Introducción al uso del kit de sensor de detección de respiración y latidos cardíacos mmWave de 60GHz con XIAO ESP32C6 (MR60BHA2)

Presentamos nuestros avanzados módulos de sensor mmWave para XIAO, diseñados para ofrecer soluciones de monitorización de vanguardia tanto para detección de caídas como para monitorización de latidos cardíacos. Impulsados por el robusto microcontrolador XIAO ESP32 con conectividad Wi‑Fi y Bluetooth integrada, estos módulos ofrecen capacidades de detección precisas y fiables. Tanto si necesitas monitorizar caídas en tiempo real como seguir los latidos con alta sensibilidad, nuestros módulos están equipados con tecnología de última generación, incluidos LED RGB personalizables y detección de luz ambiental. Con opciones de expansión sencillas mediante puertos Grove GPIO, estos versátiles módulos son perfectos para una amplia gama de aplicaciones, desde la integración en hogares inteligentes hasta la monitorización sanitaria.
Características
- Wi-Fi y Bluetooth habilitados: Ambos módulos están impulsados por XIAO ESP32 con firmware ESPHome pregrabado, lo que garantiza una configuración y personalización rápidas.
- Módulo de detección de latidos cardíacos:
- Monitorización sensible de latidos: Detecta los latidos cardíacos hasta 1,5 metros.
- Detección de presencia estática: Supervisa a personas inmóviles hasta 6 metros de distancia.
- Detección ambiental:
- Sensor de luz BH1750: Mide la luz ambiental de 1 a 65.535 lux.
- LED RGB WS2812: LED personalizable para retroalimentación visual y proyectos DIY.
- Conectividad ampliable: Incluye puertos Grove GPIO para añadir sensores y módulos adicionales.
Especificaciones
| Parámetros generales | |
|---|---|
| Firmware mmWave | Detección de respiración y latidos cardíacos |
| Rango de detección | Detección de presencia humana estática: hasta 6 metros Detección de respiración y latidos cardíacos: 1,5 metros |
| MCU | Seeed Studio XIAO ESP32C6 |
| LED | LED RGB WS2812 |
| Botón | Rest |
| Sensor de luz | BH1750 Rango: de 1 a 65.535 lux con mediciones ajustables hasta 100.000 lux |
| Conectividad | 1 puerto GPIO (D0, D10) |
| Espaciado del pin header | 2,54 mm |
| Fuente de alimentación | Entrada 5V/1A |
| Consumo de energía | 0,5 W: modo de espera 0,8 W: modo de activación 1,4 W: funcionamiento con estado de Grove Relay |
Aplicaciones
- Sistemas de seguridad
- Monitorización sanitaria
- Automatización del hogar inteligente
- Cuidado de personas mayores
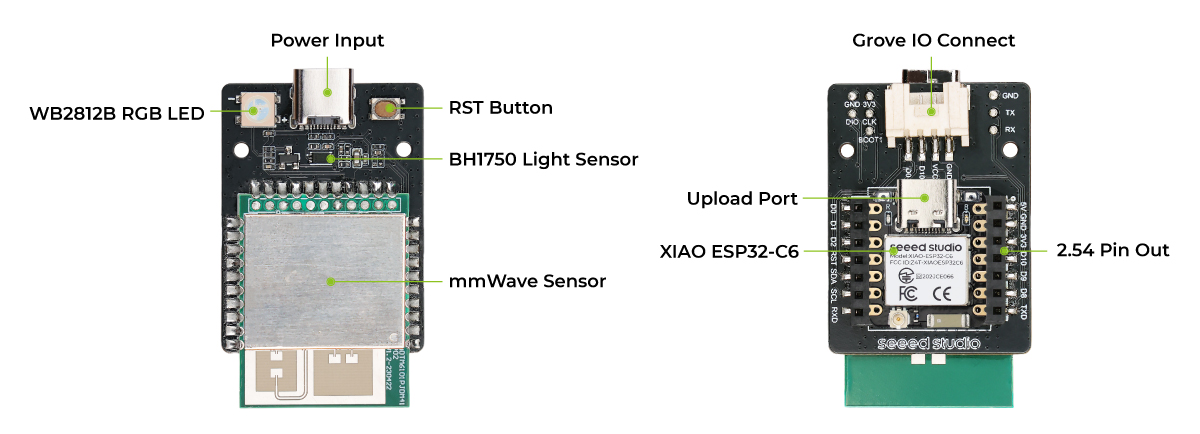
Descripción general del hardware
Primeros pasos
Método de instalación y rango de detección
Se recomienda utilizar el radar más reciente de frecuencia respiratoria y cardíaca únicamente en escenarios de sueño. Por favor, abstente de utilizar las funciones de frecuencia respiratoria y cardíaca del radar mientras estés sentado en un escritorio o haciendo ejercicio, ya que esto puede provocar inexactitudes significativas.
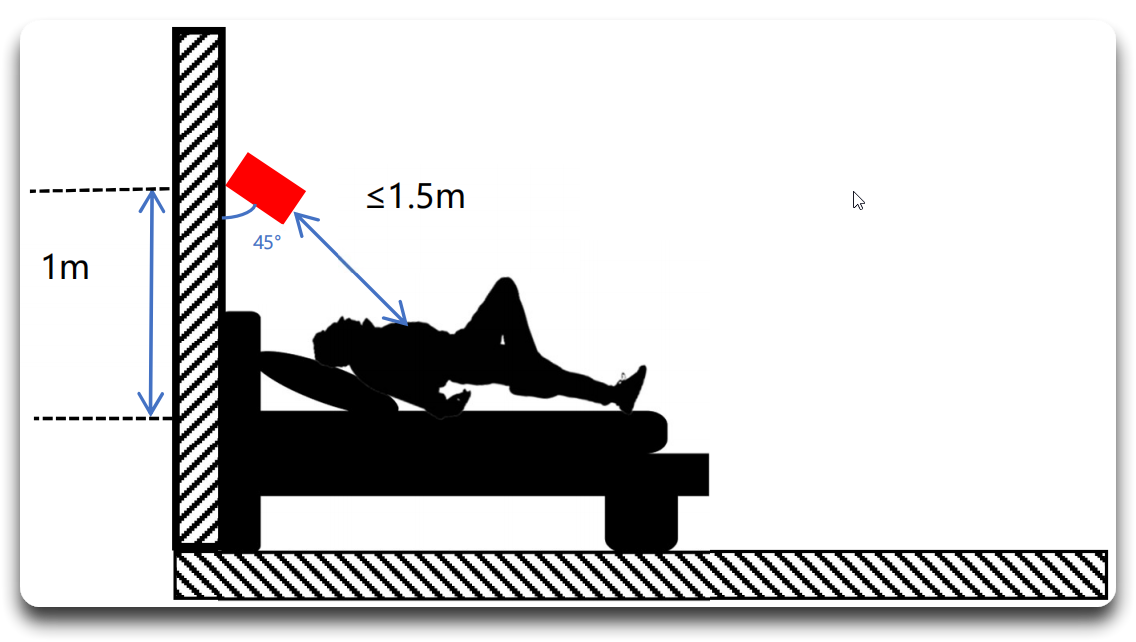
Instalación inclinada. Para necesidades de detección de respiración y frecuencia cardíaca durante el sueño, se puede adoptar un método de instalación inclinada. Se requiere instalar el radar a una altura de 1 m directamente sobre la cabecera de la cama, inclinado hacia abajo 45° hacia el centro de la cama, y controlar la distancia entre el radar y la cavidad torácica dentro de 1,5 m. La dirección normal del radar debe estar alineada con la posición principal de detección para garantizar que el radar pueda detectar los datos de respiración y latidos cardíacos.
Utiliza este módulo en un espacio abierto y evita las siguientes situaciones dentro del rango de detección para prevenir interferencias con el módulo:
- Varios radares instalados demasiado cerca
- El viento mueve las cortinas y balancea las plantas
- Flujo de agua y película de agua
- Grandes áreas de metal y reflejos de espejos
- Detección a través de vidrio y tableros de madera delgados
- Ubicaciones de instalación propensas a vibraciones
- Uso de fuentes de alimentación de baja calidad
Preparación de software (Arduino)
De forma predeterminada, el MR60BHA2 viene preensamblado con el XIAO ESP32C6, pero es compatible con varios otros microcontroladores para comunicación e integración.
Si es la primera vez que utilizas Arduino con la serie XIAO, sigue la guía de configuración adecuada para tu placa:
- XIAO ESP32S3: Consulta la guía de inicio XIAO ESP32S3.
- XIAO ESP32C3: Sigue la guía Getting Started with Seeed Studio XIAO ESP32C3.
- XIAO ESP32C6: Sigue la guía Getting Started with Seeed Studio XIAO ESP32C6 .
Una vez que tu placa esté configurada, continúa con los siguientes pasos:
-
Descarga la biblioteca Seeed mmWave:
- Descarga la biblioteca Seeed mmWave desde GitHub.
- Instala la biblioteca en Arduino IDE:
- Abre Arduino IDE.
- Navega a Sketch > Include Library > Add .ZIP Library....
- Selecciona el archivo
.zipdescargado para instalar la biblioteca.
- Conecta tu placa XIAO:
- Conecta tu placa XIAO a tu ordenador mediante USB.
- En Arduino IDE, ve a Tools > Board y selecciona el modelo de tu placa XIAO.
- Elige el puerto correcto en Tools > Port.
- Carga un ejemplo de Sketch:
- Ve a File > Examples > Seeed Arduino mmWave.
- Selecciona el ejemplo correspondiente para Heartbeat Detection.
- Revisa el código y realiza los ajustes necesarios.
- Sube el Sketch:
- Haz clic en Upload para grabar el código en tu placa XIAO.
- Abre el Serial Monitor en Arduino IDE para ver los datos del sensor en tiempo real.
Uso
Esta sección proporciona fragmentos de código de ejemplo para ayudarte a empezar rápidamente a utilizar la biblioteca Seeed Arduino mmWave con varias funcionalidades, incluida la monitorización de la respiración, el control del LED RGB y la detección de luz.
Módulo de respiración
Este ejemplo demuestra cómo utilizar el sensor MR60BHA2 para monitorizar la respiración y los latidos cardíacos.
#include <Arduino.h>
#include "Seeed_Arduino_mmWave.h"
// Set up serial communication depending on the board type
#ifdef ESP32
# include <HardwareSerial.h>
HardwareSerial mmWaveSerial(0);
#else
# define mmWaveSerial Serial1
#endif
SEEED_MR60BHA2 mmWave;
void setup() {
Serial.begin(115200);
mmWave.begin(&mmWaveSerial);
}
void loop() {
if (mmWave.update(100)) {
float total_phase, breath_phase, heart_phase;
if (mmWave.getHeartBreathPhases(total_phase, breath_phase, heart_phase)) {
Serial.printf("total_phase: %.2f\t", total_phase);
Serial.printf("breath_phase: %.2f\t", breath_phase);
Serial.printf("heart_phase: %.2f\n", heart_phase);
}
float breath_rate;
if (mmWave.getBreathRate(breath_rate)) {
Serial.printf("breath_rate: %.2f\n", breath_rate);
}
float heart_rate;
if (mmWave.getHeartRate(heart_rate)) {
Serial.printf("heart_rate: %.2f\n", heart_rate);
}
float distance;
if (mmWave.getDistance(distance)) {
Serial.printf("distance: %.2f\n", distance);
}
}
}
La salida será la siguiente en el Monitor Serie de Arduino:
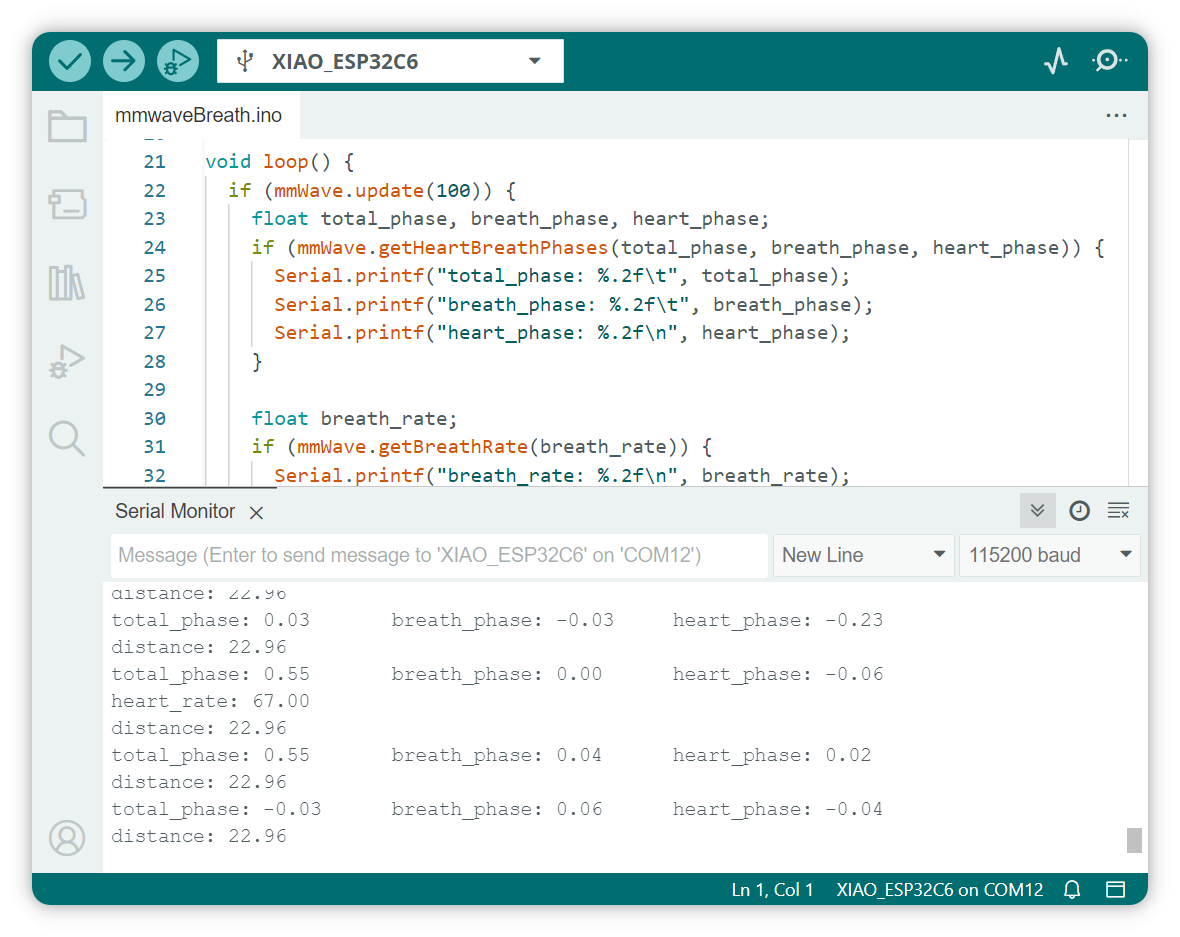
Si los datos devueltos no son 0, indican la existencia de un ser vivo dentro del rango de detección.
Detección de personas
Este ejemplo demuestra cómo usar el sensor MR60BHA2 para la detección de personas.
Asegúrate de haber upgrade the firmware del módulo MR60BHA2 a la última versión.
El firmware más reciente añade funciones de detección de presencia humana y relacionadas con objetos humanos.
#include <Arduino.h>
#include "Seeed_Arduino_mmWave.h"
// If the board is an ESP32, include the HardwareSerial library and create a
// HardwareSerial object for the mmWave serial communication
#ifdef ESP32
# include <HardwareSerial.h>
HardwareSerial mmWaveSerial(0);
#else
// Otherwise, define mmWaveSerial as Serial1
# define mmWaveSerial Serial1
#endif
SEEED_MR60BHA2 mmWave;
void setup() {
Serial.begin(115200);
mmWave.begin(&mmWaveSerial);
}
void loop() {
if (mmWave.update(100)) {
if (mmWave.isHumanDetected()) {
Serial.printf("-----Human Detected-----\n");
}
PeopleCounting target_info;
if (mmWave.getPeopleCountingTargetInfo(target_info)) {
Serial.printf("-----Got Target Info-----\n");
Serial.printf("Number of targets: %zu\n", target_info.targets.size());
for (size_t i = 0; i < target_info.targets.size(); i++) {
const auto& target = target_info.targets[i];
Serial.printf("Target %zu:\n", i + 1);
Serial.printf(" x_point: %.2f\n", target.x_point);
Serial.printf(" y_point: %.2f\n", target.y_point);
Serial.printf(" dop_index: %d\n", target.dop_index);
Serial.printf(" cluster_index: %d\n", target.cluster_index);
Serial.printf(" move_speed: %.2f cm/s\n", target.dop_index * RANGE_STEP);
}
}
// delay(500);
}
}
La salida será la siguiente en el Monitor Serie de Arduino:
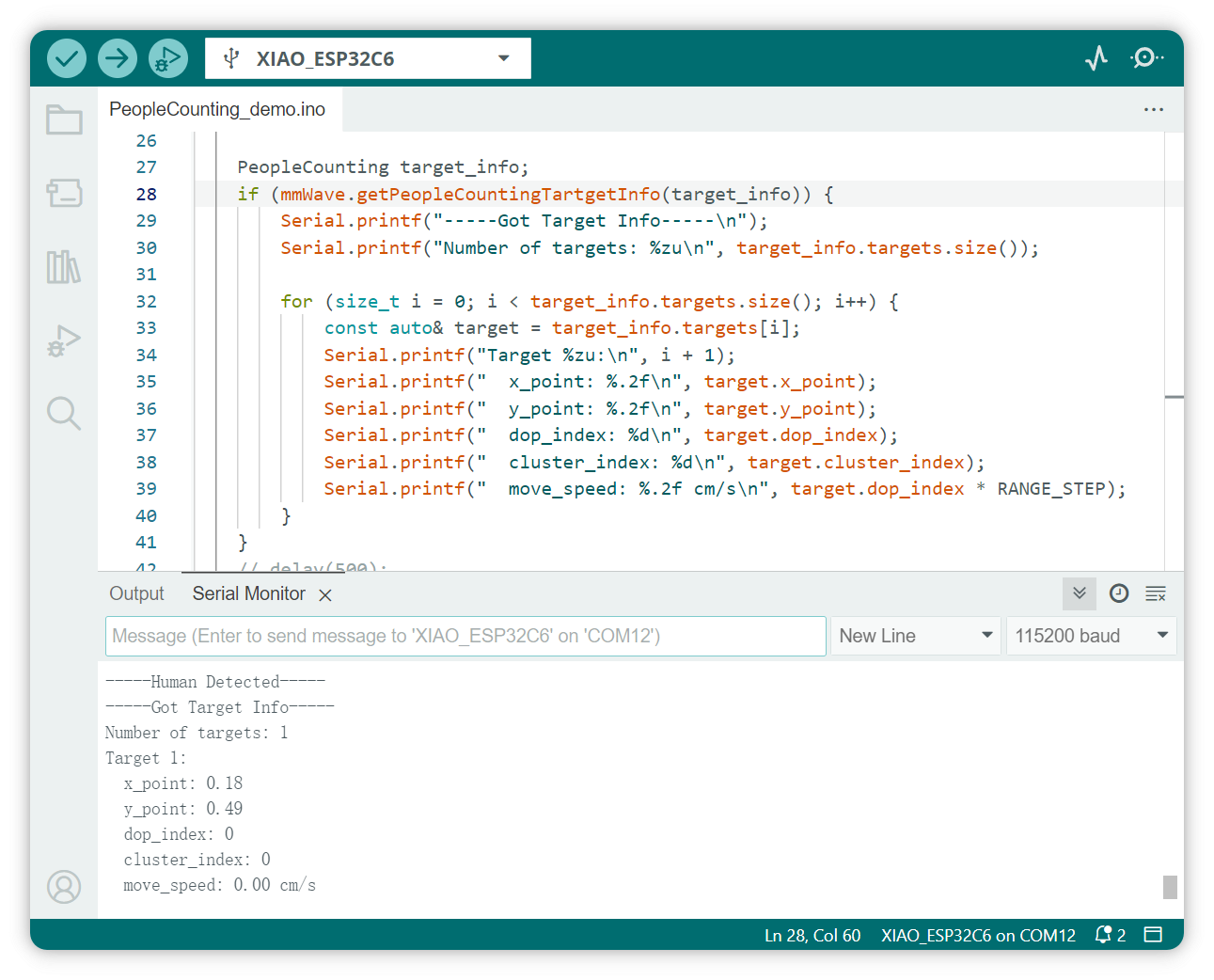
La respiración y la frecuencia cardíaca se pueden detectar dentro de 1,5 metros, y la presencia se puede detectar dentro de un rango de 1,5 a 6 metros.
Cuando haya personas dentro del rango de 1,5M, el módulo entrará en el modo de detección de latidos y respiración.
En este modo, la sensibilidad de la función de detección de personas puede disminuir.
Parpadear LED RGB
Este ejemplo demuestra cómo controlar un LED RGB usando la biblioteca NeoPixel.
- Step 1. Download the
Adafruit_NeoPixellibrary
Ve a Sketch > Include Liarbry > Manage Libraries..., y busca Adafruit_NeoPixel, instala la última versión.
- Step 2. Copy following code to a new sketch:
#include <Adafruit_NeoPixel.h>
#include <Arduino.h>
const int pixelPin = D1;
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(1, pixelPin, NEO_GRB + NEO_KHZ800);
void setup() {
Serial.begin(115200);
pixels.begin();
pixels.clear();
pixels.show();
}
void loop() {
for (int i = 0; i < 10; i++) {
pixels.setPixelColor(0, pixels.Color(255, 0, 0));
pixels.show();
delay(100);
pixels.setPixelColor(0, pixels.Color(0, 0, 0));
pixels.show();
delay(100);
}
for (int i = 255; i >= 0; i--) {
pixels.setPixelColor(0, pixels.Color(i, 0, 0));
pixels.show();
delay(10);
}
}
- Step 3. Select the correct board and port number to upload the program.
Una vez que el programa se haya subido correctamente, verás que el LED RGB en el lado derecho de los Módulos de Sensor mmWave está parpadeando.
Sensor de luz (BH1750)
Este ejemplo muestra cómo leer valores de intensidad de luz usando el sensor BH1750.
- Step 1. Download the
hp_BH1750library
Ve a Sketch > Include Liarbry > Manage Libraries..., y busca hp_BH1750, instala la última versión.
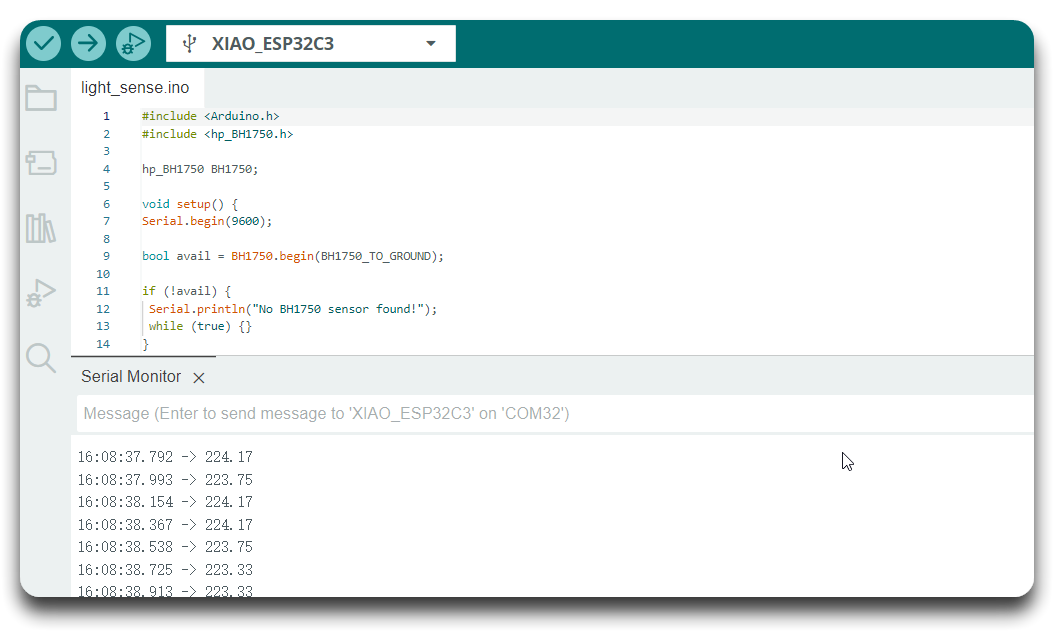
- Step 2. Copy following code to a new sketch:
#include <Arduino.h>
#include <hp_BH1750.h>
hp_BH1750 BH1750;
void setup() {
Serial.begin(9600);
bool avail = BH1750.begin(BH1750_TO_GROUND);
if (!avail) {
Serial.println("No BH1750 sensor found!");
while (true) {}
}
Serial.printf("conversion time: %dms\n", BH1750.getMtregTime());
BH1750.start();
}
void loop() {
if (BH1750.hasValue()) {
float lux = BH1750.getLux();
Serial.println(lux);
BH1750.start();
}
}
- Step 3. Select the correct board and port number to upload the program.
La salida será la siguiente en el Monitor Serie de Arduino:
API del Módulo de Respiración
Este ejemplo usa la clase SEEED_MR60BHA2 para interactuar con el sensor MR60BHA2 para la monitorización del corazón y la respiración. Aquí se explica qué hace cada función clave:
-
mmWave.begin(&mmWaveSerial):- Inicializa el sensor para la comunicación usando la interfaz serie especificada. Configura la conexión entre la placa XIAO y el sensor MR60BHA2.
-
mmWave.update(100):- Actualiza los datos del sensor. El parámetro
100es un valor de tiempo de espera en milisegundos, que especifica cuánto tiempo esperar a que el sensor proporcione nuevos datos. Si hay nuevos datos disponibles dentro de este intervalo, la función devuelvetrue.
- Actualiza los datos del sensor. El parámetro
-
mmWave.getHeartBreathPhases(float &total_phase, float &breath_phase, float &heart_phase):- Obtiene la información de fase relacionada con las actividades del corazón y la respiración.
total_phaserepresenta el desplazamiento de fase total, mientras quebreath_phaseyheart_phaseson específicas de las actividades de respiración y latido del corazón, respectivamente.
-
mmWave.getBreathRate(float &rate):- Obtiene la frecuencia respiratoria actual detectada por el sensor. La frecuencia se devuelve en la variable de referencia
rate.
- Obtiene la frecuencia respiratoria actual detectada por el sensor. La frecuencia se devuelve en la variable de referencia
-
mmWave.getHeartRate(float &rate):- Obtiene la frecuencia cardíaca actual detectada por el sensor. La frecuencia se devuelve en la variable de referencia
rate.
- Obtiene la frecuencia cardíaca actual detectada por el sensor. La frecuencia se devuelve en la variable de referencia
-
mmWave.getDistance(float &distance):- Obtiene la distancia desde el sensor hasta el objeto detectado (por ejemplo, el cuerpo humano). Esta función es útil para comprender el alcance de la señal detectada.
-
mmWave.getPeopleCountingPointCloud(PeopleCounting& point_cloud):- Obtiene información sobre nubes de puntos. Solo implementa la recepción del tipo de mensaje; es normal que no haya datos.
- La estructura
PeopleCountingcontiene un vector de objetivos detectados. Cada objetivo incluye los siguientes atributos:x_point: Coordenada X del objetivo (en metros).y_point: Coordenada Y del objetivo (en metros).dop_index: Índice Doppler, que representa la velocidad del objetivo.- La velocidad real de movimiento (en cm/s) se puede calcular como:
dop_index * RANGE_STEP, dondeRANGE_STEPes la resolución de velocidad.
- La velocidad real de movimiento (en cm/s) se puede calcular como:
cluster_index: ID de clúster del objetivo, usado para identificar objetivos individuales en la escena.
-
mmWave.getPeopleCountingTartgetInfo(PeopleCounting& target_info):- Obtiene información sobre los objetivos detectados.
- La estructura
PeopleCountingcontiene un vector de objetivos detectados. Cada objetivo incluye los siguientes atributos:x_point: Coordenada X del objetivo (en metros).y_point: Coordenada Y del objetivo (en metros).dop_index: Índice Doppler, que representa la velocidad del objetivo.- La velocidad real de movimiento (en cm/s) se puede calcular como:
dop_index * RANGE_STEP, dondeRANGE_STEPes la resolución de velocidad.
- La velocidad real de movimiento (en cm/s) se puede calcular como:
cluster_index: ID de clúster del objetivo, usado para identificar objetivos individuales en la escena.
-
mmWave.isHumanDetected():- Devuelve si se ha detectado una persona.
Actualización del firmware del módulo
Modificar el firmware del radar es una operación arriesgada, así que asegúrate de leer esta sección detenidamente antes de seguir cada paso con cuidado. Ten en cuenta que, si un paso no se realiza correctamente, el radar puede quedar inutilizado o inservible.
Nota especial, si compraste el Fall Radar MR60FDA2, por favor no flashees el firmware de forma no autorizada mediante el siguiente método, ¡¡¡¡seguro que dejarás tu dispositivo inservible!!!!
Si prefieres no leer el texto, también puedes consultar el vídeo para actualizar el firmware. Dado que el firmware ESPHome para XIAO se sobrescribirá a continuación, es posible que necesites volver a flashear el firmware ESPHome para XIAO en esta página web después de actualizar el firmware del radar.
Primero, conecta juntos los módulos XIAO ESP32C6 y MR60BHA2. Luego utiliza el siguiente código para programar XIAO.
#include <Arduino.h>
#include "Seeed_Arduino_mmWave.h"
// If the board is an ESP32, include the HardwareSerial library and create a
// HardwareSerial object for the mmWave serial communication
#ifdef ESP32
# include <HardwareSerial.h>
HardwareSerial mmWaveSerial(0);
#else
// Otherwise, define mmWaveSerial as Serial1
# define mmWaveSerial Serial1
#endif
void setup() {
// Initialize the serial communication for debugging
Serial.begin(115200);
while (!Serial) {
; // Wait for Serial to initialize
}
// Initialize the mmWaveSerial communication
mmWaveSerial.begin(115200);
}
void loop() {
// Check if there is data available from mmWaveSerial
while (mmWaveSerial.available() > 0) {
char receivedChar = mmWaveSerial.read();
Serial.write(receivedChar); // Forward data to Serial
}
// Check if there is data available from Serial
while (Serial.available() > 0) {
char receivedChar = Serial.read();
mmWaveSerial.write(receivedChar); // Forward data to mmWaveSerial
}
}
La función del código anterior es transmitir de forma transparente el puerto serie del módulo al puerto serie USB de XIAO, para así actualizar el firmware del módulo a través de XIAO.
Por favor conecta XIAO a tu PC durante el proceso de actualización.
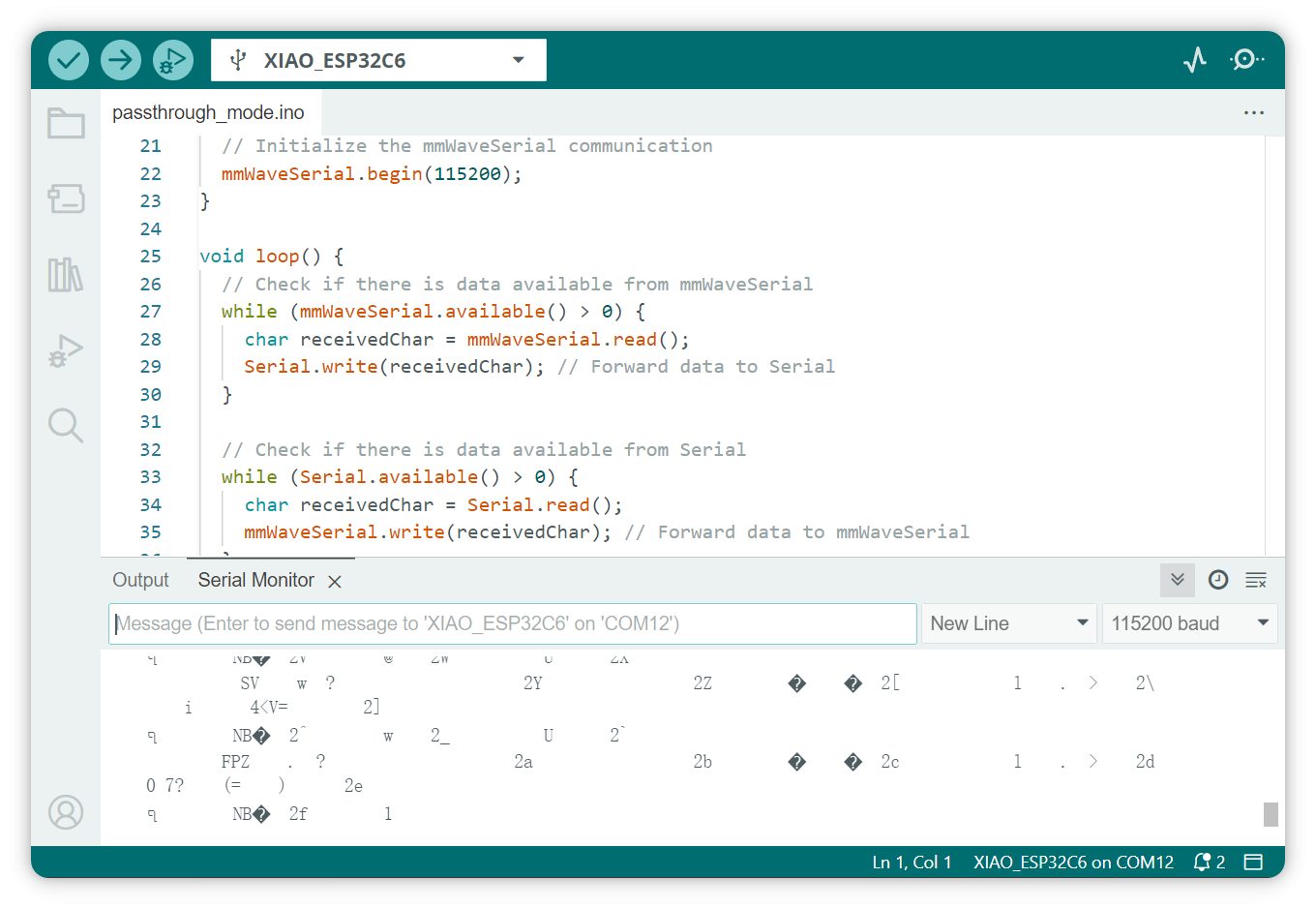
Verás los datos originales enviados por el módulo.
Luego necesitas descargar y descomprimir aquí la herramienta OTA y el firmware.
El firmware 1.6.12 tiene la siguiente actualización:
-
Se solucionó la pérdida de objetivo cuando estaba estacionario dentro de 1,5 metros.
-
Se optimizó la estabilidad de seguimiento para objetivos que se mueven entre 0 y 3 metros, resolviendo inexactitudes previas en las coordenadas del objetivo. Sin embargo, la frecuencia de actualización de los reportes ha disminuido.
-
Precisión de respiración y frecuencia cardíaca—No hay actualizaciones en esta versión. Se continúa con la optimización del entrenamiento de aprendizaje automático relacionado. Se publicará una actualización de firmware para mejorar la precisión de respiración y frecuencia cardíaca hacia finales de mes. El algoritmo anterior de respiración y frecuencia cardíaca tenía problemas fundamentales que ya se han solucionado.
- Herramienta de actualización de firmware MR60BHA2: MR60BHA2_OTA.zip
- Firmware MR60BHA2 v1.6.12: MR60BHA2_eeprom_1.6.12.bin
Haz clic aquí para previsualizar la versión antigua
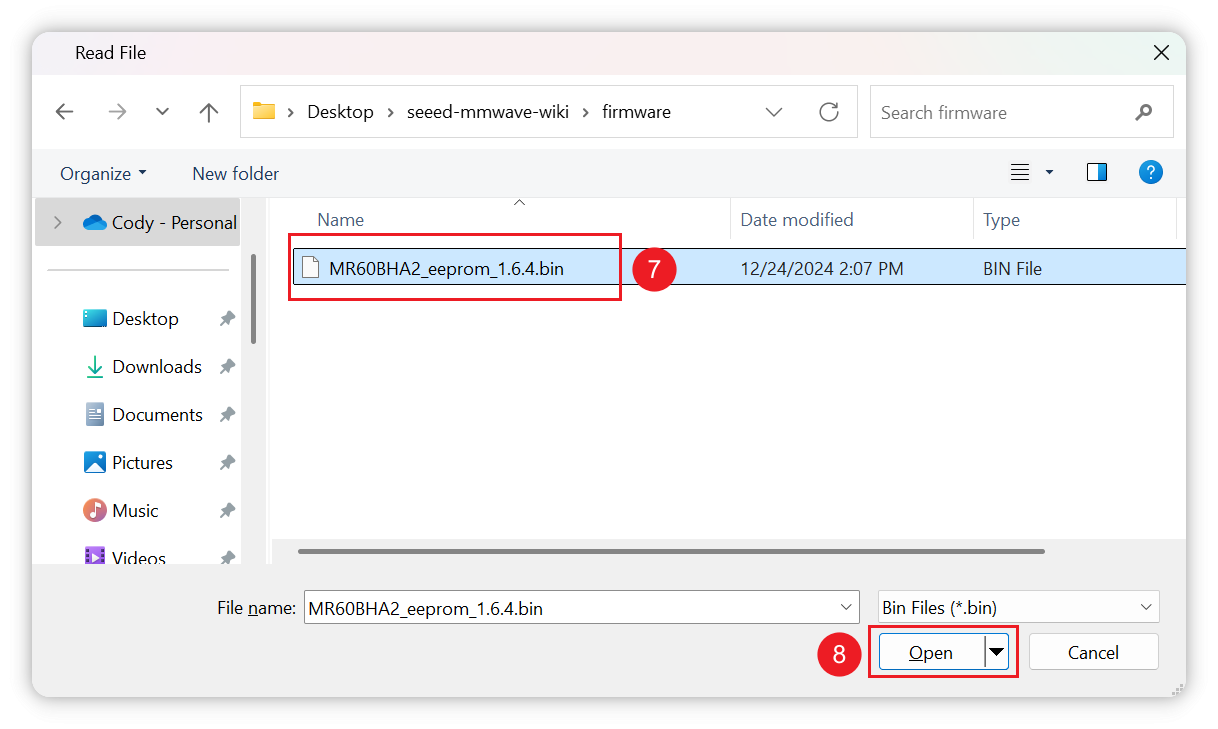
- Firmware MR60BHA2 v1.6.4: MR60BHA2_eeprom_1.6.4.bin
El firmware 1.6.4 tiene la siguiente actualización:
- Se optimizó la función de detección de respiración y frecuencia cardíaca, corrigiendo el error por el cual pequeños movimientos corporales provocaban pérdida de datos.
- Se mejoró la función de detección de presencia 3D: la respiración y la frecuencia cardíaca pueden detectarse dentro de 1,5 metros, y la presencia puede detectarse en un rango de 1,5 a 6 metros.
- Se añadió una función de detección de personal, capaz de detectar hasta tres personas dentro de un rango de 6 metros.
- Firmware MR60BHA2 v1.6.5: MR60BHA2_eeprom_1.6.5.bin
El firmware 1.6.5 tiene la siguiente actualización:
- Se solucionó el problema de que a veces no se detectaban la respiración y la frecuencia cardíaca cuando el cuerpo humano estaba en reposo.
- Firmware MR60BHA2 v1.6.10: MR60BHA2_eeprom_1.6.10.bin
El firmware 1.6.10 tiene la siguiente actualización:
- Se optimizó la mecánica de respiración para resolver el problema de que la duración de la apnea no disminuía.
- Se añadió la funcionalidad de recopilación de datos.
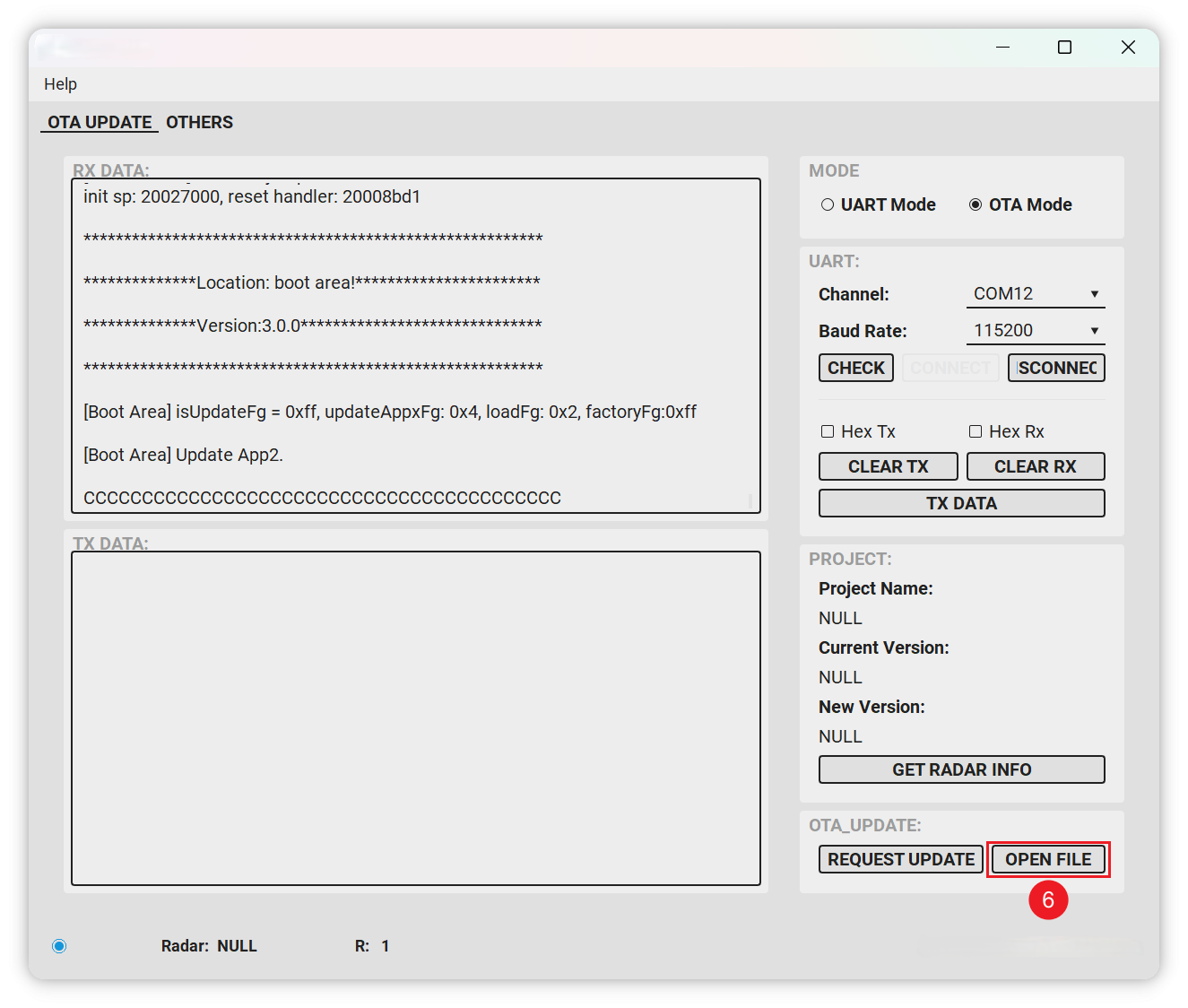
- Comprueba y conéctate al puerto serie (configura la velocidad en baudios a 115200)
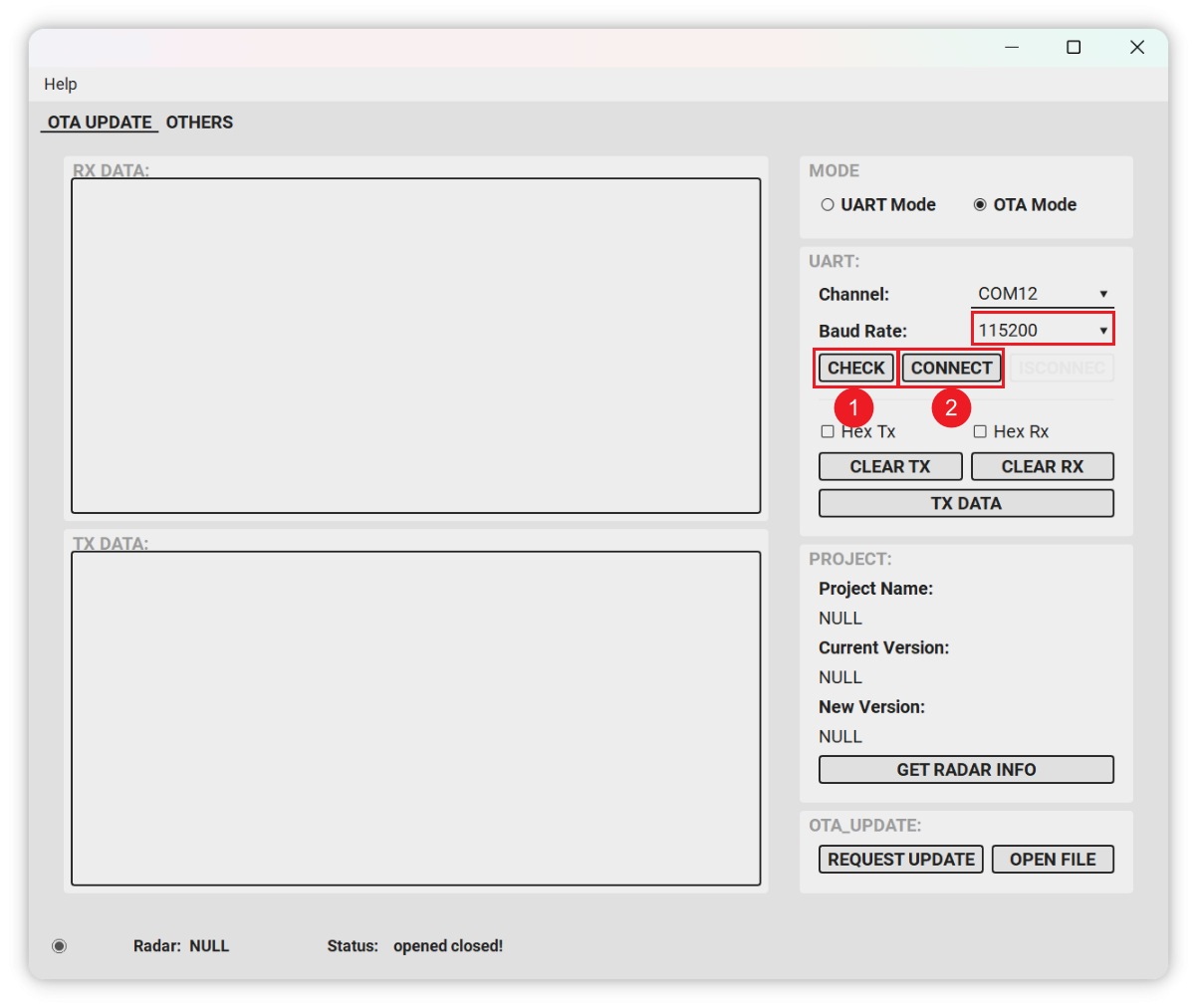
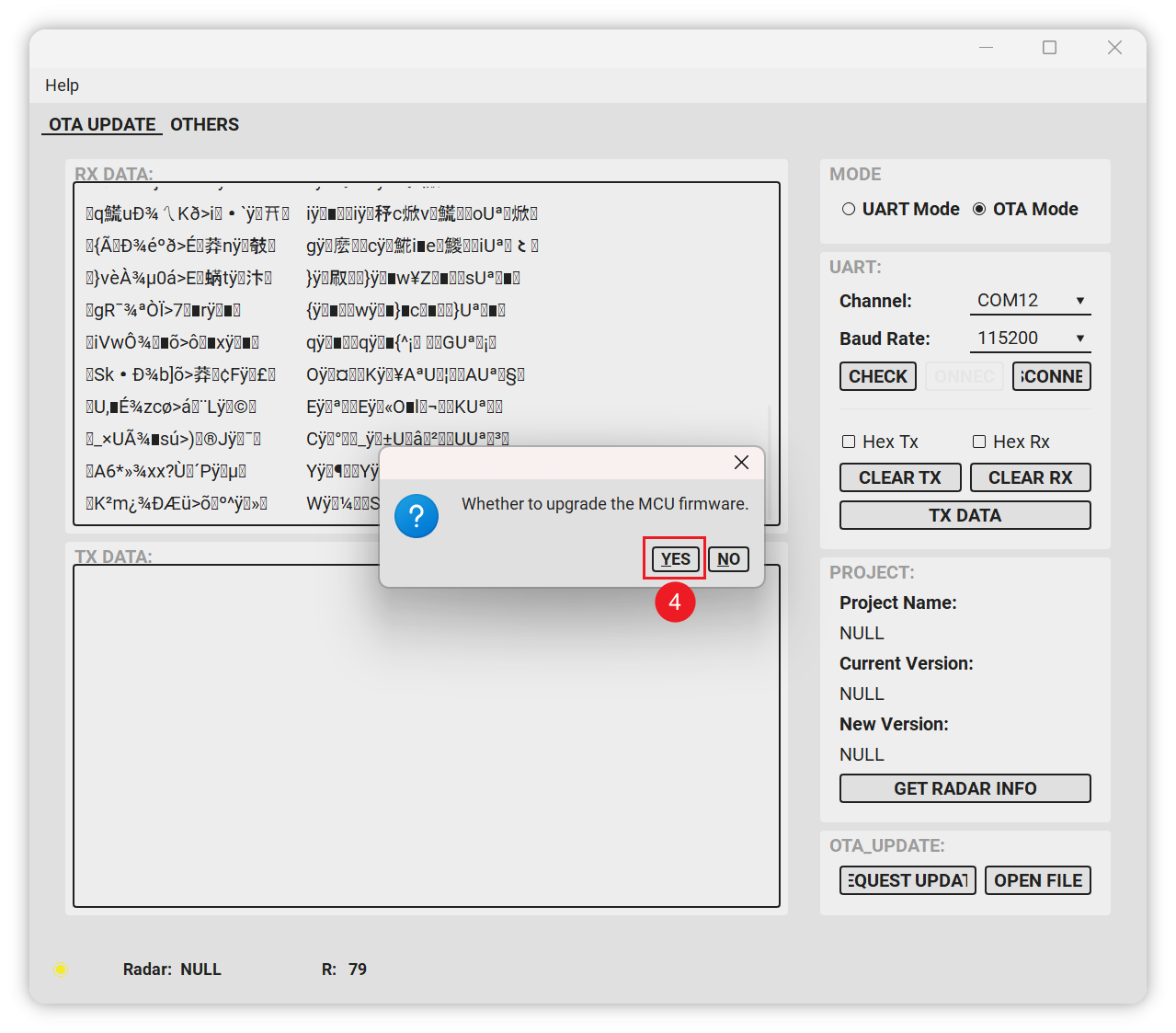
- Haz clic en "REQUEST UPDATE" para entrar en el modo de actualización:
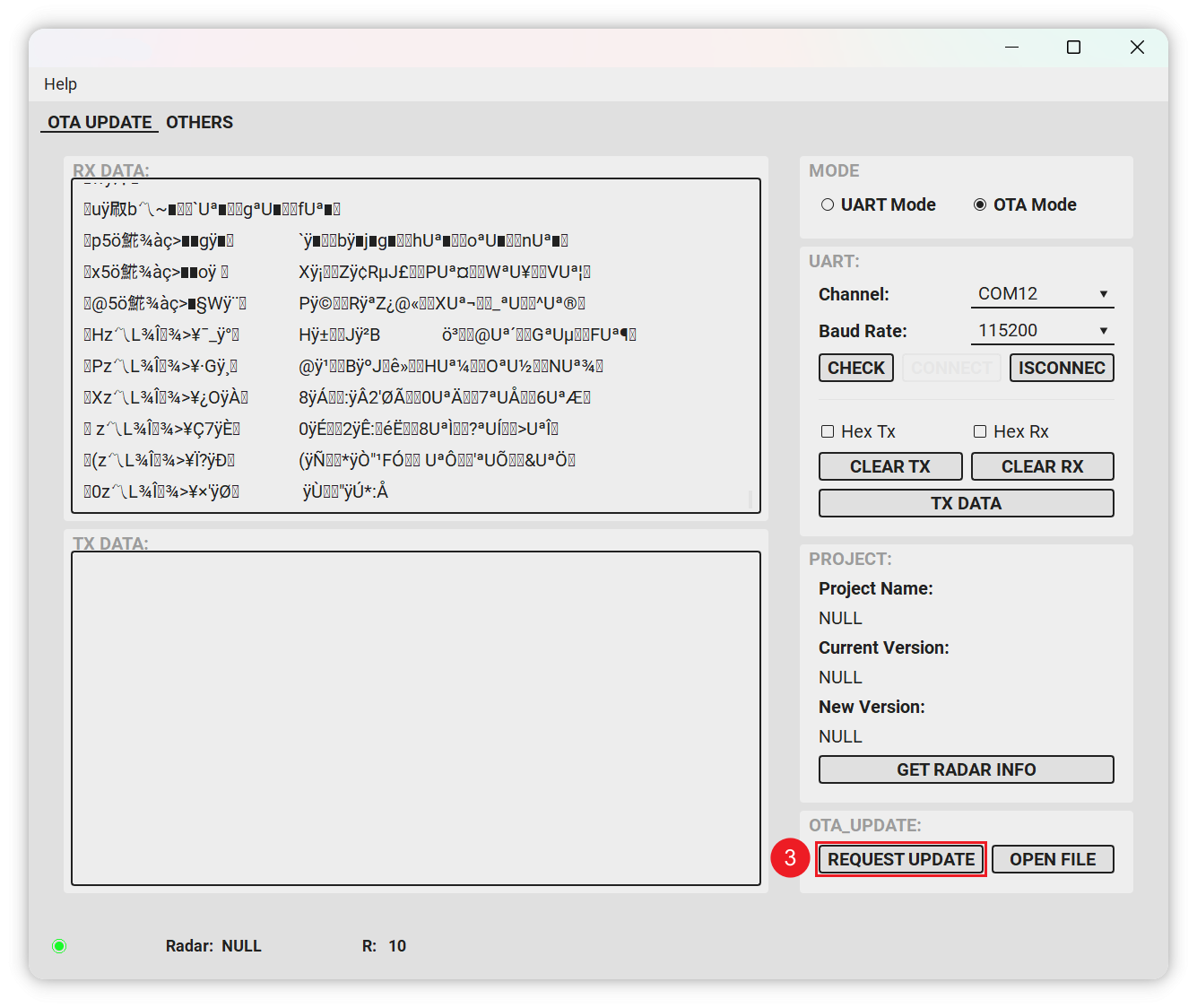
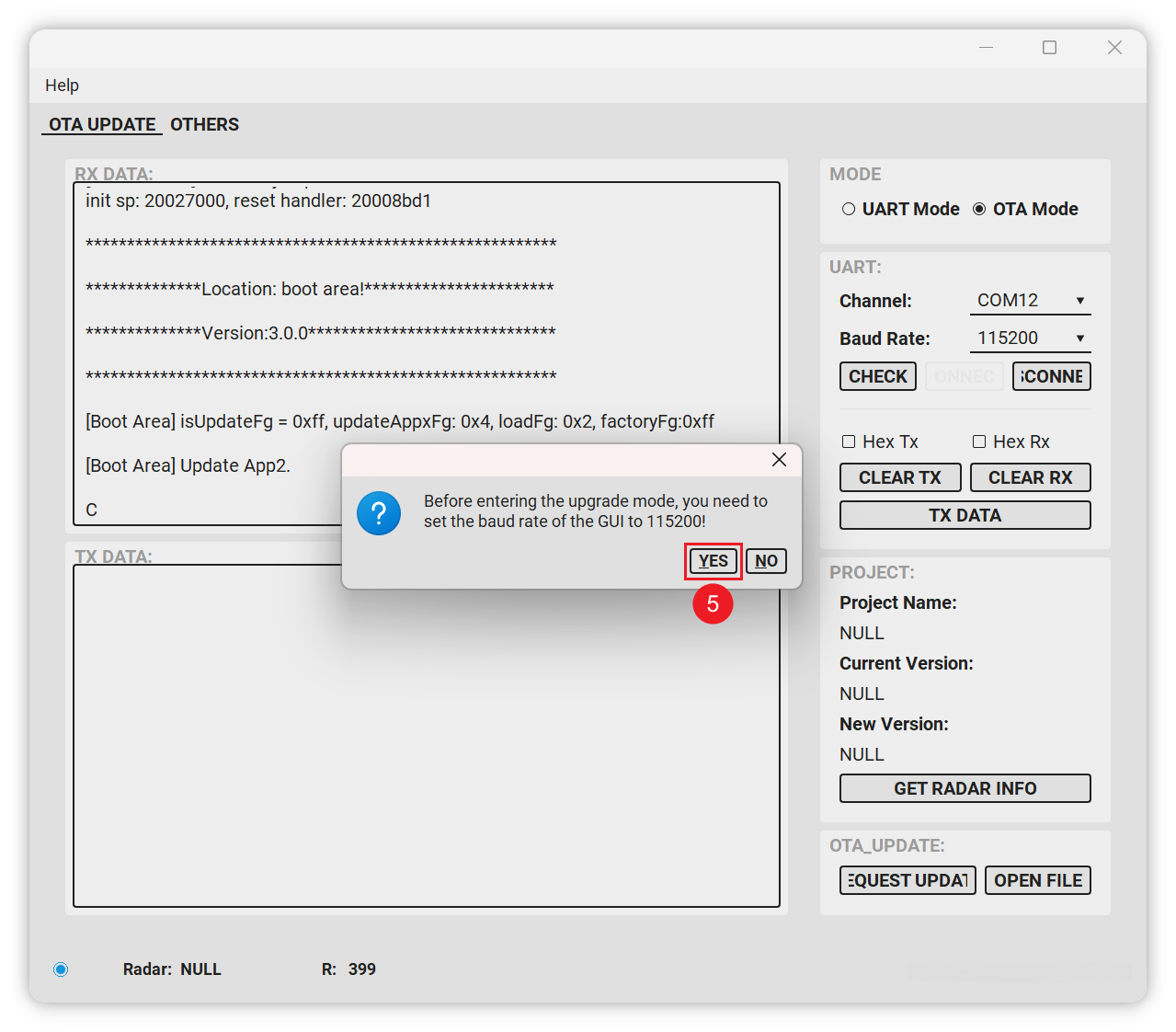
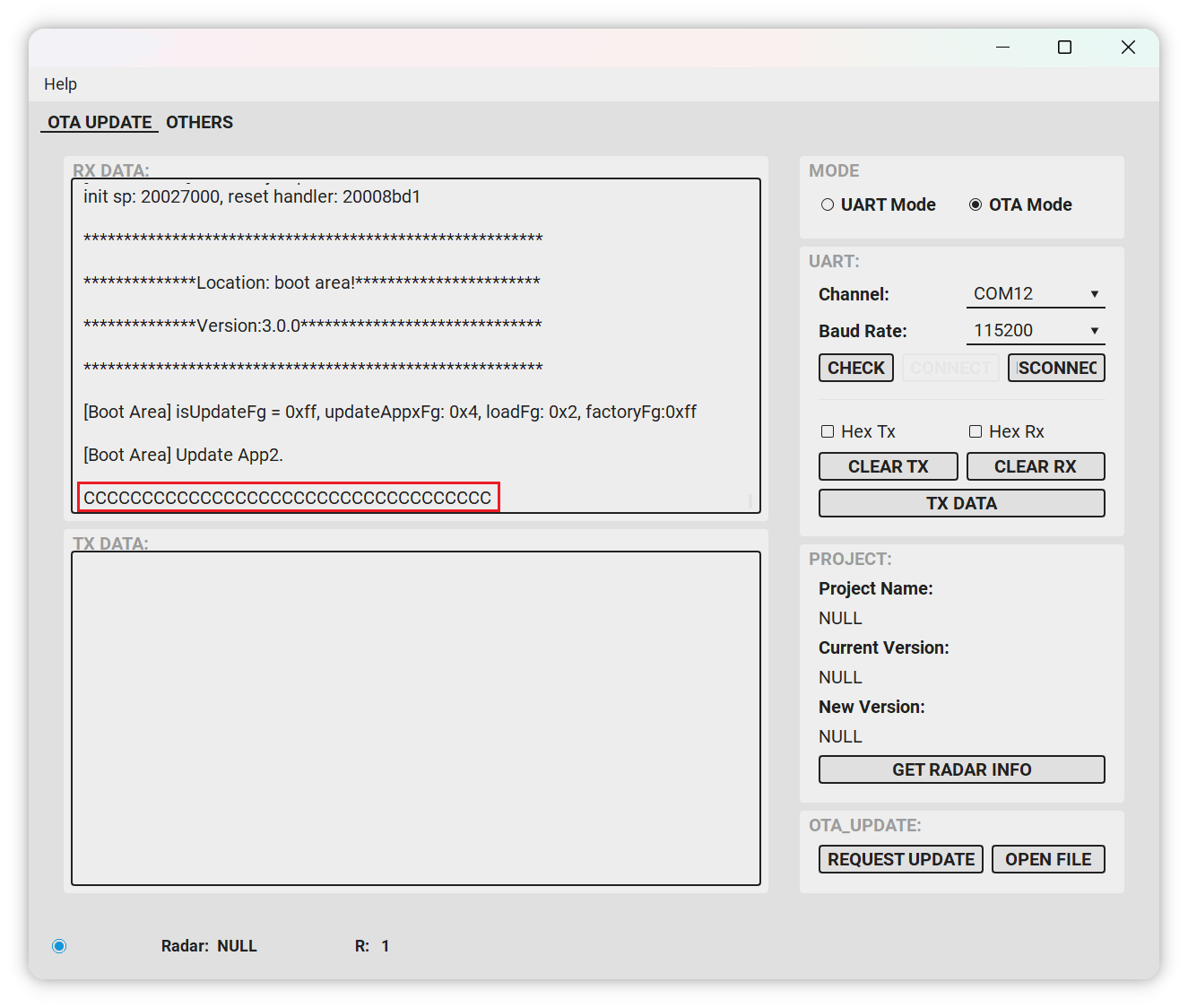
- Si se imprime "C" o "43", significa que el módulo ha entrado en modo de actualización.
- Selecciona el firmware que se va a actualizar. Después de la selección, entrará automáticamente en el estado de actualización.
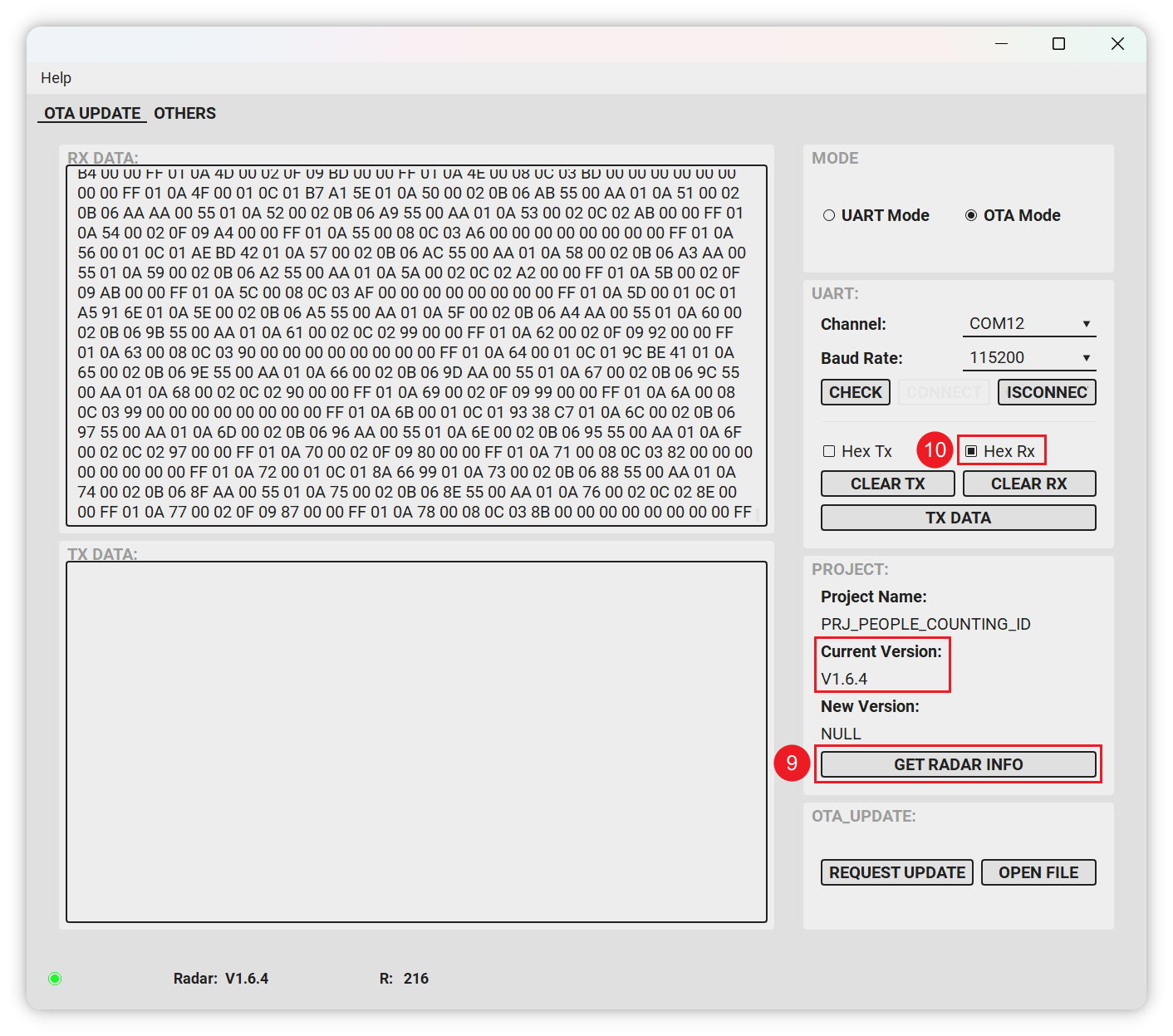
Una vez completada la actualización, saltará automáticamente al modo normal. Si no cambia, apaga y reinicia, y luego utiliza la herramienta OTA para ver los datos del puerto serie.
- Después de que la actualización se complete, puedes usar la herramienta OTA para leer la versión y los datos en bruto.
- Necesitas volver a flashear el firmware de XIAO ESP32C6 después de que la actualización se haya completado.
Si en los pasos anteriores has operado incorrectamente provocando que se produzca una anomalía y no has podido intentar grabar el firmware de nuevo y el radar no funciona correctamente, entonces es posible que el radar haya quedado inservible debido a un firmware dañado. La única forma de intentar recuperar el dispositivo es consultar los archivos y la documentación aquí. Sin embargo, por favor entiende que no proporcionamos soporte técnico ni asistencia para dispositivos que hayan quedado inservibles debido a una operación incorrecta.
Abierto a personalización
¿Quieres adaptar el kit para que se ajuste a tus aplicaciones únicas?
Para obtener más información sobre la generación de datos de nubes de puntos 3D y la configuración de zonas de interferencia al personalizar módulos mmWave, Seeed ofrece servicios integrales de I+D, personalización y fabricación para un desarrollo rápido desde el concepto hasta la producción. Contáctanos en [email protected] para obtener más información.
El firmware y los algoritmos del radar no son de código abierto, y los parámetros complejos del radar, como la nube de puntos 3D, la distancia de detección, el alcance, etc., requieren servicios personalizados, que pueden implicar tarifas de personalización adicionales y MOQs.
Recursos
- STL: Carcasa 3D mmWave
- Repositorio de GitHub: Accede a toda la base de código y documentación en la página de GitHub de Seeed mmWave Library.
- Documentación de ESPHome: Para más personalización e integración, consulta la documentación de ESPHome.
- Herramienta de actualización de firmware MR60BHA2: MR60BHA2_OTA.zip
- Firmware MR60BHA2 v1.6.12: MR60BHA2_eeprom_1.6.12.bin
- Software GUI MR60BHA2: Seeed_Studio_mmWave_Sensor_MR60BHA2_GUI.zip
- mmWave Sensor SCH V1.0: mmWave_Sensor_SCH_V1.0.pdf
- Especificación técnica del módulo MR60BHA2: MR60BHA2_Breathing_and_Heartbeat_Module.pdf
- Manual de interfaz Tiny Frame MR60BHA2: Seeed_Studio_Tiny_Frame_Interface_Breathing_and_Heartbeat.pdf
- Método de recuperación de firmware de radar mediante Jlink: Radar_Firmware_Recovery_Method-Jlink.zip
Soporte técnico y debate sobre el producto
Gracias por elegir nuestros productos. Estamos aquí para ofrecerle diferentes tipos de soporte y garantizar que su experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para adaptarnos a diferentes preferencias y necesidades.