Cómo Usar Múltiples Cámaras CSI en reComputer con ROS
Introducción
Este tutorial proporciona una guía paso a paso sobre cómo leer datos de imagen de múltiples cámaras CSI a través de ROS en dispositivos de la serie reComputer J30/J40 y publicar temas de imagen para mostrarlos en la interfaz de visualización RVIZ.

Prerrequisitos
-
Serie reComputer J30/40: Asegúrate de haber completado la instalación del sistema JetPack 5.x y el entorno ROS Noetic según los tutoriales proporcionados.
-
Las cámaras compatibles son las siguientes:
-
Cámaras IMX219
- Raspberry Pi Camera V2
- Cámara IMX219-130 8MP con FOV de 130°
- Cámara IMX219-160 8MP con FOV de 160°
- Cámara IMX219-200 8MP con FOV de 200°
- Cámara IMX219-77 8MP con FOV de 77°
- Módulo de Cámara CMOS IMX219 M12/CS mount
- Módulo de Cámara Estéreo 3D IMX219-83 8MP
- Cámara de Visión Nocturna IR IMX219-77IR 8MP con FOV de 77°
- Cámara IMX219-160IR 8MP con FOV de 160°
- Módulo de Cámara CMOS IMX219 M12/CS mount
-
Cámaras IMX477
-
Comenzando
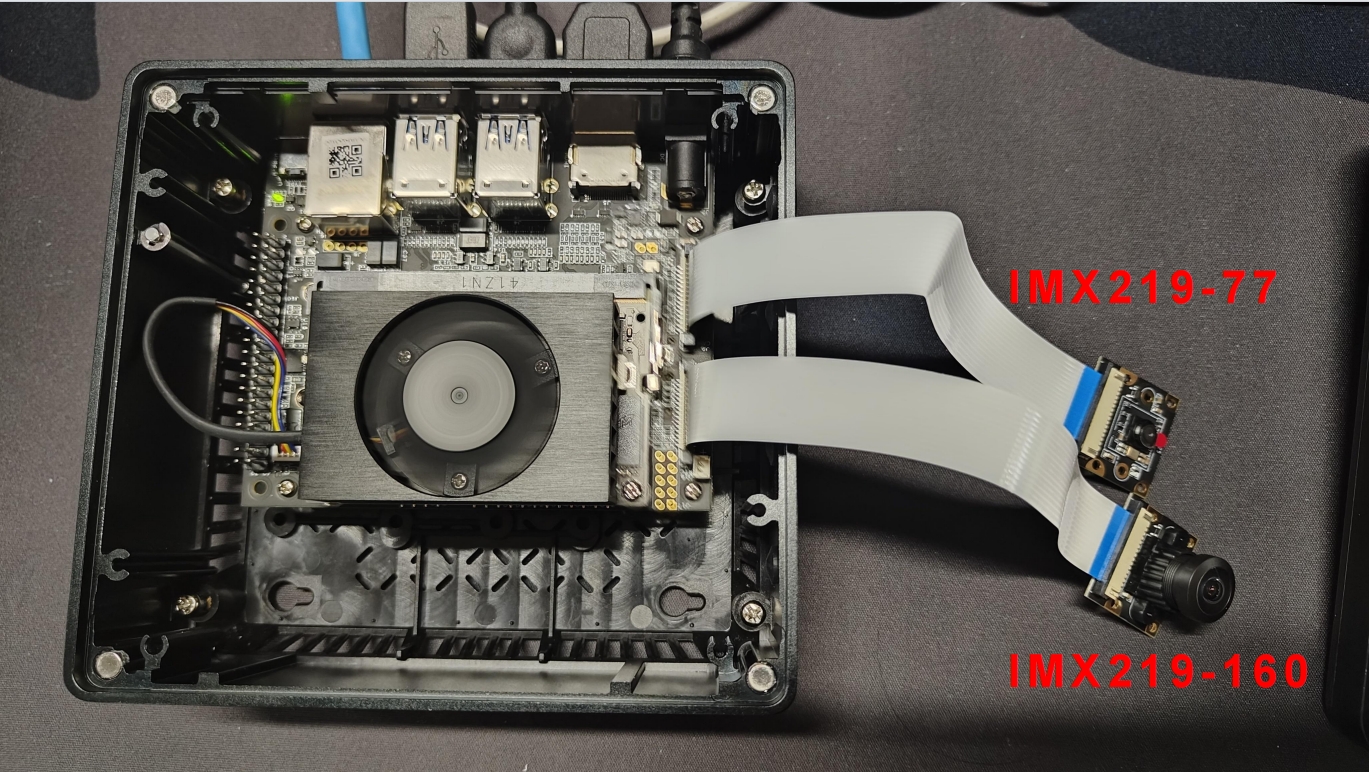
Conectando las Cámaras
Por favor, sigue este tutorial para completar la Conexión y prueba de las cámaras CSI, y asegúrate de que ROS ya esté instalado en tu sistema.
Instalación
-
Paso 1: Abre una terminal en tu reComputer y crea un directorio para tu espacio de trabajo:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src -
Paso 2: Clona el paquete ROS deseado:
git clone https://github.com/ZhuYaoHui1998/csi_camera_reader.git -
Paso 3: Construye el espacio de trabajo:
cd ~/catkin_ws/
catkin_make -
Paso 4: Ejecuta el archivo de configuración nuevamente para actualizar tu entorno:
source devel/setup.bash
Uso
-
Para publicar el flujo de una cámara al tema ROS /csi_cam_0/image_raw, usa este comando en la terminal:
roslaunch csi_camera_reader csi_camera.launch sensor_id:=0 -
También puedes cambiar sensor_id a 1 para que coincida con tu interfaz:
roslaunch csi_camera_reader csi_camera.launch sensor_id:=1 -
Si quieres abrir dos cámaras CSI simultáneamente y publicar temas a ROS, puedes ejecutar los siguientes comandos:
roslaunch csi_camera_reader dual_camera.launchPuedes ingresar el comando "rostopic list" en la terminal para ver los temas de imagen publicados por las cámaras.

También puedes usar la herramienta de visualización RVIZ para suscribirte a los temas de imagen y ver la información visual.

Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarte diferentes tipos de soporte para asegurar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para satisfacer diferentes preferencias y necesidades.