DM_Gripper – Guía de Ensamblaje de Código Abierto
El DM_Gripper es una pinza robótica impresa en 3D de código abierto diseñada alrededor del motor DM-4310-2EC. Su diseño modular enfatiza la facilidad de ensamblaje y desensamblaje, permitiendo tanto a aficionados como a desarrolladores de robótica crear prototipos rápidamente, personalizar y escalar sus proyectos.
Totalmente compatible con actuadores DAMIAO, el DM_Gripper también proporciona flexibilidad para la integración con otras marcas de actuadores. Su único sistema de garras intercambiables permite a los usuarios intercambiar rápidamente garras de diferentes formas, soportando diversas tareas robóticas y casos de uso.
Todas las partes de la pinza son completamente imprimibles en 3D con requisitos mínimos de soporte, haciéndola accesible para makers, investigadores e ingenieros por igual.
Esta wiki incluye:
- Descripción general del diseño del mecanismo
- Lista completa de materiales (BOM)
- Guía de impresión 3D y configuración
- Instrucciones de ensamblaje paso a paso
- Demo y casos de uso prácticos
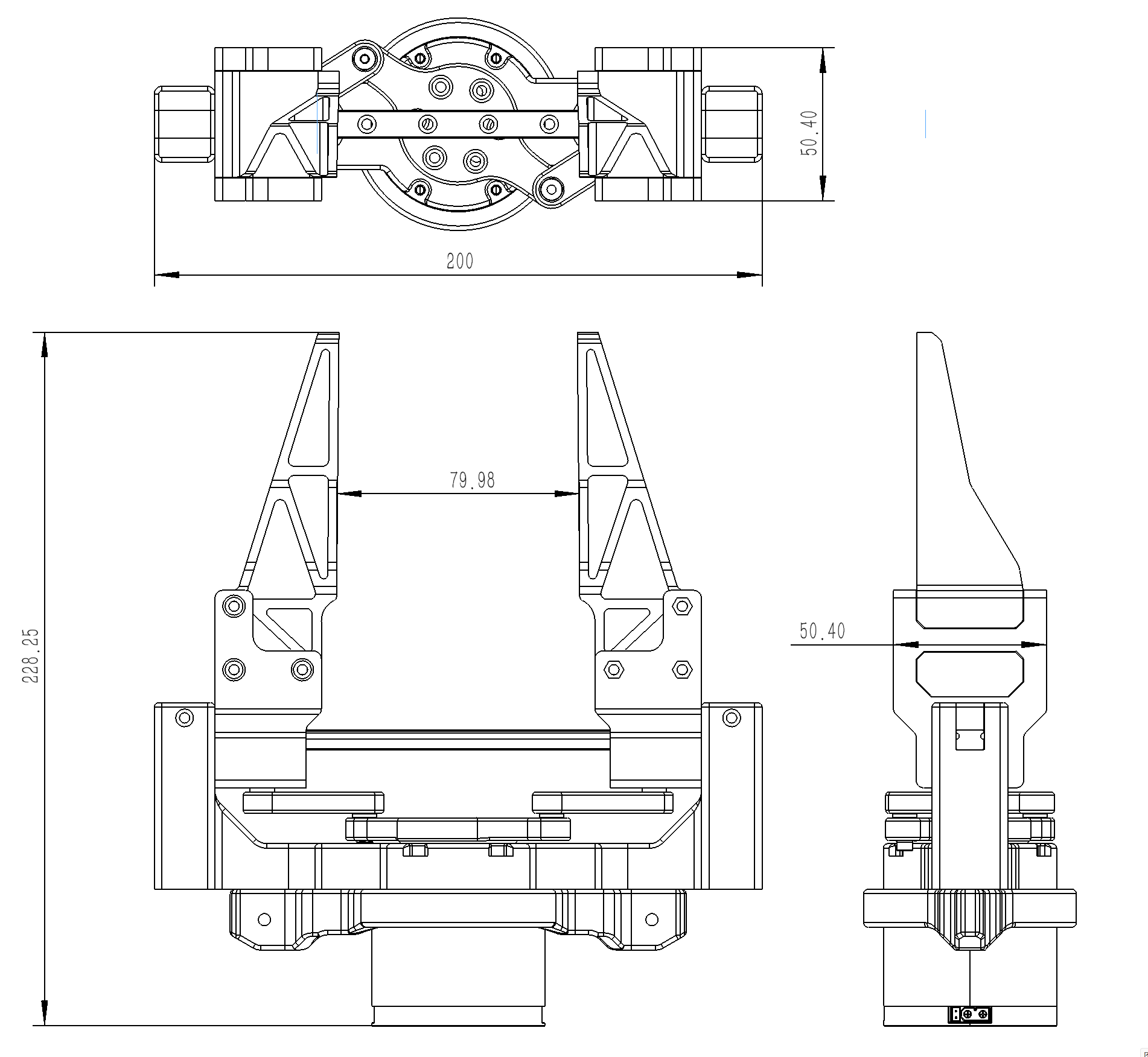
Dimensiones/Rango de Operación
Las dimensiones y el rango de operación se muestran a continuación en milímetros, con altura variable dependiendo de las garras utilizadas.
Mecanismos de Accionamiento
Esta pinza presenta un mecanismo clásico de Doble Manivela y Deslizador, traduciendo el movimiento rotacional a movimiento axial.
- Demostración de Manivela y Deslizador:

- Demostración de Simulación de Movimiento
BOM
🔩 Sujetadores
| Nombre | Cantidad |
|---|---|
| Tornillo de Cabeza Redonda Phillips PM3×8 | 8 |
| Tornillo de Cabeza Hexagonal M3×20 | 4 |
| Tornillo de Cabeza Hexagonal M3×25 | 6 |
| Tornillo de Cabeza Hexagonal M3×50 | 8 |
| Tornillo de Cabeza Hexagonal M3×16 | 12 |
| Tuerca Hexagonal Autoblocante de Nylon 304 M3 (Espesor-3.9mm × Ancho-5.5mm) | 18 |
| Arandela de Resorte – M3 | 4 |
| Arandela Plana – M3×7mm (DE) × 0.5mm (Espesor) | 8 |
⚙️ Rodamiento
| Nombre | Cantidad |
|---|---|
| Rodamiento de Empuje Miniatura F3-8M (DI-3mm × DE-8mm × Espesor-3.5mm) | 4 |
🛠️ Movimiento Lineal
| Nombre | Cantidad |
|---|---|
| Riel Lineal de Acero Inoxidable MGN9, 200 mm | 1 |
| Carro de Riel Lineal MGN9C (Estándar) | 2 |
🔌 Actuador
| Nombre | Cantidad |
|---|---|
| Motor DM4310-2EC | 1 |
🧩 Imprimibles Personalizados
| Nombre | Cantidad |
|---|---|
| Partes Impresas en 3D | 1 conjunto |
Guía de Ensamblaje
Guía de Impresión 3D
-
Si tienes material de soporte dedicado o PETG+PLA en tu AMS y quieres el mejor acabado superficial en las caras soportadas, por favor consulta Esta Wiki.
Nota: tu trabajo de impresión puede tomar más tiempo. -
Si solo tienes un filamento para imprimir, asegúrate de imprimir con las orientaciones correctas y decide si necesitas los siguientes pasos (Activa AVANZADO en Bambu Studio).
avisoNo cambies la distancia Top Z si estás usando PETG o ABS. Manténlas como predeterminadas. Solo cambia esto si usas PLA.
-
Paso 1: Diseño de impresión con soportes mínimos requeridos

-
Paso 2: Las configuraciones Scarf proporcionan un mejor acabado superficial como se marca en los Rectángulos Verdes.

-
Paso 3: Mis Configuraciones de Impresión: altura de capa 0.2mm, densidad de relleno 25%, Estilo – Panal 3D.




-
Guía de Ensamblaje Paso a Paso
- Paso 1: Fijar los Soportes de Garra a los deslizadores MGN9C con ocho tornillos de cabeza de hongo M3×8
- Paso 2: Apilar los rodamientos, rotores y enlaces (estilo "hamburguesa")
- Paso 3: Colocar ocho arandelas M7 arriba y abajo de las ranuras
- Paso 4: Colocar cuatro tuercas arriba y abajo de las arandelas
- Paso 5: Atornillar cuatro pares de tornillos M3×20 y arandelas de resorte a las tuercas (usar alicates si es necesario)
- Paso 6: Colocar la Base y el Actuador en posición; los patrones en la placa del rotor y el actuador deben alinearse
- Paso 7: Atornillar seis tornillos M3×16 para asegurar la placa del rotor al actuador
- Paso 8: Empujar la base de la garra al rango máximo para los siguientes pasos
- Paso 9: Adjuntar el soporte de leva a la parte inferior
- Paso 10: Fijar el soporte de leva con cuatro pares de tornillos M3×25 y tuercas
- Paso 11: Fijar la base con seis tornillos M3×16 (Sacar el riel para esta etapa y deslizarlo de vuelta después)
- Paso 12: Usar dos pares de tornillos M3×50 y tuercas para bloquear el riel en la base
- Paso 13: Deslizar el prensador de riel y asegurar con dos pares de tornillos M3×25 y tuercas
- Paso 14: Colocar las garras en los soportes de garra, y asegurarlas con seis pares de tornillos M3×50 y tuercas
Demos y Archivos CAD
- Sigue la Wiki de Actuadores Damiao para configurar todo si no lo has hecho aún.
- Sigue el Demo del Controlador de Torque (muchas gracias a tianrking) para hacer que la pinza se mueva con una GUI genial.

- Los recursos CAD: archivos STEP editables y STLs están disponibles aquí.