Ajustar GR00T N1.5 para el Brazo LeRobot SO-101 e Implementar en Jetson AGX Thor
Introducción
Este wiki explica cómo ajustar NVIDIA Isaac GR00T N1.5 para el brazo LeRobot SO-101 e implementarlo en NVIDIA Jetson Thor. Cubre:
- Preparación de hardware para LeRobot SO-101 y Jetson AGX Thor
- Configuración del entorno de software para GR00T N1.5 en Jetson Thor
- Uso de la plataforma de entrenamiento LeRobot: recolección de datos, formateo de conjuntos de datos y ajuste fino para el brazo SO-101
- Flujos de trabajo de ejemplo para implementar la política GR00T N1.5 entrenada (LeRobot + SO-101) en Jetson Thor
- Consejos de solución de problemas y errores comunes

Se proporcionan instrucciones detalladas paso a paso y documentación de referencia para ayudarte a ir desde la configuración inicial hasta la implementación completa.
Comenzando con el Kit de Desarrollo NVIDIA Jetson Thor
Descripción General de Jetson Thor
El Kit de Desarrollo NVIDIA® Jetson AGX Thor™ es una potencia para IA física y robótica humanoide. Está construido alrededor de la GPU NVIDIA Blackwell e incluye 128 GB de memoria de alta velocidad, entregando hasta 2,070 FP4 TFLOPS de cómputo de IA mientras opera dentro de un rango de potencia de 40-130 W (uso común hasta 130 W).
Puedes obtener el Kit de Desarrollo Jetson AGX Thor de Seeed Studio aquí: Seeed – Kit de Desarrollo NVIDIA Jetson AGX Thor™

Los elementos de hardware incluidos en la caja son una unidad Thor y un adaptador de corriente:
Flashear la Imagen del Sistema Thor
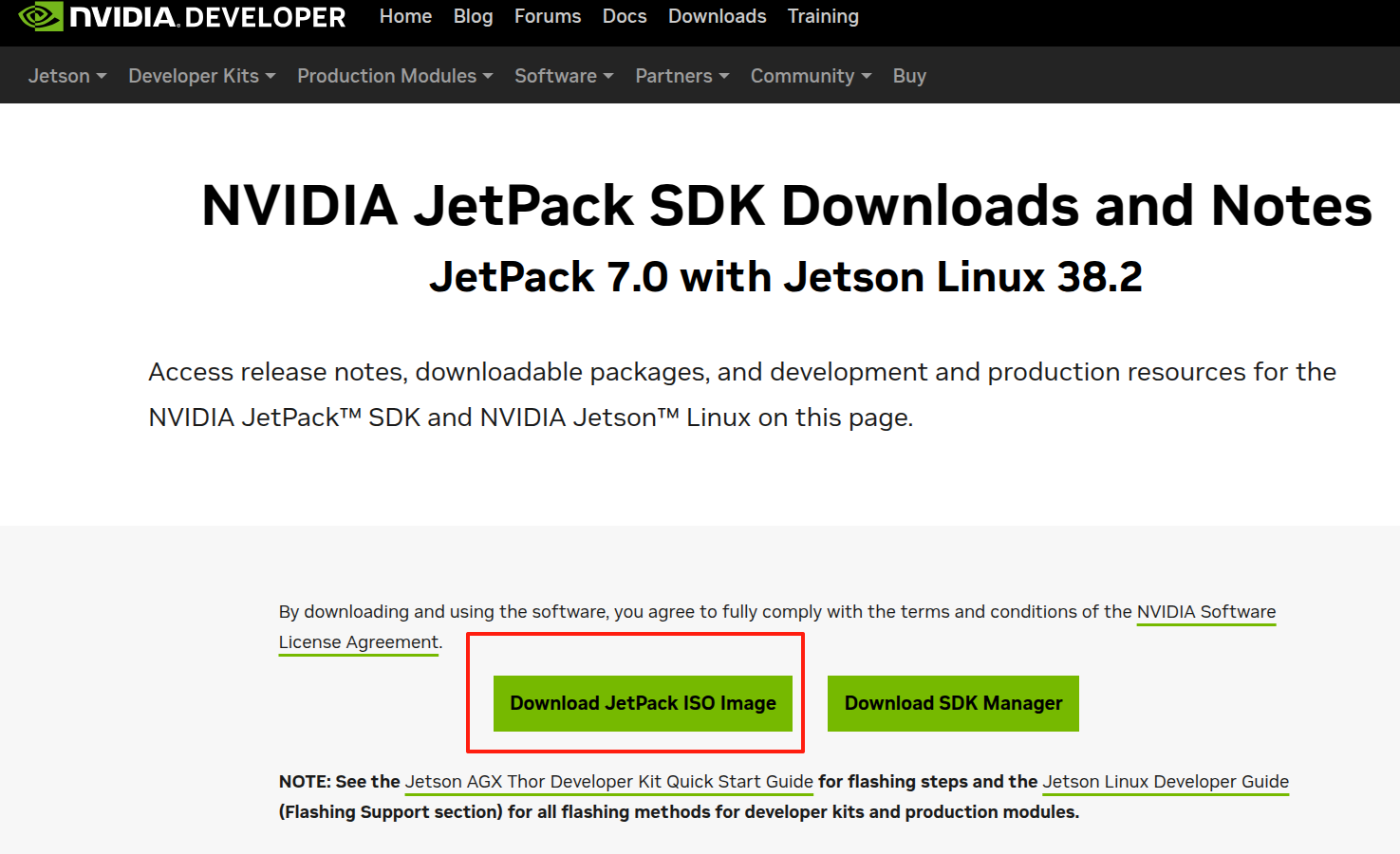
A partir del 10 de septiembre de 2025, la última versión disponible de imagen del sistema para Thor es 38.2. Si necesitas volver a flashear el sistema para Thor, por favor sigue las instrucciones en esta sección. Elementos Requeridos para el Flasheo:
- Un dispositivo host con más de 25 GB de espacio disponible en disco (compatible con Ubuntu o Windows OS)
- Una unidad USB con capacidad de al menos 16 GB
- Un monitor y cable de pantalla DP/HDMI
- Un entorno de suministro de energía capaz de entregar más de 240 W
- Un teclado con interfaz USB
Primero, descarga la imagen del sistema en formato ISO para Thor desde el sitio web oficial de NVIDIA. Haz clic aquí para visitar la página de descarga:
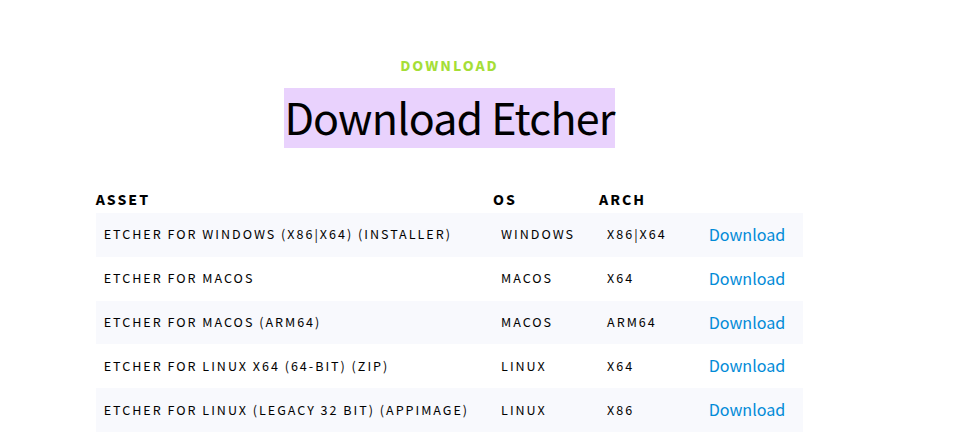
Instala Balena Etcher en la máquina host. Para descargar el instalador, haz clic aquí y selecciona la versión apropiada basada en tu sistema operativo host:
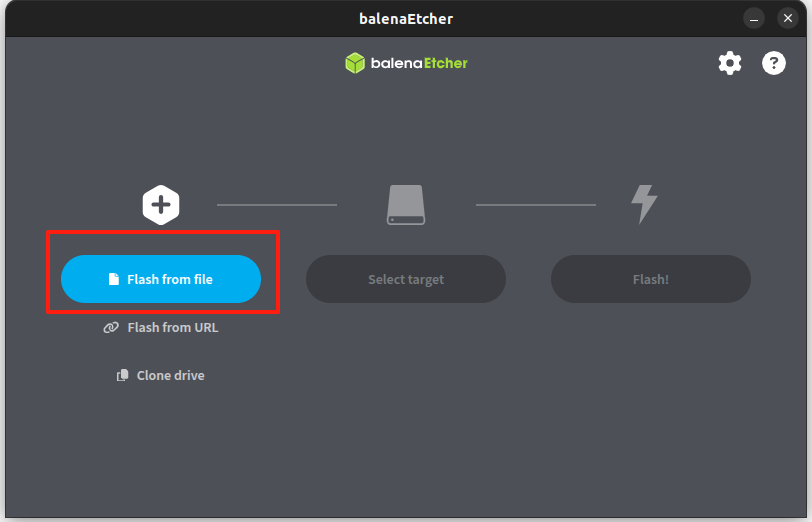
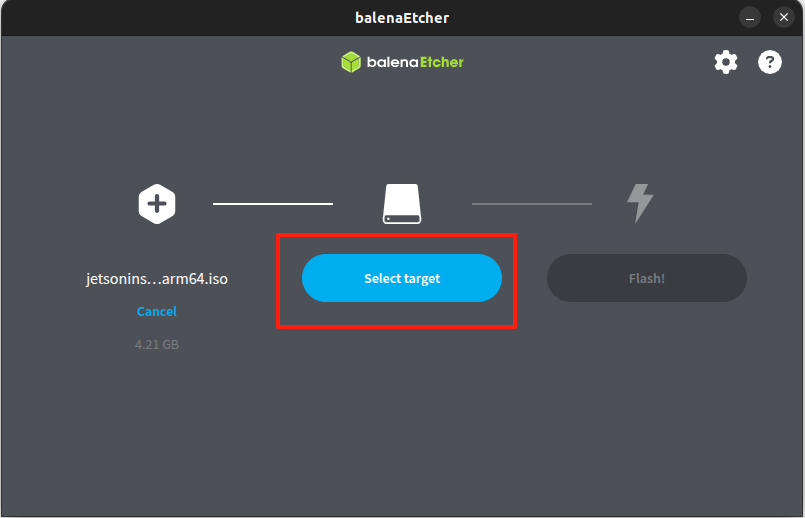
Después de descargar el archivo de imagen ISO e instalar exitosamente Balena Etcher, inserta la unidad USB en la máquina host. Luego, ejecuta Balena Etcher para crear una unidad USB de arranque para flashear Thor:
Este proceso formateará la unidad USB. Por favor asegúrate de hacer una copia de seguridad de cualquier dato importante de antemano.
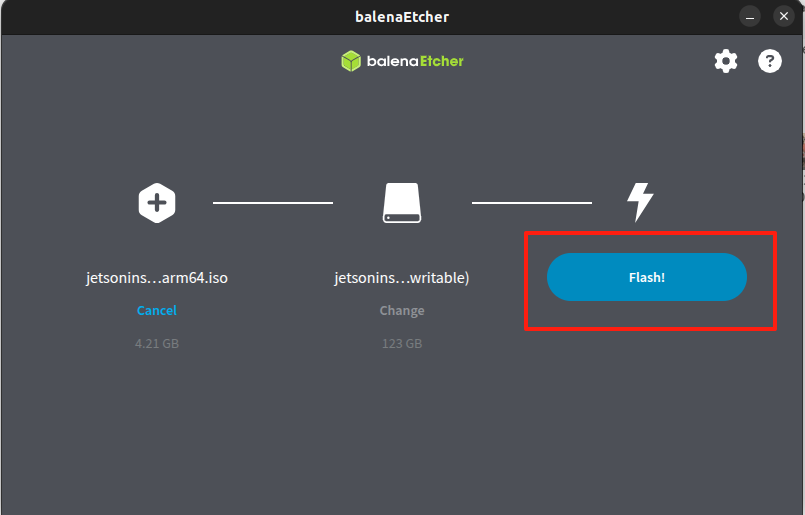
Selecciona el archivo de imagen ISO descargado desde tu almacenamiento local, luego elige el dispositivo objetivo—es decir, tu unidad USB.
¡Asegúrate de verificar cuidadosamente el nombre del dispositivo objetivo y el directorio de montaje! Haz clic en Flash! y espera a que el proceso se complete. Una vez terminado, la unidad USB para flashear el sistema en Thor está lista:
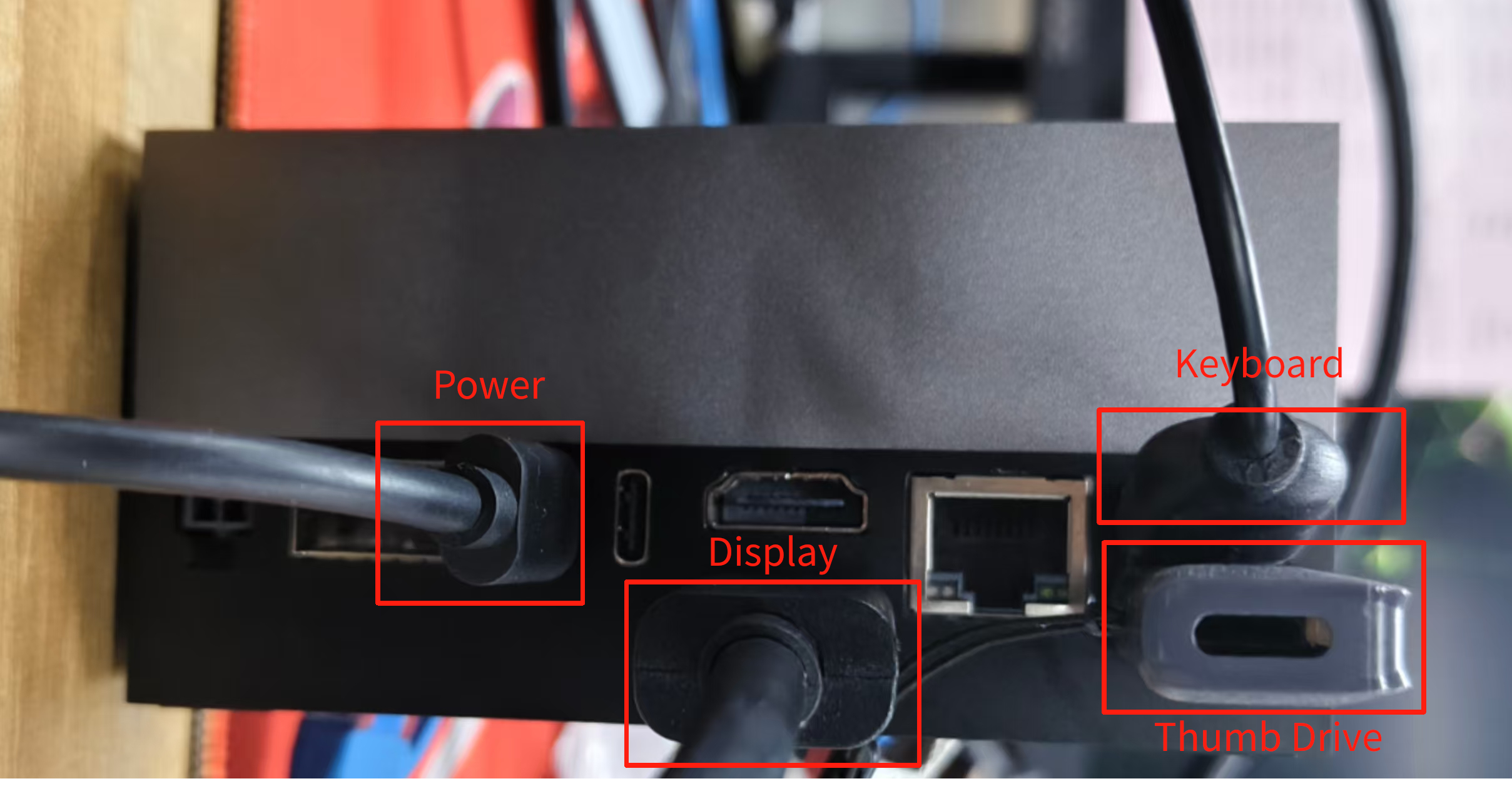
A continuación, inserta la unidad USB preparada, teclado, cable de pantalla (DP/HDMI) y fuente de alimentación (Type-C) en la placa Thor para comenzar el proceso de flasheo.
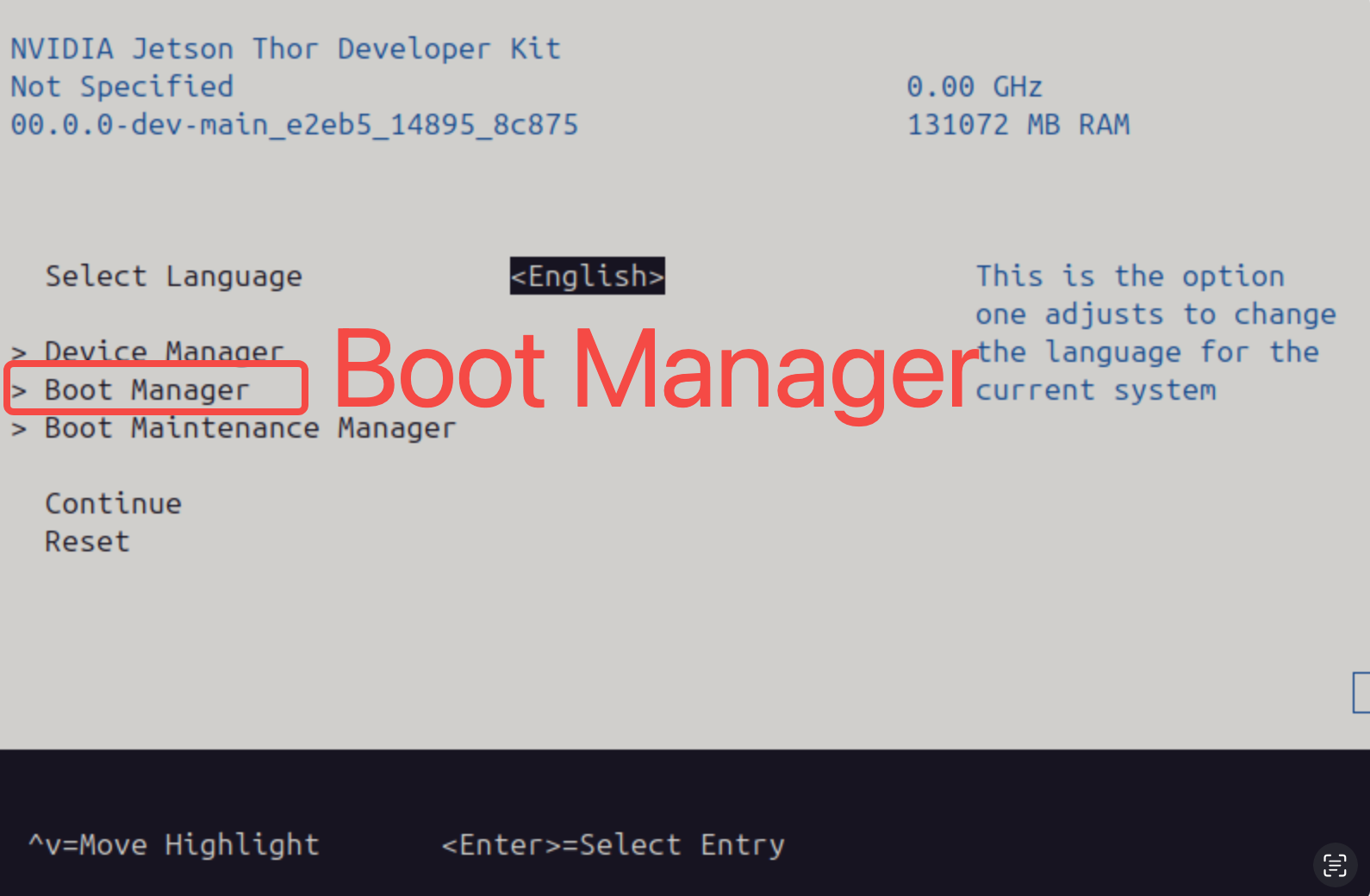
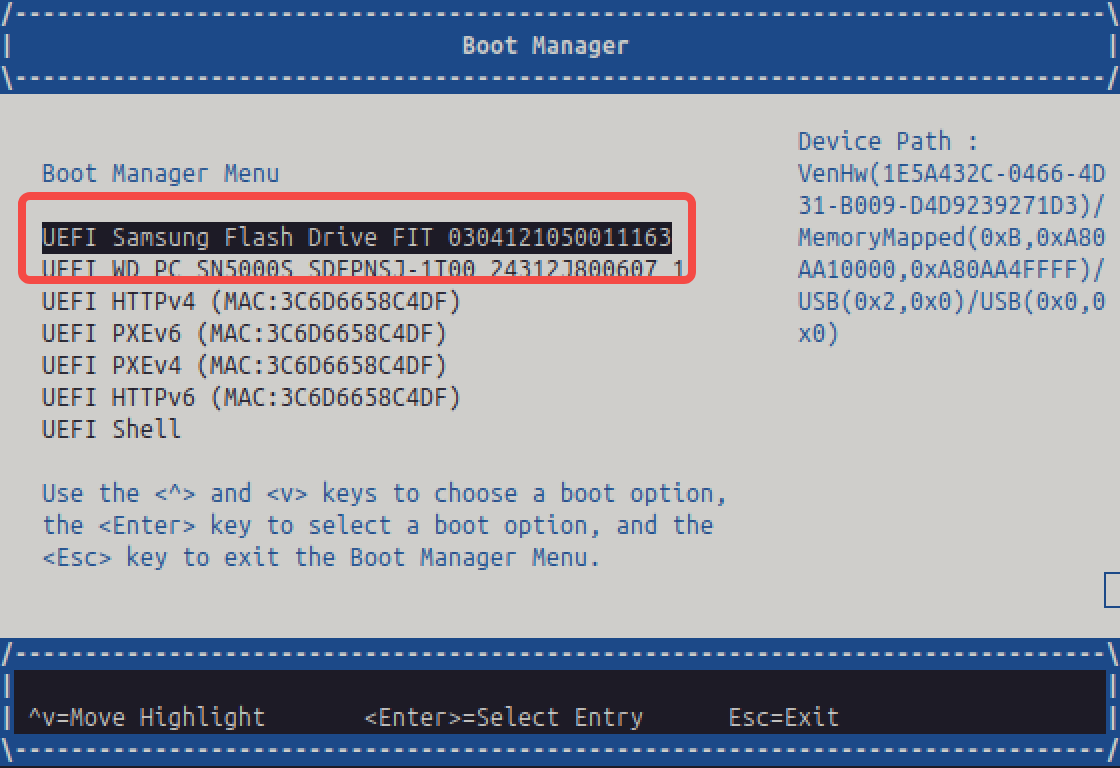
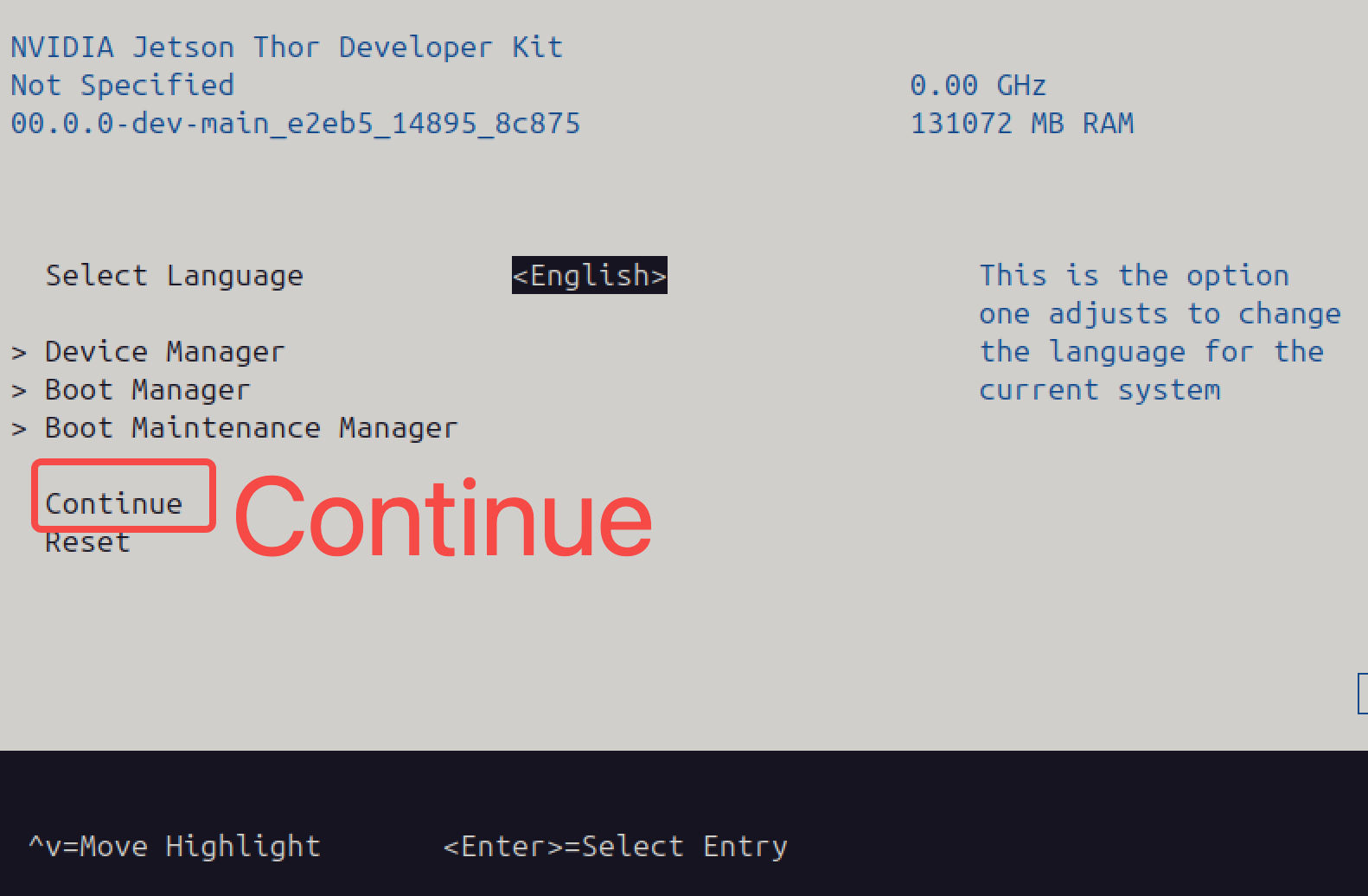
Enciende el Thor y entra a la interfaz de arranque. Selecciona Boot Manager, luego elige la unidad USB que fue insertada en Thor (basado en el nombre de tu unidad USB). Presiona Esc para regresar al menú anterior, y selecciona Continue:
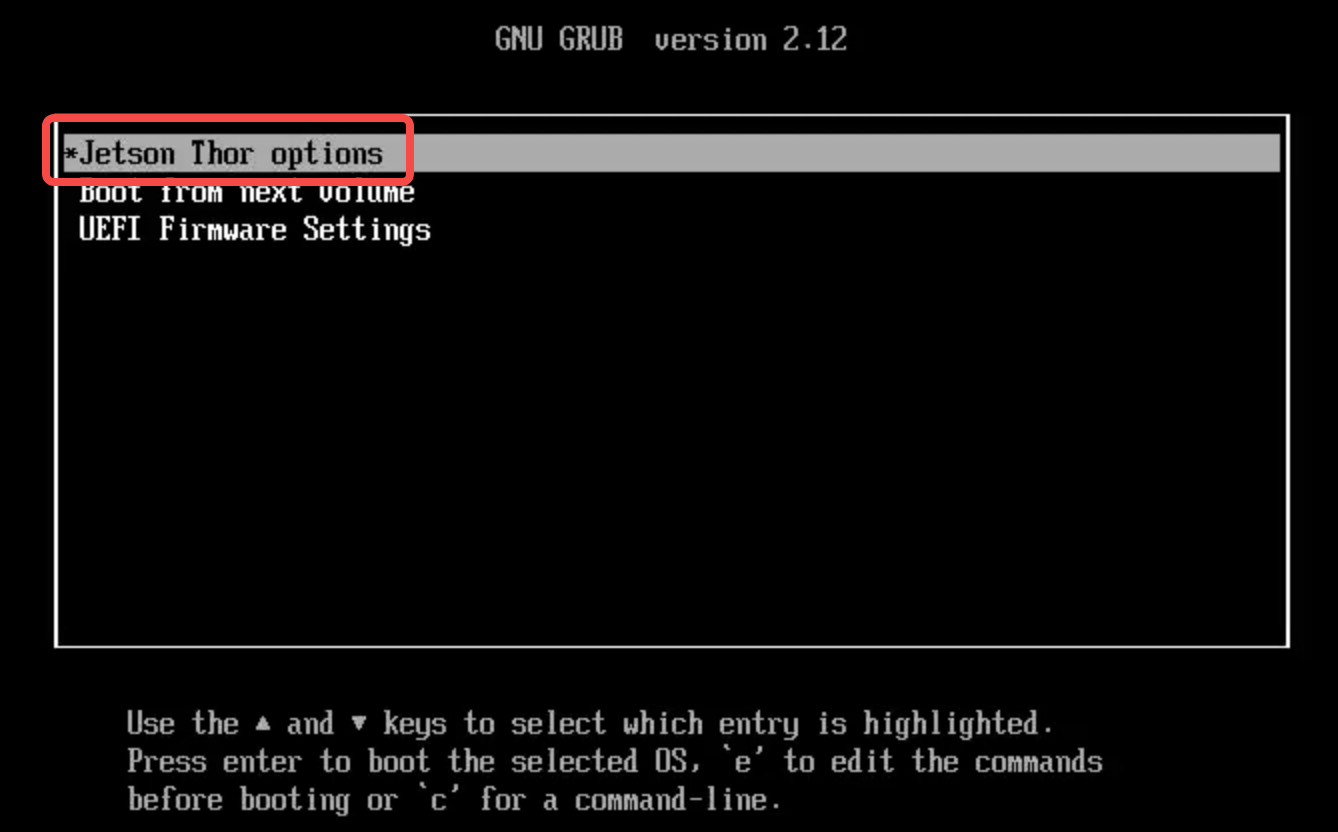
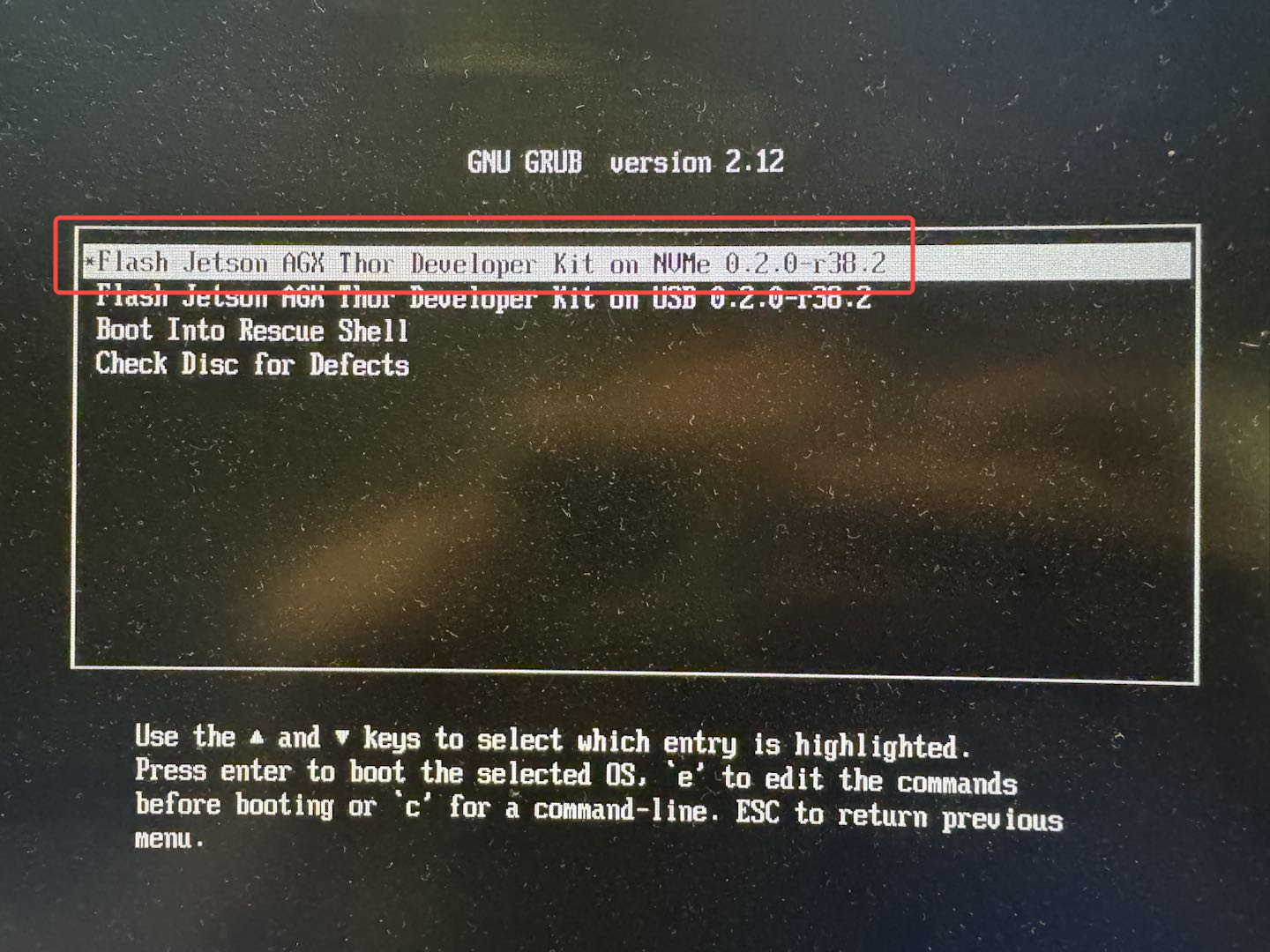
Después de una breve pantalla negra, aparecerá la siguiente interfaz. Selecciona Jetson Thor options y presiona Enter. Luego, elige la opción
Flash Jetson AGX Thor Developer Kit on NVMe 0.2.0-r38.2 para flashear la imagen del sistema en la unidad de estado sólido NVMe de Thor:
Se mostrará una gran cantidad de información de registro en la pantalla. Espera aproximadamente 15 minutos. Una vez que esta etapa esté completa, el dispositivo se reiniciará automáticamente y procederá a la siguiente interfaz. Espera hasta que la barra de Update Progress alcance el 100%, lo que indica que el proceso de flasheo se ha completado exitosamente:
Después del flasheo, puedes proceder con la configuración inicial del sistema:
Esta imagen del sistema no incluye CUDA, TensorRT u otros componentes SDK de JetPack.
Configuración Básica del Entorno de Desarrollo en Thor
Esta sección proporciona ejemplos de cómo instalar dependencias de software comúnmente utilizadas en Thor para propósitos de desarrollo. Estas dependencias tienen como objetivo facilitar el desarrollo posterior.
Ten en cuenta que las dependencias listadas son solo para referencia—por favor instala paquetes adicionales según los requisitos de sus proyectos individuales.
Instalación de Dependencias de Desarrollo Esenciales
Instalación del SDK JetPack
Abre la terminal y ejecuta el siguiente comando. Después de una breve espera, CUDA, TensorRT y otros componentes SDK serán instalados:
sudo apt update
sudo apt install nvidia-jetpack
Instalación del Navegador
Firefox ha sido probado y verificado para ejecutarse de manera estable en Ubuntu 24.04:
sudo apt update
sudo apt install firefox
Instalación de Jtop
Para instalar jtop, consulta las siguientes instrucciones.
sudo apt update
sudo apt install python3
sudo apt install python3-pip
sudo pip3 install -U pip
sudo pip3 install jetson-stats
Instalación de Miniconda
Miniconda se utiliza para aislar entornos de desarrollo. Para instalar miniconda, consulta las siguientes instrucciones:
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
chmod +x Miniconda3-latest-Linux-aarch64.sh
./Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc
conda --version
Instalación de la Versión GPU de PyTorch
Compilar la versión GPU de PyTorch desde el código fuente en Thor puede resultar en problemas de compatibilidad. Por conveniencia, proporcionamos un archivo .whl precompilado para ayudar a los desarrolladores a configurar rápidamente un entorno de desarrollo habilitado para PyTorch en Thor.
Aquí se proporciona un archivo wheel precompilado para instalar PyTorch 2.9 en Thor. Este archivo fue compilado en un entorno Python 3.10 + CUDA 13.
haz clic en Python 3.10 + CUDA 13 pytorch2.9 para descargar el archivo .whl.
haz clic en Python 3.10 + CUDA 13 torchvision0.24 para descargar el archivo .whl.
haz clic en Python 3.10 + CUDA 13 torchvision0.23 para descargar el archivo .whl.
Otros archivos .whl de dependencias precompiladas Python 3.12 + CUDA 13 para thor se pueden encontrar en:
https://pypi.jetson-ai-lab.io/sbsa/cu130.
Si el archivo wheel esperado no está disponible, el desarrollador necesitará construir las dependencias requeridas por sí mismo para completar la configuración del entorno de desarrollo.
Instalación de Dependencias Adicionales
Este documento proporciona una imagen Docker de referencia para ayudar a los desarrolladores a adaptarse rápidamente al entorno de desarrollo Jetson AGX Thor. Esta imagen es solo para referencia, y los desarrolladores son libres de elegir si usarla basándose en sus necesidades específicas.
Dado que el tamaño de la imagen excede los 40 GB, descargarla desde el servidor es relativamente lento.
Esta imagen Docker puede ejecutar de manera estable la inferencia GR00T N1.5. La salida del comando pip list en la imagen es la siguiente:
pip.list
Package Version Location Installer Editable project location
------------------------- ----------------- ---------------- -------------------------------------- -------------------------
absl-py 2.3.1 /opt/venv/lib/python3.12/site-packages pip
accelerate 1.2.1 /opt/venv/lib/python3.12/site-packages pip
aiohappyeyeballs 2.6.1 /opt/venv/lib/python3.12/site-packages pip
aiohttp 3.12.15 /opt/venv/lib/python3.12/site-packages pip
aiosignal 1.4.0 /opt/venv/lib/python3.12/site-packages pip
albucore 0.0.17 /opt/venv/lib/python3.12/site-packages pip
albumentations 1.4.18 /opt/venv/lib/python3.12/site-packages pip
annotated-types 0.7.0 /opt/venv/lib/python3.12/site-packages pip
antlr4-python3-runtime 4.9.3 /opt/venv/lib/python3.12/site-packages pip
anyio 4.10.0 /opt/venv/lib/python3.12/site-packages pip
argon2-cffi 25.1.0 /opt/venv/lib/python3.12/site-packages pip
argon2-cffi-bindings 25.1.0 /opt/venv/lib/python3.12/site-packages pip
arrow 1.3.0 /opt/venv/lib/python3.12/site-packages pip
asttokens 3.0.0 /opt/venv/lib/python3.12/site-packages pip
astunparse 1.6.3 /opt/venv/lib/python3.12/site-packages pip
async-lru 2.0.5 /opt/venv/lib/python3.12/site-packages pip
attrs 23.2.0 /usr/lib/python3/dist-packages debian
av 12.3.0 /opt/venv/lib/python3.12/site-packages pip
babel 2.17.0 /opt/venv/lib/python3.12/site-packages pip
beautifulsoup4 4.13.5 /opt/venv/lib/python3.12/site-packages pip
bleach 6.2.0 /opt/venv/lib/python3.12/site-packages pip
blessings 1.7 /opt/venv/lib/python3.12/site-packages pip
blinker 1.9.0 /opt/venv/lib/python3.12/site-packages pip
certifi 2025.8.3 /opt/venv/lib/python3.12/site-packages pip
cffi 2.0.0 /opt/venv/lib/python3.12/site-packages pip
charset-normalizer 3.4.3 /opt/venv/lib/python3.12/site-packages pip
click 8.2.1 /opt/venv/lib/python3.12/site-packages pip
cloudpickle 3.1.1 /opt/venv/lib/python3.12/site-packages pip
cmake 3.31.6 /opt/venv/lib/python3.12/site-packages pip
comm 0.2.3 /opt/venv/lib/python3.12/site-packages pip
contourpy 1.3.3 /opt/venv/lib/python3.12/site-packages pip
cramjam 2.11.0 /opt/venv/lib/python3.12/site-packages pip
cryptography 41.0.7 /usr/lib/python3/dist-packages debian
cuda-bindings 13.0.0 /opt/venv/lib/python3.12/site-packages pip
cuda-core 0.3.2 /opt/venv/lib/python3.12/site-packages pip
cuda-pathfinder 1.2.2 /opt/venv/lib/python3.12/site-packages pip
cycler 0.12.1 /opt/venv/lib/python3.12/site-packages pip
Cython 3.1.3 /opt/venv/lib/python3.12/site-packages pip
datasets 4.0.0 /opt/venv/lib/python3.12/site-packages pip
dbus-python 1.3.2 /usr/lib/python3/dist-packages
debugpy 1.8.16 /opt/venv/lib/python3.12/site-packages pip
decorator 5.2.1 /opt/venv/lib/python3.12/site-packages pip
decord 0.6.0 /opt/venv/lib/python3.12/site-packages pip
deepdiff 8.6.1 /opt/venv/lib/python3.12/site-packages pip
defusedxml 0.7.1 /opt/venv/lib/python3.12/site-packages pip
devscripts 2.23.7 /usr/lib/python3/dist-packages
diffusers 0.36.0.dev0 /opt/venv/lib/python3.12/site-packages pip
dill 0.3.8 /opt/venv/lib/python3.12/site-packages pip
distro 1.9.0 /usr/lib/python3/dist-packages debian
dm-tree 0.1.8 /opt/venv/lib/python3.12/site-packages pip
docker-pycreds 0.4.0 /opt/venv/lib/python3.12/site-packages pip
docstring_parser 0.17.0 /opt/venv/lib/python3.12/site-packages pip
docutils 0.22 /opt/venv/lib/python3.12/site-packages pip
draccus 0.11.5 /opt/venv/lib/python3.12/site-packages pip
einops 0.8.1 /opt/venv/lib/python3.12/site-packages pip
eval_type_backport 0.2.2 /opt/venv/lib/python3.12/site-packages pip
evdev 1.9.2 /opt/venv/lib/python3.12/site-packages pip
executing 2.2.1 /opt/venv/lib/python3.12/site-packages pip
Farama-Notifications 0.0.4 /opt/venv/lib/python3.12/site-packages pip
fastjsonschema 2.21.2 /opt/venv/lib/python3.12/site-packages pip
fastparquet 2024.11.0 /opt/venv/lib/python3.12/site-packages pip
feetech-servo-sdk 1.0.0 /opt/venv/lib/python3.12/site-packages pip
filelock 3.19.1 /opt/venv/lib/python3.12/site-packages pip
flash_attn 2.8.4 /opt/venv/lib/python3.12/site-packages pip
Flask 3.1.2 /opt/venv/lib/python3.12/site-packages pip
flatbuffers 25.2.10 /opt/venv/lib/python3.12/site-packages pip
fonttools 4.59.2 /opt/venv/lib/python3.12/site-packages pip
fqdn 1.5.1 /opt/venv/lib/python3.12/site-packages pip
frozenlist 1.7.0 /opt/venv/lib/python3.12/site-packages pip
fsspec 2025.3.0 /opt/venv/lib/python3.12/site-packages pip
gast 0.6.0 /opt/venv/lib/python3.12/site-packages pip
gitdb 4.0.12 /opt/venv/lib/python3.12/site-packages pip
GitPython 3.1.45 /opt/venv/lib/python3.12/site-packages pip
google-pasta 0.2.0 /opt/venv/lib/python3.12/site-packages pip
grpcio 1.74.0 /opt/venv/lib/python3.12/site-packages pip
gymnasium 1.0.0 /opt/venv/lib/python3.12/site-packages pip
h11 0.16.0 /opt/venv/lib/python3.12/site-packages pip
h5py 3.12.1 /opt/venv/lib/python3.12/site-packages pip
hf-xet 1.1.9 /opt/venv/lib/python3.12/site-packages pip
httpcore 1.0.9 /opt/venv/lib/python3.12/site-packages pip
httplib2 0.20.4 /usr/lib/python3/dist-packages
httpx 0.28.1 /opt/venv/lib/python3.12/site-packages pip
huggingface-hub 0.34.4 /opt/venv/lib/python3.12/site-packages pip
hydra-core 1.3.2 /opt/venv/lib/python3.12/site-packages pip
id 1.5.0 /opt/venv/lib/python3.12/site-packages pip
idna 3.10 /opt/venv/lib/python3.12/site-packages pip
imageio 2.34.2 /opt/venv/lib/python3.12/site-packages pip
importlib_metadata 8.7.0 /opt/venv/lib/python3.12/site-packages pip
iniconfig 2.1.0 /opt/venv/lib/python3.12/site-packages pip
inquirerpy 0.3.4 /opt/venv/lib/python3.12/site-packages pip
iopath 0.1.9 /opt/venv/lib/python3.12/site-packages pip
ipykernel 6.30.1 /opt/venv/lib/python3.12/site-packages pip
ipython 9.5.0 /opt/venv/lib/python3.12/site-packages pip
ipython_pygments_lexers 1.1.1 /opt/venv/lib/python3.12/site-packages pip
ipywidgets 8.1.7 /opt/venv/lib/python3.12/site-packages pip
isoduration 20.11.0 /opt/venv/lib/python3.12/site-packages pip
itsdangerous 2.2.0 /opt/venv/lib/python3.12/site-packages pip
jaraco.classes 3.4.0 /opt/venv/lib/python3.12/site-packages pip
jaraco.context 6.0.1 /opt/venv/lib/python3.12/site-packages pip
jaraco.functools 4.3.0 /opt/venv/lib/python3.12/site-packages pip
jedi 0.19.2 /opt/venv/lib/python3.12/site-packages pip
jeepney 0.9.0 /opt/venv/lib/python3.12/site-packages pip
Jinja2 3.1.6 /opt/venv/lib/python3.12/site-packages pip
json5 0.12.1 /opt/venv/lib/python3.12/site-packages pip
jsonlines 4.0.0 /opt/venv/lib/python3.12/site-packages pip
jsonpointer 3.0.0 /opt/venv/lib/python3.12/site-packages pip
jsonschema 4.25.1 /opt/venv/lib/python3.12/site-packages pip
jsonschema-specifications 2025.9.1 /opt/venv/lib/python3.12/site-packages pip
jupyter 1.1.1 /opt/venv/lib/python3.12/site-packages pip
jupyter_client 8.6.3 /opt/venv/lib/python3.12/site-packages pip
jupyter-console 6.6.3 /opt/venv/lib/python3.12/site-packages pip
jupyter_core 5.8.1 /opt/venv/lib/python3.12/site-packages pip
jupyter-events 0.12.0 /opt/venv/lib/python3.12/site-packages pip
jupyter-lsp 2.3.0 /opt/venv/lib/python3.12/site-packages pip
jupyter_server 2.17.0 /opt/venv/lib/python3.12/site-packages pip
jupyter_server_terminals 0.5.3 /opt/venv/lib/python3.12/site-packages pip
jupyterlab 4.4.7 /opt/venv/lib/python3.12/site-packages pip
jupyterlab_myst 2.4.2 /opt/venv/lib/python3.12/site-packages pip
jupyterlab_pygments 0.3.0 /opt/venv/lib/python3.12/site-packages pip
jupyterlab_server 2.27.3 /opt/venv/lib/python3.12/site-packages pip
jupyterlab_widgets 3.0.15 /opt/venv/lib/python3.12/site-packages pip
keras 3.11.3 /opt/venv/lib/python3.12/site-packages pip
keyring 25.6.0 /opt/venv/lib/python3.12/site-packages pip
kiwisolver 1.4.9 /opt/venv/lib/python3.12/site-packages pip
kornia 0.7.4 /opt/venv/lib/python3.12/site-packages pip
kornia_rs 0.1.9 /opt/venv/lib/python3.12/site-packages pip
lark 1.2.2 /opt/venv/lib/python3.12/site-packages pip
launchpadlib 1.11.0 /usr/lib/python3/dist-packages
lazr.restfulclient 0.14.6 /usr/lib/python3/dist-packages
lazr.uri 1.0.6 /usr/lib/python3/dist-packages
lazy_loader 0.4 /opt/venv/lib/python3.12/site-packages pip
lerobot 0.3.4 /opt/lerobot /opt/venv/lib/python3.12/site-packages pip
libclang 18.1.1 /opt/venv/lib/python3.12/site-packages pip
llvmlite 0.44.0 /opt/venv/lib/python3.12/site-packages pip
lockfile 0.12.2 /opt/venv/lib/python3.12/site-packages pip
Mako 1.3.10 /opt/venv/lib/python3.12/site-packages pip
Markdown 3.9 /opt/venv/lib/python3.12/site-packages pip
markdown-it-py 4.0.0 /opt/venv/lib/python3.12/site-packages pip
MarkupSafe 3.0.2 /opt/venv/lib/python3.12/site-packages pip
matplotlib 3.10.0 /opt/venv/lib/python3.12/site-packages pip
matplotlib-inline 0.1.7 /opt/venv/lib/python3.12/site-packages pip
mdurl 0.1.2 /opt/venv/lib/python3.12/site-packages pip
mergedeep 1.3.4 /opt/venv/lib/python3.12/site-packages pip
mistune 3.1.4 /opt/venv/lib/python3.12/site-packages pip
ml_dtypes 0.5.3 /opt/venv/lib/python3.12/site-packages pip
more-itertools 10.8.0 /opt/venv/lib/python3.12/site-packages pip
mpmath 1.3.0 /opt/venv/lib/python3.12/site-packages pip
msgpack 1.1.1 /opt/venv/lib/python3.12/site-packages pip
multidict 6.6.4 /opt/venv/lib/python3.12/site-packages pip
multiprocess 0.70.16 /opt/venv/lib/python3.12/site-packages pip
mypy_extensions 1.1.0 /opt/venv/lib/python3.12/site-packages pip
namex 0.1.0 /opt/venv/lib/python3.12/site-packages pip
nbclient 0.10.2 /opt/venv/lib/python3.12/site-packages pip
nbconvert 7.16.6 /opt/venv/lib/python3.12/site-packages pip
nbformat 5.10.4 /opt/venv/lib/python3.12/site-packages pip
nest-asyncio 1.6.0 /opt/venv/lib/python3.12/site-packages pip
networkx 3.5 /opt/venv/lib/python3.12/site-packages pip
nh3 0.3.0 /opt/venv/lib/python3.12/site-packages pip
ninja 1.13.0 /opt/venv/lib/python3.12/site-packages pip
notebook 7.4.5 /opt/venv/lib/python3.12/site-packages pip
notebook_shim 0.2.4 /opt/venv/lib/python3.12/site-packages pip
numba 0.61.2 /opt/venv/lib/python3.12/site-packages pip
numpy 2.3.3 /opt/venv/lib/python3.12/site-packages pip
numpydantic 1.6.7 /opt/venv/lib/python3.12/site-packages pip
nvtx 0.2.13 /opt/venv/lib/python3.12/site-packages pip
oauthlib 3.2.2 /usr/lib/python3/dist-packages
omegaconf 2.3.0 /opt/venv/lib/python3.12/site-packages pip
onnx 1.17.0 /opt/venv/lib/python3.12/site-packages pip
opencv-contrib-python 4.13.0 /opt/venv/lib/python3.12/site-packages pip
opencv-python 4.11.0.86 /opt/venv/lib/python3.12/site-packages pip
opencv-python-headless 4.11.0.86 /opt/venv/lib/python3.12/site-packages pip
opt_einsum 3.4.0 /opt/venv/lib/python3.12/site-packages pip
optimum 1.27.0 /opt/venv/lib/python3.12/site-packages pip
optree 0.17.0 /opt/venv/lib/python3.12/site-packages pip
orderly-set 5.5.0 /opt/venv/lib/python3.12/site-packages pip
packaging 25.0 /opt/venv/lib/python3.12/site-packages pip
pandas 2.2.3 /opt/venv/lib/python3.12/site-packages pip
pandocfilters 1.5.1 /opt/venv/lib/python3.12/site-packages pip
parso 0.8.5 /opt/venv/lib/python3.12/site-packages pip
peft 0.17.0 /opt/venv/lib/python3.12/site-packages pip
pettingzoo 1.25.0 /opt/venv/lib/python3.12/site-packages pip
pexpect 4.9.0 /opt/venv/lib/python3.12/site-packages pip
pfzy 0.3.4 /opt/venv/lib/python3.12/site-packages pip
pid 3.0.4 /opt/venv/lib/python3.12/site-packages pip
pillow 11.3.0 /opt/venv/lib/python3.12/site-packages pip
pip 25.2 /opt/venv/lib/python3.12/site-packages pip
pkginfo 1.12.1.2 /opt/venv/lib/python3.12/site-packages pip
platformdirs 4.4.0 /opt/venv/lib/python3.12/site-packages pip
pluggy 1.6.0 /opt/venv/lib/python3.12/site-packages pip
portalocker 3.2.0 /opt/venv/lib/python3.12/site-packages pip
prometheus_client 0.22.1 /opt/venv/lib/python3.12/site-packages pip
prompt_toolkit 3.0.52 /opt/venv/lib/python3.12/site-packages pip
propcache 0.3.2 /opt/venv/lib/python3.12/site-packages pip
protobuf 6.32.0 /opt/venv/lib/python3.12/site-packages pip
psutil 7.0.0 /opt/venv/lib/python3.12/site-packages pip
ptyprocess 0.7.0 /opt/venv/lib/python3.12/site-packages pip
pure_eval 0.2.3 /opt/venv/lib/python3.12/site-packages pip
pyarrow 21.0.0 /opt/venv/lib/python3.12/site-packages pip
pycparser 2.23 /opt/venv/lib/python3.12/site-packages pip
pycuda 2025.1.1 /opt/venv/lib/python3.12/site-packages pip
pydantic 2.10.6 /opt/venv/lib/python3.12/site-packages pip
pydantic_core 2.27.2 /opt/venv/lib/python3.12/site-packages pip
Pygments 2.19.2 /opt/venv/lib/python3.12/site-packages pip
PyGObject 3.48.2 /usr/lib/python3/dist-packages
PyJWT 2.7.0 /usr/lib/python3/dist-packages debian
pynput 1.8.1 /opt/venv/lib/python3.12/site-packages pip
pyparsing 3.1.1 /usr/lib/python3/dist-packages debian
pyrsistent 0.20.0 /usr/lib/python3/dist-packages
pyserial 3.5 /opt/venv/lib/python3.12/site-packages pip
pytest 8.4.2 /opt/venv/lib/python3.12/site-packages pip
python-apt 2.7.7+ubuntu5 /usr/lib/python3/dist-packages
python-daemon 3.1.2 /opt/venv/lib/python3.12/site-packages pip
python-dateutil 2.9.0.post0 /opt/venv/lib/python3.12/site-packages pip
python-json-logger 3.3.0 /opt/venv/lib/python3.12/site-packages pip
python-xlib 0.33 /opt/venv/lib/python3.12/site-packages pip
pytools 2025.2.4 /opt/venv/lib/python3.12/site-packages pip
pytorch3d 0.7.8 /opt/venv/lib/python3.12/site-packages pip
pytz 2025.2 /opt/venv/lib/python3.12/site-packages pip
PyYAML 6.0.2 /opt/venv/lib/python3.12/site-packages pip
pyyaml-include 1.4.1 /opt/venv/lib/python3.12/site-packages pip
pyzmq 27.1.0 /opt/venv/lib/python3.12/site-packages pip
ray 2.40.0 /opt/venv/lib/python3.12/site-packages pip
readme_renderer 44.0 /opt/venv/lib/python3.12/site-packages pip
referencing 0.36.2 /opt/venv/lib/python3.12/site-packages pip
regex 2025.9.1 /opt/venv/lib/python3.12/site-packages pip
requests 2.32.3 /opt/venv/lib/python3.12/site-packages pip
requests-toolbelt 1.0.0 /opt/venv/lib/python3.12/site-packages pip
rerun-sdk 0.24.1 /opt/venv/lib/python3.12/site-packages pip
rfc3339-validator 0.1.4 /opt/venv/lib/python3.12/site-packages pip
rfc3986 2.0.0 /opt/venv/lib/python3.12/site-packages pip
rfc3986-validator 0.1.1 /opt/venv/lib/python3.12/site-packages pip
rfc3987-syntax 1.1.0 /opt/venv/lib/python3.12/site-packages pip
rich 14.1.0 /opt/venv/lib/python3.12/site-packages pip
rpds-py 0.27.1 /opt/venv/lib/python3.12/site-packages pip
safetensors 0.6.2 /opt/venv/lib/python3.12/site-packages pip
scikit-build 0.18.1 /opt/venv/lib/python3.12/site-packages pip
scikit-image 0.25.2 /opt/venv/lib/python3.12/site-packages pip
scipy 1.16.1 /opt/venv/lib/python3.12/site-packages pip
SecretStorage 3.4.0 /opt/venv/lib/python3.12/site-packages pip
semantic-version 2.10.0 /opt/venv/lib/python3.12/site-packages pip
Send2Trash 1.8.3 /opt/venv/lib/python3.12/site-packages pip
sentencepiece 0.2.1 /opt/venv/lib/python3.12/site-packages pip
sentry-sdk 2.37.1 /opt/venv/lib/python3.12/site-packages pip
service 0.6.0 /opt/venv/lib/python3.12/site-packages pip
setproctitle 1.3.7 /opt/venv/lib/python3.12/site-packages pip
setuptools 80.9.0 /opt/venv/lib/python3.12/site-packages pip
setuptools-rust 1.12.0 /opt/venv/lib/python3.12/site-packages pip
shtab 1.7.2 /opt/venv/lib/python3.12/site-packages pip
siphash24 1.8 /opt/venv/lib/python3.12/site-packages pip
six 1.16.0 /usr/lib/python3/dist-packages
smmap 5.0.2 /opt/venv/lib/python3.12/site-packages pip
sniffio 1.3.1 /opt/venv/lib/python3.12/site-packages pip
soupsieve 2.8 /opt/venv/lib/python3.12/site-packages pip
stack-data 0.6.3 /opt/venv/lib/python3.12/site-packages pip
sympy 1.14.0 /opt/venv/lib/python3.12/site-packages pip
tensorboard 2.20.0 /opt/venv/lib/python3.12/site-packages pip
tensorboard-data-server 0.7.2 /opt/venv/lib/python3.12/site-packages pip
tensorflow 2.20.0 /opt/venv/lib/python3.12/site-packages pip
tensorrt 10.13.2.6 /opt/venv/lib/python3.12/site-packages pip
termcolor 3.1.0 /opt/venv/lib/python3.12/site-packages pip
terminado 0.18.1 /opt/venv/lib/python3.12/site-packages pip
tf_keras 2.20.1 /opt/venv/lib/python3.12/site-packages pip
tianshou 0.5.1 /opt/venv/lib/python3.12/site-packages pip
tifffile 2025.9.9 /opt/venv/lib/python3.12/site-packages pip
timm 1.0.14 /opt/venv/lib/python3.12/site-packages pip
tinycss2 1.4.0 /opt/venv/lib/python3.12/site-packages pip
tokenizers 0.21.4 /opt/venv/lib/python3.12/site-packages pip
toml 0.10.2 /opt/venv/lib/python3.12/site-packages pip
torch 2.9.0 /opt/venv/lib/python3.12/site-packages pip
torchvision 0.24.0 /opt/venv/lib/python3.12/site-packages pip
tornado 6.5.2 /opt/venv/lib/python3.12/site-packages pip
tqdm 4.67.1 /opt/venv/lib/python3.12/site-packages pip
traitlets 5.14.3 /opt/venv/lib/python3.12/site-packages pip
transformers 4.51.3 /opt/venv/lib/python3.12/site-packages pip
triton 3.5.0+gite3b8f77a /opt/venv/lib/python3.12/site-packages pip
twine 6.2.0 /opt/venv/lib/python3.12/site-packages pip
typeguard 4.4.2 /opt/venv/lib/python3.12/site-packages pip
types-python-dateutil 2.9.0.20250822 /opt/venv/lib/python3.12/site-packages pip
typing_extensions 4.12.2 /opt/venv/lib/python3.12/site-packages pip
typing-inspect 0.9.0 /opt/venv/lib/python3.12/site-packages pip
tyro 0.9.17 /opt/venv/lib/python3.12/site-packages pip
tzdata 2025.2 /opt/venv/lib/python3.12/site-packages pip
uri-template 1.3.0 /opt/venv/lib/python3.12/site-packages pip
urllib3 2.5.0 /opt/venv/lib/python3.12/site-packages pip
uv 0.8.16 /opt/venv/lib/python3.12/site-packages pip
wadllib 1.3.6 /usr/lib/python3/dist-packages
wandb 0.18.0 /opt/venv/lib/python3.12/site-packages pip
wcwidth 0.2.13 /opt/venv/lib/python3.12/site-packages pip
webcolors 24.11.1 /opt/venv/lib/python3.12/site-packages pip
webencodings 0.5.1 /opt/venv/lib/python3.12/site-packages pip
websocket-client 1.8.0 /opt/venv/lib/python3.12/site-packages pip
Werkzeug 3.1.3 /opt/venv/lib/python3.12/site-packages pip
wheel 0.45.1 /opt/venv/lib/python3.12/site-packages pip
widgetsnbextension 4.0.14 /opt/venv/lib/python3.12/site-packages pip
wrapt 1.17.3 /opt/venv/lib/python3.12/site-packages pip
xxhash 3.5.0 /opt/venv/lib/python3.12/site-packages pip
yarl 1.20.1 /opt/venv/lib/python3.12/site-packages pip
zipp 3.23.0 /opt/venv/lib/python3.12/site-packages pip
La imagen se puede descargar directamente desde Docker Hub e incluye dependencias comúnmente utilizadas como PyTorch, TensorRT y FlashAttention:
docker pull johnnync/isaac-gr00t:r38.2.arm64-sbsa-cu130-24.04
Esta imagen de Docker no admite la invocación de scripts de LeRobot para la inferencia del modelo ACT. Si necesita ejecutar el conjunto completo de scripts de LeRobot, utilice un entorno fuera de esta imagen.
Para ejecutar Docker en Thor, consulte el siguiente comando. Reemplace your_docker_img:tag con el nombre y etiqueta de su imagen de Docker, o use el ID de la imagen:
sudo docker run --rm -it \
--network=host \
-e NVIDIA_DRIVER_CAPABILITIES=compute,utility,video,graphics \
--runtime nvidia \
--privileged \
-v /tmp/.X11-unix:/tmp/.X11-unix \
-v /etc/X11:/etc/X11 \
--device /dev/nvhost-vic \
-v /dev:/dev \
your_docker_img:tag
Recolección de Datos Usando el SO-ARM
Para un tutorial detallado sobre la recolección de datos, consulte el siguiente enlace:
https://wiki.seeedstudio.com/es/lerobot_so100m_new/#record-the-dataset
Este enlace contiene un tutorial completo para el SO-ARM, que cubre configuración, ensamblaje, calibración, recolección de datos, entrenamiento e inferencia.
La recolección de datos para el brazo robótico lerobot se puede realizar en una PC o directamente en un dispositivo Jetson.
- Método 1: Recopilar datos usando Jetson
- Método 2: Recopilar datos usando una PC Ubuntu
Los procedimientos de recolección de datos son esencialmente los mismos para ambos métodos.
¡Jetson puede no ser capaz de transmitir simultáneamente dos cámaras USB con los mismos requisitos de ancho de banda. Si conecta dos cámaras USB, deben estar conectadas a diferentes chips de hub USB!
Para transmitir dos cámaras USB simultáneamente en Thor, después de conectar una cámara al puerto USB-A, también necesitará usar un hub USB externo conectado a través del puerto USB Type-C. Esto asegura que la segunda cámara USB esté montada en un controlador de hub USB diferente dentro de Thor. Un ejemplo de un hub USB Type-C compatible se muestra a continuación:

El dock USB Type-C debe conectarse a puertos específicos en Thor para asegurar que los periféricos funcionen correctamente, como se muestra a continuación:

Configuración del Entorno Lerobot (opcional)
El proceso de configuración del entorno de desarrollo para Lerobot se puede encontrar en la subsección del siguiente enlace:
https://wiki.seeedstudio.com/es/lerobot_so100m_new/#install-lerobot
Configurar los motores
Los motores en cada articulación del SO-ARM necesitan ser configurados antes del ensamblaje. Los pasos de configuración se pueden encontrar en la subsección del siguiente enlace:
https://wiki.seeedstudio.com/es/lerobot_so100m_new/#configure-the-motors
Ensamblaje
El proceso de instalación de los brazos maestro y seguidor del SO-ARM se puede encontrar en la subsección del siguiente enlace:
https://wiki.seeedstudio.com/es/lerobot_so100m_new/#assembly
Calibración del SO-ARM
Después de que el SO-ARM haya sido completamente ensamblado, se requiere calibración. Consulte la subsección del siguiente enlace para el procedimiento de calibración:
https://wiki.seeedstudio.com/es/lerobot_so100m_new/#calibrate
Al calibrar los brazos robóticos, por favor NO conecte ninguna cámara USB, ya que esto puede causar conflictos de puertos o asignaciones incorrectas de puertos.
Después de ejecutar el script de calibración, mueva manualmente cada articulación del brazo robótico para asegurar que alcance su rango completo de movimiento. No hacerlo puede resultar en una discrepancia entre las poses de los brazos líder y seguidor durante la teleoperación.
Agregar Cámara
Generalmente se recomienda instalar una cámara en la muñeca/pinza del brazo robótico, y otra cámara en la superficie del escritorio, para asegurar una cobertura adecuada de la postura del brazo. El enfoque de instalación específico depende de su escenario de aplicación; el ejemplo mostrado a continuación es solo para referencia.
Para más detalles, consulte la subsección del siguiente enlace:
https://wiki.seeedstudio.com/es/lerobot_so100m_new/#add-cameras
Recolección de Datos
Después de completar tanto la instalación de la cámara como la calibración del brazo robótico, el procedimiento de recolección del conjunto de datos se puede encontrar en la subsección del siguiente enlace:
https://wiki.seeedstudio.com/es/lerobot_so100m_new/#record-the-dataset
Visualización de Datos Recopilados
Para visualizar los datos recopilados en el SO-ARM, consulte la subsección del siguiente enlace:
https://wiki.seeedstudio.com/es/lerobot_so100m_new/#visualize-the-dataset
Entrenamiento de Políticas
Basado en los datos recopilados, el procedimiento para entrenar una Política se puede encontrar en la subsección del siguiente enlace:
https://wiki.seeedstudio.com/es/lerobot_so100m_new/#train-a-policy
En las siguientes secciones, introduciremos una plataforma de entrenamiento basada en la nube y demostraremos el uso básico. Puede elegir completar el entrenamiento de manera más eficiente en el servidor remoto.
Si elige entrenar la política en la nube, asegúrese de que su conjunto de datos esté subido al servidor en la nube con anticipación, o descargado desde Hugging Face Hub. Sin embargo, debido a posibles problemas de red al descargar directamente desde Hugging Face Hub, se recomienda encarecidamente subir manualmente el conjunto de datos a su servidor en la nube.
Usar NVIDIA Brev para entrenar políticas
NVIDIA Brev proporciona acceso simplificado a instancias de GPU NVIDIA en plataformas de nube populares, configuración automática del entorno y opciones de implementación flexibles, permitiendo a los desarrolladores comenzar a experimentar instantáneamente.
URL de acceso a la plataforma: https://login.brev.nvidia.com/signin
Necesitará registrar una cuenta para usar la plataforma. Esta sección introduce el uso básico de la plataforma de entrenamiento.
Habilitación de la Plataforma de Entrenamiento Basada en la Nube
Instrucciones Paso a Paso
- Crear una Instancia de Servidor en la Nube - paso 1
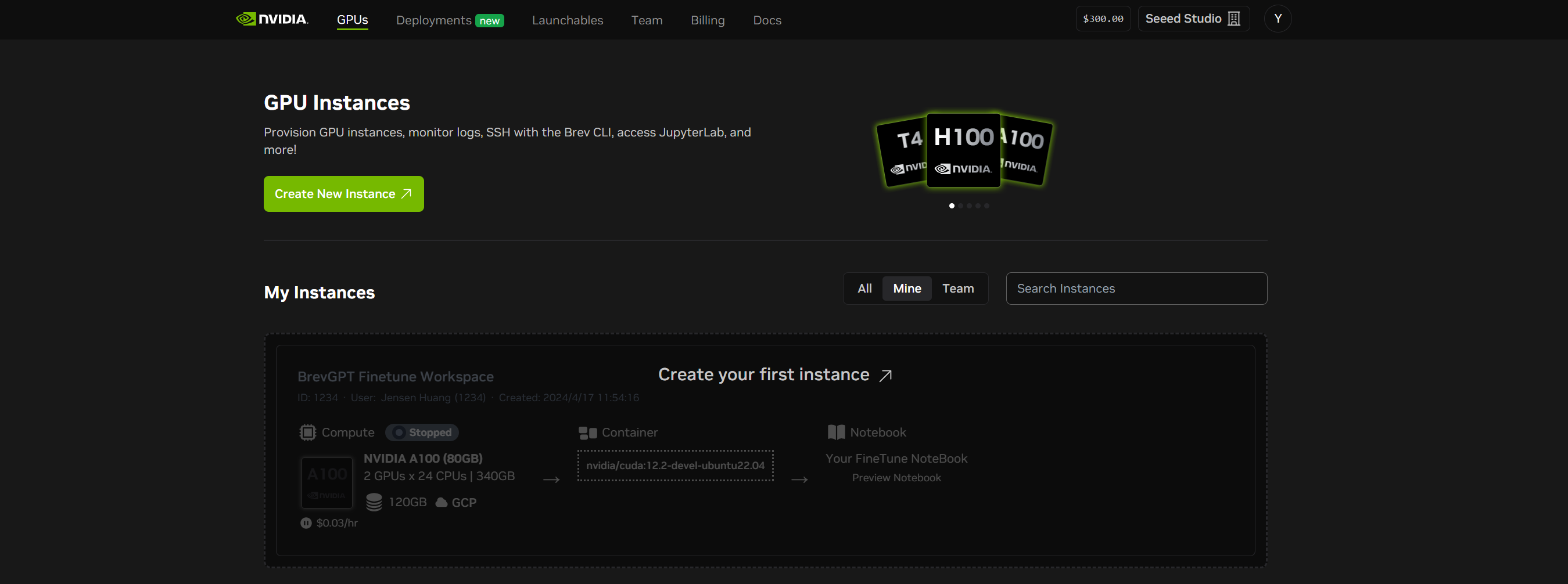
- Crear una Instancia de Servidor en la Nube - paso 2
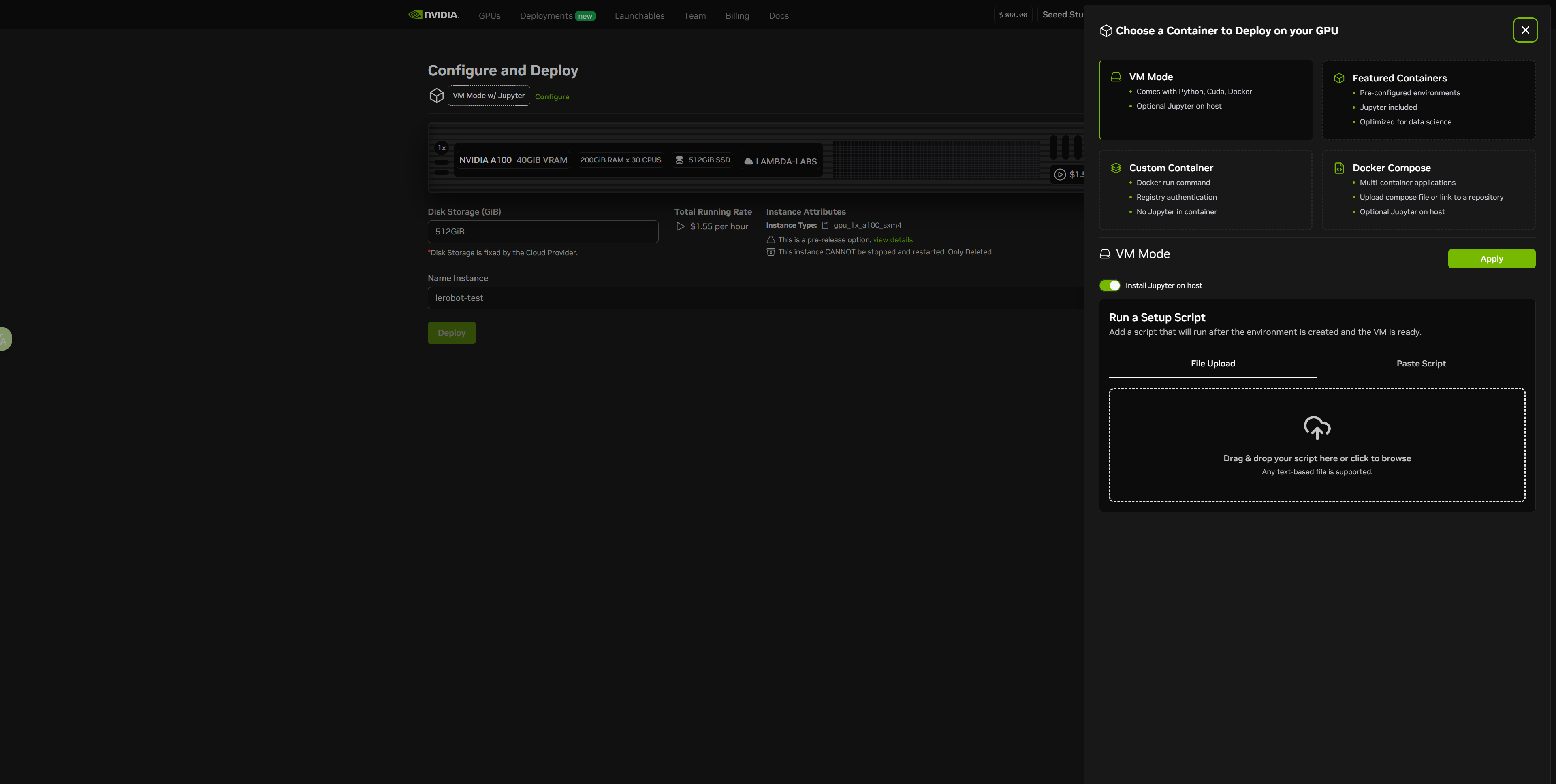
- Crear una Instancia de Servidor en la Nube - paso 3
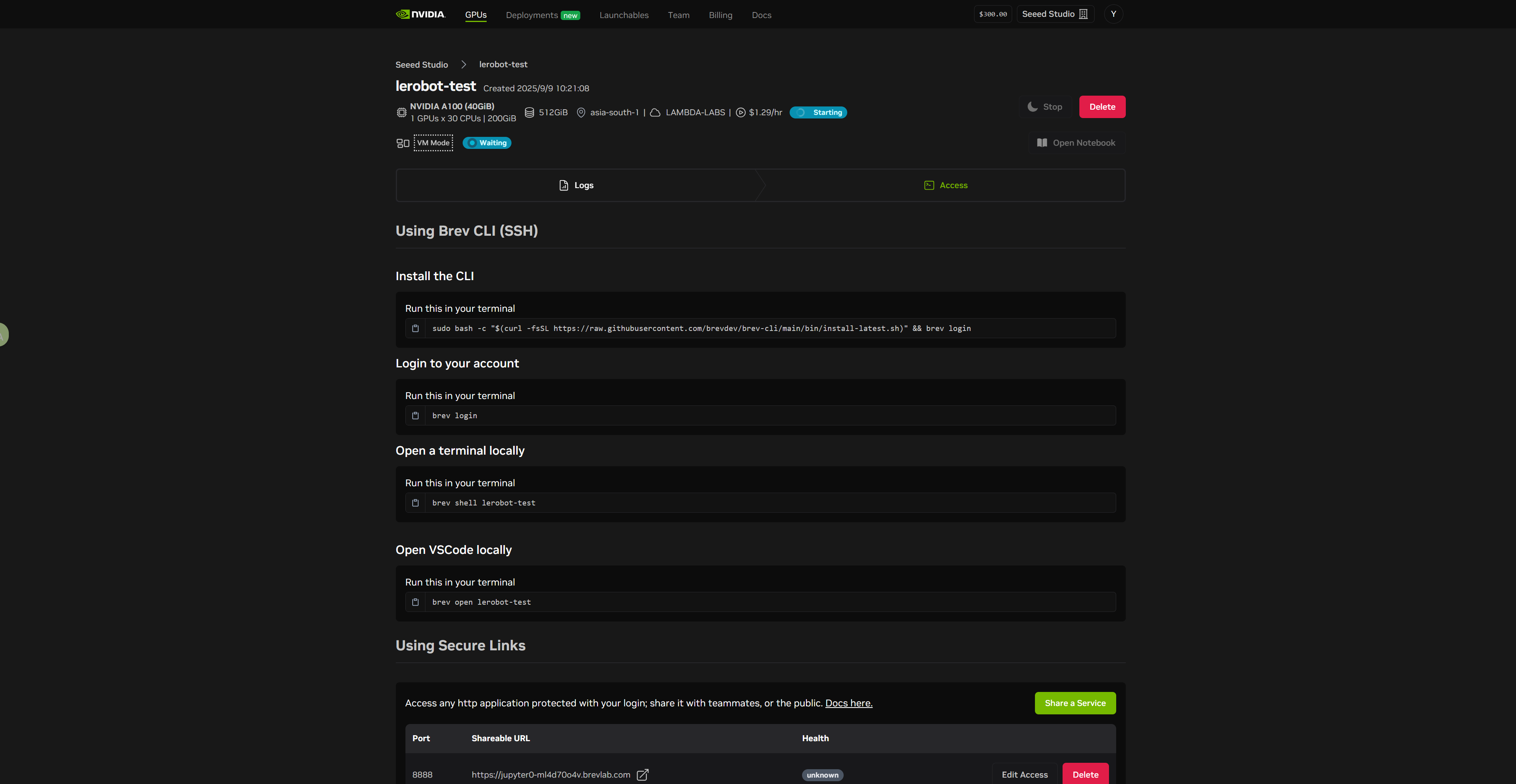
Lanzar el Jupyter Notebook Basado en Web:

Entrenamiento del Modelo y Exportación desde el Servidor
Los desarrolladores pueden entrenar modelos directamente dentro del terminal del notebook. A continuación se muestra un ejemplo para entrenar un GR00T N1.5 y exportarlo desde el servidor después.
Instalar Conda en el servidor:
mkdir -p ~/miniconda3
cd miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
source ~/miniconda3/bin/activate
conda init --all
Clonar el Repositorio Isaac-GR00T:
git clone https://github.com/NVIDIA/Isaac-GR00T
cd Isaac-GR00T
Crear el entorno gr00t:
conda create -n gr00t python=3.10
conda activate gr00t
pip install --upgrade setuptools
pip install -e .[base]
pip install --no-build-isolation flash-attn==2.7.1.post4
Si entrena o ajusta GR00T en una plataforma de nube, debe usar una GPU con arquitectura Ampere o más nueva (por ejemplo, RTX A6000 o GeForce RTX 4090). V100 (Volta) no es compatible para el entrenamiento o ajuste fino de GR00T.
Para más detalles sobre el ajuste fino del modelo, consulte: https://huggingface.co/blog/nvidia/gr00t-n1-5-so101-tuning#:~:text=1.2%20Configure%20Modality%20File
Ajuste fino del modelo GR00T N1.5:
python scripts/gr00t_finetune.py \
--dataset-path ./demo_data/so101-table-cleanup/ \
--num-gpus 1 \
--output-dir ./so101-checkpoints \
--max-steps 10000 \
--data-config so100_dualcam \
--video-backend torchvision_av
La configuración predeterminada de ajuste fino requiere ~25G de VRAM. Si no tiene tanta VRAM, intente agregar la bandera --no-tune_diffusion_model al script gr00t_finetune.py.
Si desea entrenar o ajustar Gr00t en un servidor, puede consultar este enlace.
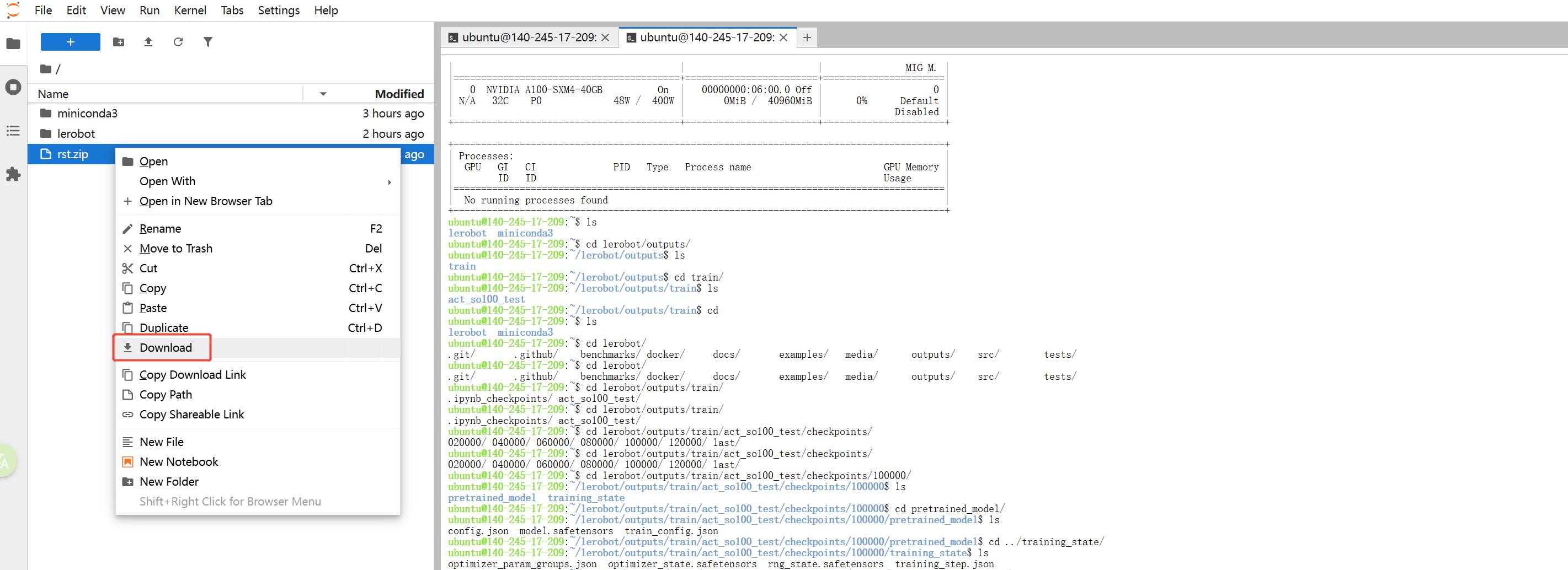
Después de que se complete el entrenamiento, es posible que desee descargar el modelo a su máquina local. Pero la barra lateral de Jupyter Notebook no admite navegación directa a las carpetas de entrenamiento del modelo.
La solución es: Primero comprima la carpeta objetivo en un archivo .zip o .tar.gz, luego descargue el archivo comprimido a través de la interfaz del notebook. Consulte la figura a continuación para ver un ejemplo.
Inferencia de Isaac GR00T N1.5 en Thor
Jetson AGX Thor, como una poderosa plataforma de computación de borde y despliegue, proporciona recursos suficientes para soportar inferencia de modelos a gran escala. En esta sección, basándonos en el contenido previamente introducido, demostramos cómo ejecutar inferencia para GR00T N1.5 en Thor.
GR00T N1.5 es un sistema base de código abierto lanzado por NVIDIA Research en el campo del aprendizaje robótico. Su objetivo es proporcionar un marco unificado para el entrenamiento e inferencia de IA encarnada, enfocándose particularmente en el aprendizaje por imitación y el aprendizaje de políticas impulsado por modelos a gran escala.
Preparación
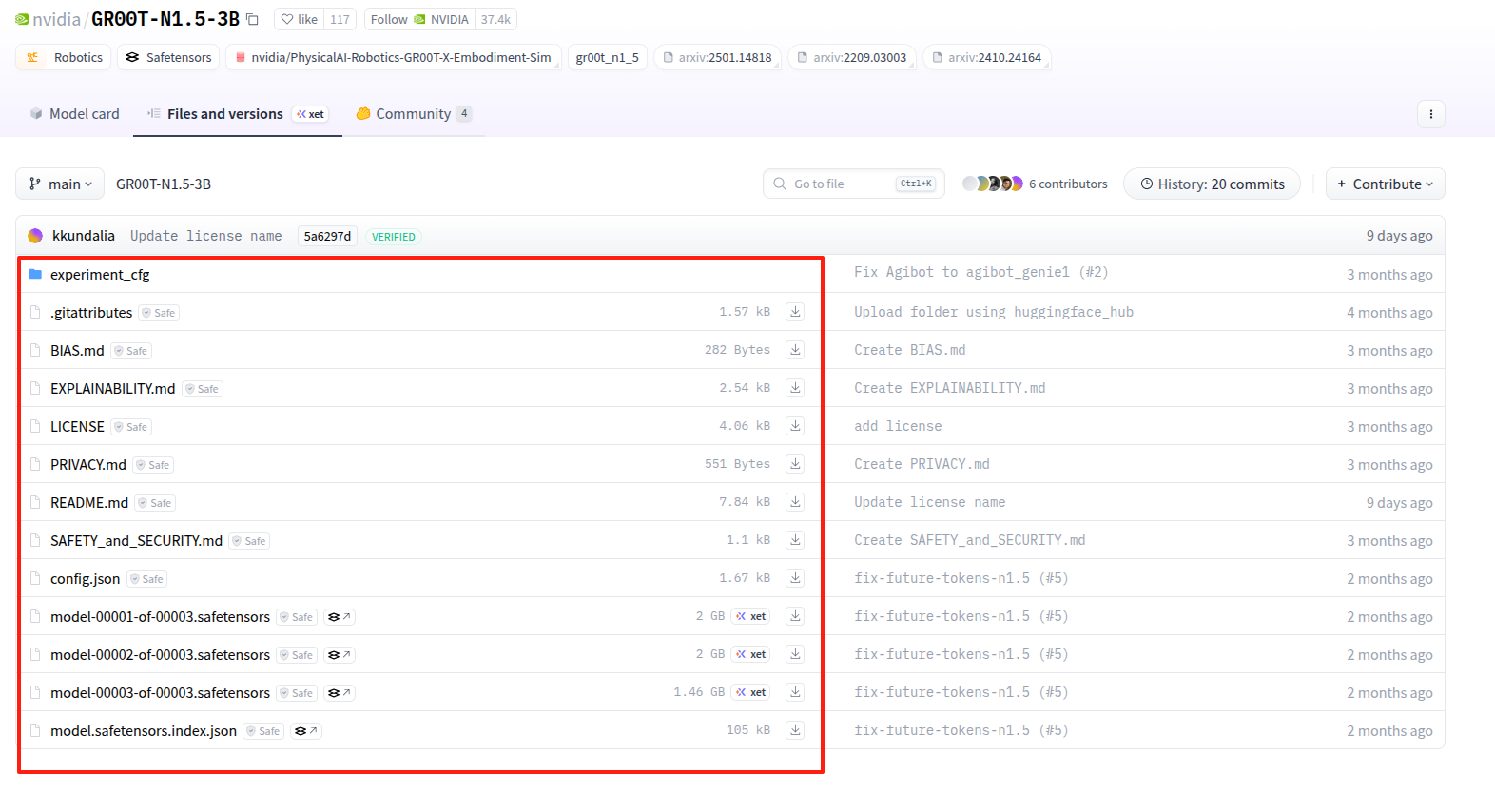
Los modelos preentrenados de GR00T N1.5 están disponibles a través de Hugging Faces. Puedes descargarlos desde el siguiente enlace:
https://huggingface.co/nvidia/GR00T-N1.5-3B/tree/main
Todas las dependencias requeridas para la inferencia de GR00T han sido preconfiguradas en una imagen Docker dedicada.
Usa el siguiente comando para iniciar el contenedor:
sudo docker run --rm -it \
--network=host \
-e NVIDIA_DRIVER_CAPABILITIES=compute,utility,video,graphics \
--runtime nvidia \
--privileged \
-v /tmp/.X11-unix:/tmp/.X11-unix \
-v /etc/X11:/etc/X11 \
--device /dev/nvhost-vic \
-v /dev:/dev \
lerobot:r38.2.aarch64-cu130-24.04
Clona el código fuente de Gr00t con Git e instálalo:
git clone https://github.com/NVIDIA/Isaac-GR00T.git
cd Isaac-GR00T
pip install --upgrade setuptools
pip install -e .[thor]
Gr00t es completamente compatible con los conjuntos de datos recopilados usando el framework lerobot. Consulta la sección anterior "Recopilación de Datos" para preparar tu conjunto de datos para el ajuste fino del modelo Gr00t.
Ajuste Fino del Modelo (opcional)
Si ya has realizado el ajuste fino de GR00T N1.5 en NVIDIA Brev, puedes omitir este paso en Thor.
El proceso de ajuste fino puede ejecutarse tanto en la plataforma de entrenamiento en la nube proporcionada como directamente dentro del contenedor Docker en Thor.
Si no has descargado ningún modelo GR00T preentrenado y no planeas usar una versión personalizada, puedes usar el siguiente comando para realizar el ajuste fino basado en los pesos de Hugging Face:
python scripts/gr00t_finetune.py \
--dataset-path ./demo_data/so101-table-cleanup/ \
--num-gpus 1 \
--output-dir ./so101-checkpoints \
--max-steps 10000 \
--data-config so100_dualcam \
--video-backend torchvision_av
Este script descargará automáticamente el modelo GR00T preentrenado desde Hugging Face y comenzará el proceso de ajuste fino.
Si deseas usar un modelo GR00T preentrenado almacenado localmente, modifica el comando de la siguiente manera:
python scripts/gr00t_finetune.py \
--dataset-path ./demo_data/so101-table-cleanup/ \
--num-gpus 1 \
--output-dir ./so101-checkpoints \
--max-steps 10000 \
--data-config so100_dualcam \
--video-backend torchvision_av \
--base-model-path ./pretrained/GR00T-N1.5-3
--dataset-path es la ruta del archivo de datos de recopilación de SO-ARM.
La configuración predeterminada de ajuste fino requiere ~25G de VRAM. Si no tienes tanta VRAM, intenta agregar la bandera --no-tune_diffusion_model al script gr00t_finetune.py.
Ejecutando Inferencia con GR00T N1.5
Para lograr un rendimiento óptimo, se recomienda replicar lo más fielmente posible la configuración del mundo real utilizada durante la recopilación de datos al desplegar modelos GR00T con ajuste fino. Esto se debe a que las capacidades de generalización del modelo son limitadas.

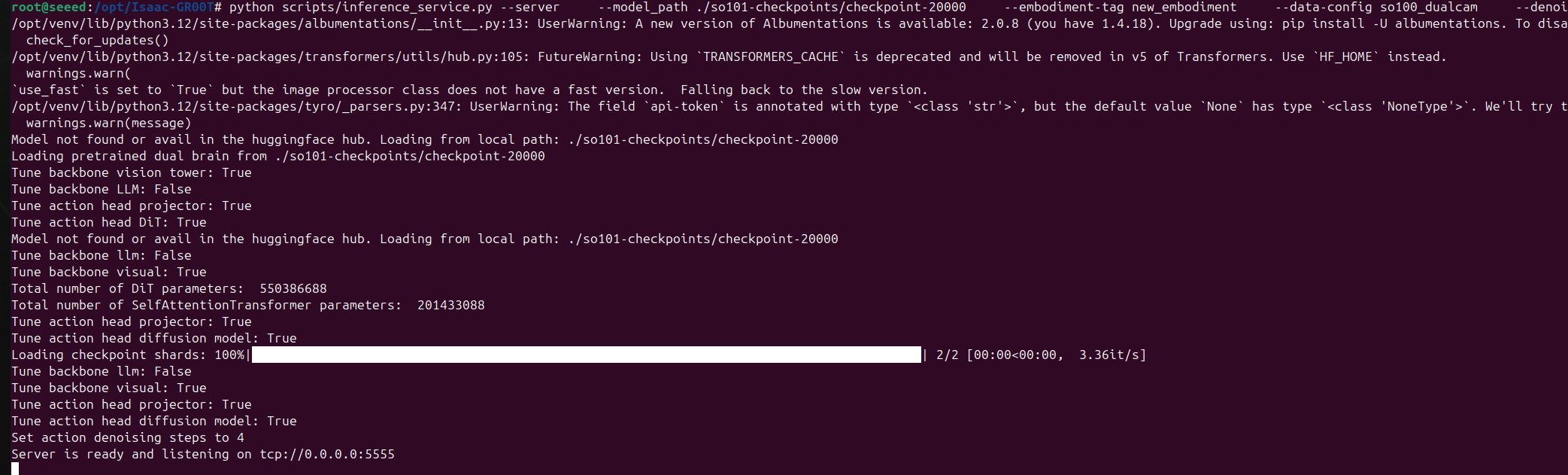
Dentro del contenedor Docker, abre una terminal y lanza el servicio de inferencia de GR00T:
python scripts/inference_service.py --server \
--model_path ./so101-checkpoints \
--embodiment-tag new_embodiment \
--data-config so100_dualcam \
--denoising-steps 4
Al lanzarse exitosamente, la terminal debería mostrar registros similares a:
Abre otra terminal y usa el siguiente comando para entrar al mismo contenedor desde un shell diferente:
sudo docker exec -it <container id> /bin/bahs
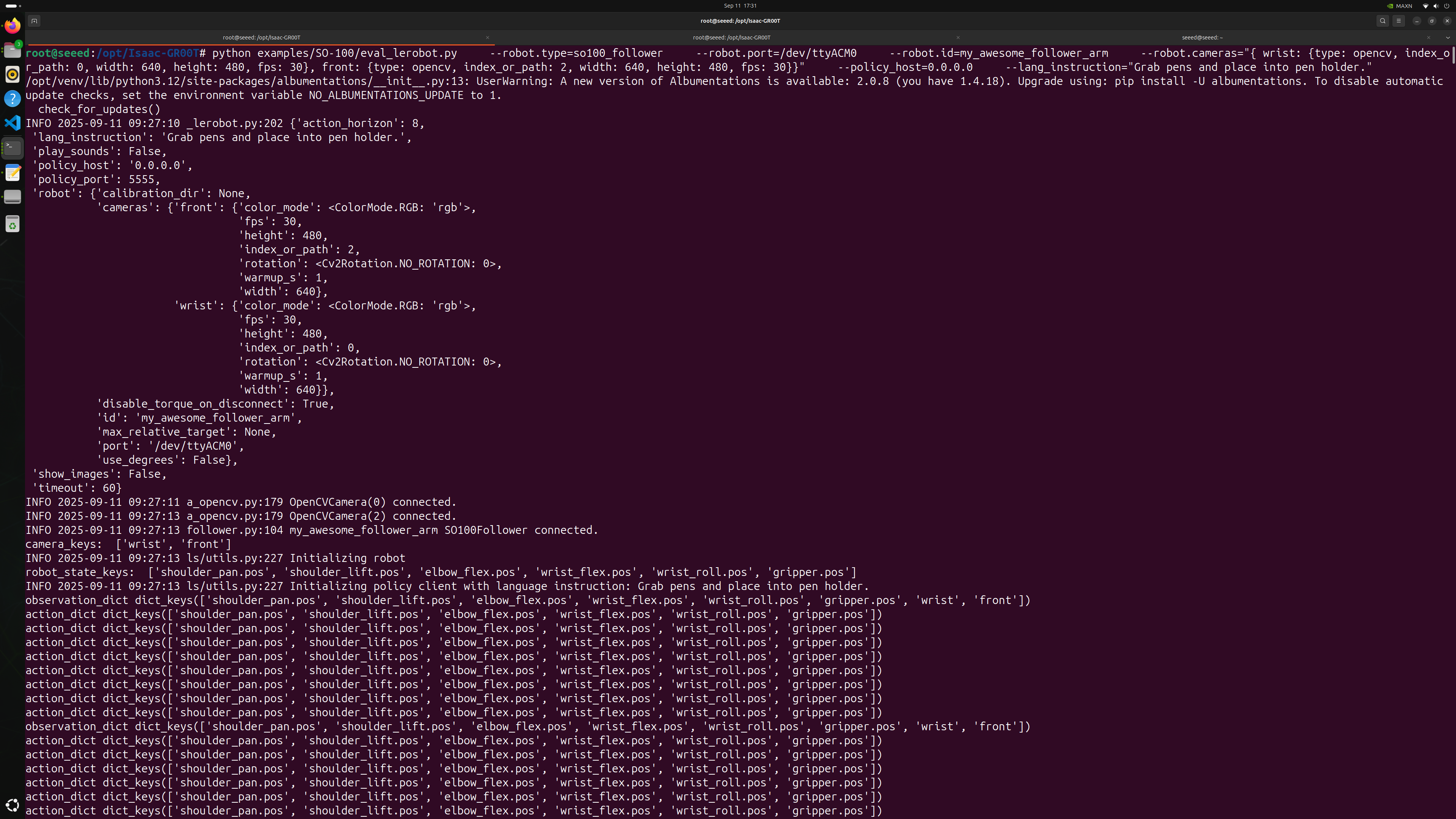
Luego, en este segundo shell, inicia el cliente de inferencia:
python examples/SO-100/eval_lerobot.py \
--robot.type=so100_follower \
--robot.port=/dev/ttyACM0 \
--robot.id=my_awesome_follower_arm \
--robot.cameras="{ wrist: {type: opencv, index_or_path: 0, width: 640, height: 480, fps: 30}, front: {type: opencv, index_or_path: 2, width: 640, height: 480, fps: 30}}" \
--policy_host=0.0.0.0 \
--lang_instruction="Grab pens and place into pen holder."
Reemplaza index_or_path con el número de índice de tu cámara; puedes encontrarlo ejecutando ls /dev/video*.
Cuando el proceso del cliente se inicie exitosamente, debería aparecer la siguiente salida:
Durante la primera ejecución del proceso del cliente, debes calibrar los servos del brazo. El proceso de calibración es el mismo que se describió anteriormente.
Asegúrate de que cada articulación se mueva a su rango completo de movimiento para garantizar un comportamiento adecuado de teleoperación e inferencia.
Una vez que todo esté configurado, GR00T N1.5 puede desplegarse exitosamente en Jetson AGX Thor. El sistema y el entorno de hardware ahora están verificados para soportar inferencia completa:
FAQ
P1: ¿La herramienta Brev CLI no funciona en la plataforma de entrenamiento en la nube?
Esto a menudo se debe a problemas de red.
Puedes instalar e iniciar sesión en Brev CLI en tu host Ubuntu local, luego intentar conectarte a tu instancia en la nube usando SSH desde tu terminal local.
P2: ¿Cómo subo datos a la plataforma de entrenamiento?
Usa el siguiente comando: scp <ruta-archivo-local> <nombre-instancia-brev>:<ruta-archivo-remoto>, por ejemplo scp -r ./record_2_cameras/ gr00t-trainer:/home/ubuntu/Datasets
P3: La pantalla de Thor se pone negra una vez que comienza la instalación
Si usas una memoria USB de instalación de Jetson en un Kit de Desarrollador Jetson AGX Thor que ha sido usado o configurado previamente, necesitas habilitar SoC Display Hand-Off en el menú de configuración UEFI.
De hecho, el flasheo continúa en segundo plano durante este tiempo; después de un rato, aparecerá el escritorio de Ubuntu.
P4: No tengo salida de video en el monitor (conectado a través de un KVM)
Se sabe que algunos switches/dispositivos KVM no manejan bien la salida de video del Kit de Desarrollador Jetson AGX Thor. Por favor conecta el monitor directamente al Kit de Desarrollador Jetson AGX Thor.
P5: Después de flashear Thor, HDMI a veces no muestra señal en arranques posteriores
Una solución que ha demostrado ser efectiva es cambiar al conector DisplayPort (DP) para la salida de pantalla.
P6: No se detecta entrada de teclado durante el flasheo de la imagen de Thor
Recomendamos usar un teclado con cable durante el flasheo. Los teclados inalámbricos pueden tener compatibilidad limitada durante el proceso de flasheo de Thor.
P7: El ajuste fino en la nube de GR00T reporta "GPU no soportada"
No uses GPUs anteriores a la arquitectura Ampere para el ajuste fino en la nube de GR00T. (ej., RTX A6000 o GeForce RTX 4090). V100 (Volta) no es compatible para entrenamiento o ajuste fino de GR00T.
P8: El nombre del dispositivo serie para la placa controladora del brazo robótico no aparece bajo /dev
El sistema Thor de fábrica no incluye controladores CH34x. Si faltan, instálalos desde:
https://github.com/juliagoda/CH341SER
P9: El puerto Type-C en Thor no reconoce un hub externo
Para usar un hub externo a través del Type-C de Thor, conéctalo al puerto Type-C más cercano al conector QSFP28. (Ambos puertos Type-C proporcionan energía, pero solo el especificado soporta el hub de manera confiable.)
P10: Al flashear con una tarjeta de captura, el sistema luego dice que la contraseña del usuario es incorrecta
Al usar un escritorio de tarjeta de captura durante el flasheo, puede ocurrir un error de entrada de teclado (la entrada no coincide con lo que se escribe). Verifica dos veces la contraseña del usuario mientras la estableces.
P11: ¿Dónde está el puerto de depuración de Thor?
El puerto de depuración Type-C de Thor está oculto bajo la cubierta magnética. Pueden crearse múltiples nodos de dispositivo serie; usa el que tenga el índice más pequeño para iniciar sesión en Thor vía serie.
P12: No se pueden ejecutar scripts de LeRobot para inferir ACT en la imagen de GR00T
No recomendamos invocar APIs de LeRobot para inferencia de ACT en un entorno Python 3.12. Los scripts de Calibration y find port están bien. Ten en cuenta que Ubuntu 24 usa Python 3.12 por defecto localmente.
P13: ¿Cómo verificar la utilización de SM de GPU en Thor?
Ejecuta:
nvidia-smi dmon -s puc
Verifica la columna sm en la salida.
P14: No se pueden leer datos del puerto serie del controlador del brazo robótico
No conectes la cámara antes que la placa controladora SO-ARM; hacerlo puede causar un mapeo incorrecto del dispositivo serie. También asegúrate de que se hayan otorgado los permisos del puerto serie.
Referencias
- https://developer.nvidia.com/embedded/jetpack
- https://huggingface.co/blog/nvidia/gr00t-n1-5-so101-tuning
Soporte Técnico y Discusión del Producto
¡Gracias por elegir nuestros productos! Estamos aquí para brindarte diferentes tipos de soporte para asegurar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para atender diferentes preferencias y necesidades.