Comenzando con el Brazo Robótico StarAI con LeRobot
| Seguidor Viola | Líder Violin | Seguidor Cello |
|---|---|---|
 |  |  |
Introducción de Productos
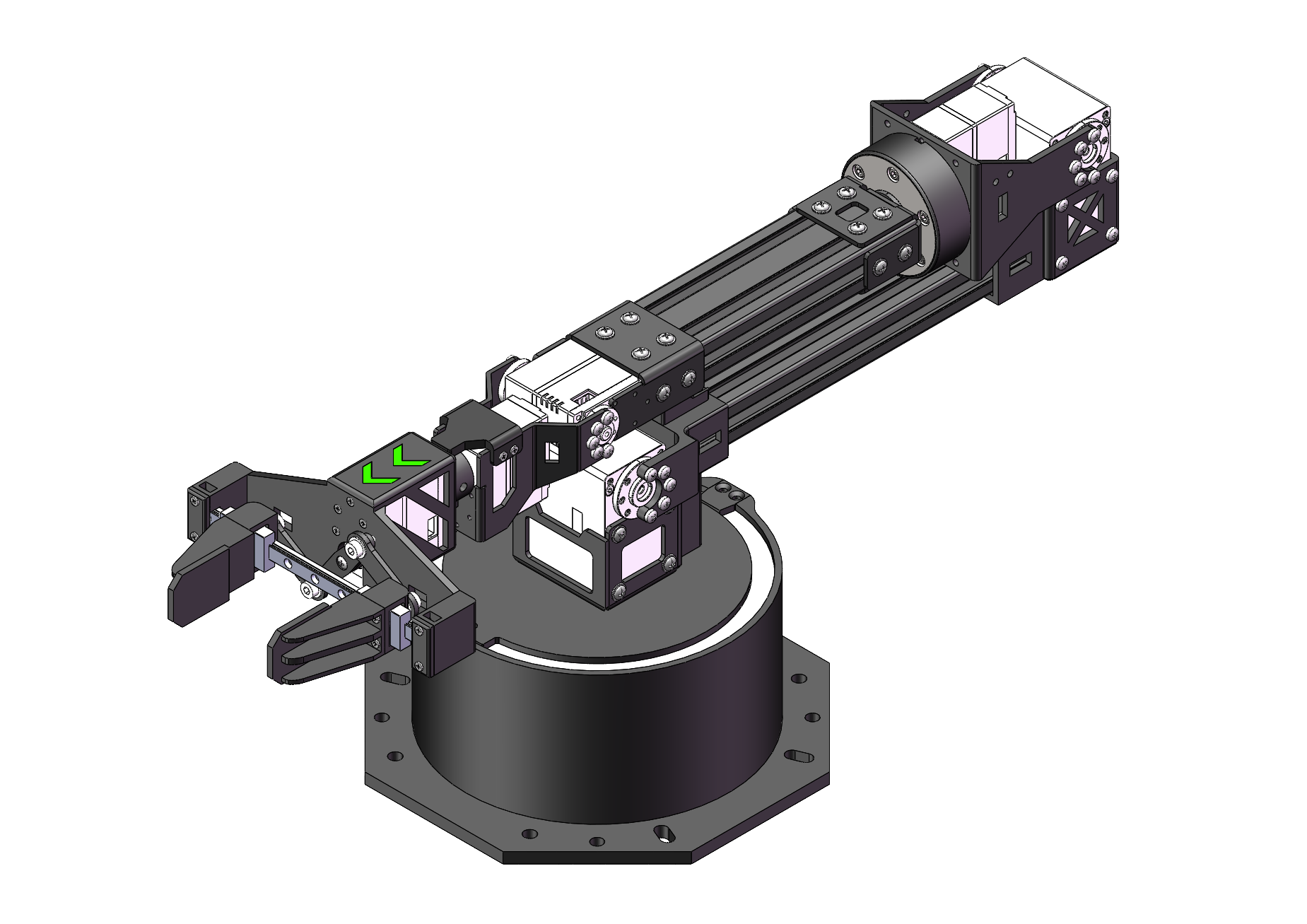
- Código Abierto y Amigable para Desarrolladores Es una solución de brazo robótico de 6+1 DoF de código abierto y amigable para desarrolladores de Fishion Star Technology Limited.
- Integración con LeRobot Diseñado para integración con Plataforma LeRobot, que proporciona modelos PyTorch, conjuntos de datos y herramientas para aprendizaje por imitación en tareas robóticas del mundo real — incluyendo recolección de datos, simulación, entrenamiento y despliegue.
- Recursos de Aprendizaje Integrales Proporciona recursos de aprendizaje de código abierto integrales como guías de ensamblaje y calibración, y ejemplos de tareas de agarre personalizadas para ayudar a los usuarios a comenzar rápidamente y desarrollar aplicaciones robóticas.
- Compatible con Nvidia Soporta despliegue en la plataforma reComputer Mini J4012 Orin NX 16GB.
Características Principales
- Listo para Usar — Sin Ensamblaje Requerido. Solo Desempaca y Sumérgete en el Mundo de la IA.
- 6+1 Grados de Libertad y un Alcance de 470mm — Construido para Versatilidad y Precisión.
- Alimentado por Servos de Bus Sin Escobillas Duales — Suave, Silencioso y Fuerte con hasta 300g de Carga Útil.
- Pinza Paralela con Apertura Máxima de 66mm — Puntas de Dedos Modulares para Flexibilidad de Reemplazo Rápido.
- Tecnología Exclusiva de Bloqueo Flotante — Congela Instantáneamente el Brazo Líder en Cualquier Posición con una Sola Presión.
Especificaciones

| Elemento | Brazo Seguidor | Viola | Brazo Líder |Violin | Brazo Seguidor |Cello |
|---|---|---|---|
| Grados de Libertad | 6+1 | 6+1 | 6+1 |
| Alcance | 470mm | 470mm | 670mm |
| Repetibilidad | 2mm | - | 2mm |
| Carga Útil de Trabajo | 300g (con 70% de Alcance) | - | 750g (con 70% de Alcance) |
| Servos | RX8-U50H-M x2 RA8-U25H-M x4 RA8-U26H-M x1 | RX8-U50H-M x2 RA8-U25H-M x4 RA8-U26H-M x1 | RX18-U100H-M x3 RX8-U50H-M x3 RX8-U51H-M x1 |
| Kit de Pinza Paralela | ✅ | - | ✅ |
| Rotación de Muñeca | Sí | Sí | Sí |
| Mantener en Cualquier Posición | Sí | Sí (con botón de mango) | Sí |
| Montaje de Cámara en Muñeca | Proporciona archivos de referencia de impresión 3D | Proporciona archivos de referencia de impresión 3D | |
| Funciona con LeRobot | ✅ | ✅ | ✅ |
| Funciona con ROS 2 | ✅ | ✅ | ✅ |
| Funciona con MoveIt2 | ✅ | ✅ | ✅ |
| Funciona con Gazebo | ✅ | ✅ | ✅ |
| Hub de Comunicación | UC-01 | UC-01 | UC-01 |
| Fuente de Alimentación | 12V10A/120w XT30 | 12V10A/120w XT30 | 12V25A/300w XT60 |
Para más información sobre los motores servo, por favor visita el siguiente enlace.
Configuración inicial del entorno
Para Ubuntu x86:
- Ubuntu 22.04
- CUDA 12+
- Python 3.10
- Torch 2.6
Para Jetson Orin:
- Jetson JetPack 6.0+
- Python 3.10
- Torch 2.6
Instalación y Depuración
Instalar LeRobot
Los entornos como pytorch y torchvision necesitan ser instalados basándose en tu CUDA.
- Instalar Miniconda: Para Jetson:
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
chmod +x Miniconda3-latest-Linux-aarch64.sh
./Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc
O, Para X86 Ubuntu 22.04:
mkdir -p ~/miniconda3
cd miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
rm ~/miniconda3/miniconda.sh
source ~/miniconda3/bin/activate
conda init --all
- Crear y activar un entorno conda fresco para lerobot
conda create -y -n lerobot python=3.10 && conda activate lerobot
- Clonar Lerobot:
git clone https://github.com/Seeed-Projects/lerobot.git ~/lerobot
- Cuando uses miniconda, instala ffmpeg en tu entorno:
conda install ffmpeg -c conda-forge
Esto usualmente instala ffmpeg 7.X para tu plataforma compilado con el codificador libsvtav1. Si libsvtav1 no es soportado (verifica codificadores soportados con ffmpeg -encoders), puedes:
- [En cualquier plataforma] Instalar explícitamente ffmpeg 7.X usando:
conda install ffmpeg=7.1.1 -c conda-forge
- [Solo en Linux] Instalar dependencias de construcción de ffmpeg y compilar ffmpeg desde el código fuente con libsvtav1, y asegúrate de usar el binario ffmpeg correspondiente a tu instalación con which ffmpeg.
- Instalar LeRobot:
cd ~/lerobot && pip install -e .
sudo apt remove brltty
Para dispositivos Jetson Jetpack (por favor asegúrate de instalar Pytorch-gpu y Torchvision desde el paso 5 antes de ejecutar este paso):
conda install -y -c conda-forge "opencv>=4.10.0.84" # Install OpenCV and other dependencies through conda, this step is only for Jetson Jetpack 6.0+
conda remove opencv # Uninstall OpenCV
pip3 install opencv-python==4.10.0.84 # Then install opencv-python via pip3
conda install -y -c conda-forge ffmpeg
conda uninstall numpy
pip3 install numpy==1.26.0 # This should match torchvision
6.Instalar Dependencias del Motor Fashionstar:
pip install lerobot_teleoperator_bimanual_leader
pip install lerobot_robot_bimanual_follower
- Verificar Pytorch y Torchvision
Dado que instalar el entorno lerobot vía pip desinstalará el Pytorch y Torchvision originales e instalará las versiones CPU de Pytorch y Torchvision, necesitas realizar una verificación en Python.
import torch
print(torch.cuda.is_available())
Si el resultado impreso es False, necesitas reinstalar Pytorch y Torchvision según el tutorial del sitio web oficial.
Si estás usando un dispositivo Jetson, instala Pytorch y Torchvision según este tutorial.
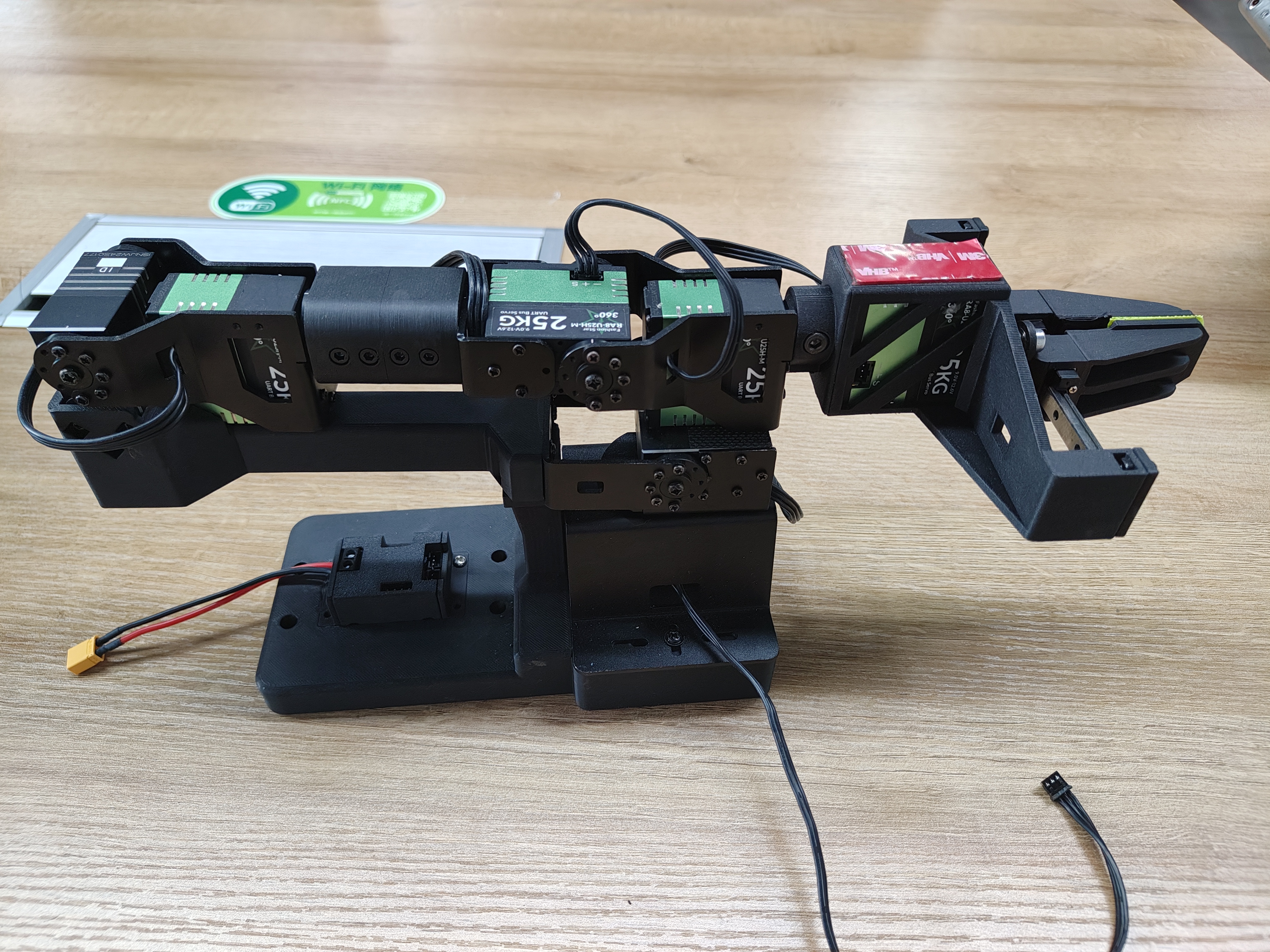
Desempacando el Brazo Robótico
El Kit de Brazo Robótico Incluye
- Brazo líder
- Brazo seguidor
- Controlador (mango)
- Pinza paralela
- Herramientas de instalación (tornillos, llave hexagonal)
- Abrazadera C ×2
- Placa de depuración UC-01 ×2
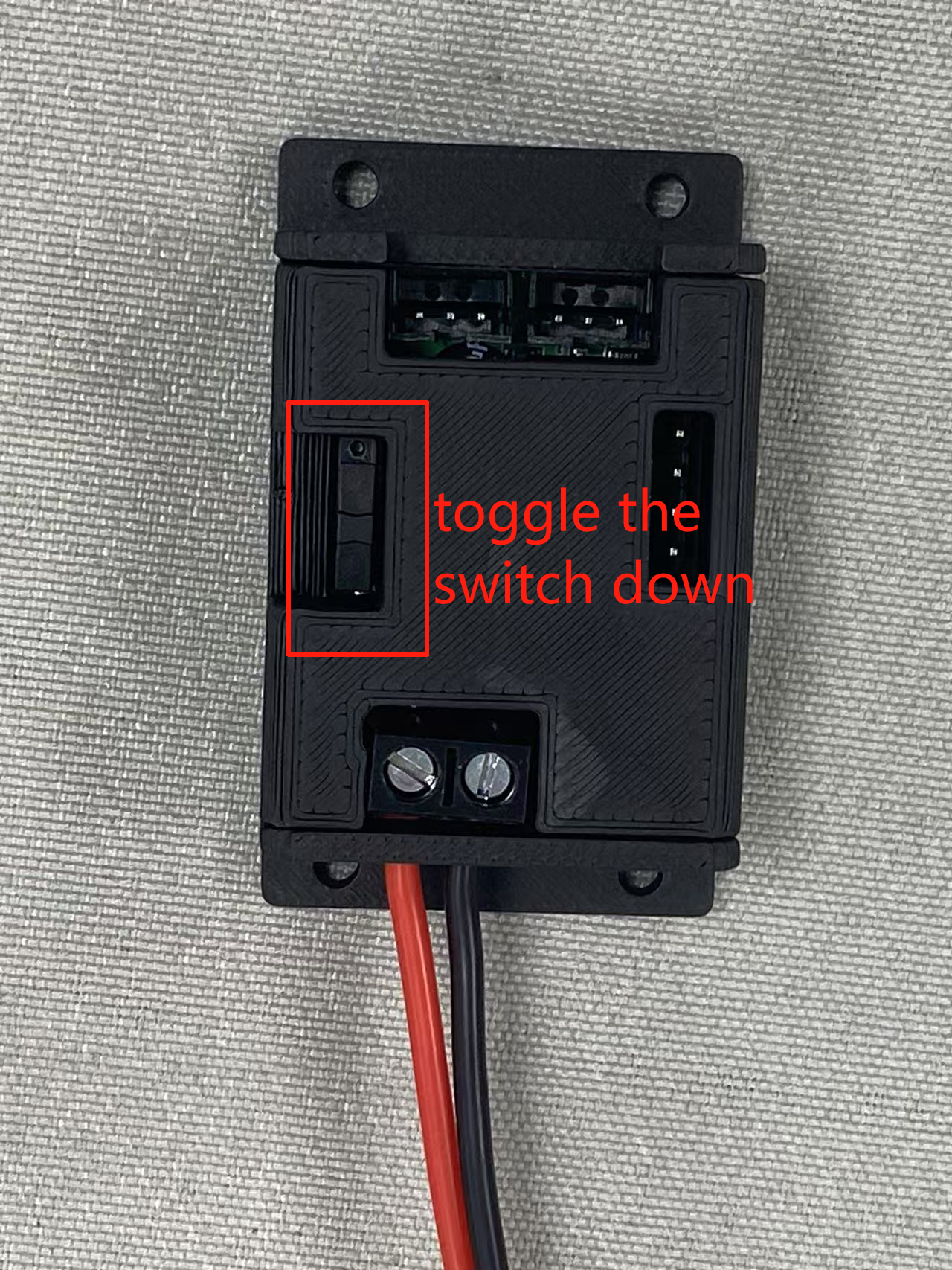
Interruptor de la placa de depuración UC-01:
Configurar Puerto del Brazo
Entra al directorio ~/lerobot:
cd ~/lerobot
Ejecuta el siguiente comando en la terminal para encontrar puertos USB asociados a tus brazos:
lerobot-find-port
Recuerda quitar el usb, de lo contrario la interfaz no será detectada.
Por ejemplo:
- Salida de ejemplo al identificar el puerto del brazo líder (ej.,
/dev/tty.usbmodem575E0031751en Mac, o posiblemente/dev/ttyUSB0en Linux): - Salida de ejemplo al identificar el puerto del brazo seguidor (ej.,
/dev/tty.usbmodem575E0032081en Mac, o posiblemente/dev/ttyUSB1en Linux):
Si no se puede identificar el puerto serie ttyUSB0, prueba las siguientes soluciones:
Lista todos los puertos USB.
lsusb

Una vez identificado, verifica la información del ttyusb.
sudo dmesg | grep ttyUSB

La última línea indica una desconexión porque brltty está ocupando el USB. Eliminar brltty resolverá el problema.
sudo apt remove brltty

Finalmente, usa el comando chmod.
sudo chmod 777 /dev/ttyUSB*
Es posible que necesites dar acceso a los puertos USB ejecutando:
sudo chmod 666 /dev/ttyUSB*
Calibrar
Para videos que cubren el Brazo Robótico StarAI desde el desempaquetado hasta la teleoperación, puedes consultar:
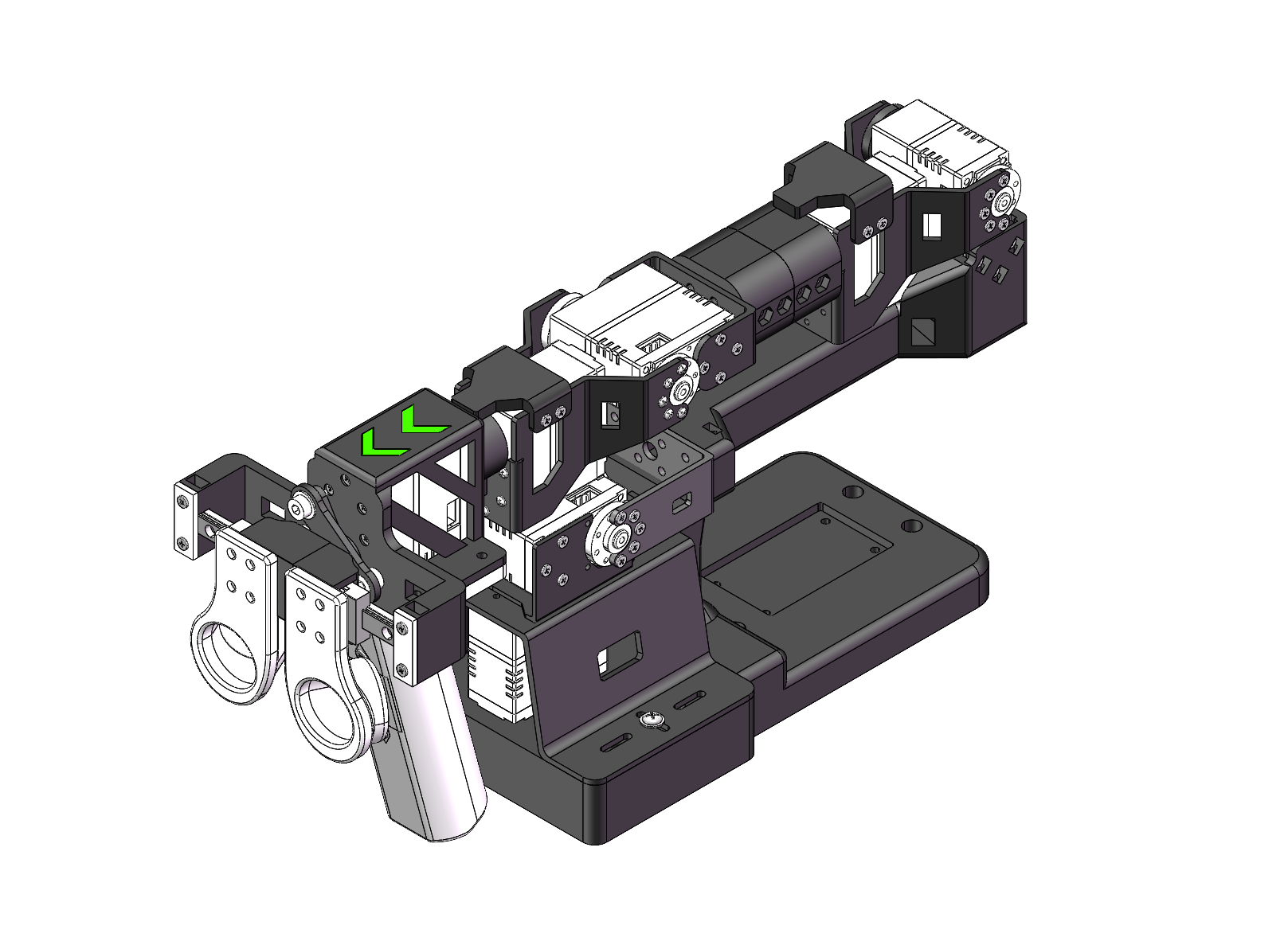
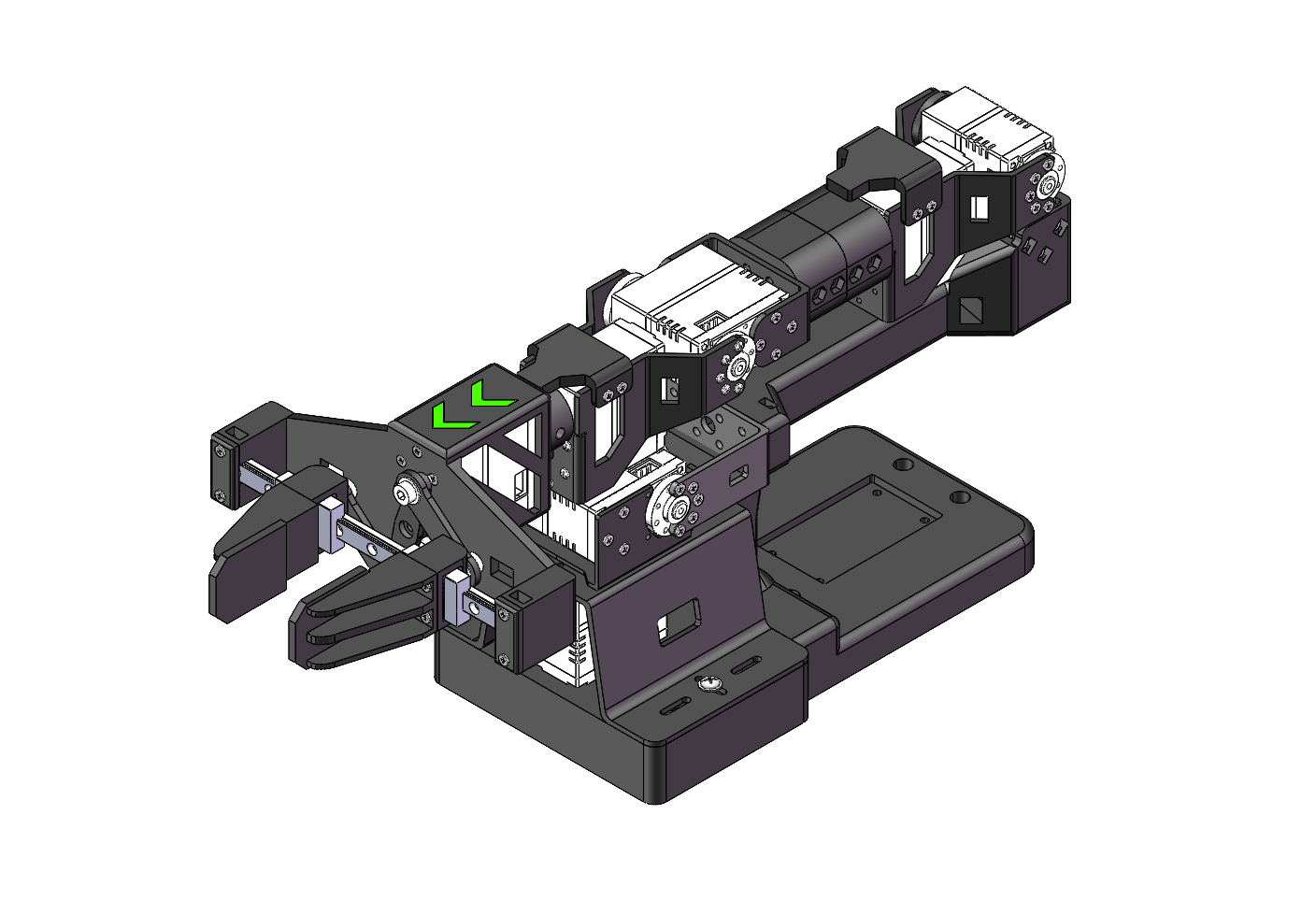
Mueve el brazo robótico a la posición inicial del brazo robótico (como se muestra en la figura a continuación) y ponlo en modo de espera, luego reconecta la fuente de alimentación.
Para la posición inicial de la nueva versión del brazo robótico, se debe prestar especial atención a asegurar que los servos de las Articulaciones 3, 4 y 5 se alineen estrictamente con las posiciones en la figura.
| Nuevo Brazo Líder de Violín | Antiguo Brazo Líder de Violín | Brazo Seguidor de Viola | Brazo Seguidor de Violonchelo |
|---|---|---|---|
 |  |  |  |
Por ejemplo:
| Brazo Líder Violin | Brazo Seguidor Viola |
|---|---|
 |  |
Tomando PC (Linux) y placa Jetson como ejemplos, el primer dispositivo USB insertado se mapeará a ttyUSB0, y el segundo dispositivo USB insertado se mapeará a ttyUSB1.
Por favor, presta atención a las interfaces de mapeo del líder y seguidor antes de ejecutar el código.
Brazo Robótico Líder
Conecta el líder a /dev/ttyUSB0, o modifica el parámetro --teleop.port, y luego ejecuta:
lerobot-calibrate --teleop.type=lerobot_teleoperator_violin --teleop.port=/dev/ttyUSB0 --teleop.id=my_awesome_staraiviolin_arm
Después del inicio, verás los valores del codificador de cada articulación. Necesitas calibrar manualmente cada articulación una por una: rota cada articulación a sus posiciones máxima y mínima. Para articulaciones sin topes límite, el rango de rotación no debe exceder 180° en sentido horario o 180° en sentido antihorario. Después de calibrar todas las articulaciones, presiona Enter para guardar la configuración.
Brazo Robótico Seguidor
Conecta el seguidor a /dev/ttyUSB1, o modifica el parámetro --teleop.port, y luego ejecuta:
Viola:
lerobot-calibrate --robot.type=lerobot_robot_viola --robot.port=/dev/ttyUSB1 --robot.id=my_awesome_staraiviola_arm
Cello:
lerobot-calibrate --robot.type=lerobot_robot_cello --robot.port=/dev/ttyUSB1 --robot.id=my_awesome_staraicello_arm
Después del inicio, verás los valores del codificador de cada articulación. Necesitas calibrar manualmente cada articulación una por una: rota cada articulación a sus posiciones máxima y mínima. Para articulaciones sin topes límite, el rango de rotación no debe exceder 180° en sentido horario o 180° en sentido antihorario. Después de calibrar todas las articulaciones, presiona Enter para guardar la configuración.
Los archivos de calibración se guardarán en las siguientes rutas: ~/.cache/huggingface/lerobot/calibration/robots y ~/.cache/huggingface/lerobot/calibration/teleoperators.
Configuración de Calibración de Brazo Dual
Tutorial
Brazo Robótico Líder
Conecta left_arm_port a /dev/ttyUSB0 y right_arm_port a /dev/ttyUSB2, o modifica los parámetros --teleop.left_arm_port y --teleop.right_arm_port, y luego ejecuta:
lerobot-calibrate --teleop.type=lerobot_teleoperator_bimanual_leader --teleop.left_arm_port=/dev/ttyUSB0 --teleop.right_arm_port=/dev/ttyUSB2 --teleop.id=bi_starai_violin_leader
Después del inicio, verás los valores del codificador de cada articulación. Necesitas calibrar manualmente cada articulación una por una: rota cada articulación a sus posiciones máxima y mínima. Para articulaciones sin topes límite, el rango de rotación no debe exceder 180° en sentido horario o 180° en sentido antihorario. Después de calibrar todas las articulaciones, presiona Enter para guardar la configuración.
Brazo Robótico Seguidor
Conecta left_arm_port a /dev/ttyUSB1 y right_arm_port a /dev/ttyUSB3, o modifica los parámetros --robot.left_arm_port y --robot.right_arm_port, y luego ejecuta:
Vioa:
lerobot-calibrate --robot.type=lerobot_robot_bimanual_follower --robot.arm_name=starai_viola --robot.left_arm_port=/dev/ttyUSB1 --robot.right_arm_port=/dev/ttyUSB3 --robot.id=bi_starai_viola_follower
Cello:
lerobot-calibrate --robot.type=lerobot_robot_bimanual_follower --robot.arm_name=starai_cello --robot.left_arm_port=/dev/ttyUSB1 --robot.right_arm_port=/dev/ttyUSB3 --robot.id=bi_starai_cello_follower
Después del inicio, verás los valores del codificador de cada articulación. Necesitas calibrar manualmente cada articulación una por una: rota cada articulación a sus posiciones máxima y mínima. Para articulaciones sin topes límite, el rango de rotación no debe exceder 180° en sentido horario o 180° en sentido antihorario. Después de calibrar todas las articulaciones, presiona Enter para guardar la configuración.
La diferencia entre configuraciones de brazo único y brazo dual radica en los parámetros --teleop.type y --robot.type. Además, las configuraciones de brazo dual requieren puertos USB separados para los brazos izquierdo y derecho, totalizando cuatro puertos USB: --teleop.left_arm_port, --teleop.right_arm_port, --robot.left_arm_port, y --robot.right_arm_port.
Si usas una configuración de brazo dual, necesitas modificar manualmente los tipos de archivo del brazo robótico --teleop.type y --robot.type, así como los puertos USB --teleop.left_arm_port, --teleop.right_arm_port, --robot.left_arm_port, y --robot.right_arm_port, para adaptarse a los comandos de teleoperación, recolección de datos, entrenamiento y evaluación.
Teleoperar
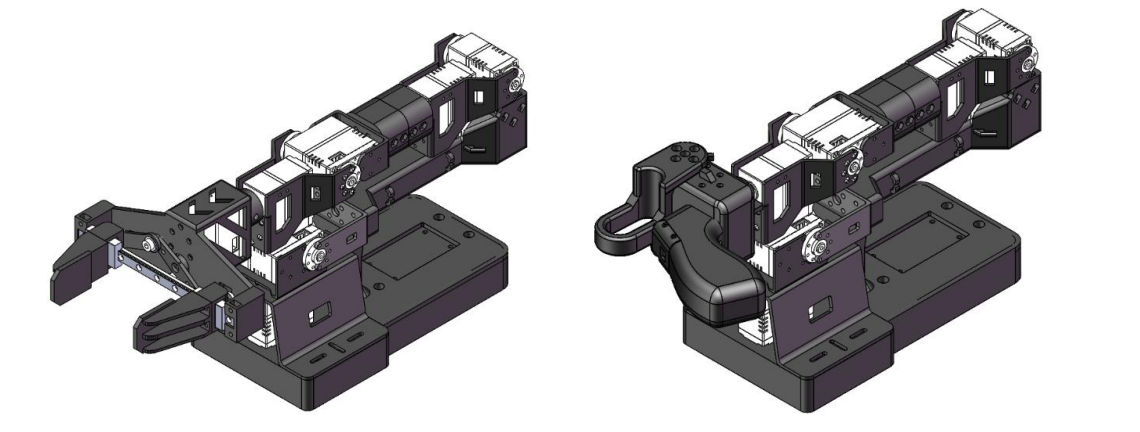
Mueve el brazo a la posición mostrada en el diagrama y ponlo en espera.
| Brazo Líder Violin | Brazo Seguidor Viola |
|---|---|
| |
¡Entonces estarás listo para teleoperar tu robot (No mostrará las cámaras)! Ejecuta este script simple:
Violin&Viola:
lerobot-teleoperate \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm
Violin&Cello:
lerobot-teleoperate \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm
Brazo Dual
Violin&Viola:
lerobot-teleoperate \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_viola_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader
Violin&Cello:
lerobot-teleoperate \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_cello_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader
El comando de operación remota detectará automáticamente los siguientes parámetros:
- Identificar cualquier calibración faltante e iniciar el procedimiento de calibración.
- Conectar el robot y el dispositivo de operación remota e iniciar la operación remota.
Después de que el programa inicie, la Tecnología Hover Lock permanece funcional.
Agregar cámaras
Si usas la Cámara de Profundidad Orbbec Gemini2

- 🚀 Paso 1: Instalar el Entorno de Dependencias del SDK de Orbbec
-
Clonar el repositorio
pyorbbeccd ~/
git clone https://github.com/orbbec/pyorbbecsdk.git -
Descargar e instalar el archivo .whl correspondiente para el SDK
Ve a pyorbbecsdk Releases,
selecciona e instala según tu versión de Python. Por ejemplo:pip install pyorbbecsdk-x.x.x-cp310-cp310-linux_x86_64.whl -
Instalar dependencias en el directorio
pyorbbeccd ~/pyorbbecsdk
pip install -r requirements.txtForzar la degradación de la versión de
numpya1.26.0pip install numpy==1.26.0
Los mensajes de error rojos pueden ser ignorados.
- Clonar el SDK de Orbbec en el directorio
~/lerobot/src/cameras
cd ~/lerobot/src/cameras
git clone https://github.com/ZhuYaoHui1998/orbbec.git
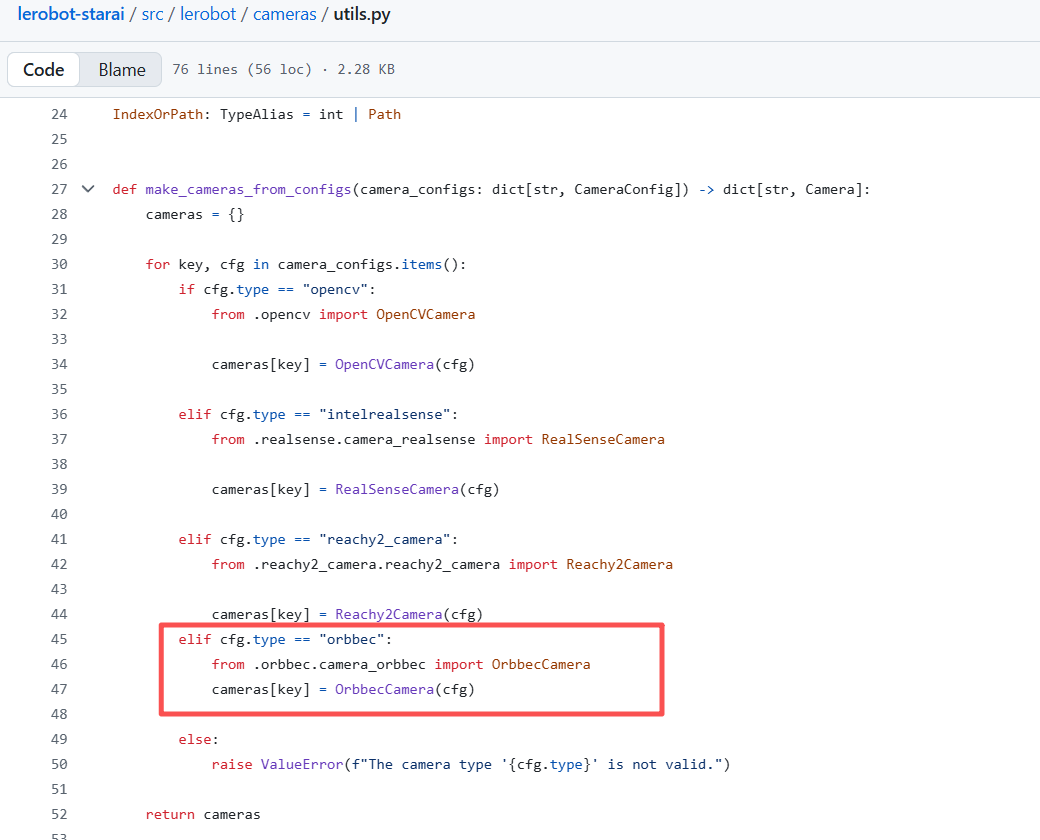
- Modificar utils.py e init.py
- Encuentra
utils.pyen el directorio~/lerobot/src/lerobot/cameras, y añade el siguiente código en la línea 40:
elif cfg.type == "orbbec":
from .orbbec.camera_orbbec import OrbbecCamera
cameras[key] = OrbbecCamera(cfg)
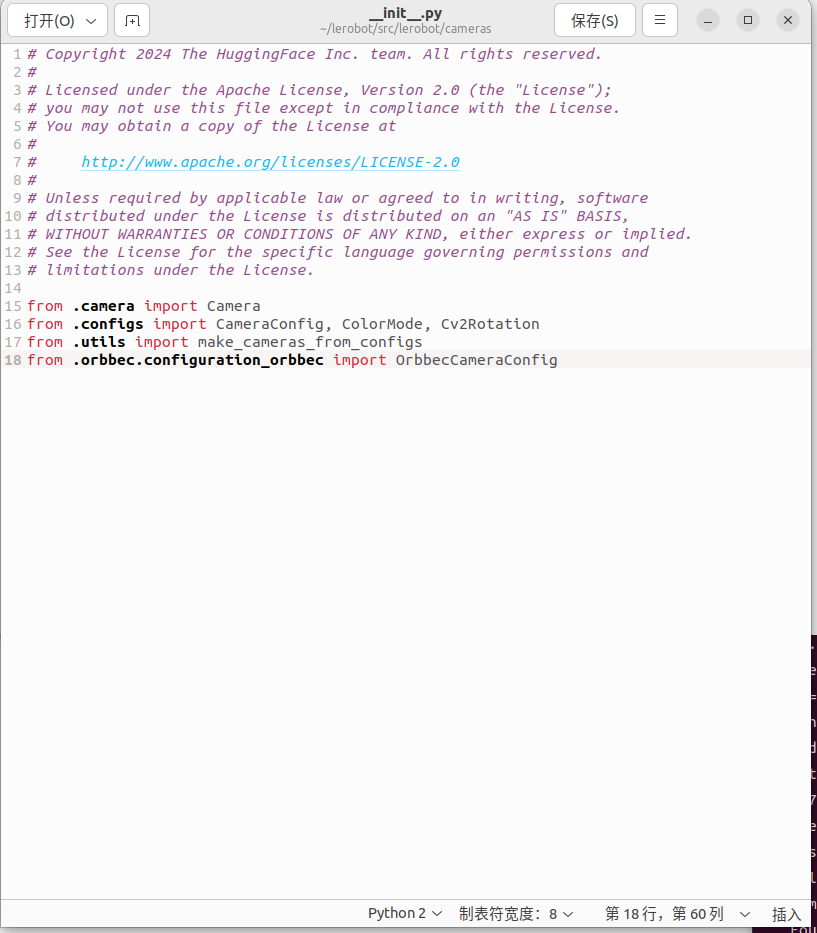
- Encuentra
__init__.pyen el directorio~/lerobot/src/lerobot/cameras, y añade el siguiente código en la línea 18:
from .orbbec.configuration_orbbec import OrbbecCameraConfig
- 🚀 Paso 2: Llamada de Función y Ejemplos
En todos los siguientes ejemplos, reemplaza starai_viola con el modelo real del brazo robótico que estés usando (ej., so100 / so101).
Hemos añadido el hiperparámetro focus_area. Dado que los datos de profundidad que están demasiado lejos no tienen sentido para el brazo robótico (no puede alcanzar o agarrar objetos), los datos de profundidad menores o mayores que el focus_area se mostrarán en negro. El focus_area predeterminado es (20, 600).
Actualmente, la única resolución soportada es ancho: 640, alto: 880.
Violin&Viola:
lerobot-teleoperate \
--robot.type=lerobot_starai_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: orbbec, width: 640, height: 880, fps: 30, focus_area:[60,300]}}" \
--teleop.type=starai_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true
Violin&Cello:
lerobot-teleoperate \
--robot.type=lerobot_starai_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--robot.cameras="{ up: {type: orbbec, width: 640, height: 880, fps: 30, focus_area:[60,300]}}" \
--teleop.type=starai_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true
Para tareas posteriores como recolección de datos, entrenamiento y evaluación, el proceso es el mismo que para comandos RGB regulares. Solo necesitas reemplazar la parte relevante en el comando RGB regular con:
--robot.cameras="{ front: {type: orbbec, width: 640, height: 880, fps: 30, focus_area:(20,600)}}" \
También puedes añadir una cámara RGB monocular adicional después.
Después de insertar tus dos cámaras USB, ejecuta el siguiente script para verificar los números de puerto de las cámaras. Es importante recordar que la cámara no debe estar conectada a un Hub USB; en su lugar, debe estar conectada directamente al dispositivo. La velocidad más lenta de un Hub USB puede resultar en la incapacidad de leer datos de imagen.
lerobot-find-cameras opencv # or realsense for Intel Realsense cameras
La terminal imprimirá la siguiente información. Por ejemplo, la cámara del portátil es index 2, y la cámara USB es index 4.
--- Detected Cameras ---
Camera #0:
Name: OpenCV Camera @ /dev/video2
Type: OpenCV
Id: /dev/video2
Backend api: V4L2
Default stream profile:
Format: 0.0
Width: 640
Height: 480
Fps: 30.0
--------------------
Camera #1:
Name: OpenCV Camera @ /dev/video4
Type: OpenCV
Id: /dev/video4
Backend api: V4L2
Default stream profile:
Format: 0.0
Width: 640
Height: 360
Fps: 30.0
--------------------
Finalizing image saving...
Image capture finished. Images saved to outputs/captured_images
Puedes encontrar las imágenes capturadas por cada cámara en el directorio outputs/images_from_opencv_cameras y verificar la información del índice de puerto correspondiente a las cámaras en diferentes posiciones.
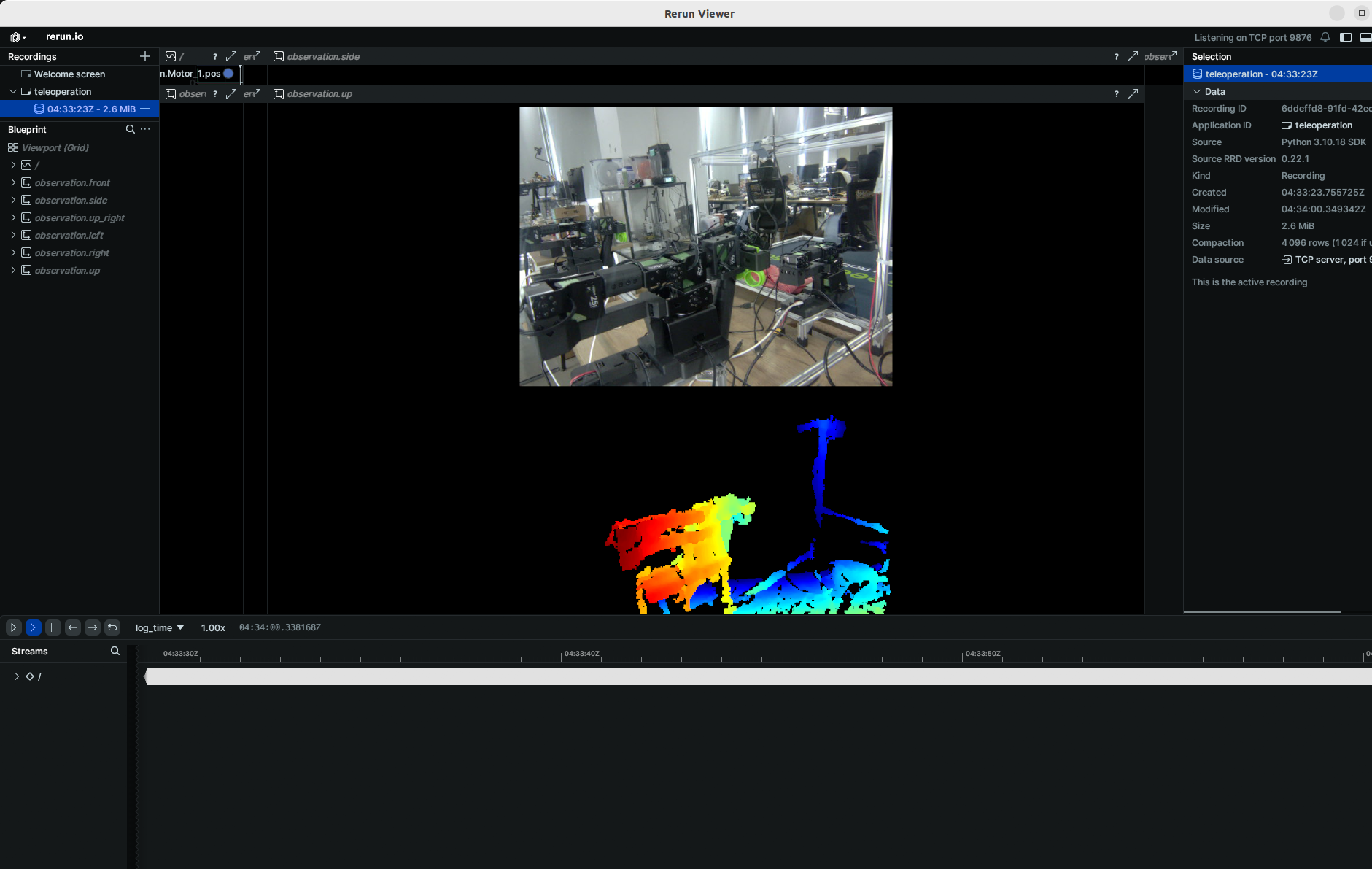
Después de confirmar las cámaras externas, reemplaza la información de la cámara a continuación con tu información real de la cámara, y podrás mostrar las cámaras en tu computadora durante la operación remota:
Violin&Viola:
lerobot-teleoperate \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true
Las imágenes en formato fourcc: "MJPG" están comprimidas. Puedes probar resoluciones más altas, y también puedes intentar el formato YUYV. Sin embargo, este último reducirá la resolución de imagen y FPS, causando retraso en la operación del brazo robótico. Actualmente, bajo el formato MJPG, puede soportar 3 cámaras a una resolución de 1920*1080 manteniendo 30FPS. Dicho esto, conectar 2 cámaras a una computadora a través del mismo USB HUB aún no se recomienda.
Violin&Cello:
lerobot-teleoperate \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true
Las imágenes en formato fourcc: "MJPG" están comprimidas. Puedes probar resoluciones más altas, y también puedes intentar el formato YUYV. Sin embargo, este último reducirá la resolución de imagen y FPS, causando retraso en la operación del brazo robótico. Actualmente, bajo el formato MJPG, puede soportar 3 cámaras a una resolución de 1920*1080 manteniendo 30FPS. Dicho esto, conectar 2 cámaras a una computadora a través del mismo USB HUB aún no se recomienda.
Brazo Dual
Violin&Viola:
lerobot-teleoperate \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_viola_follower \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--display_data=true
Violin&Cello:
lerobot-teleoperate \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_cello_follower \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--display_data=true
Las imágenes en formato fourcc: "MJPG" están comprimidas. Puedes probar resoluciones más altas, y también puedes intentar el formato YUYV. Sin embargo, este último reducirá la resolución de imagen y FPS, causando retraso en la operación del brazo robótico. Actualmente, bajo el formato MJPG, puede soportar 3 cámaras a una resolución de 1920*1080 manteniendo 30FPS. Dicho esto, conectar 2 cámaras a una computadora a través del mismo USB HUB aún no se recomienda.
Si encuentras un error como este.
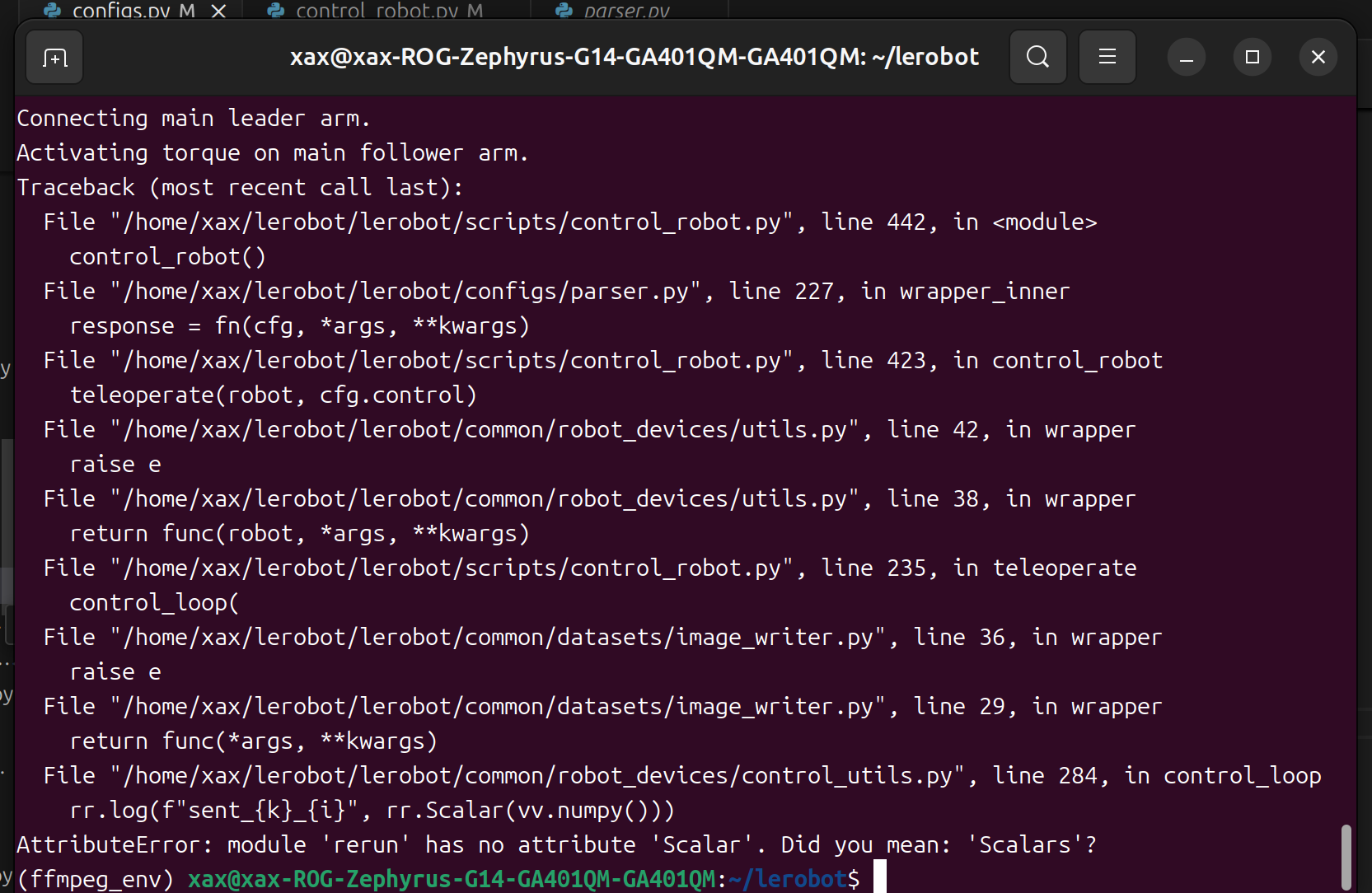
Puedes degradar la versión de rerun para resolver el problema.
pip3 install rerun-sdk==0.23
Grabar el conjunto de datos
Una vez que te familiarices con la teleoperación, puedes grabar tu primer conjunto de datos.
Si quieres usar las funciones del hub de Hugging Face para subir tu conjunto de datos y no lo has hecho anteriormente, asegúrate de haber iniciado sesión usando un token de acceso de escritura, que puede generarse desde la configuración de Hugging Face:
huggingface-cli login --token ${HUGGINGFACE_TOKEN} --add-to-git-credential
Almacena el nombre de tu repositorio de Hugging Face en una variable para ejecutar estos comandos:
HF_USER=$(huggingface-cli whoami | head -n 1)
echo $HF_USER
Graba 10 episodios y sube tu conjunto de datos al hub:
Violin&Viola:
lerobot-record \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true \
--dataset.repo_id=starai/record-test \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=True \
--dataset.single_task="Grab the black cube"
Violin&Cello:
lerobot-record \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true \
--dataset.repo_id=starai/record-test \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=True \
--dataset.single_task="Grab the black cube"
Brazo Dual
Violin&Viola:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_viola_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--display_data=true \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=True \
--dataset.single_task="Grab the black cube"
Violin&Cello:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_cello_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--display_data=true \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=True \
--dataset.single_task="Grab the black cube"
Para diferenciar entre configuraciones de brazo único y brazo dual, el --dataset.repo_id aquí se llama starai/record-test_bi_arm.
Si no quieres usar la función de subida de conjuntos de datos del Hub de Hugging Face, puedes elegir --dataset.push_to_hub=false. Además, reemplaza --dataset.repo_id=${HF_USER}/starai con un nombre de carpeta local personalizado, por ejemplo, --dataset.repo_id=starai/record-test. Los datos se almacenarán en ~/.cache/huggingface/lerobot bajo el directorio home del sistema.
Sin subir al Hub:
Violin&Viola:
lerobot-record \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true \
--dataset.repo_id=starai/record-test \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=False \
--dataset.single_task="Grab the black cube"
Violin&Cello:
lerobot-record \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--teleop.type=lerobot_teleoperator_violin \
--teleop.port=/dev/ttyUSB0 \
--teleop.id=my_awesome_staraiviolin_arm \
--display_data=true \
--dataset.repo_id=starai/record-test \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=False \
--dataset.single_task="Grab the black cube"
Brazo Dual
Violin&Viola:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_viola_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--display_data=true \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=False \
--dataset.single_task="Grab the black cube"
Violin&Cello:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_cello_follower \
--teleop.type=lerobot_teleoperator_bimanual_leader \
--teleop.left_arm_port=/dev/ttyUSB0 \
--teleop.right_arm_port=/dev/ttyUSB2 \
--teleop.id=bi_starai_violin_leader \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--display_data=true \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode_time_s=30 \
--dataset.reset_time_s=30 \
--dataset.num_episodes=10 \
--dataset.push_to_hub=False \
--dataset.single_task="Grab the black cube"
Para diferenciar entre configuraciones de brazo único y brazo dual, el --dataset.repo_id aquí se llama starai/record-test_bi_arm.
recordproporciona un conjunto de herramientas para capturar y gestionar datos durante las operaciones del robot:
1. Almacenamiento de Datos
- Los datos se almacenan en el formato
LeRobotDatasety se guardan en disco durante el proceso de grabación.
2. Puntos de Control y Reanudación
- Los puntos de control se crean automáticamente durante la grabación.
- Si ocurre un problema, puedes reanudar ejecutando el mismo comando con
--resume=true. Al reanudar la grabación, debes establecer--dataset.num_episodesal número adicional de episodios a grabar, ¡no al número total objetivo de episodios en el conjunto de datos! - Para comenzar a grabar desde cero, elimina manualmente el directorio del conjunto de datos.
3. Parámetros de Grabación
Configura el flujo de trabajo de grabación de datos usando parámetros de línea de comandos:
Parameter Description
- warmup-time-s: The initialization time.
- episode-time-s: The duration for each data collection session.
- reset-time-s: The preparation time between each data collection.
- num-episodes: The expected number of data sets to collect.
- push-to-hub: Determines whether to upload the data to HuggingFace Hub.
4. Controles de Teclado Durante la Grabación
Usa atajos de teclado para controlar el flujo de trabajo de grabación de datos:
- Presiona tecla de flecha derecha (→): Detener prematuramente el episodio actual o reiniciar el tiempo, luego pasar al siguiente.
- Presiona tecla de flecha izquierda (←): Cancelar el episodio actual y volver a grabarlo.
- Presiona ESC: Detener inmediatamente la sesión, codificar el video y subir el conjunto de datos.
Si el teclado no funciona, es posible que necesites instalar otra versión de pynput.
pip install pynput==1.6.8
Reproducir un episodio
Ahora intenta reproducir el primer episodio en tu robot:
Viola:
lerobot-replay \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--dataset.repo_id=starai/record-test \
--dataset.episode=1 # choose the episode you want to replay
Cello:
lerobot-replay \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraicello_arm \
--dataset.repo_id=starai/record-test \
--dataset.episode=1 # choose the episode you want to replay
Brazo Dual
Viola:
lerobot-replay \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_viola_follower \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode=0 # choose the episode you want to replay
Cello:
lerobot-replay \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.id=bi_starai_cello_follower \
--dataset.repo_id=starai/record-test_bi_arm \
--dataset.episode=0 # choose the episode you want to replay
Entrenar y Evaluar Política
ACT
Consulta ACT
Entrenar
Viola:
lerobot-train \
--dataset.repo_id=starai/record-test \
--policy.type=act \
--output_dir=outputs/train/act_viola_test \
--job_name=act_viola_test \
--policy.device=cuda \
--wandb.enable=False \
--policy.repo_id=starai/my_policy \
--steps=200000
Cello:
lerobot-train \
--dataset.repo_id=starai/record-test \
--policy.type=act \
--output_dir=outputs/train/act_cello_test \
--job_name=act_cello_test \
--policy.device=cuda \
--wandb.enable=False \
--policy.repo_id=starai/my_policy \
--steps=200000
Brazo Dual
Viola:
lerobot-train \
--dataset.repo_id=starai/record-test_bi_arm \
--policy.type=act \
--output_dir=outputs/train/act_bi_viola_test \
--job_name=act_bi_viola_test \
--policy.device=cuda \
--wandb.enable=False \
--policy.repo_id=starai/my_policy \
--steps=200000
Cello:
lerobot-train \
--dataset.repo_id=starai/record-test_bi_arm \
--policy.type=act \
--output_dir=outputs/train/act_bi_cello_test \
--job_name=act_bi_cello_test \
--policy.device=cuda \
--wandb.enable=False \
--policy.repo_id=starai/my_policy \
--steps=200000
policy.typeadmite entradadiffusion,pi0,pi0fast- Proporcionamos el conjunto de datos como parámetro:
dataset.repo_id=starai/record-test. - Cargaremos la configuración desde
configuration_act.py. Importante: esta política se adaptará automáticamente a los estados del motor del robot, las acciones del motor y el número de cámaras, y se guardará en tu conjunto de datos. - Proporcionamos
wandb.enable=truepara usar Weights and Biases para visualizar gráficos de entrenamiento. Esto es opcional, pero si lo usas, asegúrate de haber iniciado sesión ejecutandowandb login.
Evaluar
Ejecuta el siguiente comando para grabar 10 episodios de evaluación:
Viola:
lerobot-record \
--robot.type=lerobot_robot_viola \
--robot.port=/dev/ttyUSB1 \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--robot.id=my_awesome_staraiviola_arm \
--display_data=false \
--dataset.repo_id=starai/eval_record-test \
--dataset.single_task="Put lego brick into the transparent box" \
--policy.path=outputs/train/act_viola_test/checkpoints/last/pretrained_model
# <- Teleop optional if you want to teleoperate in between episodes \
# --teleop.type=lerobot_teleoperator_violin \
# --teleop.port=/dev/ttyUSB0 \
# --teleop.id=my_awesome_leader_arm \
Cello:
lerobot-record \
--robot.type=lerobot_robot_cello \
--robot.port=/dev/ttyUSB1 \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--robot.id=my_awesome_staraicello_arm \
--display_data=false \
--dataset.repo_id=starai/eval_record-test \
--dataset.single_task="Put lego brick into the transparent box" \
--policy.path=outputs/train/act_viola_test/checkpoints/last/pretrained_model
# <- Teleop optional if you want to teleoperate in between episodes \
# --teleop.type=lerobot_teleoperator_violin \
# --teleop.port=/dev/ttyUSB0 \
# --teleop.id=my_awesome_leader_arm \
Brazo Dual
Viola:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_viola \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video0, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--robot.id=bi_starai_viola_follower \
--display_data=false \
--dataset.repo_id=starai/eval_record-test_bi_arm \
--dataset.single_task="test" \
--policy.path=outputs/train/act_bi_viola_test/checkpoints/last/pretrained_model
Cello:
lerobot-record \
--robot.type=lerobot_robot_bimanual_follower \
--robot.arm_name=starai_cello \
--robot.left_arm_port=/dev/ttyUSB1 \
--robot.right_arm_port=/dev/ttyUSB3 \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video0, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--robot.id=bi_starai_cello_follower \
--display_data=false \
--dataset.repo_id=starai/eval_record-test_bi_arm \
--dataset.single_task="test" \
--policy.path=outputs/train/act_bi_cello_test/checkpoints/last/pretrained_model
Como puedes ver, esto es casi lo mismo que el comando usado previamente para grabar el conjunto de datos de entrenamiento, con algunos cambios:
-
El parámetro
--policy.path, que indica la ruta a tu archivo de pesos de política entrenada (por ejemplo,outputs/train/act_viola_test/checkpoints/last/pretrained_model). Si has subido los pesos de tu modelo al Hub, también puedes usar el repositorio del modelo (por ejemplo,${HF_USER}/starai). -
El nombre del conjunto de datos de evaluación
dataset.repo_idcomienza coneval_. Esta operación grabará videos y datos específicamente para la fase de evaluación, que se guardarán en una carpeta que comience coneval_, comostarai/eval_record-test. -
Si encuentras
File exists: 'home/xxxx/.cache/huggingface/lerobot/xxxxx/starai/eval_xxxx'durante la fase de evaluación, por favor elimina la carpeta que comience coneval_y ejecuta el programa nuevamente. -
Cuando encuentres
mean is infinity. You should either initialize with stats as an argument or use a pretrained model, por favor asegúrate de que las palabras clave comoupyfronten el parámetro--robot.camerassean estrictamente consistentes con las usadas durante la fase de recolección de datos.
SmolVLA
Consulta SmolVLA
pip install -e ".[smolvla]"
Entrenar
lerobot-train \
--policy.path=lerobot/smolvla_base \ # <- Use pretrained fine-tuned model
--dataset.repo_id=${HF_USER}/mydataset \
--batch_size=64 \
--steps=20000 \
--output_dir=outputs/train/my_smolvla \
--job_name=my_smolvla_training \
--policy.device=cuda \
--wandb.enable=true
Evaluar
lerobot-record \
--robot.type=starai_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video2, width: 1280, height: 720, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video4, width: 1280, height: 720, fps: 30, fourcc: "MJPG"}}" \
--dataset.single_task="Grasp a lego block and put it in the bin." \ # <- Use the same task description you used in your dataset recording
--dataset.repo_id=${HF_USER}/eval_DATASET_NAME_test \
--dataset.episode_time_s=50 \
--dataset.num_episodes=10 \
# <- Teleop optional if you want to teleoperate in between episodes \
# --teleop.type=so100_leader \
# --teleop.port=/dev/ttyACM0 \
# --teleop.id=my_red_leader_arm \
--policy.path=HF_USER/FINETUNE_MODEL_NAME # <- Use your fine-tuned model
Libero
Consulta Libero
LIBERO es un benchmark diseñado para estudiar el aprendizaje robótico de por vida. La idea es que los robots no solo serán preentrenados una vez en una fábrica, sino que necesitarán seguir aprendiendo y adaptándose con sus usuarios humanos a lo largo del tiempo. Esta adaptación continua se llama aprendizaje de por vida en la toma de decisiones (LLDM), y es un paso clave hacia la construcción de robots que se conviertan en verdaderos asistentes personalizados.
LIBERO incluye cinco suites de tareas:
-
LIBERO-Spatial (libero_spatial) – tareas que requieren razonamiento sobre relaciones espaciales.
-
LIBERO-Object (libero_object) – tareas centradas en manipular diferentes objetos.
-
LIBERO-Goal (libero_goal) – tareas condicionadas por objetivos donde el robot debe adaptarse a objetivos cambiantes.
-
LIBERO-90 (libero_90) – 90 tareas de horizonte corto de la colección LIBERO-100.
-
LIBERO-Long (libero_10) – 10 tareas de horizonte largo de la colección LIBERO-100.
En conjunto, estas suites cubren 130 tareas, que van desde manipulaciones simples de objetos hasta escenarios complejos de múltiples pasos. LIBERO está destinado a crecer con el tiempo y servir como un benchmark compartido donde la comunidad puede probar y mejorar algoritmos de aprendizaje permanente.
Entrenar
lerobot-train \
--policy.type=smolvla \
--policy.repo_id=${HF_USER}/libero-test \
--dataset.repo_id=HuggingFaceVLA/libero \
--env.type=libero \
--env.task=libero_10 \
--output_dir=./outputs/ \
--steps=100000 \
--batch_size=4 \
--eval.batch_size=1 \
--eval.n_episodes=1 \
--eval_freq=1000 \
Evaluando
Para instalar LIBERO, después de seguir las instrucciones oficiales de LeRobot, simplemente haz: pip install -e ".[libero]"
Evaluación de suite única
lerobot-eval \
--policy.path="your-policy-id" \
--env.type=libero \
--env.task=libero_object \
--eval.batch_size=2 \
--eval.n_episodes=3
-
--env.taskselecciona la suite (libero_object, libero_spatial, etc.). -
--eval.batch_sizecontrola cuántos entornos se ejecutan en paralelo. -
--eval.n_episodesestablece cuántos episodios ejecutar en total.
Evaluación multi-suite
lerobot-eval \
--policy.path="your-policy-id" \
--env.type=libero \
--env.task=libero_object,libero_spatial \
--eval.batch_size=1 \
--eval.n_episodes=2
- Pasa una lista separada por comas a
--env.taskpara evaluación multi-suite.
Pi0
Consulta Pi0
pip install -e ".[pi]"
Entrenar
lerobot-train \
--policy.type=pi0 \
--dataset.repo_id=seeed/eval_test123 \
--job_name=pi0_training \
--output_dir=outputs/pi0_training \
--policy.pretrained_path=lerobot/pi0_base \
--policy.compile_model=true \
--policy.gradient_checkpointing=true \
--policy.dtype=bfloat16 \
--steps=20000 \
--policy.device=cuda \
--batch_size=32 \
--wandb.enable=false
Evaluar
lerobot-record \
--robot.type=starai_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video0, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--dataset.single_task="Grasp a lego block and put it in the bin." \ # <- Use the same task description you used in your dataset recording
--robot.id=my_awesome_staraiviola_arm \
--display_data=false \
--dataset.repo_id=seeed/eval_test123 \
--policy.path=outputs/pi0_training/checkpoints/last/pretrained_model
Pi0.5
Consulta Pi0.5
pip install -e ".[pi]"
Entrenar
lerobot-train \
--dataset.repo_id=seeed/eval_test123 \
--policy.type=pi05 \
--output_dir=outputs/pi05_training \
--job_name=pi05_training \
--policy.pretrained_path=lerobot/pi05_base \
--policy.compile_model=true \
--policy.gradient_checkpointing=true \
--wandb.enable=false \
--policy.dtype=bfloat16 \
--steps=3000 \
--policy.device=cuda \
--batch_size=32
Evaluar
lerobot-record \
--robot.type=starai_viola \
--robot.port=/dev/ttyUSB1 \
--robot.id=my_awesome_staraiviola_arm \
--robot.cameras="{ up: {type: opencv, index_or_path: /dev/video0, width: 640, height: 480, fps: 30, fourcc: "MJPG"},front: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30, fourcc: "MJPG"}}" \
--dataset.single_task="Grasp a lego block and put it in the bin." \ # <- Use the same task description you used in your dataset recording
--robot.id=my_awesome_staraiviola_arm \
--display_data=false \
--dataset.repo_id=seeed/eval_test123 \
--policy.path=outputs/pi05_training/checkpoints/last/pretrained_model
GR00T N1.5
Consulta GR00T N1.5
Reanudar el entrenamiento desde un checkpoint específico.
Viola:
lerobot-train \
--config_path=outputs/train/act_viola_test/checkpoints/last/pretrained_model/train_config.json \
--resume=true \
--steps=400000
Cello:
lerobot-train \
--config_path=outputs/train/act_cello_test/checkpoints/last/pretrained_model/train_config.json \
--resume=true \
--steps=400000
FAQ
-
Si estás usando el tutorial en este documento, por favor
git cloneel repositorio de GitHub recomendado:https://github.com/servodevelop/lerobot.git. -
Si la teleoperación funciona normalmente pero la teleoperación con una cámara no muestra la interfaz de imagen, por favor consulta aquí.
-
Si encuentras un problema con libtiff durante la teleoperación del dataset, por favor actualiza la versión de libtiff.
conda install libtiff==4.5.0 # for Ubuntu 22.04, use libtiff==4.5.1 -
Después de instalar LeRobot, puede desinstalar automáticamente la versión GPU de PyTorch, por lo que necesitas instalar manualmente torch-gpu.
-
Para Jetson, por favor instala primero PyTorch y Torchvision antes de ejecutar
conda install -y -c conda-forge ffmpeg, de lo contrario, habrá un problema de incompatibilidad de versiones al compilar torchvision. -
Entrenar 50 episodios de datos ACT en una laptop 3060 8GB toma aproximadamente 6 horas, mientras que entrenar 50 episodios en una computadora 4090 o A100 toma alrededor de 2-3 horas.
-
Durante la recolección de datos, asegura la estabilidad de la posición y ángulo de la cámara, así como la iluminación ambiental, y minimiza el fondo inestable y los peatones capturados por la cámara. De lo contrario, cambios significativos en el entorno de despliegue pueden causar que el brazo robótico falle al agarrar objetos normalmente.
-
El
num-episodesen el comando de recolección de datos debe asegurar suficiente recolección de datos y no debe pausarse manualmente a la mitad. Esto es porque la media y varianza de los datos se calculan solo después de que se completa la recolección de datos, lo cual es necesario para el entrenamiento. -
Si el programa indica que no puede leer los datos de imagen de la cámara USB, por favor asegúrate de que la cámara USB no esté conectada a través de un Hub. La cámara USB debe estar conectada directamente al dispositivo para asegurar velocidades rápidas de transmisión de imagen.
Citas
StarAI Robot Arm ROS2 Moveit2: star-arm-moveit2
lerobot-starai github: lerobot-starai
STEP: STEP
URDF: URDF
Proyecto Huggingface: Lerobot
ACT o ALOHA: Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
VQ-BeT: VQ-BeT: Behavior Generation with Latent Actions
Diffusion Policy: Diffusion Policy
TD-MPC: TD-MPC
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarte diferentes tipos de soporte para asegurar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para satisfacer diferentes preferencias y necesidades.