Isaac ROS AprilTag
Prerrequisitos
Antes de desplegar AprilTag, asegúrate de que el entorno básico de Isaac ROS se haya configurado exitosamente en tu reComputer Guía de Instalación. Si ROS2 no está instalado, consulta este documento.
Temas del Paquete Isaac ROS AprilTag
Temas Suscritos:
| Tema ROS | Interfaz | Descripción |
|---|---|---|
| image | sensor_msgs/Image | Flujo de cámara de entrada. |
| camera_info | sensor_msgs/CameraInfo | Flujo de intrínsecos de cámara de entrada. |
Temas Publicados:
| Tema ROS | Tipo | Descripción |
|---|---|---|
| tag_detections | isaac_ros_apriltag_interfaces/AprilTagDetectionArray | Array de mensajes de detección de AprilTag. |
| tf | tf2_msgs/TFMessage | Poses de AprilTags detectados (TagFamily:ID) relativas al frame_id de la cámara. |
1. Configuración del Entorno Isaac ROS AprilTag
Crear Espacio de Trabajo (Omitir si ya está hecho)
mkdir -p ~/workspaces/isaac_ros-dev/src
echo "export ISAAC_ROS_WS=${HOME}/workspaces/isaac_ros-dev/" >> ~/.bashrc
source ~/.bashrc
Clonar Paquetes y Datos de ROS Bag
cd ${ISAAC_ROS_WS}/src
git clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_apriltag.git
cd ${ISAAC_ROS_WS}/src/isaac_ros_apriltag && \
git lfs pull -X "" -I "resources/rosbags/quickstart.bag"
Entrar al Contenedor Docker
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.sh
2. Pruebas con Datos de ROS Bag
Instalar Paquete AprilTag (Dentro de Docker)
sudo apt-get install -y ros-humble-isaac-ros-apriltag
Lanzar Nodo AprilTag
ros2 launch isaac_ros_apriltag isaac_ros_apriltag.launch.py
Abrir Nueva Terminal (Dentro de Docker)
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.sh
Reproducir ROS Bag
ros2 bag play --loop src/isaac_ros_apriltag/resources/rosbags/quickstart.bag
Visualizar en RViz2
Abre RViz2 en una terminal local y añade componentes Image y TF:
ros2 run rviz2 rviz2

3. Pruebas con Cámara USB
Asegúrate de que ROS2 esté instalado localmente.
Crear Espacio de Trabajo para Cámara USB
cd ~/
mkdir -p usbcam/src
cd usbcam/src
Clonar y Construir Paquete usb_cam
git clone https://github.com/ros-drivers/usb_cam.git
cd ..
colcon build
echo "source ~/usbcam/install/setup.bash" >> ~/.bashrc
source ~/.bashrc
Verificar Formato de Cámara
Conecta la cámara y verifica su ruta de dispositivo (ej., /dev/video*). Prueba con:
cd ~/usbcam
ros2 run usb_cam usb_cam_node_exe

Formatos de Píxel Soportados:
rgb8, yuyv, yuyv2rgb, uyvy, uyvy2rgb, m4202rgb, mono8, mono16, y102mono8, raw_mjpeg
Configurar Cámara
- Modifica
pixel_formaten/usbcam/src/usb_cam/config/params_1.yaml.
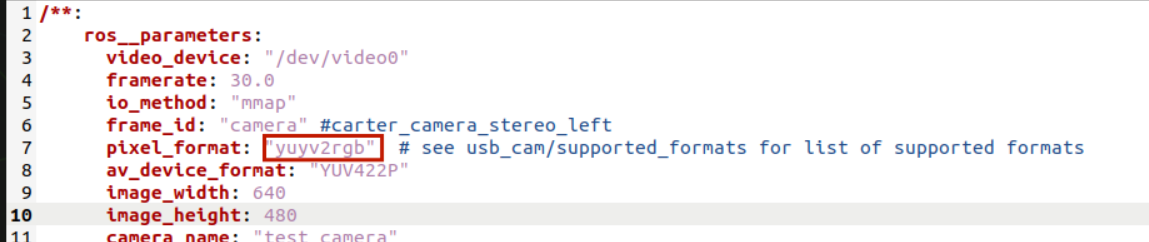
- Ajusta
frame_id(por defecto:camera). - Remapea nombres de temas en
/usbcam/src/usb_cam/launch/camera_config.py(líneas 58 y 62) para coincidir con los requisitos de AprilTag (/imagey/camera_info).

Reconstruir y Lanzar Cámara
cd ~/usbcam
colcon build
ros2 launch usb_cam camera.launch.py
Ejecutar Nodo AprilTag (Dentro de Docker)
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.sh
ros2 launch isaac_ros_apriltag isaac_ros_apriltag.launch.py
Visualizar en RViz2
Establece Fixed Frame al frame_id de la cámara, añade un componente Image suscrito a /image, y habilita TF.
Nota: Esta prueba usa un AprilTag de 200mm × 200mm.

Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarte diferentes tipos de soporte para asegurar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para atender diferentes preferencias y necesidades.