Extendiendo MCP con Grove
Descripción general
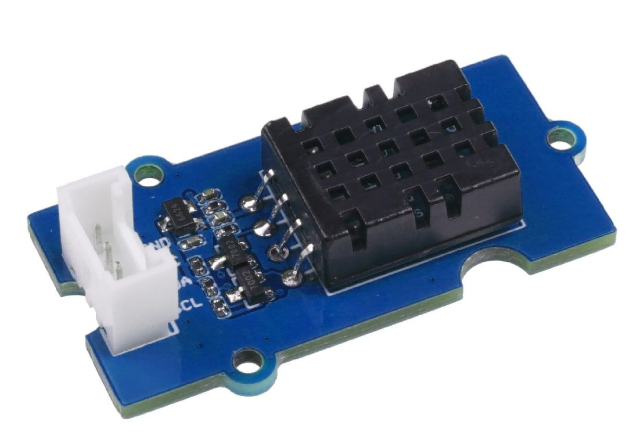
Este documento describe cómo usar el sensor de temperatura y humedad DHT20 a través de la interfaz Grove en la placa de desarrollo SenseCAP Watcher basada en ESP32-S3.
Preparación del hardware
| SenseCAP Watcher para XiaoZhi | Grove - Sensor de temperatura y humedad V2.0 (DHT20) |
|---|---|
 |  |
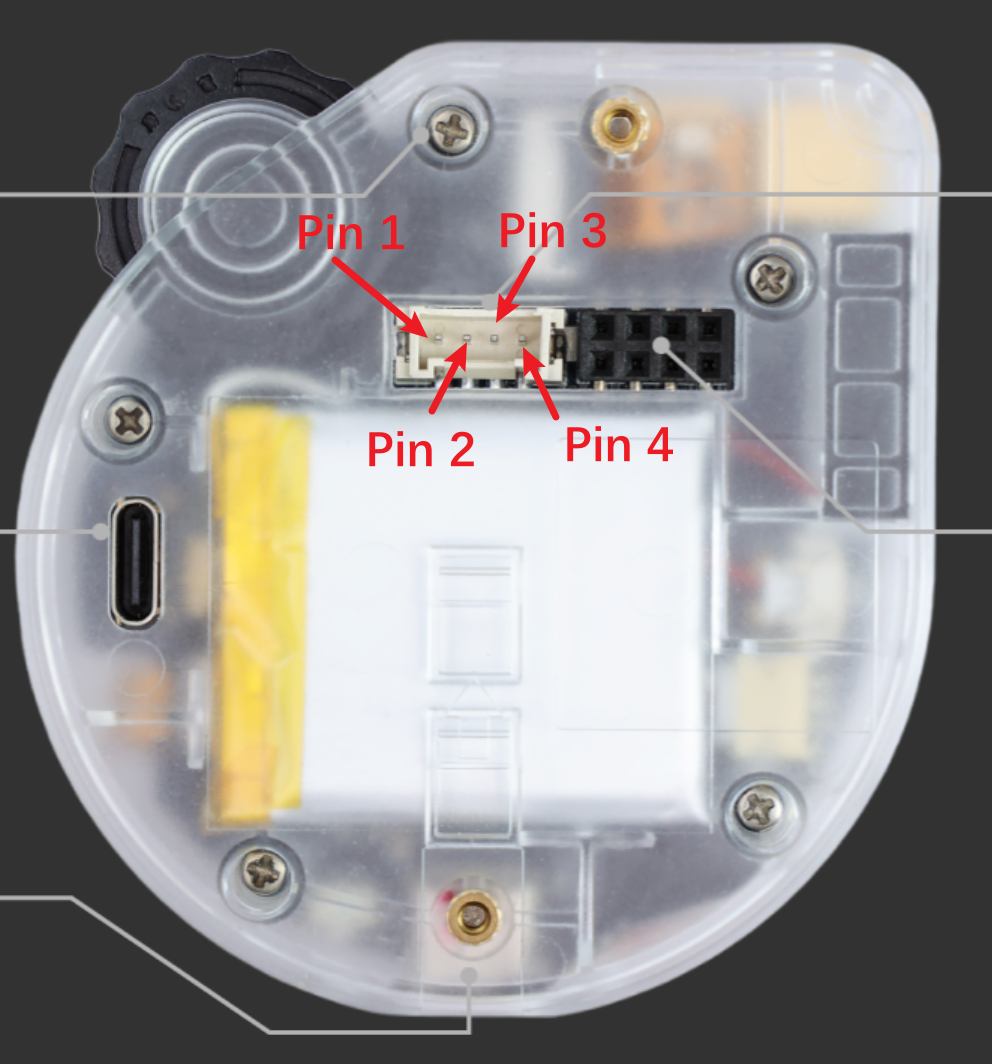
Definición de la interfaz Grove (J5)
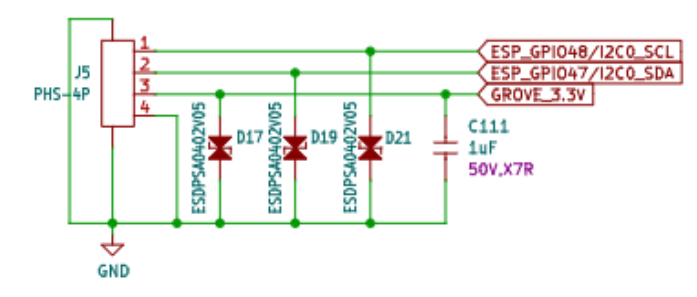
Según el esquema de hardware, la interfaz Grove utiliza los siguientes pines:
| Pin Grove | función | Conexión ESP32-S3 |
|---|---|---|
| Pin 1 | SCL | GPIO48 (I2C0_SCL) |
| Pin 2 | SDA | GPIO47 (I2C0_SDA) |
| Pin 3 | VCC | GROVE_3.3V (Alimentación 3.3V) |
| Pin 4 | GND | GND |
Sensor DHT20
- Dirección I2C: 0x38 (Fija, no se puede cambiar)
- Voltaje de alimentación: 2.0V - 5.5V (usar 3.3V)
- Protocolo de comunicación: I2C (hasta 400kHz)
- Rango de medición:
- Temperatura: -40°C a +80°C (Precisión: ±0.5°C)
- Humedad: 0% a 100% RH (Precisión: ±3% RH)
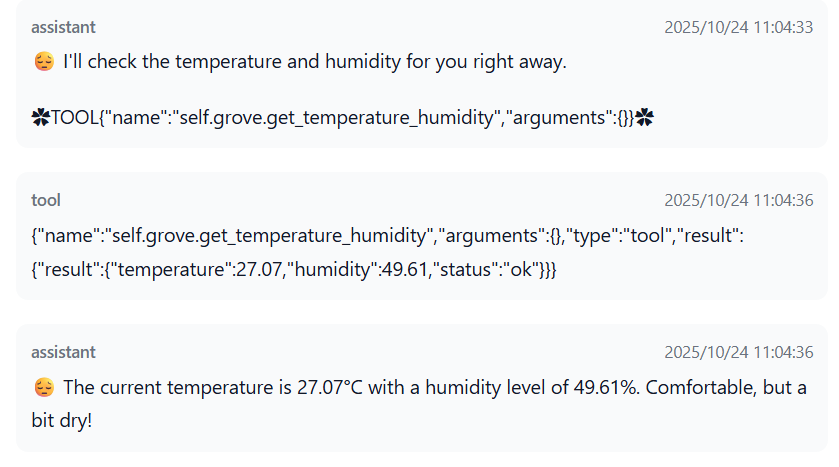
Resultado de ejecución
Estructura de archivos
Código original:
Archivos nuevos:
-
Debes colocar los dos archivos anteriores en la siguiente ubicación:
- ubicación del archivo
main/boards/sensecap-watcher/
├── dht20.h # DHT20 driver header
└── dht20.cc # DHT20 driver implementation
- ubicación del archivo
Archivos modificados
-
Consulta Funcionalidad principal (Interfaz de herramienta MCP interna) para la parte del código modificado.
-
Debes reemplazar el archivo anterior en la siguiente ubicación:
- ubicación del archivo
main/boards/sensecap-watcher/
└── sensecap_watcher.cc # Integrates DHT20 sensor and MCP tool
- ubicación del archivo
El código de ejemplo anterior es solo para referencia. Debes modificarlo según tu modelo de sensor específico, entorno de desarrollo y versión de firmware para asegurar una integración adecuada y una compilación exitosa.
- Los sensores Grove I2C se pueden conectar directamente al bus I2C.
- Los sensores no I2C se pueden conectar a través de pines GPIO disponibles, permitiendo una integración flexible de varios tipos de sensores.
Funcionalidad principal (Sensor DHT20)
1. Inicialización del sensor
El controlador DHT20 implementa el proceso completo de inicialización:
- Paso 1. Reiniciar sensor: Enviar comando de reinicio 0xBA
- Paso 2. Configuración del sistema: Escribir [0x08, 0x00] al registro 0xE1
- Paso 3. Verificación de calibración: Verificar el bit[3] del registro de estado para asegurar que el sensor esté calibrado
- Paso 4. Mecanismo de reintento: Reintentar hasta 5 veces si falla la calibración
esp_err_t ret = dht20_sensor_->Initialize();
if (ret == ESP_OK) {
ESP_LOGI(TAG, "DHT20 initialized successfully");
}
2. Lectura de temperatura y humedad
Proceso de lectura:
- Paso 1. Activar medición: enviar comando [0xAC, 0x33, 0x00]
- Paso 2. Esperar medición: retraso de 80ms
- Paso 3. Leer 8 bytes: [estado, humedad Alta, Media, Baja | temperatura Alta, Media, Baja, CRC]
- Paso 4. Análisis de datos:
- Humedad = (valor crudo de 20 bits) × 100 / 2^20
- Temperatura = (valor crudo de 20 bits) × 200 / 2^20 - 50
float temperature, humidity;
esp_err_t ret = dht20_sensor_->ReadTempAndHumidity(temperature, humidity);
if (ret == ESP_OK) {
printf("Temperature: %.2f°C, Humidity: %.2f%%\n", temperature, humidity);
}
3. Protocolo de comunicación I2C
| Función | Comando/Registro | Datos |
|---|---|---|
| Reiniciar sensor | 0xBA | - |
| Registro de configuración | 0xE1 | [0x08, 0x00] |
| Activar medición | - | [0xAC, 0x33, 0x00] |
| Leer estado | - | 1 byte |
| Leer datos | - | 7 bytes |
4. Definición del byte de estado
| Bit | Función | Valor |
|---|---|---|
| bit[7] | Estado de medición | 1=Midiendo, 0=Inactivo |
| bit[6:4] | Reservado | - |
| bit[3] | Estado de calibración | 1=Calibrado, 0=No calibrado |
| bit[2:0] | Reservado | - |
5. Algoritmo de análisis de datos
// Humidity data (20 bits)
uint32_t humidity_raw = (data[1] << 12) | (data[2] << 4) | (data[3] >> 4);
float humidity = humidity_raw * 100.0f / 1048576.0f;
// Temperature data (20 bits)
uint32_t temperature_raw = ((data[3] & 0x0F) << 16) | (data[4] << 8) | data[5];
float temperature = temperature_raw * 200.0f / 1048576.0f - 50.0f;
Funcionalidad principal (Interfaz de herramienta MCP interna)
1. Descripción de la función
- Nombre de la herramienta:
self.grove.get_temperature_humidity - Aplicación de la herramienta: Leer la temperatura y humedad actuales del sensor DHT20 conectado a Grove
2. Ejemplo de llamada
La IA puede llamarla de la siguiente manera:
result = call_tool("self.grove.get_temperature_humidity", {})
3. Formato de retorno
-
Éxito:
{
"temperature": 25.32,
"humidity": 65.47,
"status": "ok"
} -
Fallo:
{
"error": "DHT20 sensor not initialized"
}o
{
"error": "Failed to read DHT20: ESP_ERR_TIMEOUT"
}
4. Parte del código modificado y explicación
Inclusión de archivos de encabezado agregados
-
Agrega las siguientes declaraciones de inclusión al principio de
sensecap_watcher.cc:#include "dht20.h"
#include "mcp_server.h" -
Propósito
-
dht20.h — Introduce las APIs del controlador para el sensor DHT20, habilitando la lectura de temperatura y humedad.
-
mcp_server.h — Proporciona APIs relacionadas con el servidor MCP interno, permitiendo la comunicación y registro de herramientas MCP.
-
Variable miembro agregada
-
Agrega la siguiente variable miembro en la clase
SensecapWatcher:DHT20* dht20_sensor_ = nullptr; -
Propósito
dht20_sensor_— Un puntero al objeto del sensor DHT20 conectado a través de la interfaz Grove.
Se utiliza para inicializar, almacenar y acceder al sensor de temperatura y humedad durante todo el ciclo de vida de la instanciaSensecapWatcher.- Se asigna en
InitializeDHT20()y es utilizado por las herramientas MCP para leer datos del sensor. - Se inicializa a
nullptrpara indicar que el sensor aún no ha sido configurado, con verificaciones de nulo realizadas antes de la lectura.
Inicialización DHT20 y herramienta MCP agregadas
-
Agrega la siguiente función miembro en la clase
SensecapWatcher:void InitializeDHT20() {
ESP_LOGI(TAG, "Initialize DHT20 sensor on Grove port");
// Create DHT20 sensor instance
dht20_sensor_ = new DHT20(i2c_bus_);
// Initialize and calibrate the sensor
esp_err_t ret = dht20_sensor_->Initialize();
if (ret != ESP_OK) {
ESP_LOGE(TAG, "DHT20 initialization failed: %s", esp_err_to_name(ret));
delete dht20_sensor_;
dht20_sensor_ = nullptr;
return;
}
ESP_LOGI(TAG, "DHT20 sensor initialized successfully");
// Register MCP tool for reading temperature and humidity
auto& mcp_server = McpServer::GetInstance();
mcp_server.AddTool("self.grove.get_temperature_humidity",
"Read temperature and humidity from the Grove-connected DHT20 sensor.\n"
"Return format: {\"temperature\": value(°C), \"humidity\": value(%), \"status\": \"ok\"}\n"
"If reading fails, returns an error message.",
PropertyList(),
[this](const PropertyList&) -> ReturnValue {
if (!dht20_sensor_) {
return "{\"error\": \"DHT20 sensor not initialized\"}";
}
float temperature = 0.0f;
float humidity = 0.0f;
esp_err_t ret = dht20_sensor_->ReadTempAndHumidity(temperature, humidity);
if (ret != ESP_OK) {
std::string error_msg = "{\"error\": \"Failed to read DHT20: ";
error_msg += esp_err_to_name(ret);
error_msg += "\"}";
return error_msg;
}
// Format response as JSON
char buffer[128];
snprintf(buffer, sizeof(buffer),
"{\"temperature\": %.2f, \"humidity\": %.2f, \"status\": \"ok\"}",
temperature, humidity);
return std::string(buffer);
});
ESP_LOGI(TAG, "DHT20 MCP tool registered: self.grove.get_temperature_humidity");
} -
Agregar llamada de inicialización DHT20 en el constructor
SensecapWatcher() {
...
InitializeCamera();
InitializeDHT20(); // Initialize Grove DHT20 sensor
} -
Propósito
InitializeDHT20()— Inicializa el sensor DHT20 en la interfaz Grove y registra una herramienta MCP para permitir el acceso interno a los datos de temperatura y humedad.- La función crea la instancia
DHT20, la calibra y verifica errores de inicialización. - Si la inicialización es exitosa, registra la herramienta MCP
self.grove.get_temperature_humiditypara leer datos del sensor vía JSON. - Se llama en el constructor de
SensecapWatcherpara asegurar que el sensor esté listo cuando la placa se inicie:
Solución de problemas
Problemas comunes
- Fallo en la inicialización del sensor
- Posibles causas:
- Interfaz Grove no alimentada correctamente
- Problemas de conexión I2C
- Sensor no conectado o dañado
- Solución
uint32_t grove_power = esp_io_expander_get_level(io_exp_handle, BSP_PWR_GROVE);
ESP_LOGI(TAG, "Grove power status: %d", grove_power);
- Tiempo de espera de lectura agotado
- Posibles causas:
- Sensor ocupado
- Conflicto en el bus I2C
- Solución
- Asegurar intervalo ≥1s entre lecturas
- Verificar otros dispositivos en I2C
- Datos inválidos
- Posibles causas:
- Sensor no calibrado
- Verificación CRC falló (no implementada en la versión actual)
- Solución:
- Re-inicializar sensor
- Considerar implementar verificación CRC (data[6])
Referencias
Mantenimiento
el código reside en main/boards/sensecap-watcher/, no afecta otras placas.