Detección de armas de fuego con NVR Frigate en R2000
Introducción
Frigate NVR es un grabador de video en red de código abierto diseñado para análisis de video en tiempo real con IA en el borde. Desplegado en una caja de IA reComputer con Hailo, el sistema ingiere localmente múltiples flujos de cámara, ejecuta un modelo cuantitativo de detección de objetos y emite eventos MQTT en milisegundos, eliminando la latencia de la nube y los costos de ancho de banda.
Para este despliegue, expandimos la biblioteca de modelos existente de Frigate y agregamos un modelo personalizado yolov11s específicamente ajustado para el reconocimiento de pistolas y rifles. Cuando se detecta un arma de fuego, el motor de reglas de Frigate inmediatamente activa una alerta, dando a los equipos de seguridad segundos preciosos para bloquear el área y coordinar una respuesta antes de que la amenaza escale.
Prerrequisitos
Requisitos de Hardware
| reComputer AI Industrial R2000 | reComputer AI R2000 |
|---|---|
 |  |
Configurando Frigate
Modificando la Configuración PCIe
Abriendo config.txt:
sudo nano /boot/firmware/config.txt
Añade lo siguiente a config.txt:
dtparam=pciex1_gen=3
dtoverlay=pciex1-compat-pi5,no-mip
Luego guarda el archivo usando Ctrl+x y reinicia la caja de IA.
Instalar Docker y hailo-all
sudo apt update
sudo apt install hailo-all
curl -fsSL https://get.docker.com -o get-docker.sh
sudo sh get-docker.sh
sudo usermod -aG docker $USER
sudo apt install docker-compose-plugin
Creando un archivo yml
Crea el archivo frigate.yml para que Docker Compose pueda ejecutar Frigate.
cd ~
sudo nano frigate.yml
Aquí hay un ejemplo de frigate.yml:
services:
frigate-hailo:
container_name: frigate-hailo
privileged: true
restart: unless-stopped
image: ghcr.io/blakeblackshear/frigate:0.16.0-beta3-standard-arm64
shm_size: "512mb" # calculate on your own
stop_grace_period: 30s # allow enough time to shut down the various services
devices:
- /dev/hailo0:/dev/hailo0
- /dev/video19:/dev/video19 # USB camera (physical device)
- /dev/video20:/dev/video20 # USB camera backup device
volumes:
- /etc/localtime:/etc/localtime:ro
- ./config/:/config
- ./data/db/:/data/db
- ./data/storage:/media/frigate
- ./media:/media/frigate # Mapping local media files to the container
- type: tmpfs
target: /tmp/cache
tmpfs:
size: 1g
ports:
- 5000:5000
environment:
- FRIGATE_RTSP_PASSWORD=password
- LIBVA_DRIVER_NAME=i965
group_add:
- "44" # video group
Descarga el video del caso:
mkdir media && cd media
wget -c \
"https://files.seeedstudio.com/wiki/reComputer/Application/Firearm_Detection_With_Frigate_NVR_on_R2130/model_cache/yolov11s.hef"
Descarga el modelo YOLO y crea config.yml:
cd .. && mkdir config && cd config && mkdir model_cache
cd model_cache && wget https://hailo-model-zoo.s3.eu-west-2.amazonaws.com/ModelZoo/Compiled/v2.14.0/hailo8/yolov8n.hef
cd .. && nano config.yml
El siguiente es un ejemplo de config.yml:
database:
path: /data/db/frigate.db
go2rtc:
streams:
# USB camera streaming
usb_camera:
- "ffmpeg:/dev/video0#input=-f v4l2 -input_format mjpeg -video_size 640x480 -framerate 15"
# RTSP stream configuration
hikvision_main:
- "rtsp://admin:[email protected]:554/h264/ch1/main/av_stream"
# Video file streaming - close.mp4
video_files_close:
- "ffmpeg:/media/frigate/close.mp4"
# Video file streaming - close2.mp4
video_files_close2:
- "ffmpeg:/media/frigate/close2.mp4"
# Video file streaming - y4.mp4
video_files_y4:
- "ffmpeg:/media/frigate/y4.mp4"
# Video file streaming - y5.mp4
video_files_y5:
- "ffmpeg:/media/frigate/y5.mp4"
cameras:
# USB camera
usb_camera:
ffmpeg:
inputs:
- path: /dev/video0
input_args: -f v4l2 -input_format mjpeg -video_size 640x480 -framerate 15
roles:
- record
- detect
detect:
width: 640
height: 480
fps: 3
record:
enabled: true
retain:
days: 7
mode: motion
objects:
track:
- gun
filters:
gun:
min_area: 10
max_area: 100000
threshold: 0.25
# Video file camera - close.mp4
video_files_close:
ffmpeg:
inputs:
- path: /media/frigate/close.mp4
input_args: -stream_loop -1 -re
roles:
- detect
- record
detect:
width: 1280
height: 720
fps: 2
record:
enabled: false
retain:
days: 3
mode: all
objects:
track:
- gun
filters:
gun:
min_area: 20
max_area: 500000
threshold: 0.25
# Video file camera - close2.mp4
video_files_close2:
ffmpeg:
inputs:
- path: /media/frigate/close2.mp4
input_args: -stream_loop -1 -re
roles:
- detect
- record
detect:
width: 1280
height: 720
fps: 2
record:
enabled: false
retain:
days: 3
mode: all
objects:
track:
- gun
filters:
gun:
min_area: 20
max_area: 500000
threshold: 0.25
# Video file camera - y4.mp4
video_files_y4:
ffmpeg:
inputs:
- path: /media/frigate/y4.mp4
input_args: -stream_loop -1 -re
roles:
- detect
- record
detect:
width: 1280
height: 720
fps: 3
record:
enabled: true
retain:
days: 3
mode: all
objects:
track:
- gun
filters:
gun:
min_area: 10
max_area: 500000
threshold: 0.3
# Video file camera - y5.mp4
video_files_y5:
ffmpeg:
inputs:
- path: /media/frigate/y5.mp4
input_args: -stream_loop -1 -re
roles:
- detect
- record
detect:
width: 1280
height: 720
fps: 3
record:
enabled: true
retain:
days: 3
mode: all
objects:
track:
- gun
filters:
gun:
min_area: 10
max_area: 500000
threshold: 0.25
# RTSP IP camera - hikvision
hikvision_main:
ffmpeg:
inputs:
- path: rtsp://admin:[email protected]:554/h264/ch1/main/av_stream
input_args: -rtsp_transport tcp -avoid_negative_ts make_zero
roles:
- detect
- record
detect:
width: 1920
height: 1080
fps: 3
record:
enabled: true
retain:
days: 7
mode: motion
objects:
track:
- gun
filters:
gun:
min_area: 20
max_area: 500000
threshold: 0.25
mqtt:
enabled: false
objects:
track:
- gun
filters:
gun:
min_area: 10
max_area: 500000
threshold: 0.25
detectors:
hailo8l:
type: hailo8l
device: PCIe
model:
width: 640
height: 640
input_tensor: nhwc
input_pixel_format: rgb
input_dtype: int
model_type: yolo-generic
path: /config/model_cache/yolov11s.hef
labelmap:
0: person
1: gun
detect:
enabled: true
snapshots:
enabled: true
clean_copy: true
timestamp: true
bounding_box: true
crop: false
retain:
default: 14
quality: 95
record:
enabled: true
retain:
days: 30
mode: all
ui:
timezone: Asia/Shanghai
auth:
enabled: false
live:
height: 720
quality: 8
birdseye:
enabled: true
width: 1280
height: 720
quality: 8
mode: objects
version: 0.16-0
semantic_search:
enabled: false
reindex: false
model_size: small
face_recognition:
enabled: false
lpr:
enabled: false
Ejecutar el proyecto
Descargar y ejecutar el proyecto:
cd ~
sudo docker pull mjqx2023/frigate_seeed
docker compose -f frigate.yml up -d
Luego abre localhost:5000 en el navegador web de la caja AI:
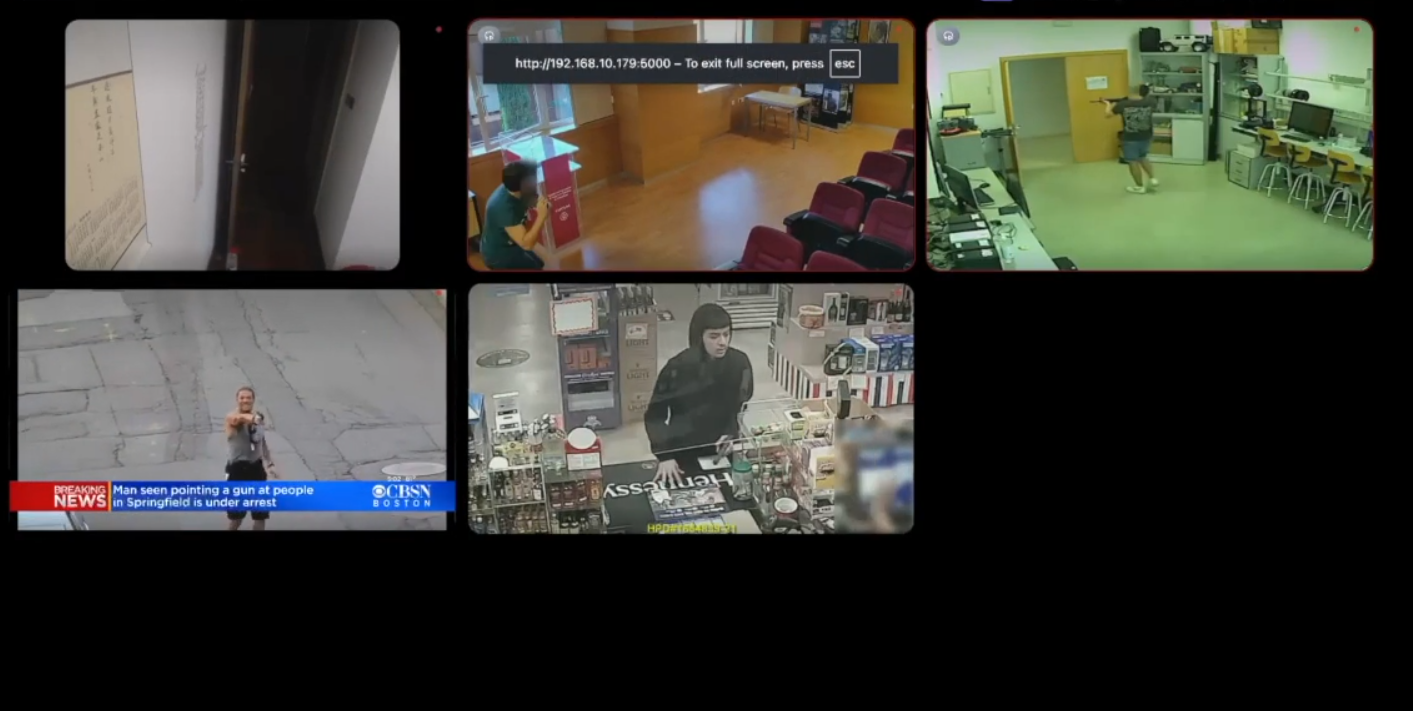
Selecciona uno de los videos para comenzar la depuración, selecciona la caja de visualización, y los resultados se mostrarán automáticamente:

Cambia de pestañas para ver los resultados de pruebas anteriores:
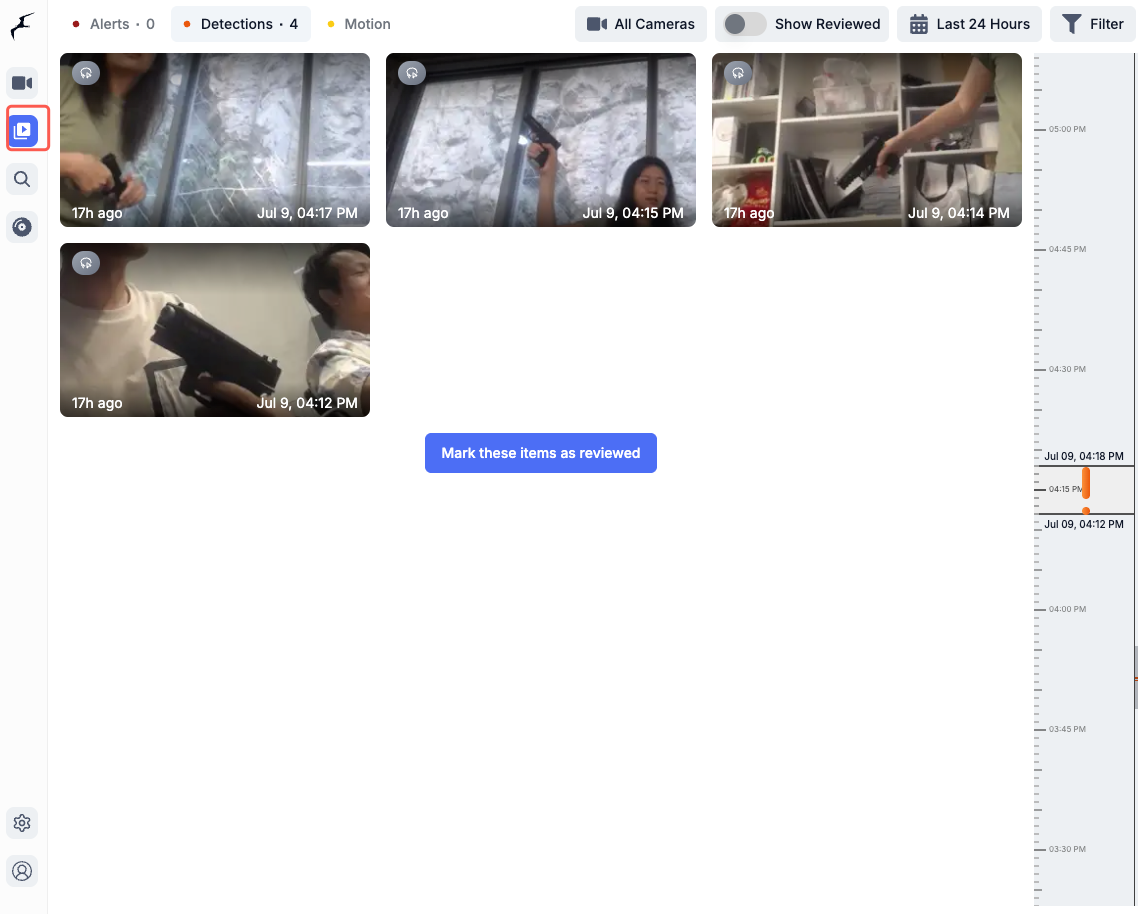
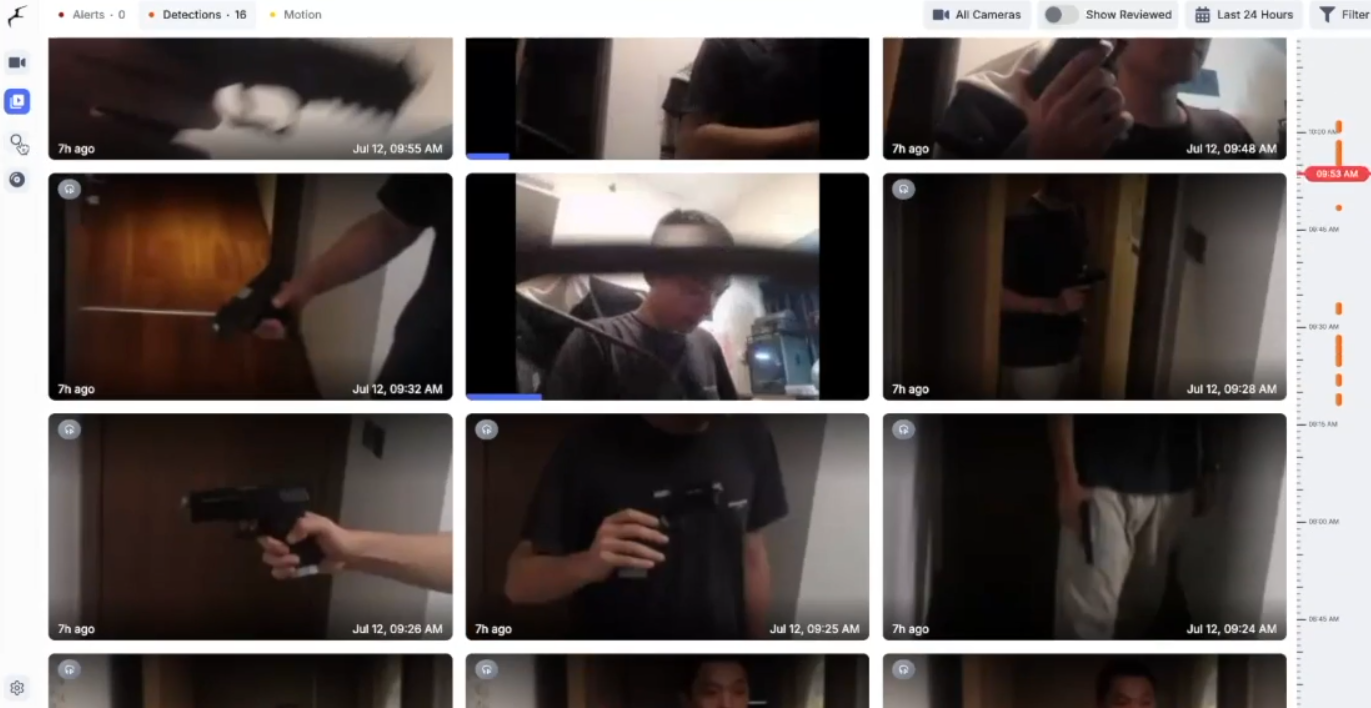
Resultado
Cuando ve a alguien sosteniendo un arma, el modelo la identificará y la seleccionará. Cambia al modo de depuración, selecciona la caja de visualización, y los resultados se mostrarán automáticamente; cambia de pestañas para ver los resultados de detección anteriores.
Otras configuraciones
| Configuración de otras fuentes de video | Configuración de velocidad de fotogramas |
|---|---|
| Frigate soporta RTSP, transmisión de video y cámaras USB. Una vez que el archivo de configuración esté configurado, tomará efecto después del reinicio. | El archivo de configuración puede configurar la velocidad de fotogramas de detección de cada cámara, lo cual tomará efecto después del reinicio. |
| Puedes acceder a las opciones de configuración en Configuración, como cambiar la ruta RTSP para conectar a una cámara RTSP. Una vez que hayas hecho cambios, haz clic en Guardar y Reiniciar en la esquina superior derecha para que los cambios tomen efecto. | 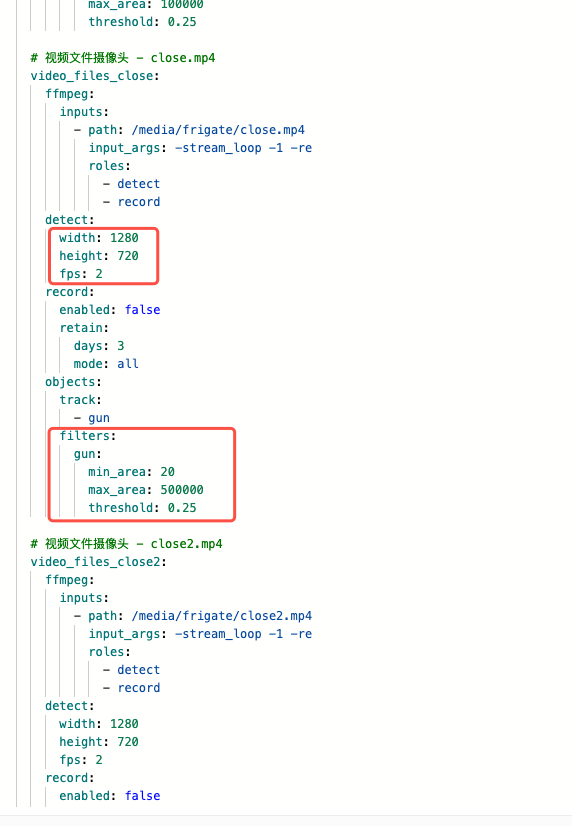 |
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarte diferentes tipos de soporte para asegurar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para satisfacer diferentes preferencias y necesidades.