Primeros pasos con el Kit de Sensor de Detección de Caídas mmWave de 60GHz con XIAO ESP32C6 (MR60FDA2)

Presentamos nuestros avanzados Módulos de Sensor mmWave para XIAO, diseñados para proporcionar soluciones de monitoreo de vanguardia tanto para detección de caídas como para monitoreo de latidos del corazón. Alimentados por el robusto microcontrolador XIAO ESP32 con conectividad Wi-Fi y Bluetooth integrada, estos módulos ofrecen capacidades de detección precisas y confiables. Ya sea que necesites monitorear caídas en tiempo real o rastrear latidos del corazón con precisión sensible, nuestros módulos están equipados con tecnología de última generación, incluyendo LEDs RGB personalizables y detección de luz ambiente. Con opciones de expansión fáciles a través de puertos Grove GPIO, estos módulos versátiles son perfectos para una amplia gama de aplicaciones, desde integración de hogar inteligente hasta monitoreo de salud.
Características
- Habilitado para Wi-Fi y Bluetooth: Ambos módulos están alimentados por XIAO ESP32 con firmware ESPHome pre-cargado, asegurando configuración rápida y personalización.
- Módulo de Detección de Caídas:
- Detección Precisa de Caídas: Cubre un área de 3x3x3 metros con un ángulo de detección de 100° x 40°.
- Detección de Presencia Estática: Monitorea individuos estacionarios hasta 6 metros de distancia.
- Detección Ambiental:
- Sensor de Luz BH1750: Mide la luz ambiente de 1 a 65,535 lux.
- LED RGB WS2812: LED personalizable para retroalimentación visual y proyectos DIY.
- Conectividad Expandible: Incluye puertos Grove GPIO para agregar sensores y módulos adicionales.
Especificaciones
| Parámetros Generales | |
|---|---|
| Firmware mmWave | Monitoreo de Detección de Caídas |
| Rango de Detección | Detección de Presencia Estática Humana: hasta 6 Metros Detección de Caídas: - Rango de 3x3x3 metros - Campo de Visión Horizontal (FoV) de 120° - FoV Vertical de 100° |
| MCU | Seeed Studio XIAO ESP32C6 |
| LED | LED RGB WS2812 |
| Botón | Reinicio |
| Sensor de Luz | BH1750 Rango: 1 a 65,535 lux con mediciones ajustables hasta 100,000 lux |
| Conectividad | 1 Puerto GPIO (D0, D10) |
| Espaciado de Pines | 2.54mm |
| Fuente de Alimentación | Entrada 5V/1A |
| Consumo de energía | 0.5w: Modo de Espera 0.8w: Modo de Activación 1.4w: trabajando con estado de Relé Grove |
Aplicación
- Sistemas de Seguridad
- Monitoreo de Salud
- Automatización del Hogar Inteligente
- Cuidado de Ancianos
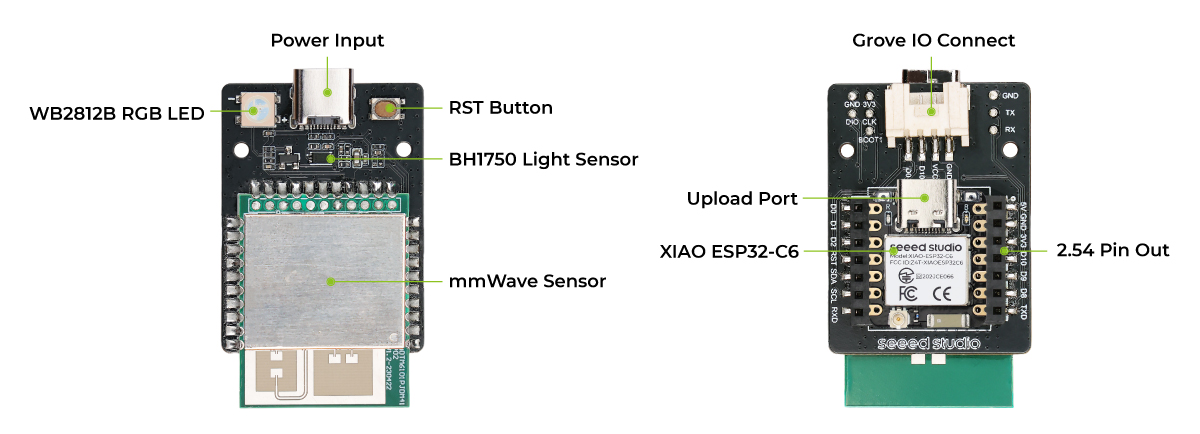
Descripción General del Hardware
Primeros Pasos
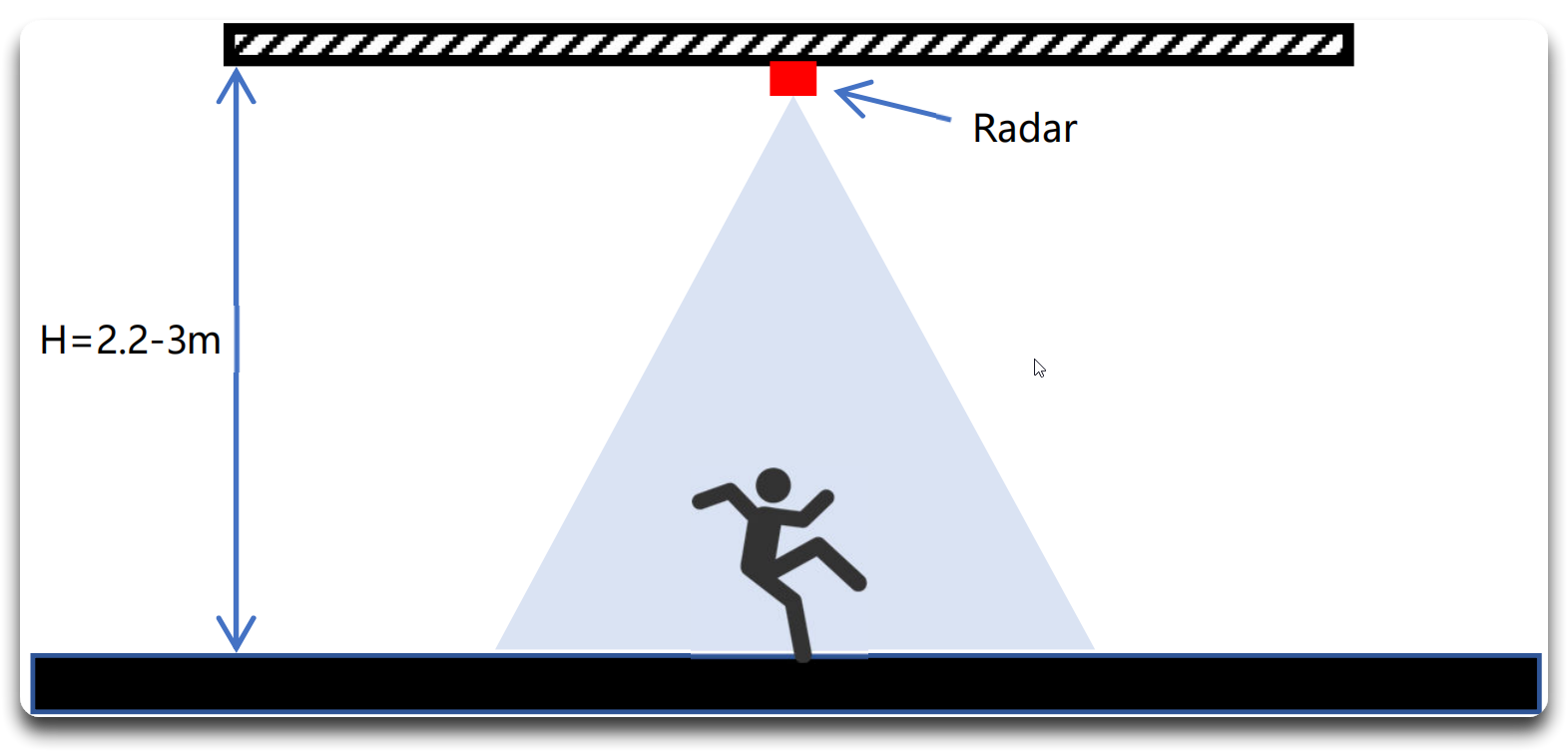
Método de instalación y rango de detección
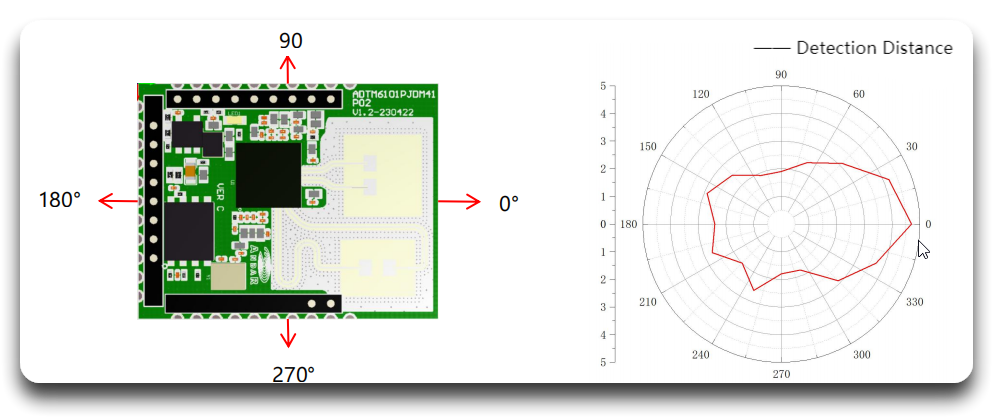
Montaje superior con altura de suspensión de 2.2-3.0m, radio máximo de detección de 2m, el lado con el sensor mmWave debe alinearse con la dirección de detección.
Por favor use este módulo en un espacio abierto, y manténgase fuera de los siguientes escenarios dentro del rango de detección para prevenir interferencias con el módulo:
- Múltiples radares instalados muy cerca entre sí
- El viento mueve cortinas y balancea plantas
- Flujo de agua y película de agua
- Grandes áreas de reflexiones metálicas y de espejos
- Detección a través de vidrio y tableros de madera delgados
- Ubicación de instalación propensa a vibraciones
- Uso de fuentes de alimentación de baja calidad
Preparación del Software (Arduino)
Por defecto, el MR60BHA2 viene preensamblado con el XIAO ESP32C6, pero es compatible con varios otros microcontroladores para comunicación e integración.
Si esta es su primera vez usando Arduino con la serie XIAO, siga la guía de configuración apropiada para su placa:
- XIAO ESP32S3: Consulte la Guía de Primeros Pasos del XIAO ESP32S3.
- XIAO ESP32C3: Siga la guía Primeros Pasos con Seeed Studio XIAO ESP32C3.
- XIAO ESP32C6: Siga la guía Primeros Pasos con Seeed Studio XIAO ESP32C6.
Una vez que su placa esté configurada, proceda con los siguientes pasos:
- Descargar la Librería Seeed mmWave:
- Descargue la librería Seeed mmWave desde GitHub.
- Instalar la Librería en Arduino IDE:
- Abra el Arduino IDE.
- Navegue a Sketch > Incluir Librería > Añadir librería .ZIP....
- Seleccione el archivo
.zipdescargado para instalar la librería.
- Conectar su Placa XIAO:
- Conecte su placa XIAO a su computadora vía USB.
- En el Arduino IDE, vaya a Herramientas > Placa y seleccione su modelo de placa XIAO.
- Elija el puerto correcto bajo Herramientas > Puerto.
- Cargar un Sketch de Ejemplo:
- Vaya a Archivo > Ejemplos > Seeed Arduino mmWave.
- Seleccione el ejemplo relevante para Detección de Caídas.
- Revise el código y haga los ajustes necesarios.
- Subir el Sketch:
- Haga clic en Subir para cargar el código a su placa XIAO.
- Abra el Monitor Serie en el Arduino IDE para ver los datos del sensor en tiempo real.
Uso
Esta sección proporciona fragmentos de código de ejemplo para ayudarle a comenzar rápidamente a usar la Librería Seeed Arduino mmWave con varias funcionalidades, incluyendo detección de caídas, control de LED RGB y detección de luz.
Fall Module
Este ejemplo muestra cómo usar el sensor MR60FDA2 para la detección de caídas.
#include <Adafruit_NeoPixel.h>
#include <Arduino.h>
#include <hp_BH1750.h> //inlude the library
#include "Seeed_Arduino_mmWave.h"
#ifdef ESP32
# include <HardwareSerial.h>
HardwareSerial mmwaveSerial(0);
#else
# define mmwaveSerial Serial1
#endif
#define LIGHT_GPIO D0
/****** instance ******/
hp_BH1750 BH1750; // create the sensor object
SEEED_MR60FDA2 mmWave;
Adafruit_NeoPixel pixels =
Adafruit_NeoPixel(1, /* pixelPin */ D1, NEO_GRB + NEO_KHZ800);
/****** funtions ******/
void relay_init();
void relay_on();
void relay_off();
/****** variables ******/
uint32_t sensitivity = 15;
float height = 2.8, threshold = 1.0;
float rect_XL, rect_XR, rect_ZF, rect_ZB;
const uint8_t dark_lux = 10;
void setup() {
bool result;
Serial.begin(115200);
mmWave.begin(&mmwaveSerial);
/* init relay device*/
relay_init();
/* init RGB LED */
pixels.begin();
pixels.clear();
pixels.setBrightness(8);
pixels.show();
pixels.setPixelColor(0, pixels.Color(125, 125, 125));
/* init built-in light ambient light sensor */
BH1750.begin(BH1750_TO_GROUND); // will be false no sensor found
// | already connected to I2C
BH1750.calibrateTiming();
BH1750.start(BH1750_QUALITY_HIGH2,
254); // start the first measurement in setup
/* set mmwave-fall parameters */
mmWave.setUserLog(0);
/** set the height of the installation **/
if (mmWave.setInstallationHeight(height)) {
Serial.printf("setInstallationHeight success: %.2f\n", height);
} else {
Serial.println("setInstallationHeight failed");
}
/** Set threshold **/
if (mmWave.setThreshold(threshold)) {
Serial.printf("setThreshold success: %.2f\n", threshold);
} else {
Serial.println("setThreshold failed");
}
/** Set sensitivity **/
if (mmWave.setSensitivity(sensitivity)) {
Serial.printf("setSensitivity success %d\n", sensitivity);
} else {
Serial.println("setSensitivity failed");
}
/** get new parameters of mmwave **/
if (mmWave.getRadarParameters(height, threshold, sensitivity, rect_XL,
rect_XR, rect_ZF, rect_ZB)) {
Serial.printf("height: %.2f\tthreshold: %.2f\tsensitivity: %d\n", height,
threshold, sensitivity);
Serial.printf(
"rect_XL: %.2f\trect_XR: %.2f\trect_ZF: %.2f\trect_ZB: %.2f\n", rect_XL,
rect_XR, rect_ZF, rect_ZB);
} else {
Serial.println("getRadarParameters failed");
}
}
typedef enum {
EXIST_PEOPLE,
NO_PEOPLE,
PEOPLE_FALL,
} MMWAVE_STATUS;
MMWAVE_STATUS status = NO_PEOPLE, last_status = NO_PEOPLE;
float lux = 100;
void loop() {
/* get status */
if (mmWave.update(100)) {
bool is_human, is_fall;
// Get the human detection status
if (mmWave.getHuman(is_human)) {
// Get the fall detection status
if (mmWave.getFall(is_fall)) {
// Determine the status based on human and fall detection
if (!is_human && !is_fall) {
status = NO_PEOPLE; // No human and no fall detected
} else if (is_fall) {
status = PEOPLE_FALL; // Fall detected
} else {
status = EXIST_PEOPLE; // Human detected without fall
}
}
}
// Get the human detection status
if (!mmWave.getHuman(is_human) && !mmWave.getFall(is_fall)) {
status = NO_PEOPLE; // No human and no fall detected
} else if (is_fall) {
status = PEOPLE_FALL; // Fall detected
} else {
status = EXIST_PEOPLE; // Human detected without fall
}
}
switch (status) {
case NO_PEOPLE:
Serial.printf("Waiting for people");
break;
case EXIST_PEOPLE:
Serial.printf("PEOPLE !!!");
break;
case PEOPLE_FALL:
Serial.printf("FALL !!!");
break;
default:
break;
}
Serial.print("\n");
/* change interactive Light*/
if (status != last_status) { // switching LED
switch (status) {
case NO_PEOPLE:
pixels.setPixelColor(0, pixels.Color(0, 0, 255)); // BLUE
break;
case EXIST_PEOPLE:
pixels.setPixelColor(0, pixels.Color(0, 255, 0)); // GREEN
break;
case PEOPLE_FALL:
pixels.setPixelColor(0, pixels.Color(255, 0, 0)); // RED
break;
default:
break;
}
pixels.show();
last_status = status;
}
/* update lux value */
if (BH1750.hasValue() == true) {
lux = BH1750.getLux();
BH1750.start(BH1750_QUALITY_HIGH2, 254);
}
Serial.print("LUX: ");
Serial.print(lux);
Serial.print("\t");
if ((status == EXIST_PEOPLE || status == PEOPLE_FALL) && lux < dark_lux) {
relay_on();
} else {
relay_off();
}
}
void relay_init() {
pinMode(LIGHT_GPIO, OUTPUT);
}
void relay_on() {
digitalWrite(LIGHT_GPIO, HIGH);
}
void relay_off() {
digitalWrite(LIGHT_GPIO, LOW);
}
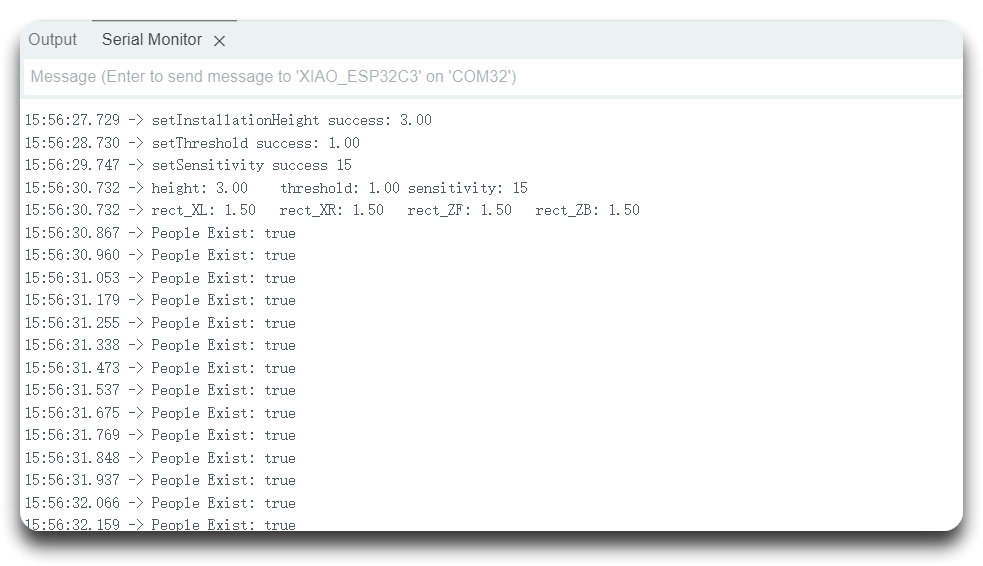
La salida será la siguiente en el Monitor Serie de Arduino:
Parpadear LED RGB
Este ejemplo demuestra cómo controlar un LED RGB usando la biblioteca NeoPixel.
- Paso 1. Descargar la biblioteca
Adafruit_NeoPixel
Navega a Sketch > Include Library > Manage Libraries..., y busca Adafruit_NeoPixel, instala la versión más reciente.
- Paso 2. Copia el siguiente código a un nuevo sketch:
#include <Adafruit_NeoPixel.h>
#include <Arduino.h>
const int pixelPin = D1;
Adafruit_NeoPixel pixels = Adafruit_NeoPixel(1, pixelPin, NEO_GRB + NEO_KHZ800);
void setup() {
Serial.begin(115200);
pixels.begin();
pixels.clear();
pixels.show();
}
void loop() {
for (int i = 0; i < 10; i++) {
pixels.setPixelColor(0, pixels.Color(255, 0, 0));
pixels.show();
delay(100);
pixels.setPixelColor(0, pixels.Color(0, 0, 0));
pixels.show();
delay(100);
}
for (int i = 255; i >= 0; i--) {
pixels.setPixelColor(0, pixels.Color(i, 0, 0));
pixels.show();
delay(10);
}
}
- Paso 3. Selecciona la placa correcta y el número de puerto para cargar el programa.
Una vez que el programa se haya cargado exitosamente, verás que el LED RGB en el lado derecho de los Módulos de Sensor mmWave está parpadeando.
Sensor de Luz (BH1750)
Este ejemplo muestra cómo leer valores de intensidad de luz usando el sensor BH1750.
- Paso 1. Descarga la librería
hp_BH1750
Navega a Sketch > Include Library > Manage Libraries..., y busca hp_BH1750, instala la versión más reciente.
- Paso 2. Copia el siguiente código a un nuevo sketch:
#include <Arduino.h>
#include <hp_BH1750.h>
hp_BH1750 BH1750;
void setup() {
Serial.begin(9600);
bool avail = BH1750.begin(BH1750_TO_GROUND);
if (!avail) {
Serial.println("No BH1750 sensor found!");
while (true) {}
}
Serial.printf("conversion time: %dms\n", BH1750.getMtregTime());
BH1750.start();
}
void loop() {
if (BH1750.hasValue()) {
float lux = BH1750.getLux();
Serial.println(lux);
BH1750.start();
}
}
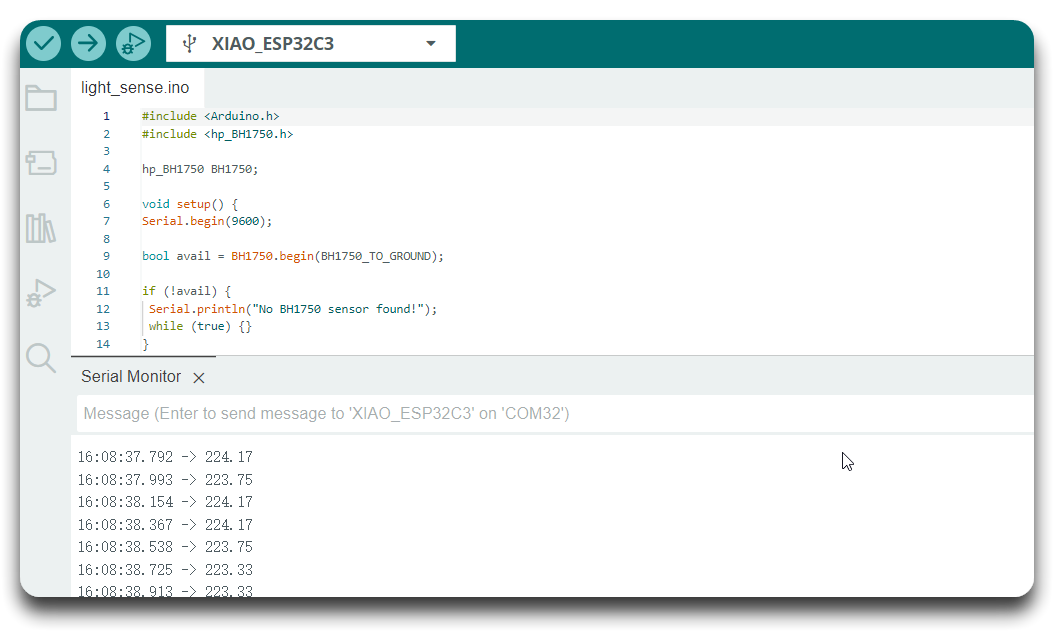
- Paso 3. Selecciona la placa correcta y el número de puerto para cargar el programa.
La salida será la siguiente en el Monitor Serie de Arduino:
API del Módulo de Caídas
Este ejemplo utiliza la clase SEEED_MR60FDA2 para interactuar con el sensor MR60FDA2 para la detección de caídas. Esto es lo que hace cada función clave:
-
mmWave.begin(&mmWaveSerial):- Inicializa el sensor para la comunicación, estableciendo la conexión serie entre la placa XIAO y el sensor MR60FDA2.
-
mmWave.setInstallationHeight(float height):- Establece la altura de instalación del radar, que es crucial para una detección precisa de caídas. El parámetro
heightespecifica la altura (en metros) a la cual está instalado el sensor, los parámetros de configuración de inicialización son2.2 m, con un rango válido típicamente entre 1 y 5 metros.
- Establece la altura de instalación del radar, que es crucial para una detección precisa de caídas. El parámetro
-
mmWave.setThreshold(float threshold):- Establece el umbral de detección de caídas. El umbral de caída predeterminado del radar es
0.6 m. Este valor determina la sensibilidad del radar en términos de detectar caídas basándose en la altura y distancia desde el sensor.
- Establece el umbral de detección de caídas. El umbral de caída predeterminado del radar es
-
mmWave.setSensitivity(uint32_t sensitivity):- Ajusta la sensibilidad del radar para la detección de caídas. El valor inicial de sensibilidad es
3, que representa un promedio de 3 marcos de datos. Y típicamente el valor varía de 3 a 10, con valores más altos haciendo que el sensor sea más receptivo a posibles caídas.
- Ajusta la sensibilidad del radar para la detección de caídas. El valor inicial de sensibilidad es
-
mmWave.getRadarParameters(float &height, float &threshold, uint32_t &sensitivity):- Recupera los parámetros de configuración actuales del radar, incluyendo la altura de instalación, el umbral de detección de caídas y la configuración de sensibilidad. Estos parámetros se devuelven a través de las variables de referencia.
-
mmWave.getHuman():- Verifica si se detecta presencia humana por el radar. Devuelve
truesi se detecta un humano, yfalseen caso contrario.
- Verifica si se detecta presencia humana por el radar. Devuelve
-
mmWave.getFall():- Determina si se ha detectado una caída. Esta función devuelve
truesi se detecta una caída yfalsesi no.
- Determina si se ha detectado una caída. Esta función devuelve
Actualización del firmware del módulo
Modificar el firmware del radar es una operación riesgosa, así que asegúrate de leer esta sección cuidadosamente antes de seguir cada paso con atención. Ten en cuenta que si un paso no se realiza correctamente, el Radar puede quedar inutilizado o inservible.
Nota especial: si compraste el Radar MR60BHA2, por favor no flashees el firmware ilegalmente de la siguiente manera, ¡¡¡¡seguramente dañará tu dispositivo!!!!
Primero, conecta los módulos XIAO ESP32C6 y MR60FDA2 juntos. Luego usa el siguiente código para programar XIAO.
#include <Arduino.h>
#include "Seeed_Arduino_mmWave.h"
// If the board is an ESP32, include the HardwareSerial library and create a
// HardwareSerial object for the mmWave serial communication
#ifdef ESP32
# include <HardwareSerial.h>
HardwareSerial mmWaveSerial(0);
#else
// Otherwise, define mmWaveSerial as Serial1
# define mmWaveSerial Serial1
#endif
void setup() {
// Initialize the serial communication for debugging
Serial.begin(115200);
while (!Serial) {
; // Wait for Serial to initialize
}
// Initialize the mmWaveSerial communication
mmWaveSerial.begin(115200);
}
void loop() {
// Check if there is data available from mmWaveSerial
while (mmWaveSerial.available() > 0) {
char receivedChar = mmWaveSerial.read();
Serial.write(receivedChar); // Forward data to Serial
}
// Check if there is data available from Serial
while (Serial.available() > 0) {
char receivedChar = Serial.read();
mmWaveSerial.write(receivedChar); // Forward data to mmWaveSerial
}
}
La función del código anterior es transmitir de forma transparente el puerto serie del módulo al puerto serie USB de XIAO, para así actualizar el firmware del módulo a través de XIAO.
Por favor conecta XIAO a tu PC durante el proceso de actualización.
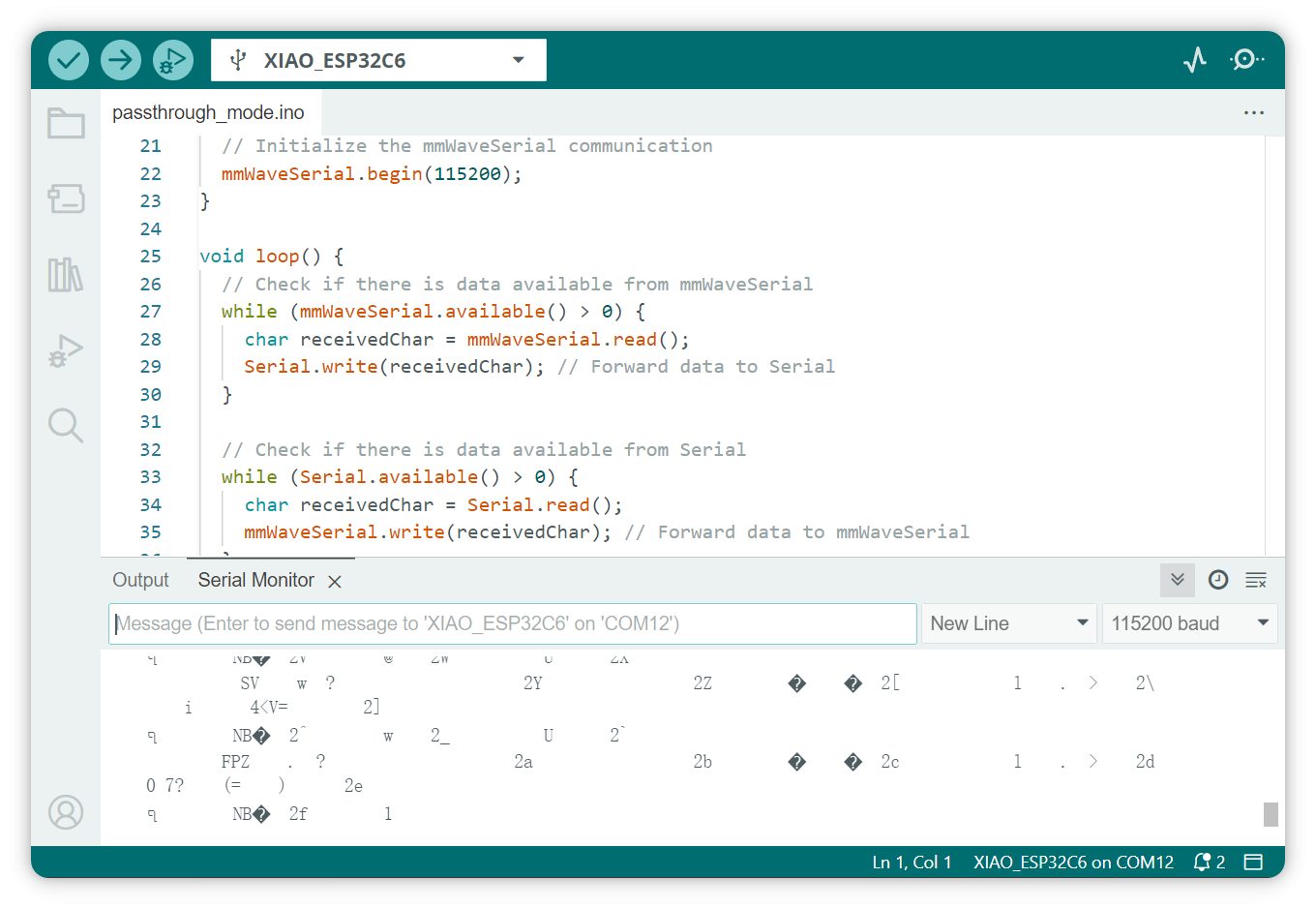
Verás los datos originales enviados por el módulo.
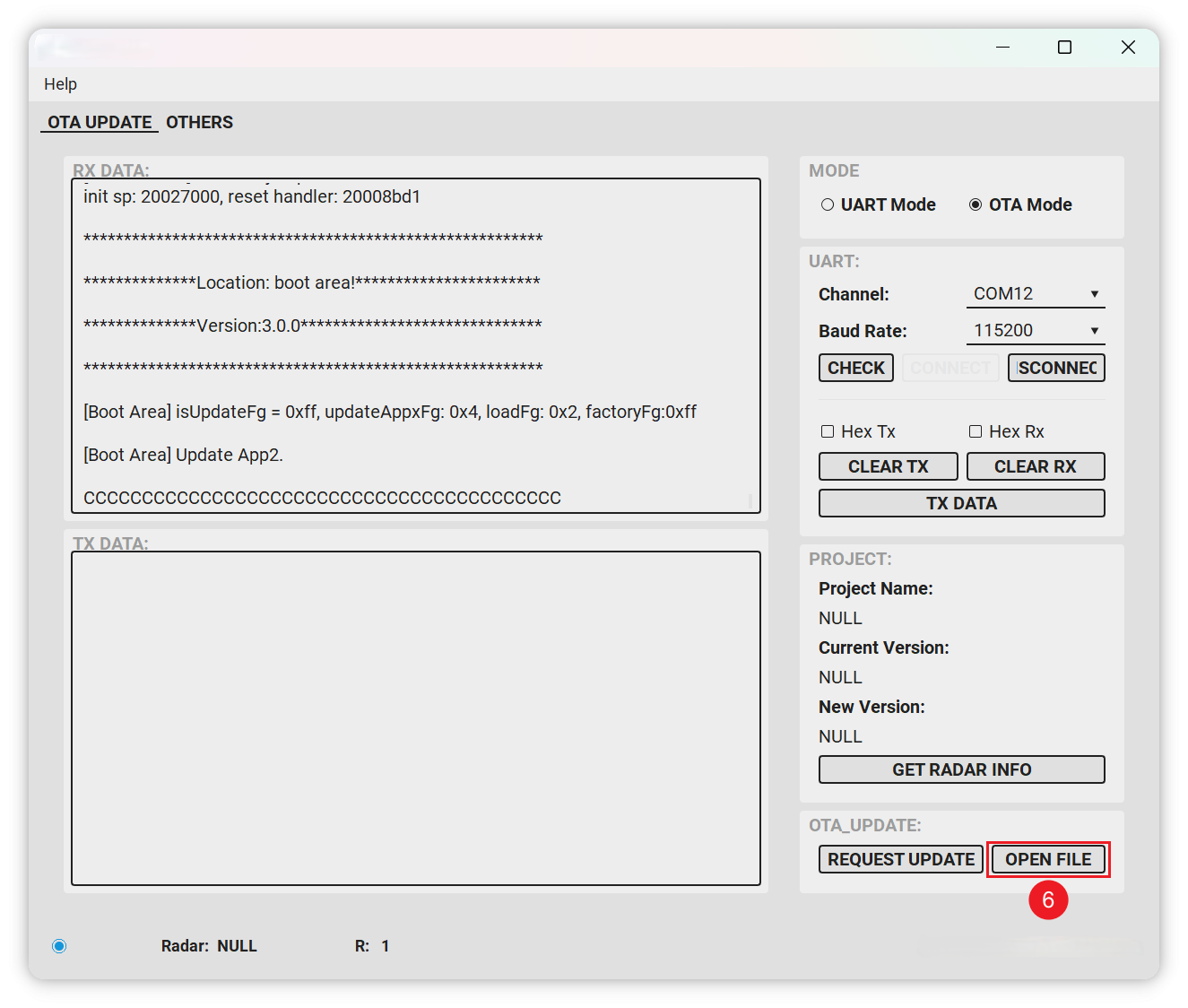
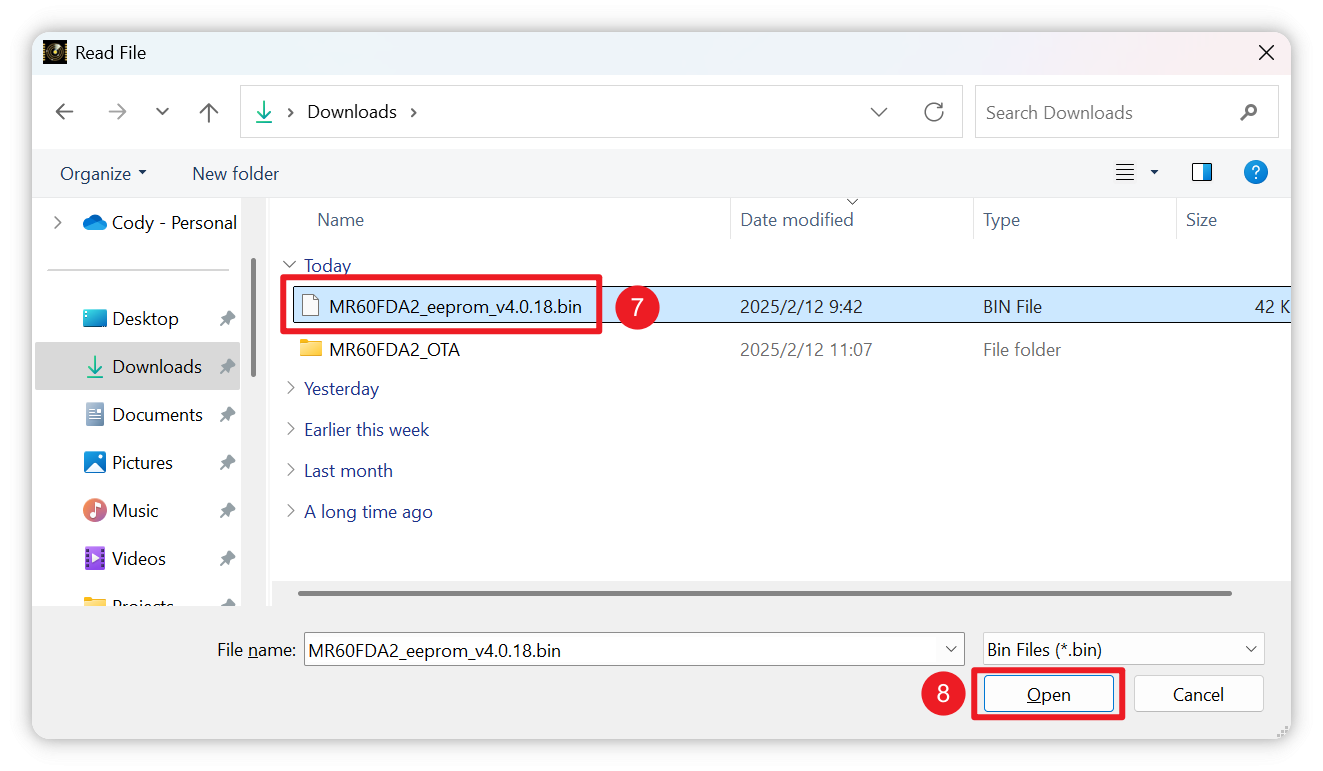
Luego necesitas descargar y descomprimir la herramienta OTA y el firmware aquí.
- Herramienta de actualización de firmware MR60FDA2: MR60FDA2_OTA.zip
- Firmware MR60FDA2 v4.0.18: MR60FDA2_eeprom_v4.0.18.bin
- Verifica y conecta al puerto serie (establece la velocidad de baudios a 115200)
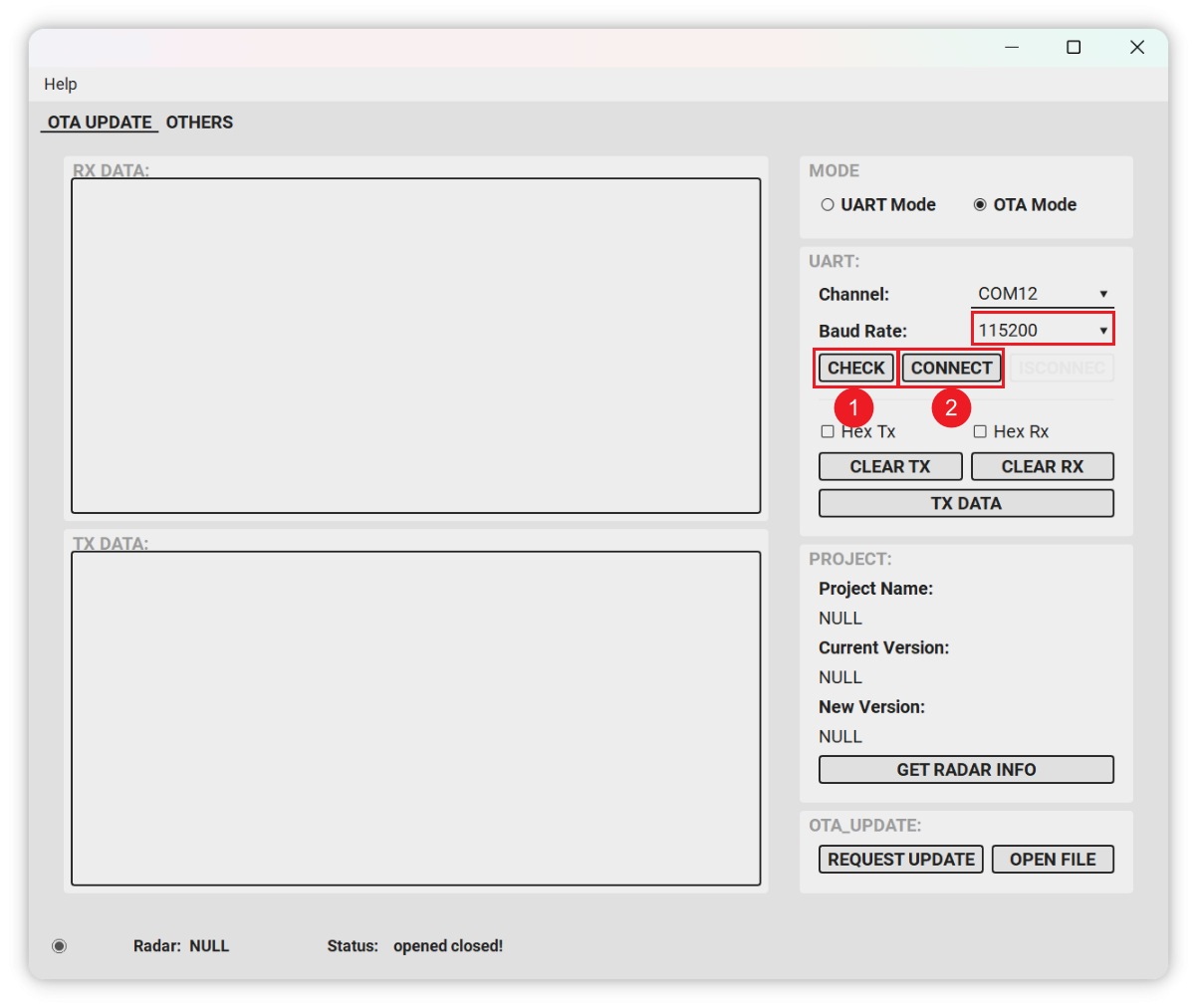
- Haz clic en "REQUEST UPDATE" para entrar al modo de actualización:
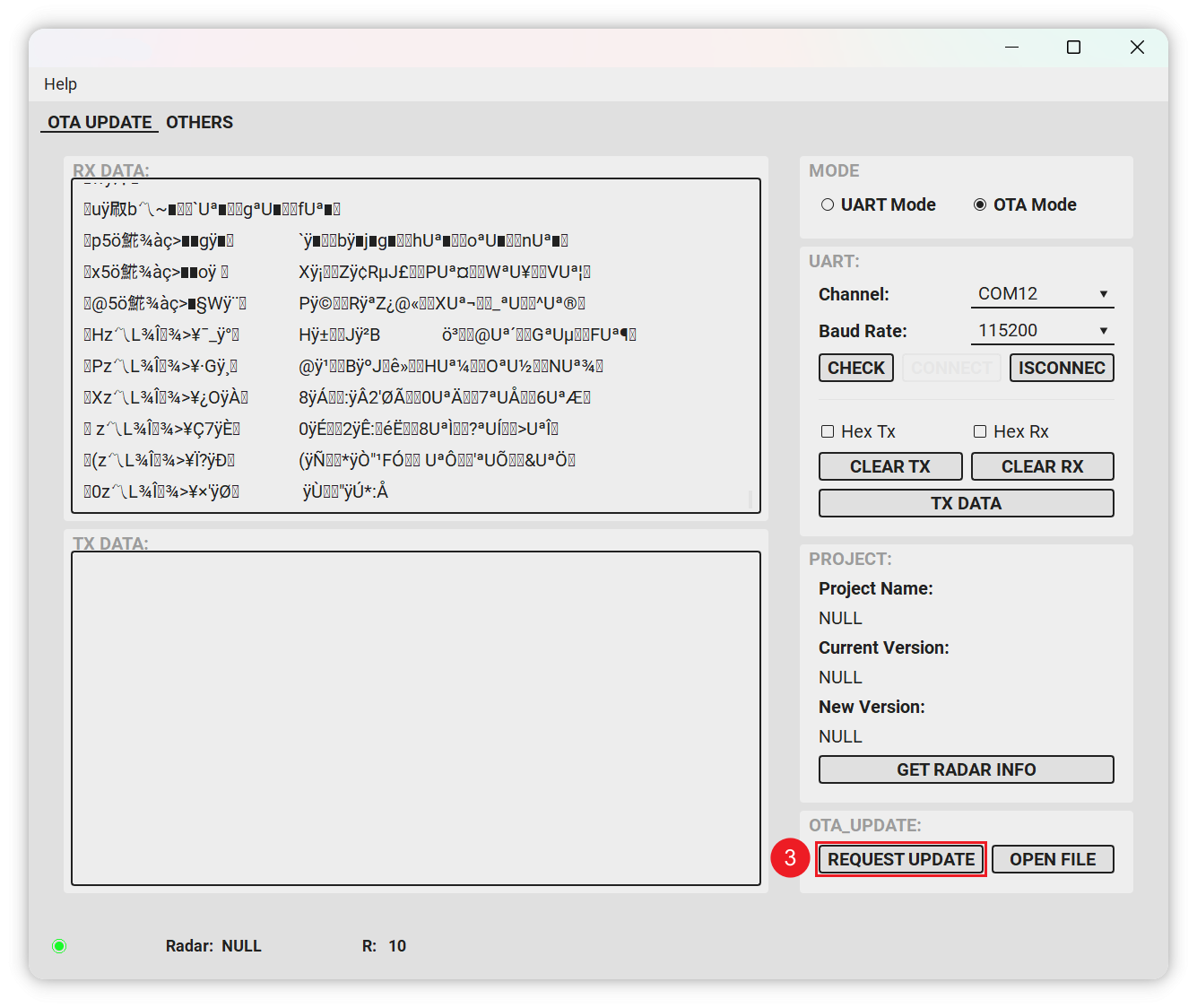
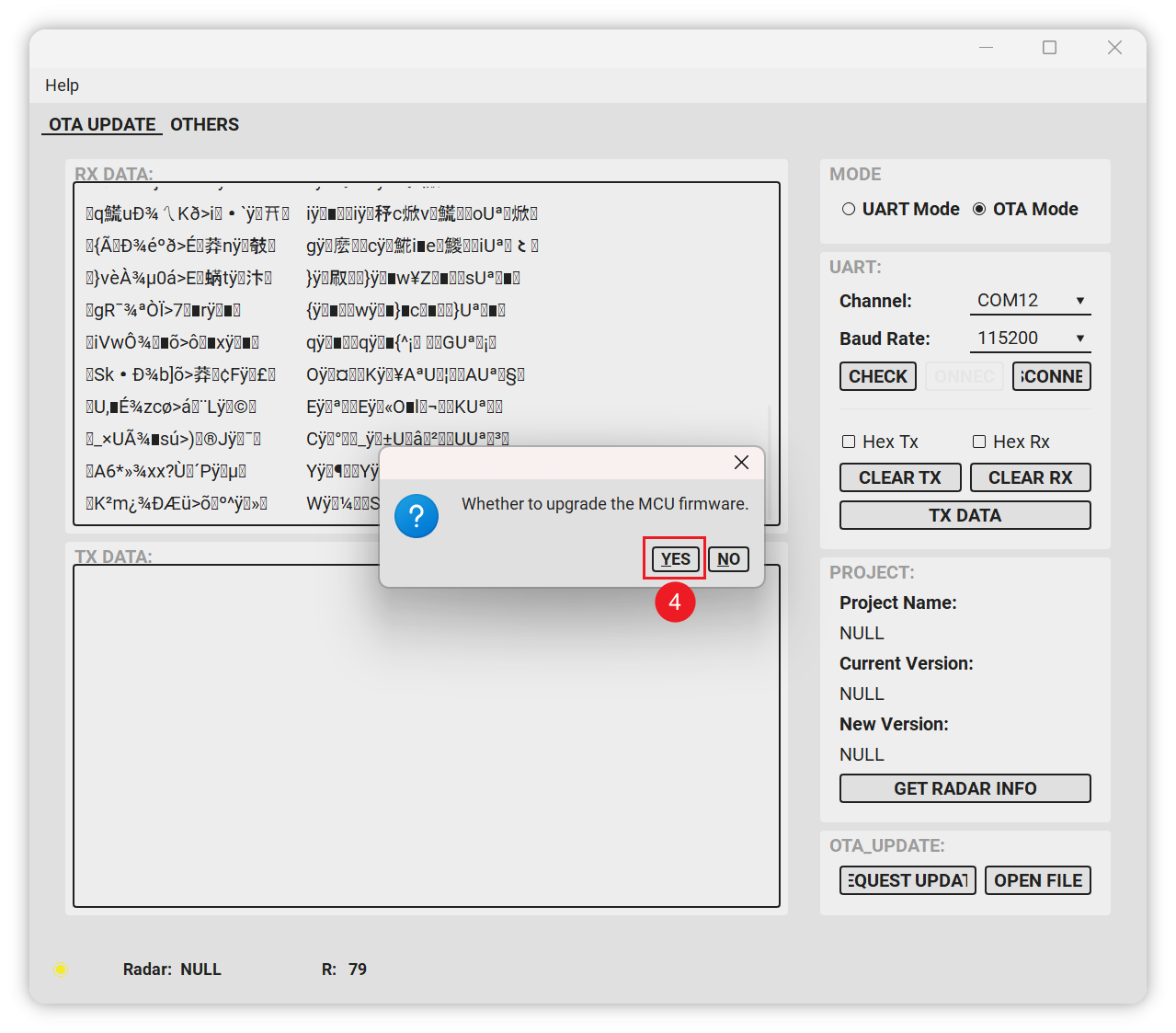
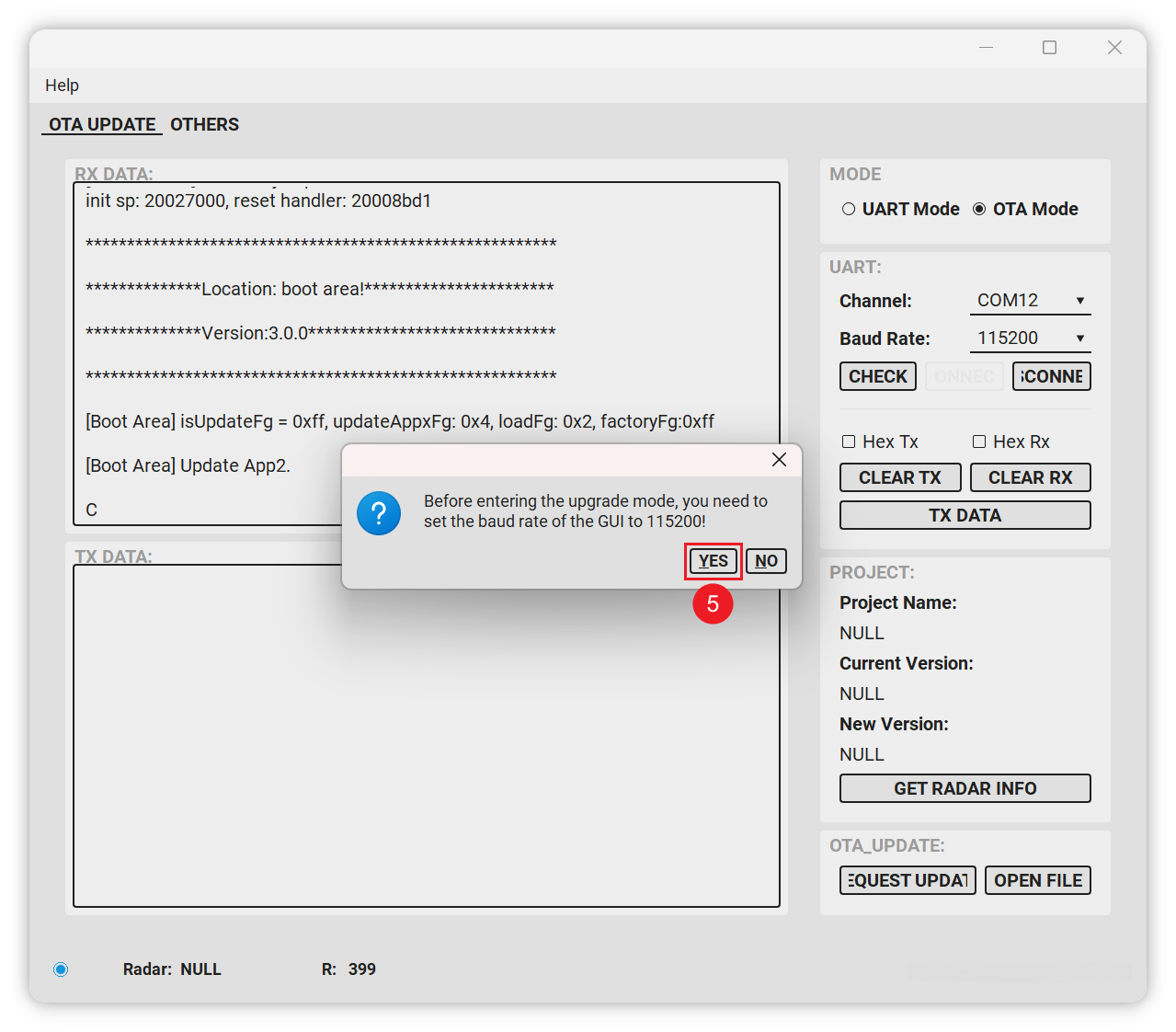
- Si se imprime "C" o "43", significa que el módulo ha entrado al modo de actualización.
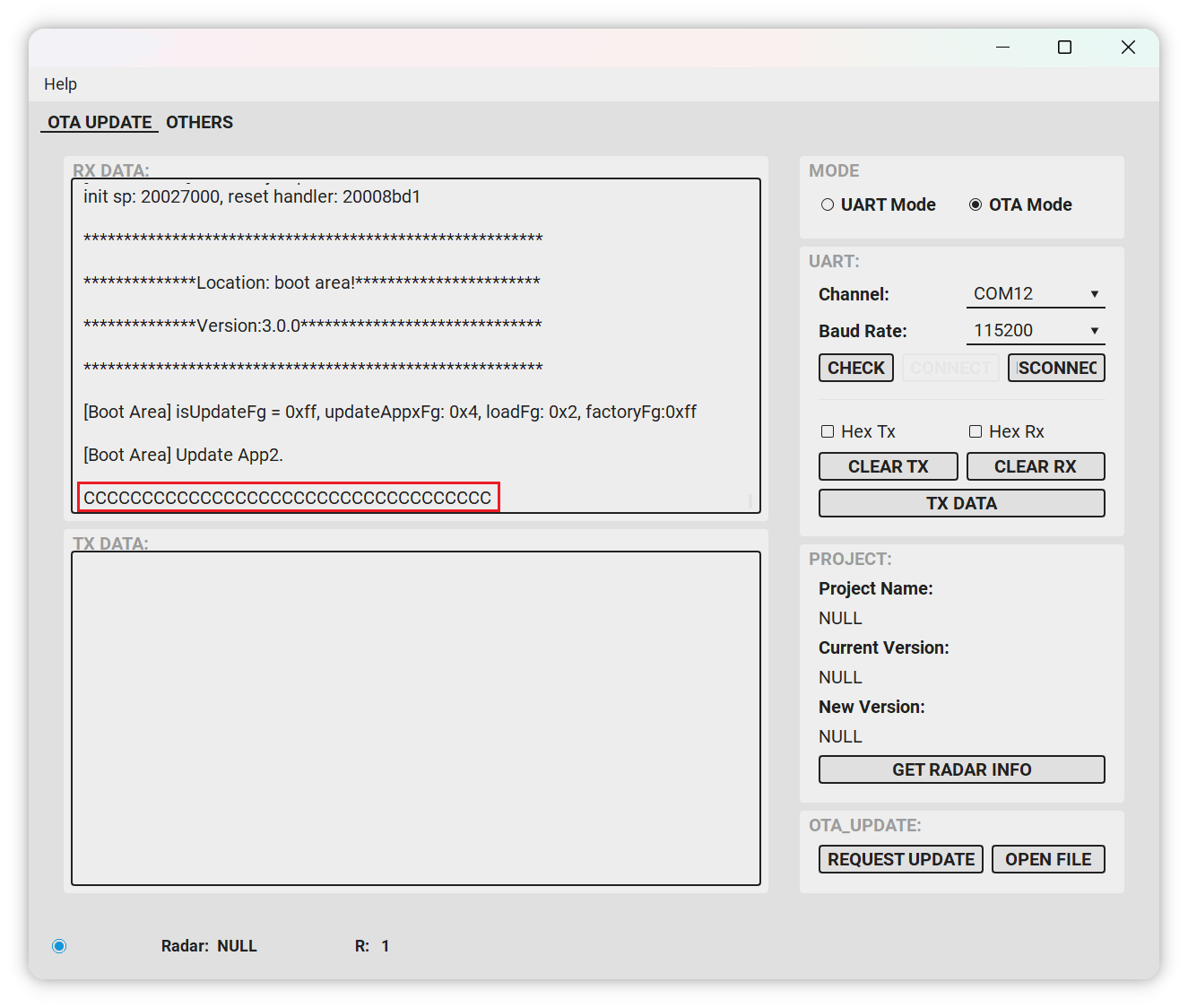
- Selecciona el firmware a actualizar. Después de la selección, entrará automáticamente al estado de actualización.
Una vez completada la actualización, saltará automáticamente al modo normal. Si no salta, apaga y reinicia, y luego usa la herramienta OTA para ver los datos del puerto serie.
- Después de que la actualización esté completa, puedes usar la herramienta OTA para leer la versión y los datos sin procesar.
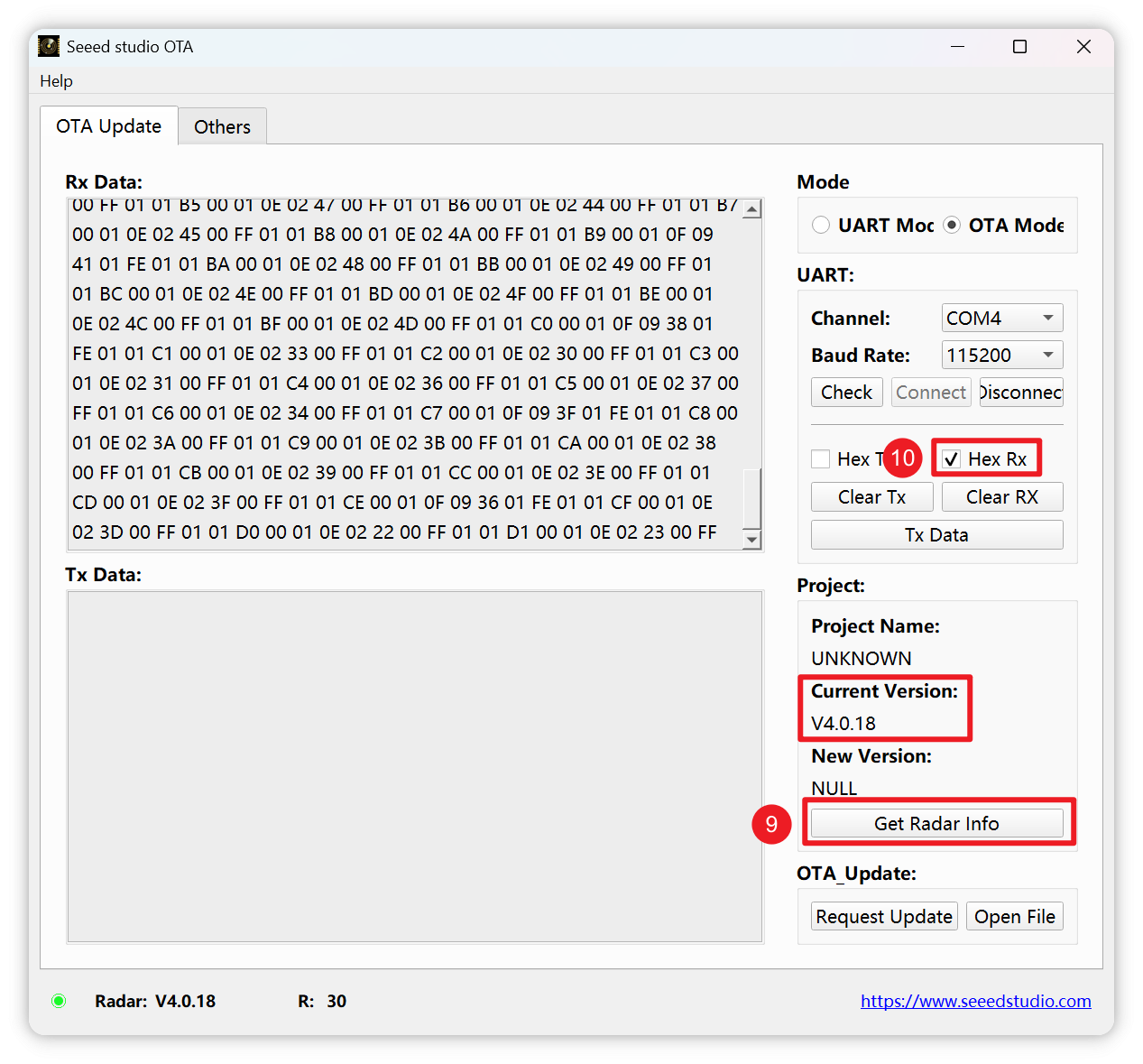
- Necesitas volver a flashear el firmware de XIAO ESP32C6 después de que la actualización esté completada.
Si en los pasos anteriores has operado incorrectamente causando que ocurra una anomalía y no has podido intentar grabar el firmware nuevamente y el radar no está funcionando correctamente, entonces el radar puede haber sufrido un brick debido a firmware corrupto. La única manera de intentar recuperar el dispositivo es referirse a los archivos y documentación aquí. Sin embargo, por favor entiende que no proporcionamos soporte técnico y asistencia para el dispositivo brickeado debido a operación incorrecta.
Abierto para Personalización
¿Quieres adaptar el kit a medida para que se ajuste a tus aplicaciones únicas?
Para más información sobre la generación de datos de nube de puntos 3D y la configuración de zonas de interferencia al personalizar módulos mmWave. Seeed proporciona servicios integrales de personalización de I+D y fabricación para un desarrollo rápido desde el concepto hasta la producción. Contáctanos en [email protected] para obtener más información.
El firmware y los algoritmos del radar no son de código abierto, y parámetros complejos del radar como la configuración de la altura de caída, la configuración de la posición de montaje, etc., requieren servicios personalizados, lo que puede implicar tarifas de personalización adicionales y MOQ.
Recursos
- STL: Carcasa 3D mmWave
- Repositorio GitHub: Accede al código completo y documentación en la página GitHub de la Biblioteca mmWave de Seeed.
- Documentación ESPHome: Para mayor personalización e integración, consulta la documentación de ESPHome.
- Herramienta de actualización de firmware MR60FDA2: MR60FDA2_OTA.zip
- Firmware MR60FDA2 v4.0.18: MR60FDA2_eeprom_v4.0.18.bin
- Software GUI MR60FDA2: Seeed_Studio_mmWave_Sensor_MR60FDA2_GUI.zip
- Esquemático del Sensor mmWave V1.0: mmWave_Sensor_SCH_V1.0.pdf
- Especificación Técnica del Módulo MR60FDA2: MR60FDA2_Fall_Detection_Module_Datasheet.pdf
- Manual de Interfaz Tiny Frame MR60FDA2: Seeed_Studio_TinyFrame_Interface_Fall_detection_V1.1.pdf
- Método de Recuperación de Firmware del Radar vía Jlink: Radar_Firmware_Recovery_Method-Jlink.zip
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarte diferentes tipos de soporte para asegurar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para atender diferentes preferencias y necesidades.