pip install ultralytics[export]
Paso 3. Instalar PyTorch y Torchvision
Importante: PyTorch y Torchvision instalados vía pip no son compatibles con la arquitectura ARM64 de Jetson. Necesitas instalar manualmente versiones construidas específicamente para Jetson.
Primero desinstala versiones incompatibles:
# Uninstall incompatible versions
~/.local/bin/pip uninstall torch torchvision -y
Luego instala versiones compatibles con JetPack 6.1:
# Install PyTorch 2.5.0
~/.local/bin/pip install https://github.com/ultralytics/assets/releases/download/v0.0.0/torch-2.5.0a0+872d972e41.nv24.08-cp310-cp310-linux_aarch64.whl
# Install Torchvision 0.20
~/.local/bin/pip install https://github.com/ultralytics/assets/releases/download/v0.0.0/torchvision-0.20.0a0+afc54f7-cp310-cp310-linux_aarch64.whl
Si la descarga de GitHub es lenta, puedes usar un proxy de aceleración:
# Use gh proxy to download PyTorch
~/.local/bin/pip install https://gh-proxy.com/https://github.com/ultralytics/assets/releases/download/v0.0.0/torch-2.5.0a0+872d972e41.nv24.08-cp310-cp310-linux_aarch64.whl
# Use gh proxy to download Torchvision
~/.local/bin/pip install https://gh-proxy.com/https://github.com/ultralytics/assets/releases/download/v0.0.0/torchvision-0.20.0a0+afc54f7-cp310-cp310-linux_aarch64.whl
Paso 4. Instalar cuSPARSELt
cuSPARSELt es una dependencia de PyTorch 2.5.0 y necesita ser instalado por separado:
# Install cuSPARSELt
sudo apt-get install -y libcusparselt0
Paso 5. Instalar onnxruntime-gpu
onnxruntime-gpu se usa para algunas funciones de exportación de modelos. Dado que el paquete en PyPI no contiene binarios aarch64 para Jetson, se requiere instalación manual:
# Install onnxruntime-gpu 1.23.0
~/.local/bin/pip install https://gh-proxy.com/https://github.com/ultralytics/assets/releases/download/v0.0.0/onnxruntime_gpu-1.23.0-cp310-cp310-linux_aarch64.whl
O usa la versión 1.20.0:
# Install onnxruntime-gpu 1.20.0
~/.local/bin/pip install https://gh-proxy.com/https://github.com/ultralytics/assets/releases/download/v0.0.0/onnxruntime_gpu-1.20.0-cp310-cp310-linux_aarch64.whl
Paso 6. Configurar Variable de Entorno PATH
Dado que se usa el modo de instalación de usuario, los ejecutables instalados por pip se ubican en el directorio ~/.local/bin/. Se recomienda agregar este directorio a la variable de entorno PATH:
# Add to .bashrc
echo 'export PATH=$PATH:~/.local/bin' >> ~/.bashrc
# Reload .bashrc
source ~/.bashrc
Paso 7. Verificar Instalación
Verifica las versiones de paquetes instalados:
# Check versions
python3 -c "import ultralytics; import torch; import torchvision; import onnxruntime; print('ultralytics version:', ultralytics.__version__); print('torch version:', torch.__version__); print('torchvision version:', torchvision.__version__); print('onnxruntime version:', onnxruntime.__version__)"
Salida esperada:
ultralytics version: 8.4.7
torch version: 2.5.0a0+872d972e41.nv24.08
torchvision version: 0.20.0a0+afc54f7
onnxruntime version: 1.23.0
Paso 8. Probar Funcionalidad de Inferencia YOLOv26
from ultralytics import YOLO
import torch
# Check if CUDA is available
print(f"CUDA available: {torch.cuda.is_available()}")
if torch.cuda.is_available():
print(f"CUDA device count: {torch.cuda.device_count()}")
print(f"CUDA device name: {torch.cuda.get_device_name(0)}")
# Load YOLOv26n model
model = YOLO('yolo26v26n.pt')
print(f"Model loaded successfully!")
# Perform inference test
results = model('https://ultralytics.com/images/bus.jpg')
print(f"Inference successful! Detected {len(results[0].boxes)} objects")
# Display detection results
for i, box in enumerate(results[0].boxes):
cls_id = int(box.cls[0])
conf = float(box.conf[0])
cls_name = model.names[cls_id]
print(f" Object {i+1}: {cls_name} (confidence: {conf:.2f})")
Paso 9. Preparar Archivos de Modelo
Asegúrate de que los archivos de modelo se descarguen en la ubicación correcta:
# Check model directory
ls -la /home/seeed/ultralytics_data/
# Create directory if it doesn't exist
mkdir -p /home/seeed/ultralytics_data
Si los archivos de modelo no existen, descárgalos primero:
# Navigate to model directory
cd /home/seeed/ultralytics_data
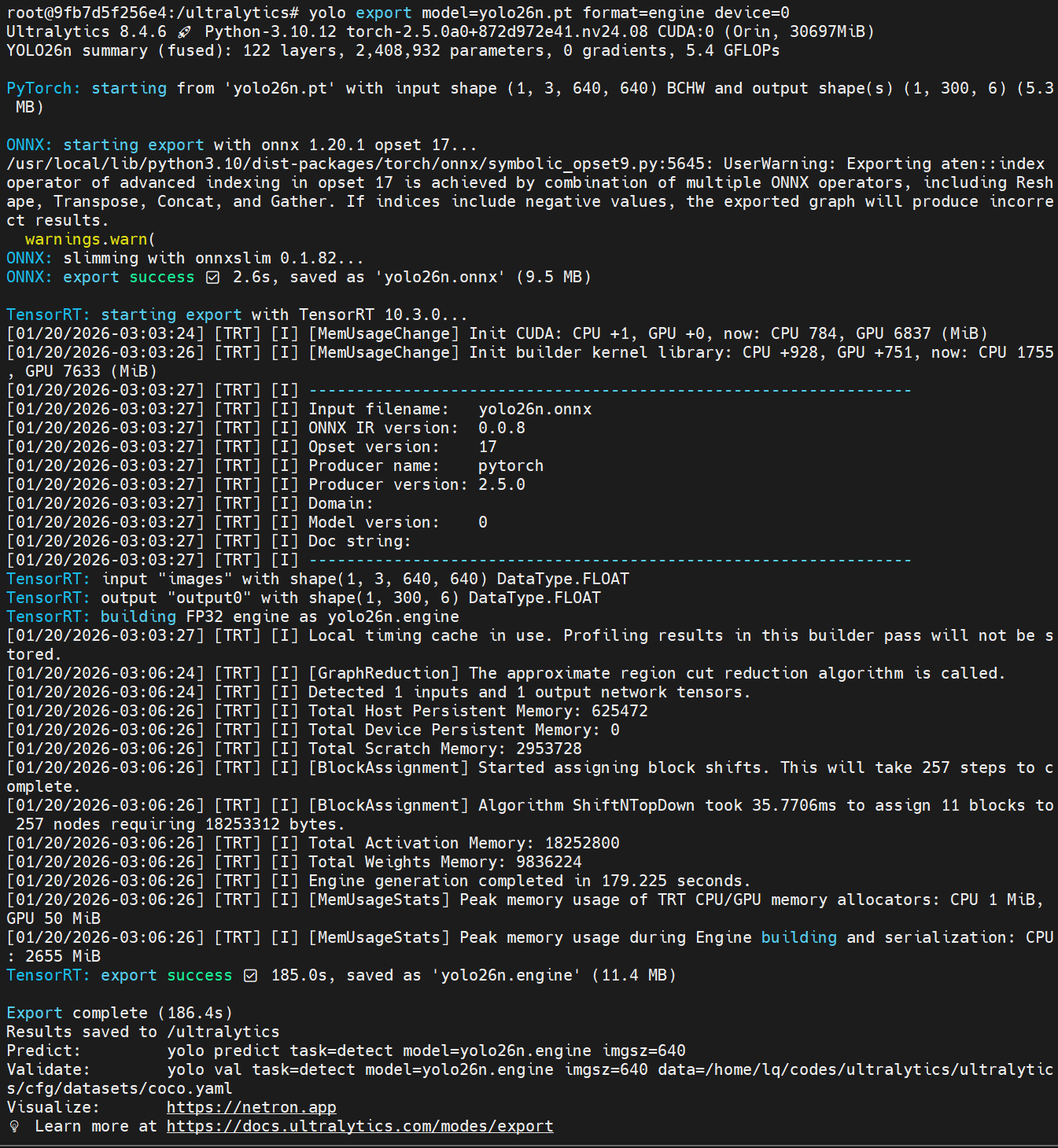
# Download object detection model
yolo export model=yolov26n.pt format=engine device=0
# Download pose estimation model
yolo export model=yolov26n-pose.pt format=engine device=0
# Download segmentation model
yolo export model=yolov26n-seg.pt format=engine device=0
# Verify model files
ls -la
Deberías ver los siguientes archivos:
yolo26n.engineyolo26n-pose.engineyolo26n-seg.engine
Paso 10. Ejecutar Script Local
Ahora puedes ejecutar el script Local:
# 1. Navigate to project directory
cd /home/seeed/yolov26_jetson
# 2. Ensure script has execute permissions
chmod +x run_dual_camera_local.sh
# 3. Run Local script
./run_dual_camera_local.sh
(Opción 2) Configuración de Entorno Docker
Paso 1. Asegurar que Docker esté Instalado
Primero verifica si Docker está instalado:
# Check Docker version
docker --version
Si Docker no está instalado, instálalo primero:
# Update package list
sudo apt update
# Install Docker
sudo apt install docker.io -y
# Start Docker service
sudo systemctl start docker
# Add current user to docker group
sudo usermod -aG docker $USER
# Re-login to apply changes
newgrp docker
Para más detalles sobre la configuración del entorno Docker, consulta este repositorio de GitHub: https://github.com/zibochen6/reComputer-Jetson-for-Beginners/tree/main/3-Basic-Tools-and-Getting-Started/3.7-Docker/
Paso 2. Asegurar que el Servicio Docker esté Ejecutándose
# Check Docker service status
sudo systemctl status docker
Si Docker no está ejecutándose, inícialo:
# Start Docker service
sudo systemctl start docker
Paso 3. Preparar Archivos de Modelo
Asegúrate de que los archivos del modelo se descarguen en la ubicación correcta:
# Check model directory
ls -la /home/seeed/ultralytics_data/
# Create directory if it doesn't exist
mkdir -p /home/seeed/ultralytics_data
Si los archivos del modelo no existen, descárgalos primero:
# Navigate to model directory
cd /home/seeed/ultralytics_data
# Download object detection model
yolo export model=yolov26n.pt format=engine device=0
# Download pose estimation model
yolo export model=yolov26n-pose.pt format=engine device=0
# Download segmentation model
yolo export model=yolov26n-seg.pt format=engine device=0
# Verify model files
ls -la
Deberías ver los siguientes archivos:
yolo26n.engineyolo26n-pose.engineyolo26n-seg.engine
Paso 4. Ejecutar Script de Docker
Ahora puedes ejecutar el script de Docker:
# 1. Navigate to project directory
cd /home/seeed/yolov26_jetson
# 2. Ensure script has execute permissions
chmod +x run_dual_camera_docker.sh
# 3. Run Docker script
./run_dual_camera_docker.sh
Paso 5. Acceder a la Interfaz Web
Abre la siguiente dirección en tu navegador:
http://localhost:5000
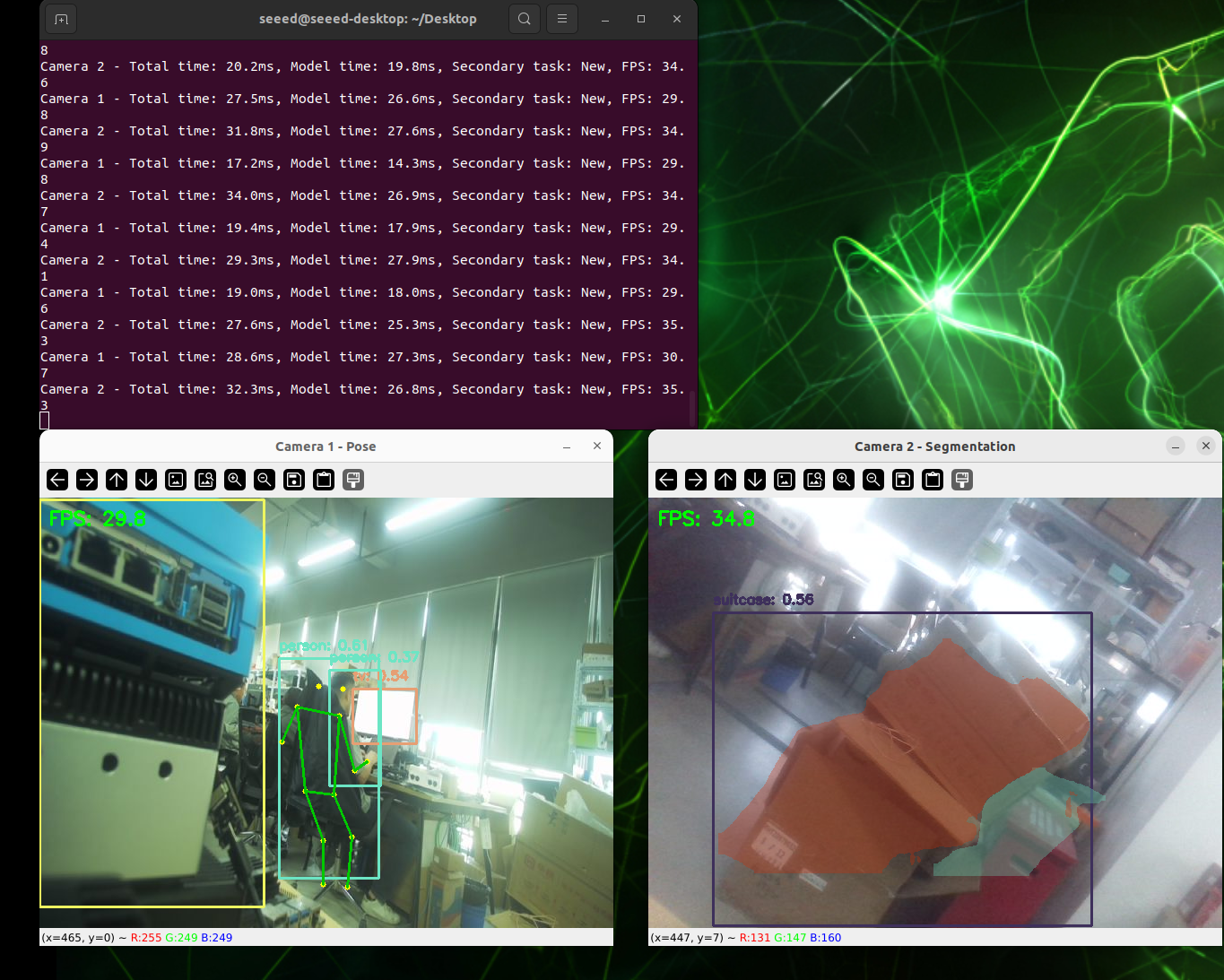
En este momento el navegador mostrará las transmisiones en tiempo real de ambas cámaras lado a lado, similar a "Transmisión de Cámara Izquierda | Transmisión de Cámara Derecha". La velocidad de fotogramas y resolución reales dependen del rendimiento de tu hardware.
Si necesitas reiniciar el sistema:
# 1. Stop and remove existing container
docker rm -f dual-camera-system
# 2. Re-run script
cd /home/seeed/yolov26_jetson
./run_dual_camera_docker.sh
Recursos
Soporte Técnico y Discusión de Productos
¡Gracias por elegir productos de Seeed Studio! Para soporte técnico y discusión de productos, utiliza los siguientes canales: