Introducción a los Motores Serie Damiao 43
Este artículo presentará cómo comenzar con los motores de la serie Damiao 43 y cómo usarlos con C++ y Python en el reComputer Mini Jetson Orin.

Especificaciones
Aquí está la tabla completa con todos los parámetros completados para todos los modelos de motor:
| Modelo de Motor | Torque Nominal (Nm) | Torque Pico (Nm) | Velocidad Sin Carga (rpm) | Velocidad Nominal (rpm) | Relación de Reducción | Tamaño Diámetro*Altura (mm) | Peso (g) | Voltaje de Alimentación (V) | Rango de Voltaje Recomendado (V) | Corriente de Fase Nominal (A) | Corriente de Fase Pico (A) | Potencia Nominal (W) | Pares de Polos | Método de Comunicación | Tipo de Encoder | Instalación | Resistencia de Fase (Ω) | Inductancia de Fase (uH) | Enlace de Flujo (Wb) | Inercia Rotacional (Kg*m²) | Constante de Torque (Nm/A) | Corriente Máxima del Driver (A) | KP del Bucle de Velocidad | PMAX por Defecto (rad) | VMAX por Defecto (rad/s) | TMAX por Defecto (Nm) | Constante de Velocidad |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| J4310-2EC V1.1 | 3 | 7 | 200 | 120 | 10 | 57 * 46 | ~300 | 24 | 15-32 | 3.7 | 7.2 | 37.699112 | 14 | CAN, CANFD | Magnético, Dual | Integrado | 0.85 | 345 | 0.0045 | 1.80E-05 | 0.945 | 10.261194 | 3.72E-04 | 12.5 | 30 | 10 | 87.512523 |
| J4310-2EC V1.1(48V) | 3 | 7 | 400 | 120 | 10 | 57 * 46 | ~300 | 48 | 15-52 | 3.7 | 7.2 | 37.699112 | 14 | CAN, CANFD | Magnético, Dual | Integrado | 0.85 | 345 | 0.0045 | 1.80E-05 | 0.945 | 10.261194 | 3.72E-04 | 12.5 | 30 | 10 | 87.512523 |
| J4340-2EC | 9 | 27 | 52.5 | 36 | 40 | 57 * 53.3 | ~362 | 24 | 15-32 | 3 | 8 | 33.929201 | 14 | CAN, CANFD | Magnético, Dual | Integrado | 0.88 | 360 | 0.00485 | 2.00E-05 | 4.074 | 10.261194 | 9.59E-05 | 12.5 | 8 | 28 | 81.197186 |
| J4340-2EC(48V) | 9 | 27 | 100 | 36 | 40 | 57 * 53.3 | ~362 | 48 | 15-52 | 2.5 | 9 | 33.929201 | 14 | CAN, CANFD | Magnético, Dual | Integrado | 0.88 | 360 | 0.00485 | 2.00E-05 | 4.074 | 10.261194 | 9.59E-05 | 12.5 | 8 | 28 | 81.197186 |
| J4340P-2EC | 9 | 27 | 52.5 | 36 | 40 | 57 * 56.5 | ~375 | 24 | 15-32 | 3 | 8 | 33.929201 | 14 | CAN, CANFD | Magnético, Dual | Integrado | 0.88 | 360 | 0.00485 | 2.00E-05 | 4.074 | 10.261194 | 9.59E-05 | 12.5 | 8 | 28 | 81.197186 |
| J4340P-2EC(48V) | 9 | 27 | 100 | 36 | 40 | 57 * 56.5 | ~375 | 48 | 15-52 | 2.5 | 9 | 33.929201 | 14 | CAN, CANFD | Magnético, Dual | Integrado | 0.88 | 360 | 0.00485 | 2.00E-05 | 4.074 | 10.261194 | 9.59E-05 | 12.5 | 8 | 28 | 81.197186 |
Características Principales
- CAN BUS & CANFD
- Encoder Dual
- Alta Densidad de Torque
- Alta Precisión
- Diseño Hueco
Introducción
Preparación del Entorno Antes del Uso
Sistema Windows en PC
- Descarga las Herramientas de Depuración de Damiao.
- Descarga las Herramientas USB2CAN
Conectar el Circuito a la PC
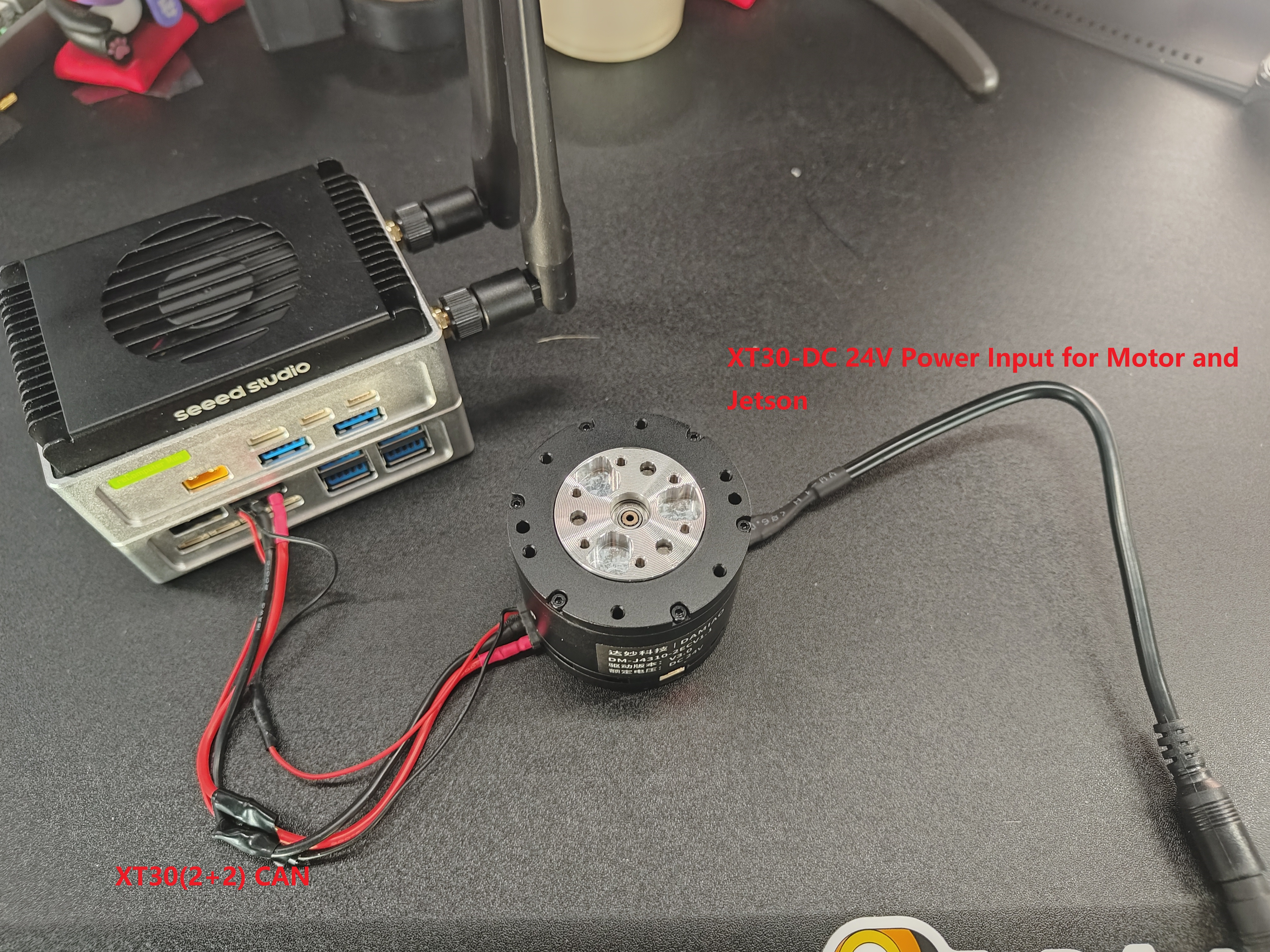
Utilizamos el método de comunicación CAN, que requiere una interfaz USB-CAN adicional para la depuración a través de una computadora superior en Windows.
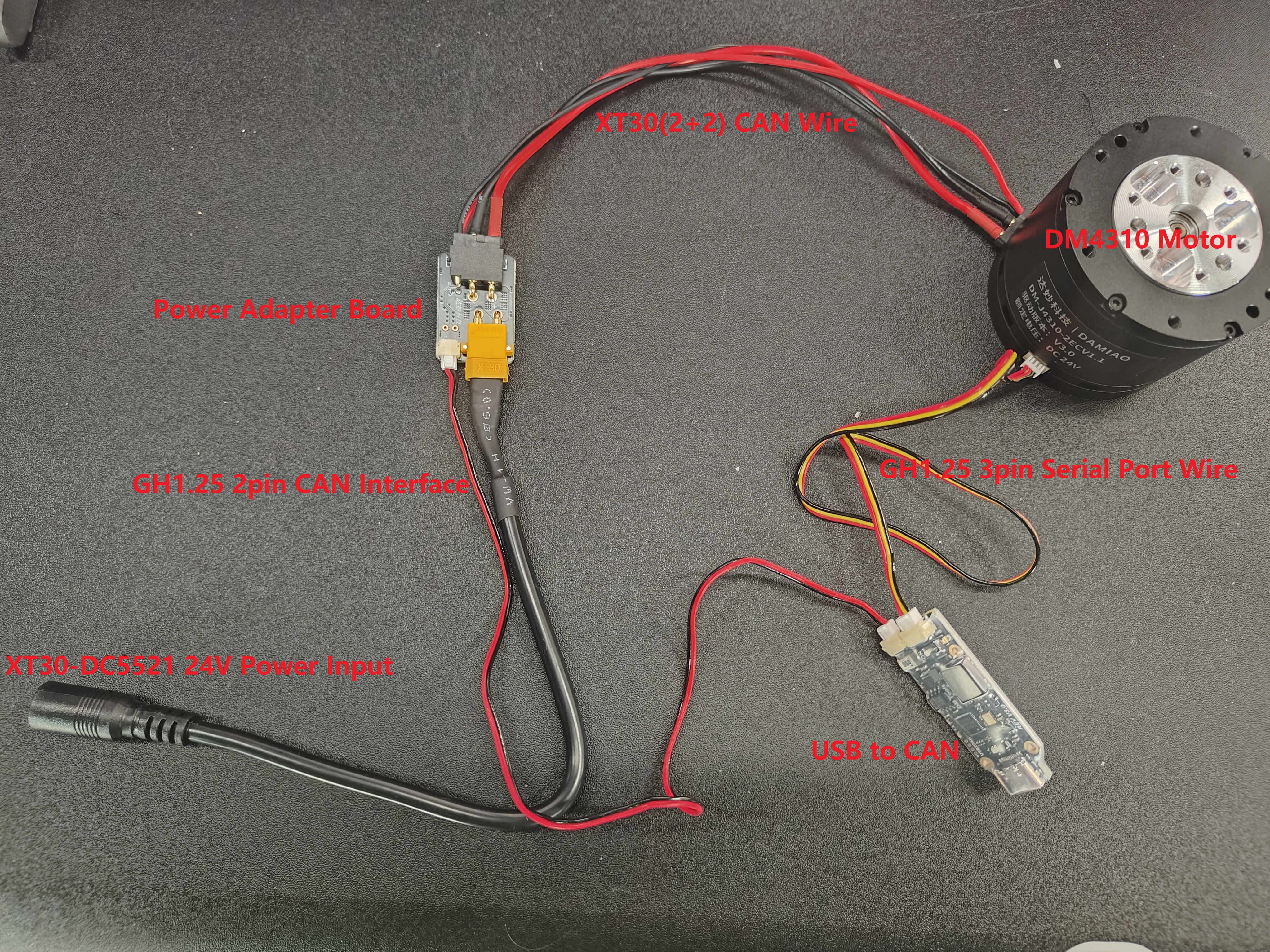
Aquí, necesitas proporcionar una fuente de alimentación de 24V separada para el motor y conectar el USB a tu computadora.
Usar el Debugging_Tools_v.1.6.8.8.exe para Probar el Motor
Puedes cambiar entre chino e inglés en la parte inferior de la aplicación.
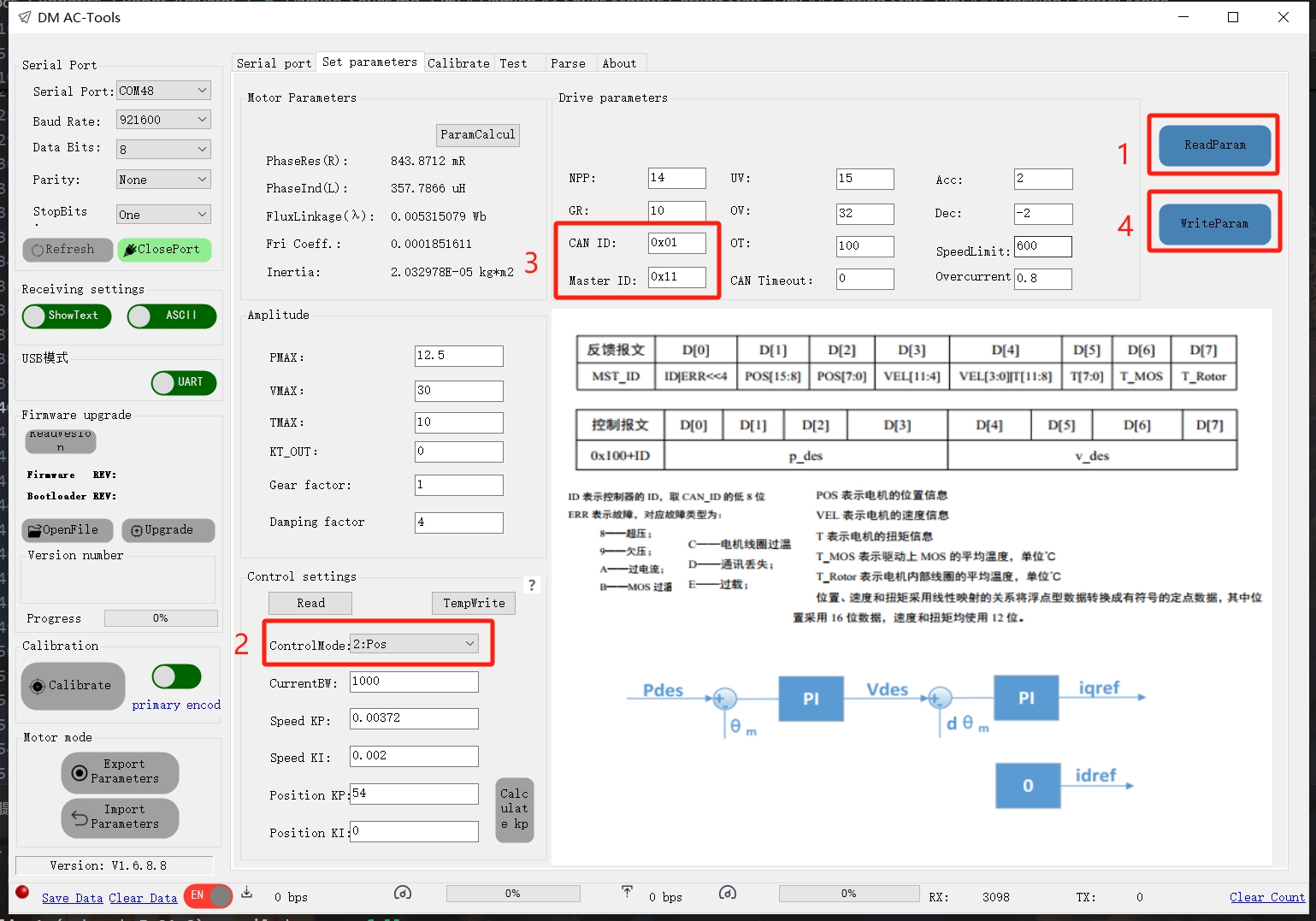
| Configurar parámetros de conexión del puerto serie | conectar al motor | Leer Parámetros | Establecer CAN ID | Escribir Parámetros |
|---|---|---|---|---|
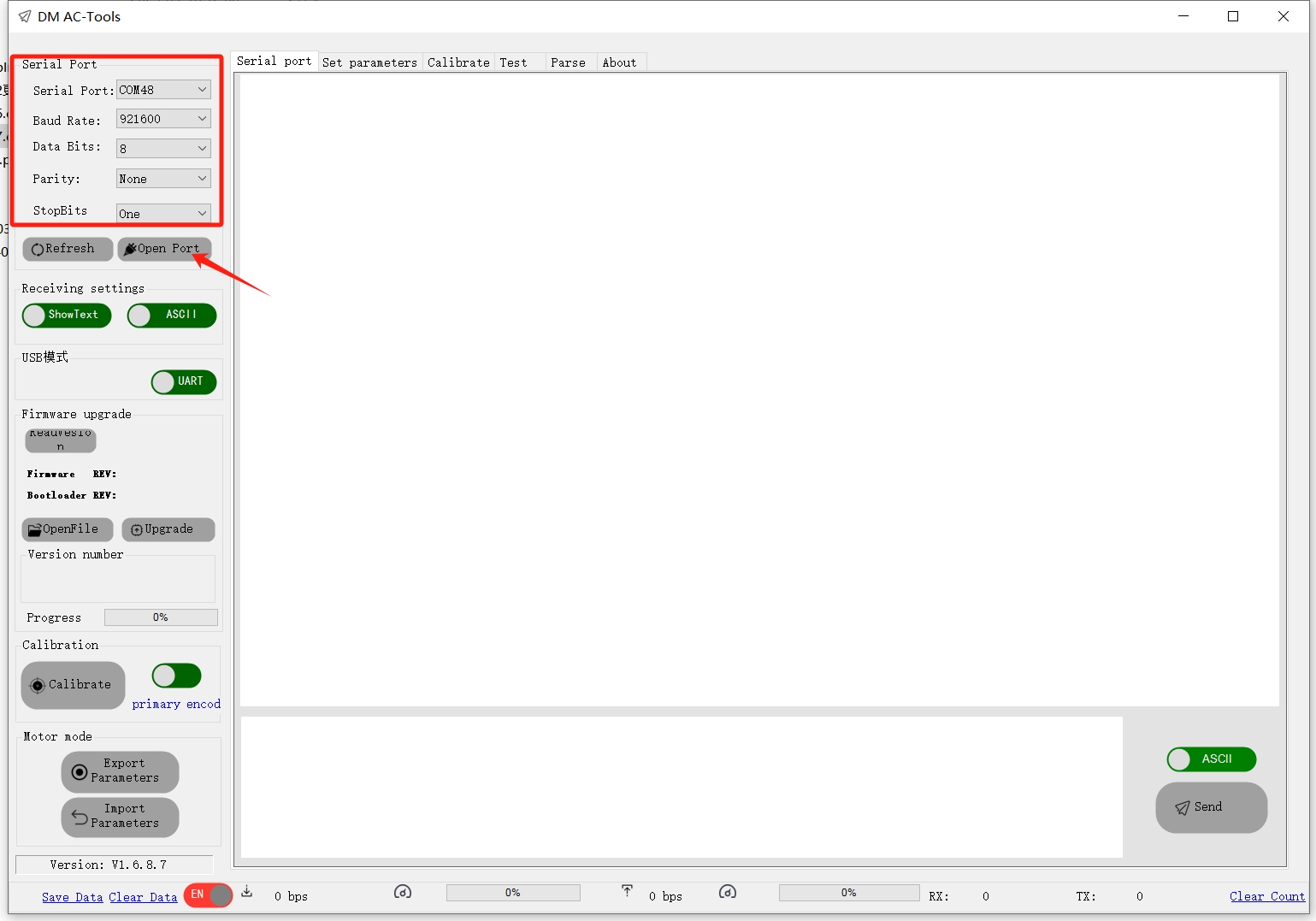 |  |  |  |  |
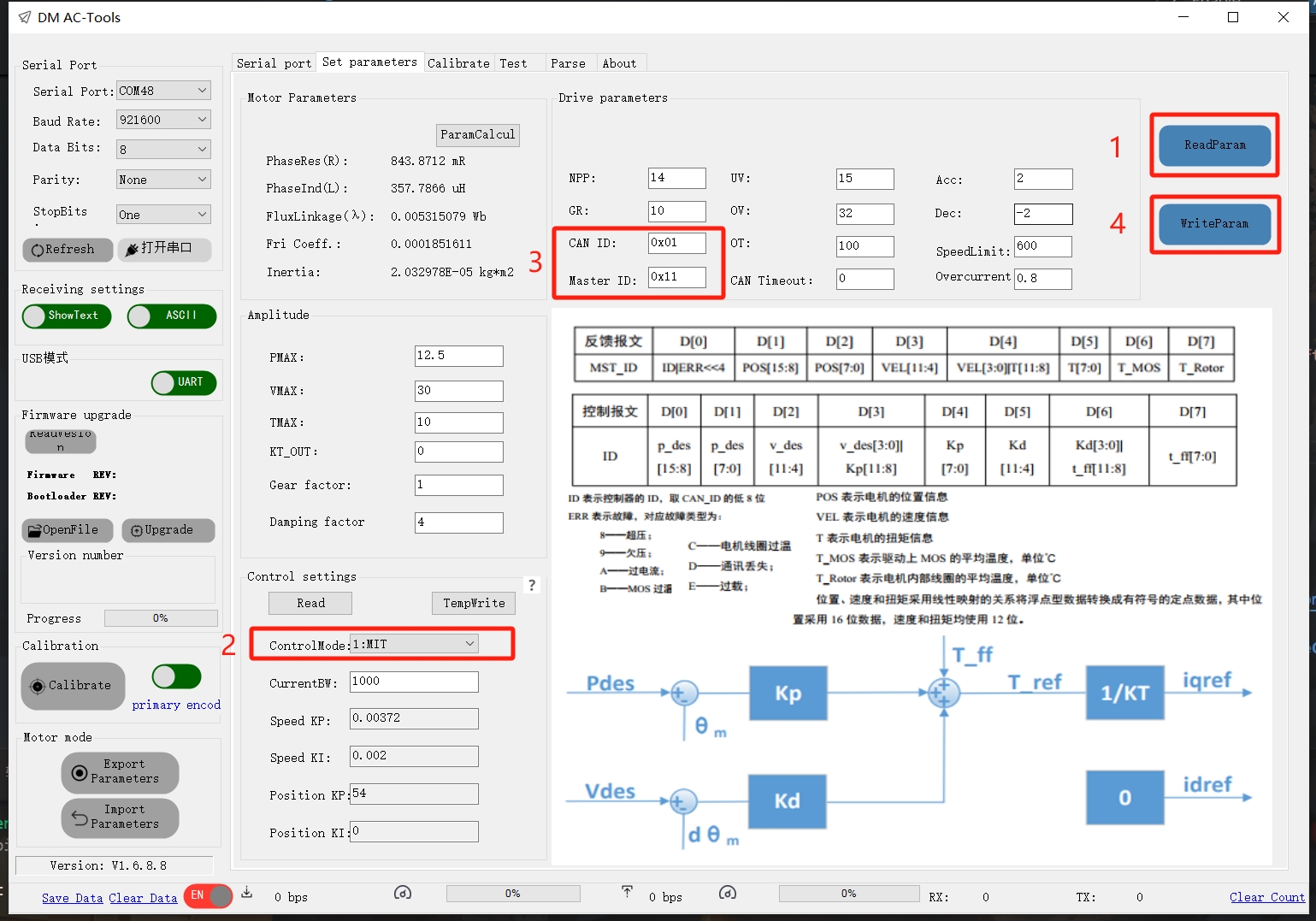
| Para el Puerto Serie, usa el puerto reconocido automáticamente por la computadora, con todas las demás configuraciones por defecto. | Después de hacer clic en el botón 'Open Port', se conectará automáticamente a la computadora host. Si esta es la primera conexión, la información del motor se imprimirá en el cuadro de diálogo | En la sección 'Set Parameters', hacer clic en 'Read Param' mostrará la información detallada actual del motor y el modo de movimiento. | Aquí, por favor primero configura el CAN ID. | Después de la configuración, haz clic en 'Write Param' para actualizar los parámetros. |
CAN_ID: El ID de trama utilizado por el driver para recibir comandos CAN (hexadecimal).
Master ID: El ID de trama utilizado por el driver para enviar retroalimentación (hexadecimal).
El Master ID es el ID del host. Se recomienda establecer Master IDs únicos para cada motor.
Una buena práctica es establecer el Master ID más alto que el CAN_ID por 0x10 (por ejemplo, si CAN_ID = 0x01, Master ID = 0x11).
Ejemplo:
Motor 1: CAN_ID = 0x01, Master ID = 0x11
Motor 2: CAN_ID = 0x02, Master ID = 0x12
¡No establezcan Master ID a 0x00!
(1) Parámetros Básicos
- NPP: El número de pares de polos del motor, determinado automáticamente a través de calibración.
- UV: Si el voltaje de alimentación cae por debajo del umbral (mínimo 15V), el driver dejará de operar.
- OV: Establece el límite superior de voltaje. El driver verifica el voltaje de alimentación al encenderse y deshabilita la operación si se excede (verificado solo una vez al inicio).
- Acc/Dec: Utilizado en modos no-MIT para limitar la tasa de cambio de velocidad.
- GR(Gear Ratio): Afecta la velocidad/posición de salida e influye indirectamente en la retroalimentación de torque. Soporta valores de punto flotante.
- OT: Umbral de temperatura de la bobina (recomendado ≤ 100°C). Exceder esto activa el modo de falla (deshabilita el motor y reporta error).
- CAN_ID: ID de trama para recibir comandos CAN (hexadecimal).
- Master ID: ID de trama para retroalimentación del driver (hexadecimal). Mejor práctica: Establecer
MasterID = CAN_ID + 0x10(por ejemplo,0x01→0x11). Nunca establecer a0x00. - CAN Timeout: Entero de 32 bits que define el período de timeout (unidades: ciclos de 50µs). El motor entra en modo de protección si no se detectan comandos CAN dentro de este intervalo.
- Speed Limit (Solo modo de velocidad): Velocidad máxima antes de la desaceleración (unidades: rad/s).
- Overcurrent: Límite máximo de corriente de fase (porcentaje).
(2) Parámetros del Motor
- Identificados automáticamente por el driver. Se requiere recalibración al reemplazar la placa del driver. Almacenados persistentemente en el driver.
(3) Escalado de Comandos (Configuraciones de Amplitud)
- PMAX: En modo MIT, escala la entrada de comando; en otros modos, escala la salida de retroalimentación. Consulta el protocolo CAN para las reglas de mapeo.
- VMAX: Igual que PMAX.
- TMAX: Igual que PMAX.
- KT_OUT: Constante de torque del motor. Establecer a 0 si los parámetros del motor están identificados con precisión.
- Gear Ratio Coefficient: Relación de transmisión de torque para engranajes.
Nota: El driver utiliza el formato de protocolo de comunicación MIT.
(4) Configuraciones de Control
- Modos de Control:
- Modo MIT
- Modo Posición-Velocidad (aceleración/desaceleración trapezoidal)
- Modo Velocidad
- Current Bandwidth: Ganancia del bucle de corriente (por defecto:
1000). - Speed KP/KI, Position KP/KI: Parámetros PID para bucles de velocidad y posición.
Modo de Control MIT
1. Modo de Control de Torque MIT:
- En la sección Set Parameters, haz clic en Read Param para mostrar los parámetros actuales del motor.
- Establece el Control Mode a MIT Mode.
- Verifica el CAN ID configurado.
- Haz clic en Write Param para guardar todas las configuraciones.
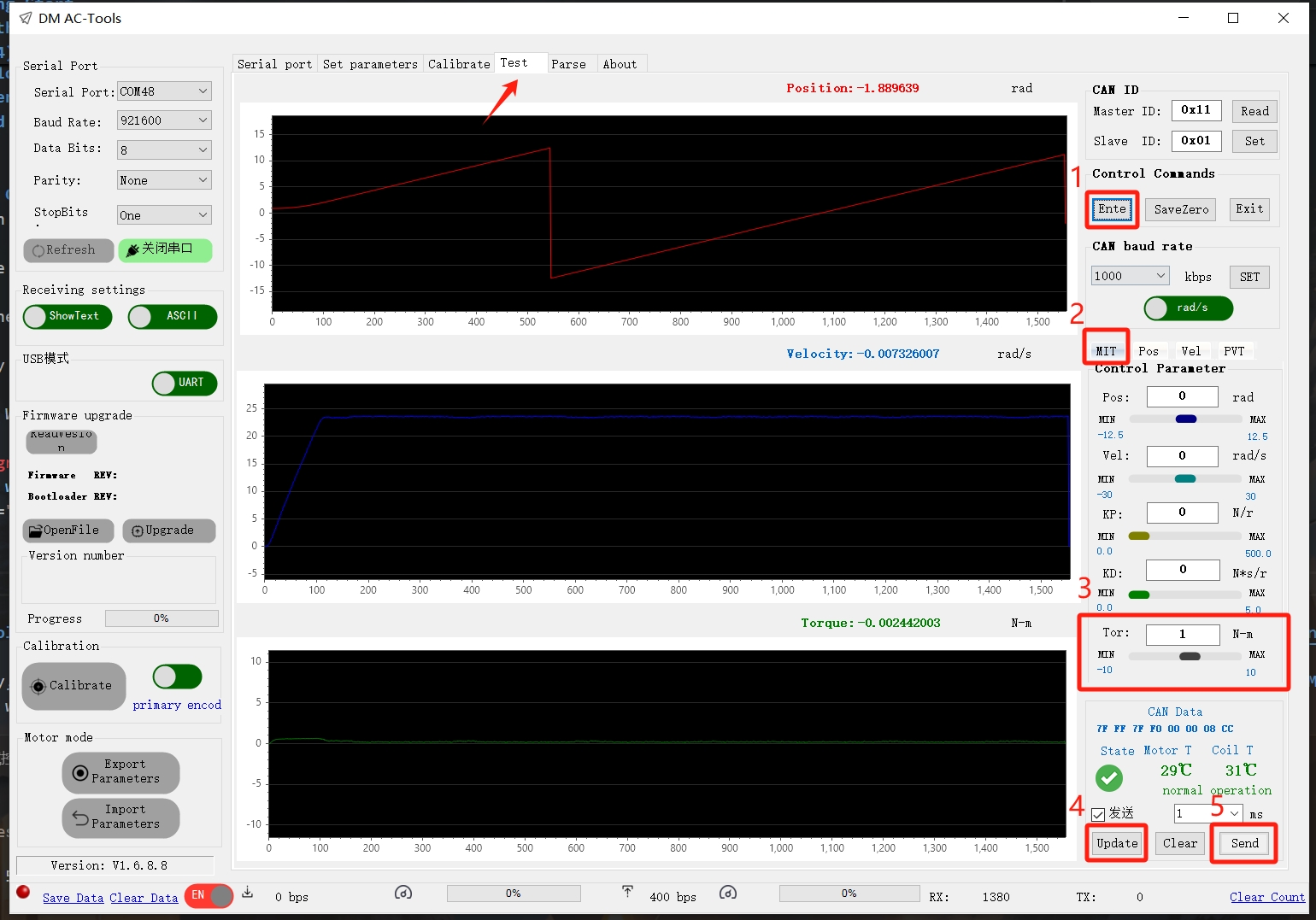
- En la pestaña Test, haz clic en el botón **"Enable Motor"** (Ente).
- En la sección MIT Control:
- Establece Torque (Nm) a 1.
- Haz clic en Update → Send.
El motor comenzará a girar.
También puedes copiar los datos CAN (en formato hexadecimal) y usar una herramienta de depuración de puerto serie para controlar el motor.

2. Modo de Control de Velocidad MIT:
- En la pestaña Test, haz clic en el botón **"Enable Motor"** (Ente).
- En la sección MIT Control:
- Establece Vel (rad/s) a 5.
- Establece KD (N*s/r) a 1.
- Haz clic en Update → Send.
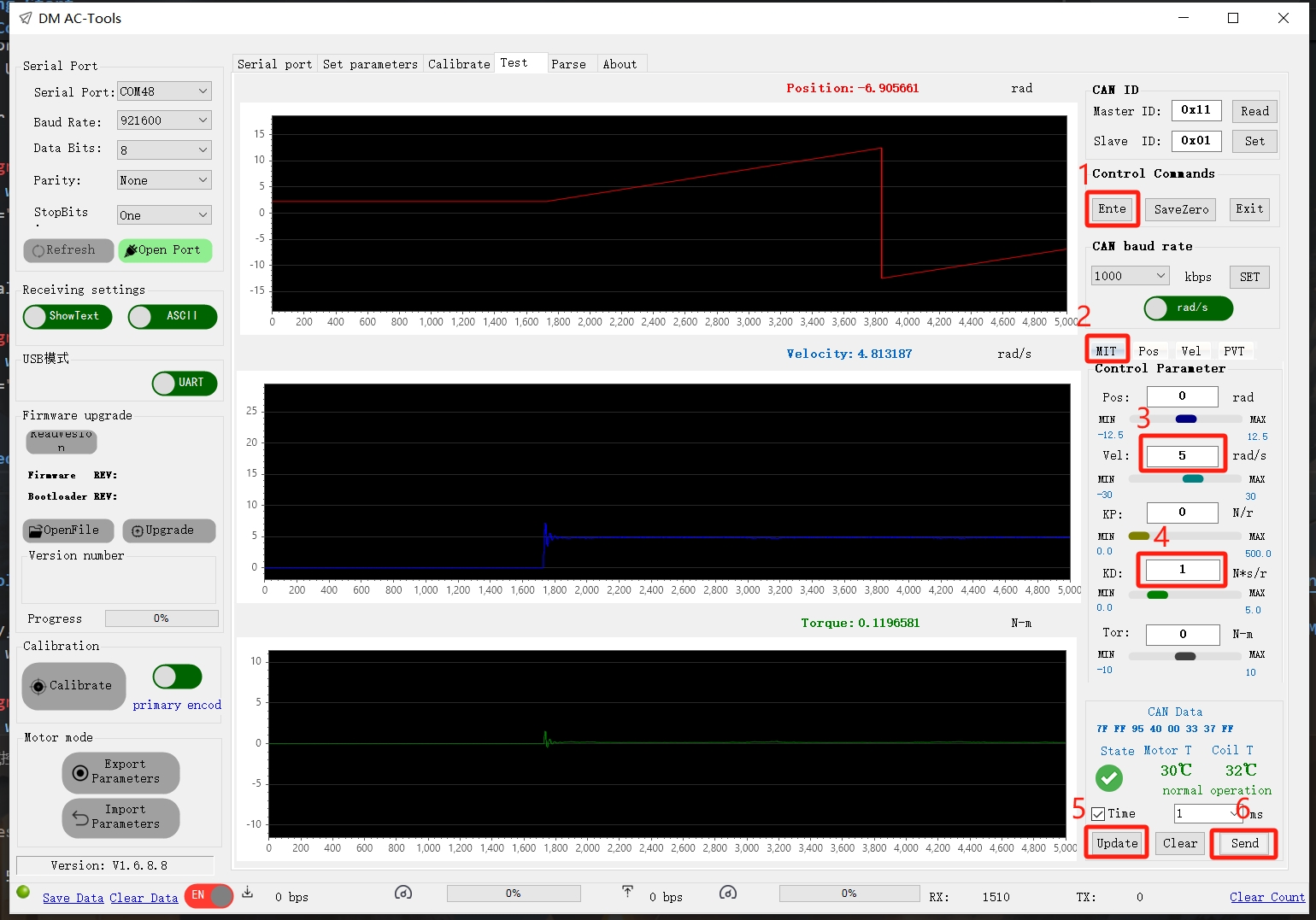
El motor comenzará a girar. También puedes copiar los datos CAN (en formato hexadecimal) y usar una herramienta de depuración de puerto serie para controlar el motor.
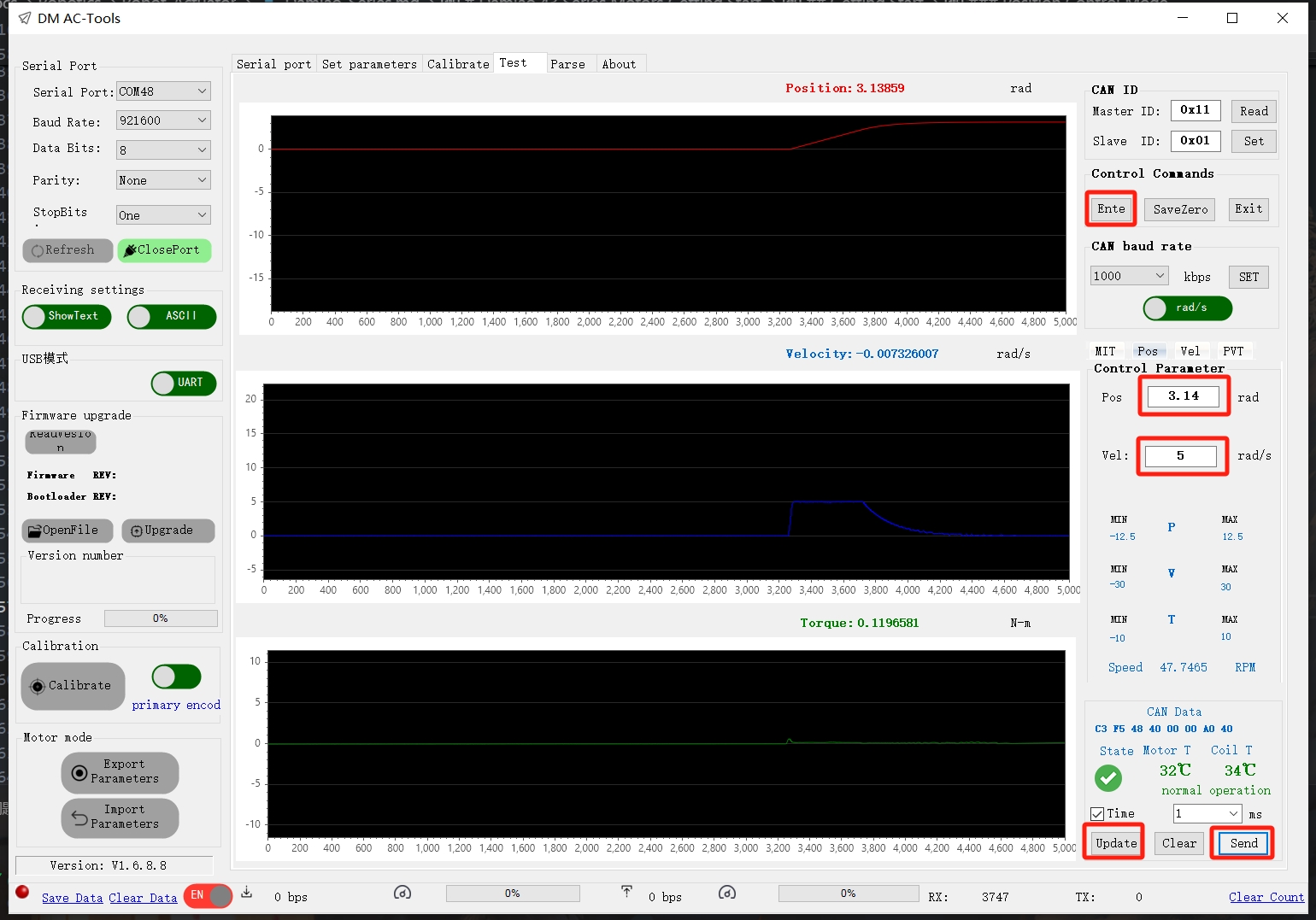
3. Modo de Control de Posición MIT:
- En la pestaña Test, haz clic en el botón **"Enable Motor"** (Ente).
- Puedes usar **"SaveZero"** para establecer la posición actual como el punto cero.
- En la sección MIT Control:
- Establece Pos (rad) a 3.14.
- Establece KP (N/r) a 2.
- Establece KD (N*s/r) a 1.
- Haz clic en Update → Send.
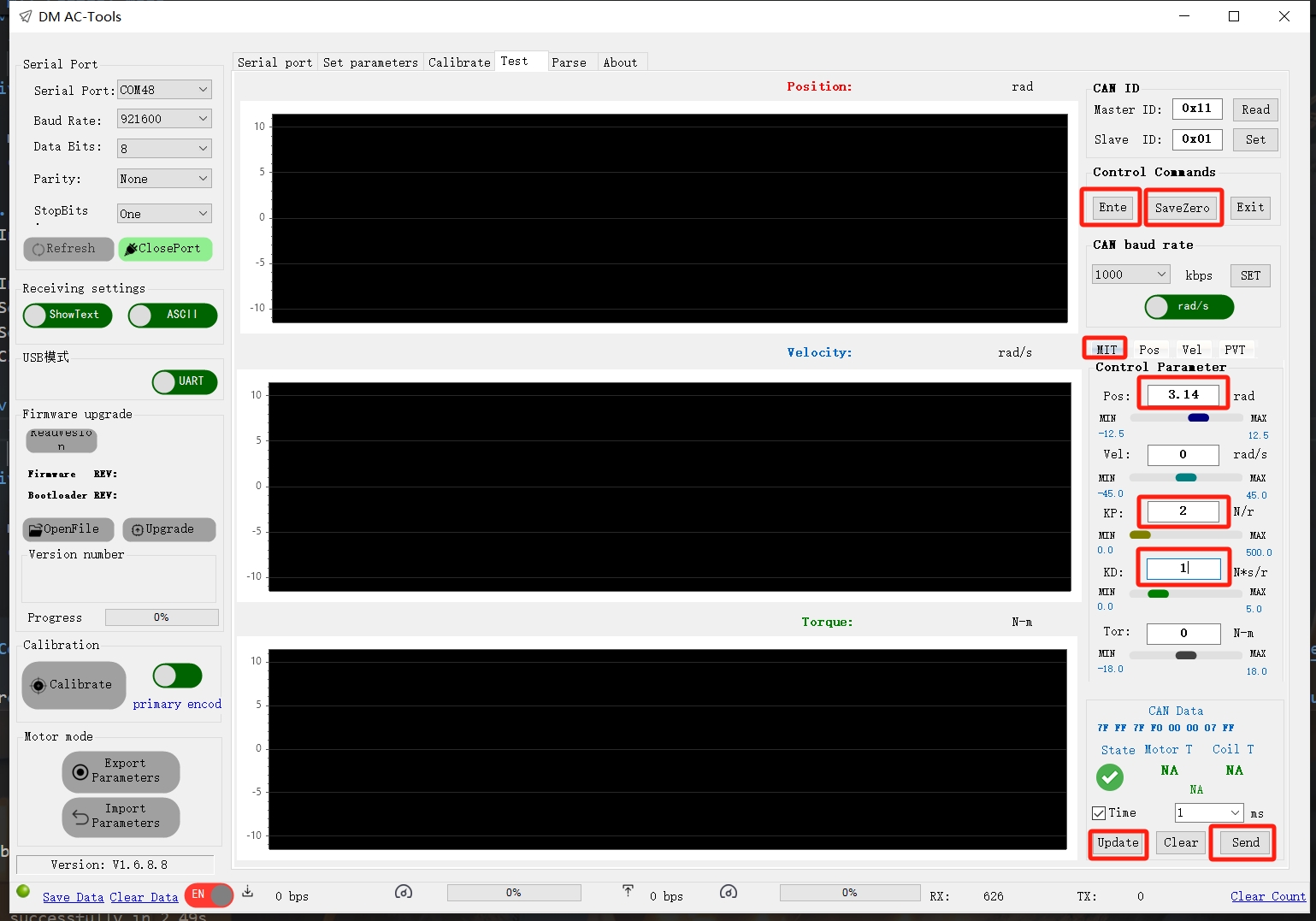
El motor comenzará a girar. También puedes copiar los datos CAN (en formato hexadecimal) y usar una herramienta de depuración de puerto serie para controlar el motor.
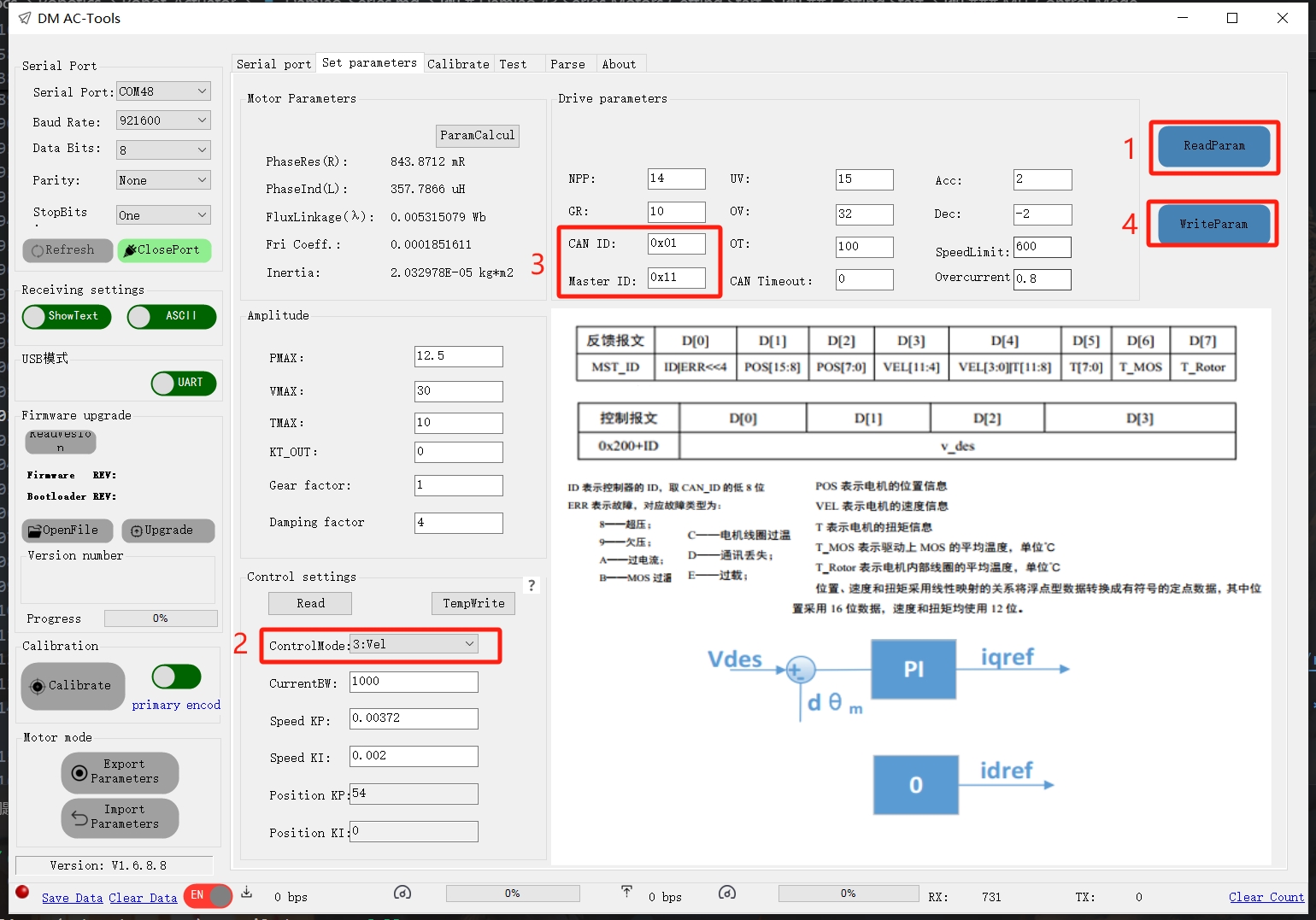
Modo de Control de Velocidad
- En la sección Set Parameters, haz clic en Read Param para mostrar los parámetros actuales del motor.
- Establece el Control Mode en Vel Mode.
- Verifica el CAN ID configurado.
- Haz clic en Write Param para guardar todas las configuraciones.
- En la pestaña Test, haz clic en el botón **"Enable Motor"** (Ente).
- En la sección Vel Control:
- Establece Vel (rad/s) en 5.
- Haz clic en Update → Send.
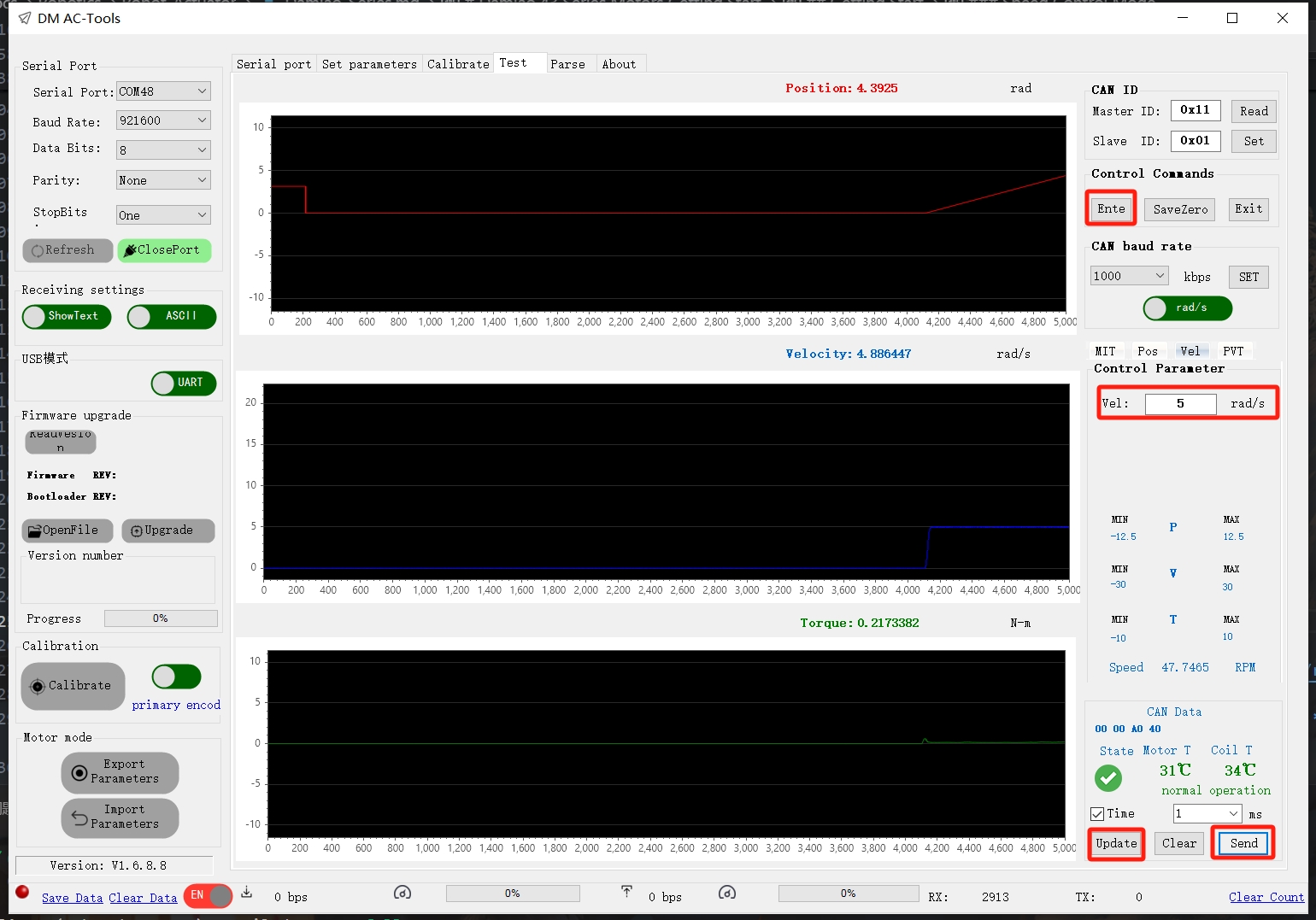
El motor comenzará a girar. También puedes copiar los datos CAN (en formato hexadecimal) y usar una herramienta de depuración de puerto serie para controlar el motor.
Modo de Control de Posición
- En la sección Set Parameters, haz clic en Read Param para mostrar los parámetros actuales del motor.
- Establece el Control Mode en Pos Mode.
- Verifica el CAN ID configurado.
- Haz clic en Write Param para guardar todas las configuraciones.
- En la pestaña Test, haz clic en el botón **"Enable Motor"** (Ente).
- En la sección Pos Control:
- Establece Pos en 3.14.
- Establece Vel (rad/s) en 5.
- Haz clic en Update → Send.
El motor comenzará a girar. También puedes copiar los datos CAN (en formato hexadecimal) y usar una herramienta de depuración de puerto serie para controlar el motor.
Controlar el Motor Usando el reComputer Mini Jetson Orin
Actualmente, las interfaces de comunicación CAN más comunes para motores en el mercado utilizan conectores XT30 (2+2) y JST. Nuestro dispositivo reComputer Mini Jetson Orin y reComputer Robotics está equipado con puertos duales XT30 (2+2) e interfaces CAN basadas en JST, proporcionando compatibilidad perfecta.
reComputer Mini:

reComputer Robotics

Para más detalles sobre el uso de CAN, puedes consultar esta wiki.
Habilitar Interfaces CAN
Paso1: Antes de usar CAN0 y CAN1, por favor retira la cubierta inferior y establece ambas resistencias de terminación de 120Ω en la posición ON.

Paso2: Conecta el motor directamente al CAN0 del reComputer Mini a través de la interfaz XT30 (2+2).
Para la interfaz CAN del reComputer Mini, los pines H/L están invertidos en comparación con los H/L del motor. Por lo tanto, necesitas invertir las conexiones H/L en el arnés de cables XT30 2+2.

Esta fuente de alimentación es solo para aprendizaje y pruebas de un solo motor. Para múltiples motores, por favor diseña una placa de alimentación separada y aísla la fuente de alimentación del Jetson de la fuente de alimentación del motor para evitar que pase alta corriente directamente a través del Jetson.
Habilitar comunicación CAN del Jetson
Abre una terminal e ingresa el siguiente comando para poner el pin GPIO en alto y activar CAN0:
gpioset --mode=wait 0 43=0
Si estás usando la interfaz JST CAN1, pon el pin 106 en alto.
gpioset --mode=wait 0 106=0
Mantén esta terminal abierta, lanza una nueva terminal y configura CAN0.
sudo modprobe mttcan
sudo ip link set can0 type can bitrate 1000000
sudo ip link set can0 up
Para Ejemplos en C++
Instalación y Compilación
- Instalar CMake
sudo apt update
sudo apt install cmake
- Instalar Herramientas CAN
sudo apt install can-utils
- Descargar y Compilar el Programa
- Crear un espacio de trabajo y clonar el repositorio:
mkdir -p ~/orin_ws/src
cd ~/orin_ws/src
git clone https://gitee.com/xauter/orin-control.git
- Compilar:
cd ~/orin_ws/src/orin-control/dm_hw
mkdir build
cd build
cmake ..
make
Uso
- Verificar Dispositivos CAN
Abre una terminal y ejecuta:
ip -brief link | grep can
- Ejecutar el Programa
En la carpeta build, ejecuta:
cd ~/orin_ws/src/orin-control/dm_hw/build
./dm_main
El motor se iluminará en verde y girará a una velocidad sinusoidal.
Control Usando Python
- Instalar Entorno Python
pip install python-can numpy
- Crear una carpeta llamada scripts bajo el directorio
~/damiao/scriptspara almacenar scripts de Python.
mkdir -p ~/damiao/scripts
- Crear el archivo damiao_motor.py
cd ~/damiao/scripts
touch damiao_motor.py
Copia el siguiente código a damiao_motor.py
damiao_motor.py
## This is a derivative of the following software.
## https://github.com/cmjang/DM_Control_Python/blob/main/DM_CAN.py
import can
from time import sleep, time
import numpy as np
from enum import IntEnum
from struct import unpack
from struct import pack
class Motor:
def __init__(self, MotorType, SlaveID, MasterID):
"""
define Motor object 定义电机对象
:param MotorType: Motor type 电机类型
:param SlaveID: CANID 电机ID
:param MasterID: MasterID 主机ID 建议不要设为0
"""
self.Pd = float(0)
self.Vd = float(0)
self.goal_position = float(0)
self.goal_tau = float(0)
self.state_q = float(0)
self.state_dq = float(0)
self.state_tau = float(0)
self.state_tmos = int(0)
self.state_trotor = int(0)
self.SlaveID = SlaveID
self.MasterID = MasterID
self.MotorType = MotorType
self.isEnable = False
self.NowControlMode = Control_Type.MIT
self.temp_param_dict = {}
def recv_data(self, q: float, dq: float, tau: float, tmos: int, trotor: int):
self.state_q = q
self.state_dq = dq
self.state_tau = tau
self.state_tmos = tmos
self.state_trotor = trotor
def getPosition(self):
"""
get the position of the motor 获取电机位置
:return: the position of the motor 电机位置
"""
return self.state_q
def getVelocity(self):
"""
get the velocity of the motor 获取电机速度
:return: the velocity of the motor 电机速度
"""
return self.state_dq
def getTorque(self):
"""
get the torque of the motor 获取电机力矩
:return: the torque of the motor 电机力矩
"""
return self.state_tau
def getParam(self, RID):
"""
get the parameter of the motor 获取电机内部的参数,需要提前读取
:param RID: DM_variable 电机参数
:return: the parameter of the motor 电机参数
"""
if RID in self.temp_param_dict:
return self.temp_param_dict[RID]
else:
return None
class MotorControl:
#send_data_frame = np.array(
# [0x55, 0xAA, 0x1e, 0x03, 0x01, 0x00, 0x00, 0x00, 0x0a, 0x00, 0x00, 0x00, 0x00, 0, 0, 0, 0, 0x00, 0x08, 0x00,
# 0x00, 0, 0, 0, 0, 0, 0, 0, 0, 0x00], np.uint8)
# 4310 4310_48 4340 4340_48
Limit_Param = [[12.5, 30, 10], [12.5, 50, 10], [12.5, 8, 28], [12.5, 10, 28],
# 6006 8006 8009 10010L 10010
[12.5, 45, 20], [12.5, 45, 40], [12.5, 45, 54], [12.5, 25, 200], [12.5, 20, 200],
# H3510 DMG62150 DMH6220
[12.5 , 280 , 1],[12.5 , 45 , 10],[12.5 , 45 , 10]]
def __init__(self, channel: str, bitrate: int = 1000000):
"""
define MotorControl object 定义电机控制对象
:param serial_device: serial object 串口对象
"""
#self.serial_ = serial_device
self.motors_map = dict()
self.data_save = bytes() # save data
#if self.serial_.is_open: # open the serial port
# print("Serial port is open")
# serial_device.close()
#self.serial_.open()
self.canbus = can.interface.Bus(channel=channel, interface='socketcan', bitrate=bitrate)
#print("can is open")
def controlMIT(self, DM_Motor, kp: float, kd: float, q: float, dq: float, tau: float):
"""
MIT Control Mode Function 达妙电机MIT控制模式函数
:param DM_Motor: Motor object 电机对象
:param kp: kp
:param kd: kd
:param q: position 期望位置
:param dq: velocity 期望速度
:param tau: torque 期望力矩
:return: None
"""
if DM_Motor.SlaveID not in self.motors_map:
print("controlMIT ERROR : Motor ID not found")
return
kp_uint = float_to_uint(kp, 0, 500, 12)
kd_uint = float_to_uint(kd, 0, 5, 12)
MotorType = DM_Motor.MotorType
Q_MAX = self.Limit_Param[MotorType][0]
DQ_MAX = self.Limit_Param[MotorType][1]
TAU_MAX = self.Limit_Param[MotorType][2]
q_uint = float_to_uint(q, -Q_MAX, Q_MAX, 16)
dq_uint = float_to_uint(dq, -DQ_MAX, DQ_MAX, 12)
tau_uint = float_to_uint(tau, -TAU_MAX, TAU_MAX, 12)
data_buf = np.array([0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
data_buf[0] = (q_uint >> 8) & 0xff
data_buf[1] = q_uint & 0xff
data_buf[2] = dq_uint >> 4
data_buf[3] = ((dq_uint & 0xf) << 4) | ((kp_uint >> 8) & 0xf)
data_buf[4] = kp_uint & 0xff
data_buf[5] = kd_uint >> 4
data_buf[6] = ((kd_uint & 0xf) << 4) | ((tau_uint >> 8) & 0xf)
data_buf[7] = tau_uint & 0xff
self.__send_data(DM_Motor.SlaveID, data_buf)
self.recv() # receive the data from serial port
def control_delay(self, DM_Motor, kp: float, kd: float, q: float, dq: float, tau: float, delay: float):
"""
MIT Control Mode Function with delay 达妙电机MIT控制模式函数带延迟
:param DM_Motor: Motor object 电机对象
:param kp: kp
:param kd: kd
:param q: position 期望位置
:param dq: velocity 期望速度
:param tau: torque 期望力矩
:param delay: delay time 延迟时间 单位秒
"""
self.controlMIT(DM_Motor, kp, kd, q, dq, tau)
sleep(delay)
def control_Pos_Vel(self, Motor, P_desired: float, V_desired: float):
"""
control the motor in position and velocity control mode 电机位置速度控制模式
:param Motor: Motor object 电机对象
:param P_desired: desired position 期望位置
:param V_desired: desired velocity 期望速度
:return: None
"""
if Motor.SlaveID not in self.motors_map:
print("Control Pos_Vel Error : Motor ID not found")
return
motorid = 0x100 + Motor.SlaveID
data_buf = np.array([0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
P_desired_uint8s = float_to_uint8s(P_desired)
V_desired_uint8s = float_to_uint8s(V_desired)
data_buf[0:4] = P_desired_uint8s
data_buf[4:8] = V_desired_uint8s
self.__send_data(motorid, data_buf)
self.recv() # receive the data from serial port
def control_Vel(self, Motor, Vel_desired):
"""
control the motor in velocity control mode 电机速度控制模式
:param Motor: Motor object 电机对象
:param Vel_desired: desired velocity 期望速度
"""
if Motor.SlaveID not in self.motors_map:
print("control_VEL ERROR : Motor ID not found")
return
motorid = 0x200 + Motor.SlaveID
data_buf = np.array([0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
Vel_desired_uint8s = float_to_uint8s(Vel_desired)
data_buf[0:4] = Vel_desired_uint8s
self.__send_data(motorid, data_buf)
self.recv() # receive the data from serial port
def control_pos_force(self, Motor, Pos_des: float, Vel_des, i_des):
"""
control the motor in EMIT control mode 电机力位混合模式
:param Pos_des: desired position rad 期望位置 单位为rad
:param Vel_des: desired velocity rad/s 期望速度 为放大100倍
:param i_des: desired current rang 0-10000 期望电流标幺值放大10000倍
电流标幺值:实际电流值除以最大电流值,最大电流见上电打印
"""
if Motor.SlaveID not in self.motors_map:
print("control_pos_vel ERROR : Motor ID not found")
return
motorid = 0x300 + Motor.SlaveID
data_buf = np.array([0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
Pos_desired_uint8s = float_to_uint8s(Pos_des)
data_buf[0:4] = Pos_desired_uint8s
Vel_uint = np.uint16(Vel_des)
ides_uint = np.uint16(i_des)
data_buf[4] = Vel_uint & 0xff
data_buf[5] = Vel_uint >> 8
data_buf[6] = ides_uint & 0xff
data_buf[7] = ides_uint >> 8
self.__send_data(motorid, data_buf)
self.recv() # receive the data from serial port
def enable(self, Motor):
"""
enable motor 使能电机
最好在上电后几秒后再使能电机
:param Motor: Motor object 电机对象
"""
self.__control_cmd(Motor, np.uint8(0xFC))
sleep(0.1)
self.recv() # receive the data from serial port
def enable_old(self, Motor ,ControlMode):
"""
enable motor old firmware 使能电机旧版本固件,这个是为了旧版本电机固件的兼容性
可恶的旧版本固件使能需要加上偏移量
最好在上电后几秒后再使能电机
:param Motor: Motor object 电机对象
"""
data_buf = np.array([0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xfc], np.uint8)
enable_id = ((int(ControlMode)-1) << 2) + Motor.SlaveID
self.__send_data(enable_id, data_buf)
sleep(0.1)
self.recv() # receive the data from serial port
def disable(self, Motor):
"""
disable motor 失能电机
:param Motor: Motor object 电机对象
"""
self.__control_cmd(Motor, np.uint8(0xFD))
sleep(0.1)
self.recv() # receive the data from serial port
def set_zero_position(self, Motor):
"""
set the zero position of the motor 设置电机0位
:param Motor: Motor object 电机对象
"""
self.__control_cmd(Motor, np.uint8(0xFE))
sleep(0.1)
self.recv() # receive the data from serial port
def recv(self):
# 把上次没有解析完的剩下的也放进来
# data_recv = b''.join([self.data_save, self.serial_.read_all()])
#data_recv = b''.join([self.data_save, self.canbus.recv()])
# packets = self.__extract_packets(data_recv)
# for packet in packets:
# data = packet[7:15]
# CANID = (packet[6] << 24) | (packet[5] << 16) | (packet[4] << 8) | packet[3]
# CMD = packet[1]
# self.__process_packet(data, CANID, CMD)
data_recv = self.canbus.recv(0.1)
if data_recv is not None:
# data = data_recv.data
# err = data[0] >> 12
# id = data[0] & 0x7f
# pos = (data[1] << 8) + data[2]
# vel = (data[3] << 4) + (data[4] >> 4)
# tau = ((data[4] & 0x0f) << 8) + data[5]
# t_mos = data[6]
# t_rotor = data[7]
# print(hex(id), err, id, pos, vel, tau, goal_tau, t_mos, t_rotor)
# CANID = data_recv.arbitration_id
CANID = data_recv.data[0]
# CMD = data_recv.data[3]
CMD = 0x11 # 飯田:修正の必要あり
self.__process_packet(data_recv.data, CANID, CMD)
# 飯田:Debug print
# print(hex(CANID),hex(CMD))
# print(hex(data_recv.data[0]),hex(data_recv.data[1]),hex(data_recv.data[2]),hex(data_recv.data[3]),hex(data_recv.data[4]),hex(data_recv.data[5]),hex(data_recv.data[6]),hex(data_recv.data[7]))
#return data
def recv_set_param_data(self):
#data_recv = self.serial_.read_all()
# packets = self.__extract_packets(data_recv)
# for packet in packets:
# data = packet[7:15]
# CANID = (packet[6] << 24) | (packet[5] << 16) | (packet[4] << 8) | packet[3]
# CMD = packet[1]
# self.__process_set_param_packet(data, CANID, CMD)
data_recv = self.canbus.recv(0.1)
if data_recv is not None:
data = data_recv.data
CANID = data_recv.arbitration_id
# CANID = data_recv.data[0]
# CMD = data_recv.data[3]
CMD = 0x11 # 飯田:修正の必要あり
self.__process_packet(data, CANID, CMD)
# 飯田:Debug print
print(hex(CANID),hex(CMD))
print(hex(data_recv.data[0]),hex(data_recv.data[1]),hex(data_recv.data[2]),hex(data_recv.data[3]),hex(data_recv.data[4]),hex(data_recv.data[5]),hex(data_recv.data[6]),hex(data_recv.data[7]))
def __process_packet(self, data, CANID, CMD):
if CMD == 0x11:
if CANID != 0x00:
if CANID in self.motors_map:
q_uint = np.uint16((np.uint16(data[1]) << 8) | data[2])
dq_uint = np.uint16((np.uint16(data[3]) << 4) | (data[4] >> 4))
tau_uint = np.uint16(((data[4] & 0xf) << 8) | data[5])
t_mos = data[6]
t_rotor = data[7]
MotorType_recv = self.motors_map[CANID].MotorType
Q_MAX = self.Limit_Param[MotorType_recv][0]
DQ_MAX = self.Limit_Param[MotorType_recv][1]
TAU_MAX = self.Limit_Param[MotorType_recv][2]
recv_q = uint_to_float(q_uint, -Q_MAX, Q_MAX, 16)
recv_dq = uint_to_float(dq_uint, -DQ_MAX, DQ_MAX, 12)
recv_tau = uint_to_float(tau_uint, -TAU_MAX, TAU_MAX, 12)
self.motors_map[CANID].recv_data(recv_q, recv_dq, recv_tau, t_mos, t_rotor)
else:
MasterID=data[0] & 0x0f
if MasterID in self.motors_map:
q_uint = np.uint16((np.uint16(data[1]) << 8) | data[2])
dq_uint = np.uint16((np.uint16(data[3]) << 4) | (data[4] >> 4))
tau_uint = np.uint16(((data[4] & 0xf) << 8) | data[5])
t_mos = data[6]
t_rotor = data[7]
MotorType_recv = self.motors_map[MasterID].MotorType
Q_MAX = self.Limit_Param[MotorType_recv][0]
DQ_MAX = self.Limit_Param[MotorType_recv][1]
TAU_MAX = self.Limit_Param[MotorType_recv][2]
recv_q = uint_to_float(q_uint, -Q_MAX, Q_MAX, 16)
recv_dq = uint_to_float(dq_uint, -DQ_MAX, DQ_MAX, 12)
recv_tau = uint_to_float(tau_uint, -TAU_MAX, TAU_MAX, 12)
self.motors_map[MasterID].recv_data(recv_q, recv_dq, recv_tau, t_mos, t_rotor)
def __process_set_param_packet(self, data, CANID, CMD):
if CMD == 0x11 and (data[2] == 0x33 or data[2] == 0x55):
masterid=CANID
slaveId = ((data[1] << 8) | data[0])
if CANID==0x00: #防止有人把MasterID设为0稳一手
masterid=slaveId
if masterid not in self.motors_map:
if slaveId not in self.motors_map:
return
else:
masterid=slaveId
RID = data[3]
# 读取参数得到的数据
if is_in_ranges(RID):
#uint32类型
num = uint8s_to_uint32(data[4], data[5], data[6], data[7])
self.motors_map[masterid].temp_param_dict[RID] = num
else:
#float类型
num = uint8s_to_float(data[4], data[5], data[6], data[7])
self.motors_map[masterid].temp_param_dict[RID] = num
def addMotor(self, Motor):
"""
add motor to the motor control object 添加电机到电机控制对象
:param Motor: Motor object 电机对象
"""
self.motors_map[Motor.SlaveID] = Motor
if Motor.MasterID != 0:
self.motors_map[Motor.MasterID] = Motor
return True
def __control_cmd(self, Motor, cmd: np.uint8): # 飯田:コマンドは通ります
data_buf = np.array([0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, cmd], np.uint8)
self.__send_data(Motor.SlaveID, data_buf)
def __send_data(self, motor_id, data):
"""
send data to the motor 发送数据到电机
:param motor_id:
:param data:
:return:
"""
#self.send_data_frame[13] = motor_id & 0xff
#self.send_data_frame[14] = (motor_id >> 8)& 0xff #id high 8 bits
#self.send_data_frame[21:29] = data
#self.serial_.write(bytes(self.send_data_frame.T))
msg =can.Message(is_extended_id=False,arbitration_id=motor_id,data=data,is_remote_frame = False)
self.canbus.send(msg)
def __read_RID_param(self, Motor, RID): # 飯田:修正の必要あり?
can_id_l = Motor.SlaveID & 0xff #id low 8 bits
can_id_h = (Motor.SlaveID >> 8)& 0xff #id high 8 bits
data_buf = np.array([np.uint8(can_id_l), np.uint8(can_id_h), 0x33, np.uint8(RID), 0x00, 0x00, 0x00, 0x00], np.uint8)
self.__send_data(0x7FF, data_buf)
def __write_motor_param(self, Motor, RID, data): # 飯田:修正の必要あり?
can_id_l = Motor.SlaveID & 0xff #id low 8 bits
can_id_h = (Motor.SlaveID >> 8)& 0xff #id high 8 bits
data_buf = np.array([np.uint8(can_id_l), np.uint8(can_id_h), 0x55, np.uint8(RID), 0x00, 0x00, 0x00, 0x00], np.uint8)
if not is_in_ranges(RID):
# data is float
data_buf[4:8] = float_to_uint8s(data)
else:
# data is int
data_buf[4:8] = data_to_uint8s(int(data))
self.__send_data(0x7FF, data_buf)
def switchControlMode(self, Motor, ControlMode):
"""
switch the control mode of the motor 切换电机控制模式
:param Motor: Motor object 电机对象
:param ControlMode: Control_Type 电机控制模式 example:MIT:Control_Type.MIT MIT模式
"""
max_retries = 20
retry_interval = 0.1 #retry times
RID = 10
self.__write_motor_param(Motor, RID, np.uint8(ControlMode))
for _ in range(max_retries):
sleep(retry_interval)
self.recv_set_param_data()
if Motor.SlaveID in self.motors_map:
if RID in self.motors_map[Motor.SlaveID].temp_param_dict:
if abs(self.motors_map[Motor.SlaveID].temp_param_dict[RID] - ControlMode) < 0.1:
return True
else:
return False
return False
def save_motor_param(self, Motor):
"""
save the all parameter to flash 保存所有电机参数
:param Motor: Motor object 电机对象
:return:
"""
can_id_l = Motor.SlaveID & 0xff #id low 8 bits
can_id_h = (Motor.SlaveID >> 8)& 0xff #id high 8 bits
data_buf = np.array([np.uint8(can_id_l), np.uint8(can_id_h), 0xAA, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
self.disable(Motor) # before save disable the motor
self.__send_data(0x7FF, data_buf)
sleep(0.001)
def change_limit_param(self, Motor_Type, PMAX, VMAX, TMAX):
"""
change the PMAX VMAX TMAX of the motor 改变电机的PMAX VMAX TMAX
:param Motor_Type:
:param PMAX: 电机的PMAX
:param VMAX: 电机的VMAX
:param TMAX: 电机的TMAX
:return:
"""
self.Limit_Param[Motor_Type][0] = PMAX
self.Limit_Param[Motor_Type][1] = VMAX
self.Limit_Param[Motor_Type][2] = TMAX
def refresh_motor_status(self,Motor):
"""
get the motor status 获得电机状态
"""
can_id_l = Motor.SlaveID & 0xff #id low 8 bits
can_id_h = (Motor.SlaveID >> 8) & 0xff #id high 8 bits
data_buf = np.array([np.uint8(can_id_l), np.uint8(can_id_h), 0xCC, 0x00, 0x00, 0x00, 0x00, 0x00], np.uint8)
self.__send_data(0x7FF, data_buf)
self.recv() # receive the data from serial port
def change_motor_param(self, Motor, RID, data):
"""
change the RID of the motor 改变电机的参数
:param Motor: Motor object 电机对象
:param RID: DM_variable 电机参数
:param data: 电机参数的值
:return: True or False ,True means success, False means fail
"""
max_retries = 20
retry_interval = 0.05 #retry times
self.__write_motor_param(Motor, RID, data)
for _ in range(max_retries):
self.recv_set_param_data()
if Motor.SlaveID in self.motors_map and RID in self.motors_map[Motor.SlaveID].temp_param_dict:
if abs(self.motors_map[Motor.SlaveID].temp_param_dict[RID] - data) < 0.1:
return True
else:
return False
sleep(retry_interval)
return False
def read_motor_param(self, Motor, RID):
"""
read only the RID of the motor 读取电机的内部信息例如 版本号等
:param Motor: Motor object 电机对象
:param RID: DM_variable 电机参数
:return: 电机参数的值
"""
max_retries = 5
retry_interval = 0.05 #retry times
self.__read_RID_param(Motor, RID)
for _ in range(max_retries):
sleep(retry_interval)
self.recv_set_param_data()
if Motor.SlaveID in self.motors_map:
if RID in self.motors_map[Motor.SlaveID].temp_param_dict:
return self.motors_map[Motor.SlaveID].temp_param_dict[RID]
return None
# -------------------------------------------------
# Extract packets from the serial data
def __extract_packets(self, data):
frames = []
header = 0xAA
tail = 0x55
frame_length = 16
i = 0
remainder_pos = 0
while i <= len(data) - frame_length:
if data[i] == header and data[i + frame_length - 1] == tail:
frame = data[i:i + frame_length]
frames.append(frame)
i += frame_length
remainder_pos = i
else:
i += 1
self.data_save = data[remainder_pos:]
return frames
def LIMIT_MIN_MAX(x, min_val, max_val):
return max(min_val, min(x, max_val))
def float_to_uint(x: float, x_min: float, x_max: float, bits):
x = LIMIT_MIN_MAX(x, x_min, x_max)
span = x_max - x_min
data_norm = (x - x_min) / span
return np.uint16(data_norm * ((1 << bits) - 1))
def uint_to_float(x: np.uint16, min: float, max: float, bits):
span = max - min
data_norm = float(x) / ((1 << bits) - 1)
temp = data_norm * span + min
return np.float32(temp)
def float_to_uint8s(value):
# Pack the float into 4 bytes
packed = pack('f', value)
# Unpack the bytes into four uint8 values
return unpack('4B', packed)
def data_to_uint8s(value):
# Check if the value is within the range of uint32
if isinstance(value, int) and (0 <= value <= 0xFFFFFFFF):
# Pack the uint32 into 4 bytes
packed = pack('I', value)
else:
raise ValueError("Value must be an integer within the range of uint32")
# Unpack the bytes into four uint8 values
return unpack('4B', packed)
def is_in_ranges(number):
"""
check if the number is in the range of uint32
:param number:
:return:
"""
if (7 <= number <= 10) or (13 <= number <= 16) or (35 <= number <= 36):
return True
return False
def uint8s_to_uint32(byte1, byte2, byte3, byte4):
# Pack the four uint8 values into a single uint32 value in little-endian order
packed = pack('<4B', byte1, byte2, byte3, byte4)
# Unpack the packed bytes into a uint32 value
return unpack('<I', packed)[0]
def uint8s_to_float(byte1, byte2, byte3, byte4):
# Pack the four uint8 values into a single float value in little-endian order
packed = pack('<4B', byte1, byte2, byte3, byte4)
# Unpack the packed bytes into a float value
return unpack('<f', packed)[0]
def print_hex(data):
hex_values = [f'{byte:02X}' for byte in data]
print(' '.join(hex_values))
def get_enum_by_index(index, enum_class):
try:
return enum_class(index)
except ValueError:
return None
class DM_Motor_Type(IntEnum):
DM4310 = 0
DM4310_48V = 1
DM4340 = 2
DM4340_48V = 3
DM6006 = 4
DM8006 = 5
DM8009 = 6
DM10010L = 7
DM10010 = 8
DMH3510 = 9
DMH6215 = 10
DMG6220 = 11
class DM_variable(IntEnum):
UV_Value = 0
KT_Value = 1
OT_Value = 2
OC_Value = 3
ACC = 4
DEC = 5
MAX_SPD = 6
MST_ID = 7
ESC_ID = 8
TIMEOUT = 9
CTRL_MODE = 10
Damp = 11
Inertia = 12
hw_ver = 13
sw_ver = 14
SN = 15
NPP = 16
Rs = 17
LS = 18
Flux = 19
Gr = 20
PMAX = 21
VMAX = 22
TMAX = 23
I_BW = 24
KP_ASR = 25
KI_ASR = 26
KP_APR = 27
KI_APR = 28
OV_Value = 29
GREF = 30
Deta = 31
V_BW = 32
IQ_c1 = 33
VL_c1 = 34
can_br = 35
sub_ver = 36
u_off = 50
v_off = 51
k1 = 52
k2 = 53
m_off = 54
dir = 55
p_m = 80
xout = 81
class Control_Type(IntEnum):
MIT = 1
POS_VEL = 2
VEL = 3
Torque_Pos = 4
class DamiaoPort:
def __init__(self, device, types, can_ids, master_ids, motor_with_torque, control_mode=Control_Type.MIT):
self.device = device
self.types = types
self.can_ids = can_ids
self.master_ids = master_ids
self.control = MotorControl(self.device, bitrate=4000000)
self.motors = [Motor(type, can_id, master_id) for type, can_id, master_id in zip(types, can_ids, master_ids)]
self.stat_data = []
self.stat_time = []
for motor in self.motors:
self.control.addMotor(motor)
self.control.enable(motor)
def get_present_status(self):
self.stat_time.append(time())
stat = [[
motor.goal_position,
motor.goal_tau,
motor.getPosition(),
motor.getVelocity(),
motor.getTorque(),
motor.state_tmos,
motor.state_trotor,
] for motor in self.motors]
self.stat_data.append(stat)
return stat
def save_status(self, filename):
np.savez(filename, np.array(self.stat_time), np.array(self.stat_data))
def disable(self):
for motor in self.motors:
self.control.disable(motor)
def shutdown(self):
for motor in self.motors:
self.control.controlMIT(motor, 0, 0, 0, 0, 0)
self.control.canbus.shutdown()
def set_zero_position(self):
for motor in self.motors:
self.control.disable(motor)
sleep(1)
for motor in self.motors:
self.control.set_zero_position(motor)
sleep(1)
for motor in self.motors:
self.control.enable(motor)
return 0
async def move_towards(self, goal_positions, kps, kds):
for motor, goal_position, kp, kd in zip(self.motors, goal_positions, kps, kds):
delta = goal_position - motor.getPosition()
v = motor.getVelocity()
tau = kp * delta - kd * v
motor.goal_position = goal_position
motor.goal_tau = tau
self.control.controlMIT(motor, 0, 0, 0, 0, tau)
await asyncio.sleep(0.00003)
def move_regressor_sync(self, regs, search_range, search_step, goal_positions, kps, kds):
TORQUE_SCALER=30
if len(self.stat_data) == 0:
return self.move_towards_sync(goal_positions, kps, kds)
for motor, reg, goal_position, kp, kd, stat in zip(
self.motors, regs, goal_positions, kps, kds, self.stat_data[-1]):
pos = motor.getPosition()
vel = motor.getVelocity()
delta = goal_position - pos
goal_tau = kp * delta - kd * vel
_goal_pos, _goal_tau, _pos, _vel, _tau = stat
x = np.array([[_pos, _vel, _tau, _goal_pos, _goal_tau],
[pos, vel, motor.getTorque(), goal_position, goal_tau]])
x /= np.array([[np.pi, 10, TORQUE_SCALER, np.pi, TORQUE_SCALER]])
xs = []
for tau in np.linspace(goal_tau/TORQUE_SCALER - search_range,
goal_tau/TORQUE_SCALER + search_range,
num=search_step):
x_ = x.copy()
x_[0,4] = tau
xs.append(x_.flatten())
h = reg.predict(xs)
diff = h - goal_position
tau = TORQUE_SCALER * xs[np.argmin(diff ** 2)][4]
goal_tau = tau
motor.goal_position = goal_position
motor.goal_tau = goal_tau
self.control.controlMIT(motor, 0, 0, 0, 0, goal_tau)
sleep(0.00003)
def move_towards_sync(self, goal_positions, kps, kds):
for motor, goal_position, kp, kd in zip(self.motors, goal_positions, kps, kds):
delta = goal_position - motor.getPosition()
v = motor.getVelocity()
tau = kp * delta - kd * v
motor.goal_position = goal_position
motor.goal_tau = tau
self.control.controlMIT(motor, 0, 0, 0, 0, tau)
# sleep(0.00003)
def set_goal_torque_sync(self, goal_taus):
for motor, goal_tau in zip(self.motors, goal_taus):
motor.goal_position = 0
motor.goal_tau = goal_tau
self.control.controlMIT(motor, 0, 0, 0, 0, motor.goal_tau)
sleep(0.00003)
def move_torque_sync(self, taus):
for motor,tau in zip(self.motors, taus):
motor.goal_position = 0
motor.goal_tau = tau
self.control.controlMIT(motor, 0, 0, 0, 0, motor.goal_tau)
sleep(0.00003)
def keep_torque_sync(self):
for motor in self.motors:
self.control.controlMIT(motor, 0, 0, 0, 0, motor.goal_tau)
sleep(0.00003)
async def set_goal_positions(self, goal_positions, kps):
for motor, goal_position, kp in zip(self.motors, goal_positions, kps):
motor.goal_position = goal_position
motor.goal_tau = 0
self.control.controlMIT(motor, kp, 1.2, goal_position, 0, 0)
await asyncio.sleep(0.00003)
def set_goal_positions_sync(self, goal_positions, kps, kds):
for motor, goal_position, kp, kd in zip(self.motors, goal_positions, kps, kds):
motor.goal_position = goal_position
motor.goal_tau = 0
self.control.controlMIT(motor, kp, kd, goal_position, 0, 0)
sleep(0.00003)
def set_goal_posvel(self, goal_positions):
for motor, goal_position in zip(self.motors, goal_positions):
motor.goal_position = goal_position
motor.goal_tau = 0
self.control.control_pos_force(motor, goal_position, 1, 1)
def controlMIT(self, motor, kp, kd, q, dq, tau):
self.control.controlMIT(self.motors[motor], kp, kd, q, dq, tau)
- Crear el archivo damiao_test.py
Copia el siguiente código a damiao_test.py
damiao_motor.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import time
import math
import numpy as np
from damiao_motor import Motor, MotorControl, DM_Motor_Type, Control_Type
# Configuration parameters
NUM_MOTORS = 1 # Number of motors to control
CAN_INTERFACE = "can0" # CAN interface name
CAN_BITRATE = 1000000 # CAN bus baud rate
MOTOR_TYPE = DM_Motor_Type.DM4310 # Motor model
# Sine wave parameters
FREQUENCY = 0.1 # Frequency (Hz)
AMPLITUDE = 6 # Amplitude (rad)
DURATION = 60.0 # Operation duration (s)
def main():
# Create motor controller object
control = MotorControl(CAN_INTERFACE, bitrate=CAN_BITRATE)
# Create and add motors
motors = []
for i in range(NUM_MOTORS):
motor = Motor(MOTOR_TYPE, i + 1, i + 0X10) # CAN IDs start from 1
control.addMotor(motor)
motors.append(motor)
control.enable(motor)
print(f"Motor {i + 1} enabled")
try:
start_time = time.time()
while time.time() - start_time < DURATION:
current_time = time.time() - start_time
# Calculate sine wave position
position = AMPLITUDE * math.sin(2 * math.pi * FREQUENCY * current_time)
# Control all motors
for motor in motors:
control.controlMIT(
motor,
kp=10.0, # Position gain
kd=1.0, # Velocity gain
q=position, # Target position
dq=0.0, # Target velocity
tau=0.0 # Feedforward torque
)
# Control frequency
time.sleep(0.001) # 1kHz control frequency
except KeyboardInterrupt:
print("\nProgram interrupted by user")
finally:
# Disable all motors
for motor in motors:
control.disable(motor)
print(f"Motor {motor.SlaveID} disabled")
if __name__ == "__main__":
main()
- Ejecutar damiao_test.py
python damiao_test.py
El motor se iluminará en verde y rotará a una velocidad sinusoidal.
Soporte Técnico y Discusión del Producto
¡Gracias por elegir nuestros productos! Estamos aquí para brindarte diferentes tipos de soporte para asegurar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para satisfacer diferentes preferencias y necesidades.