Tutorial práctico del código fuente del firmware de Meshtastic
Este tutorial está pensado para usuarios que acaban de empezar con el código fuente del firmware de Meshtastic. Incluye flujos de trabajo habituales tanto para Windows como para macOS. El objetivo es sencillo: clonar el repositorio oficial, completar una compilación correcta, hacer un cambio sencillo en la interfaz de usuario y grabar el firmware modificado en el dispositivo para su verificación.
Si ya estás familiarizado con Git, Python o PlatformIO, puedes omitir las secciones correspondientes e ir directamente a la parte práctica.
Esta guía incluye comandos habituales tanto para Windows como para macOS. La mayoría de las capturas de pantalla siguen tomadas en un entorno Windows, pero el flujo de trabajo general en macOS es muy similar.
Requisitos previos
Antes de comenzar, prepara las siguientes herramientas:
- Git
- Python 3
- VS Code
- PlatformIO
1. Instalar Git
- Windows
- macOS
Abre la página oficial de descarga de Git para Windows:
El instalador normalmente comienza a descargarse automáticamente cuando abres la página. Una vez finalizada la descarga, haz doble clic en el instalador y sigue el asistente de instalación.
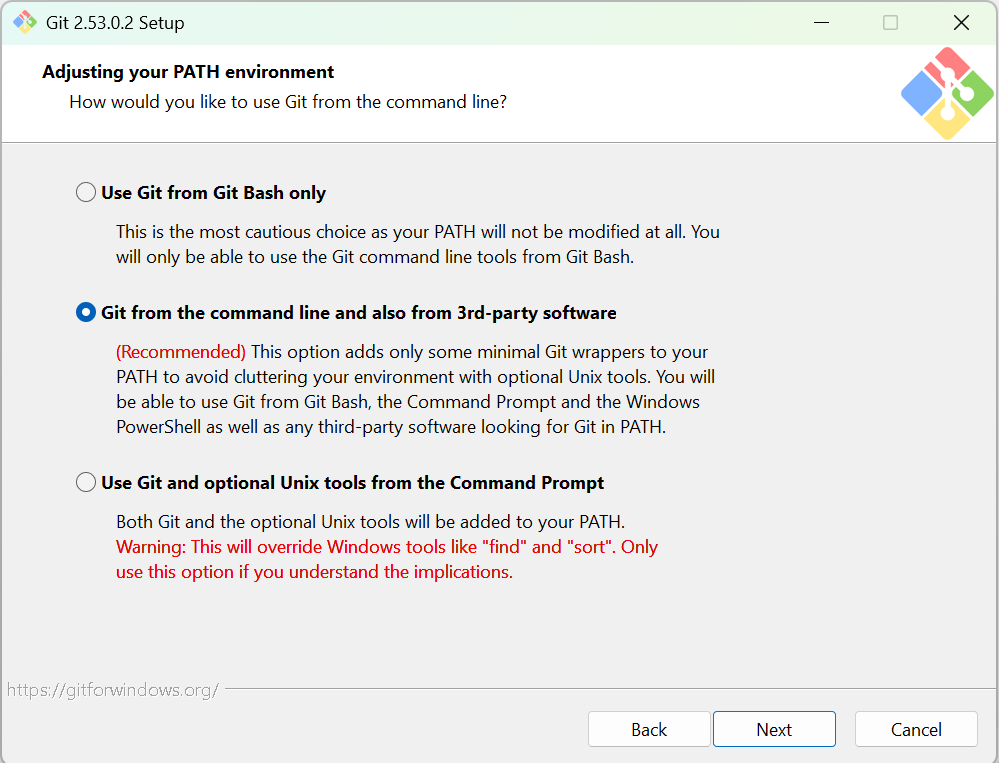
Durante la instalación, el paso más importante es ajustar tu variable de entorno PATH. Elige:
Git from the command line and also from 3rd-party software
Para las demás opciones, los valores predeterminados suelen ser suficientes. Simplemente sigue haciendo clic en Next.
Espera hasta que finalice la instalación.
Después de la instalación, cierra todas las ventanas actuales de PowerShell y de terminal de VS Code, luego abre una nueva ventana de PowerShell y ejecuta:
& "C:\Program Files\Git\cmd\git.exe" --version

Si se muestra un número de versión de Git, Git se ha instalado correctamente.
Si el comando git sigue sin estar disponible
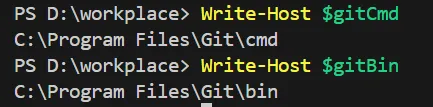
Primero puedes ejecutar los siguientes comandos en PowerShell para confirmar las rutas de instalación predeterminadas de Git:
$gitCmd = "C:\Program Files\Git\cmd"
$gitBin = "C:\Program Files\Git\bin"
Write-Host $gitCmd
Write-Host $gitBin
Luego añade Git manualmente a las variables de entorno del sistema.
Pasos de corrección mediante GUI
- Pulsa
Win - Busca "Edit the system environment variables"
- Ábrelo y haz clic en Environment Variables
- Busca
Pathen System variables - Haz clic en Edit
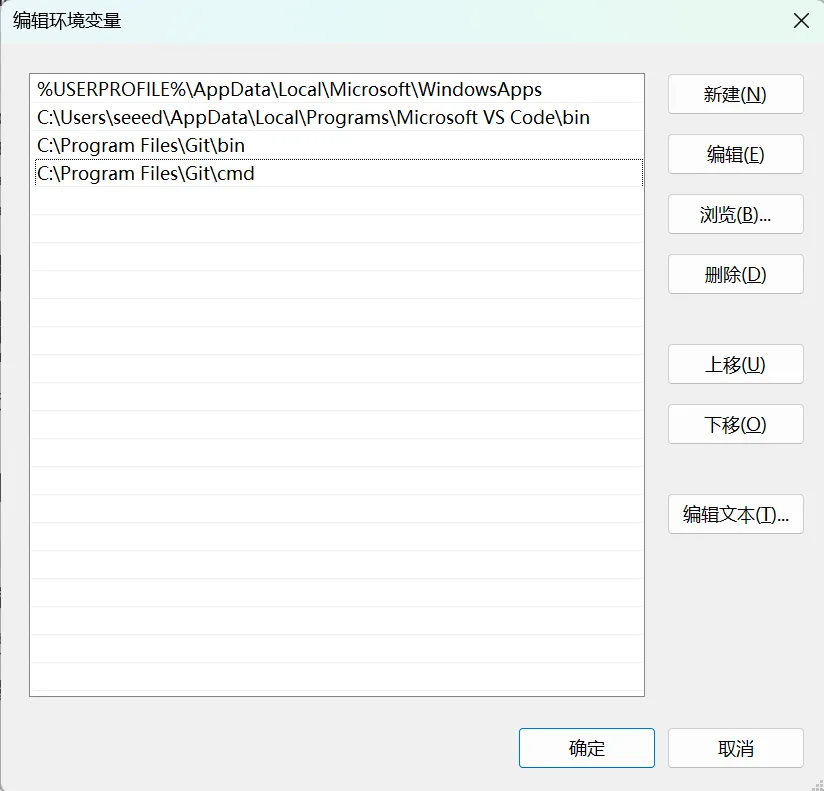
- Haz clic en New y añade las dos rutas siguientes:
C:\Program Files\Git\cmd
C:\Program Files\Git\bin
- Haz clic en OK en todas las ventanas para guardar
Después de guardar, aún necesitas:
- Cerrar todas las ventanas de PowerShell
- Abrir PowerShell de nuevo
Luego ejecuta:
git --version
Si aparece un número de versión, la instalación está completa.
En macOS, Git se puede instalar de más de una manera, pero usar Homebrew suele ser la opción más sencilla:
- Instala primero las Command Line Tools:
xcode-select --install
- Si Homebrew aún no está instalado, instálalo primero:
/bin/bash -c "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/HEAD/install.sh)"
- Instala Git:
brew install git
- Comprueba la versión instalada:
git --version
Si tu terminal ya devuelve una versión válida de Git, no necesitas volver a instalarlo.
Configura tu identidad de Git
A continuación, configura tu información de usuario de Git. Sustituye los valores de ejemplo por tu propio nombre y dirección de correo electrónico:
git config --global user.name "your name"
git config --global user.email "your [email protected]"
Luego ejecuta:
git config --global --list
para confirmar que la configuración ha tenido efecto.
2. Instalar Python 3
Instalar Python desde la línea de comandos
- Windows
- macOS
Ejecuta los siguientes comandos en la terminal:
winget search --id Python.Python.3.13 --source winget
winget install -e --id Python.Python.3.13 --source winget
Si el primer comando puede encontrar Python, el segundo normalmente debería instalarlo directamente.
Después de la instalación, cierra la terminal y ábrela de nuevo, luego ejecuta:
python --version
pip --version

Si se muestran números de versión, Python y pip están listos para usarse.
macOS a menudo ya incluye un entorno Python. Antes de instalar una nueva versión, comprueba si python3 y pip3 ya están disponibles:
python3 --version
pip3 --version
Si no están disponibles, o si quieres una versión más reciente, instala Python con Homebrew:
brew install python
Después de la instalación, vuelve a abrir la terminal y ejecuta:
python3 --version
pip3 --version
Si prefieres usar python y pip, puedes configurar alias de shell por tu cuenta. Sin embargo, en macOS, usar python3 y pip3 suele ser la opción más fiable.
3. Instalar PlatformIO
Este paso puede resultar menos amigable para principiantes porque PlatformIO descarga muchas dependencias automáticamente y la instalación puede llevar algo de tiempo. Si aparecen errores durante la instalación, normalmente es mejor esperar con paciencia y solucionar los problemas uno por uno. Usar herramientas de IA para ayudar a inspeccionar los mensajes de error también puede ahorrar tiempo.
Busca PlatformIO en el marketplace de extensiones de VS Code e instálalo.
Después de la instalación, normalmente aparece un icono con forma de hormiga en la barra de herramientas izquierda.
4. Clonar el repositorio del firmware de Meshtastic
El repositorio oficial del firmware de Meshtastic es meshtastic/firmware.
- Windows
- macOS
Ejecuta los siguientes comandos en la terminal de tu directorio de trabajo:
git clone https://github.com/meshtastic/firmware.git
cd firmware
git submodule update --init
Si tu directorio de proyecto está en otra unidad o bajo otra ruta, cambia primero a esa ubicación.


Si la salida se ve similar a las capturas de pantalla anteriores, el repositorio se ha clonado correctamente.
Ejecuta los siguientes comandos en la terminal de tu directorio de trabajo:
cd ~/workplace
git clone https://github.com/meshtastic/firmware.git
cd firmware
git submodule update --init
Si ~/workplace aún no existe, créalo primero:
mkdir -p ~/workplace
Si los comandos se completan con normalidad, el repositorio se ha clonado correctamente.
Una vez que el repositorio esté listo, puedes continuar con cualquiera de los dos proyectos prácticos siguientes. El Proyecto A se centra en la personalización de la interfaz de usuario de Wio Tracker L1. El Proyecto B se centra en la telemetría ambiental con XIAO ESP32S3 sobre Meshtastic.
Proyecto A: personalización de la interfaz de usuario de Wio Tracker L1
Práctica guiada
En esta etapa, no te apresures a editar el código. Primero, asegúrate de que el proyecto pueda ejecutar correctamente todo el proceso de compilación.
Se recomienda comenzar con tres tareas:
- Abrir
firmware - Comprobar
platformio.ini - Encontrar el entorno de compilación para tu placa de destino
Un detalle importante: no te centres solo en el platformio.ini de la raíz. En realidad incluye archivos de configuración adicionales, por ejemplo:
extra_configs =
variants/*/*.ini
variants/*/*/platformio.ini
variants/*/diy/*/platformio.ini
Eso significa que las definiciones reales de los entornos a nivel de placa suelen estar ubicadas bajo variants/.../platformio.ini.
Al identificar la placa de destino, presta especial atención a estos dos directorios:
variants/boards/
Aquí usamos Wio Tracker L1 Pro como ejemplo de destino.
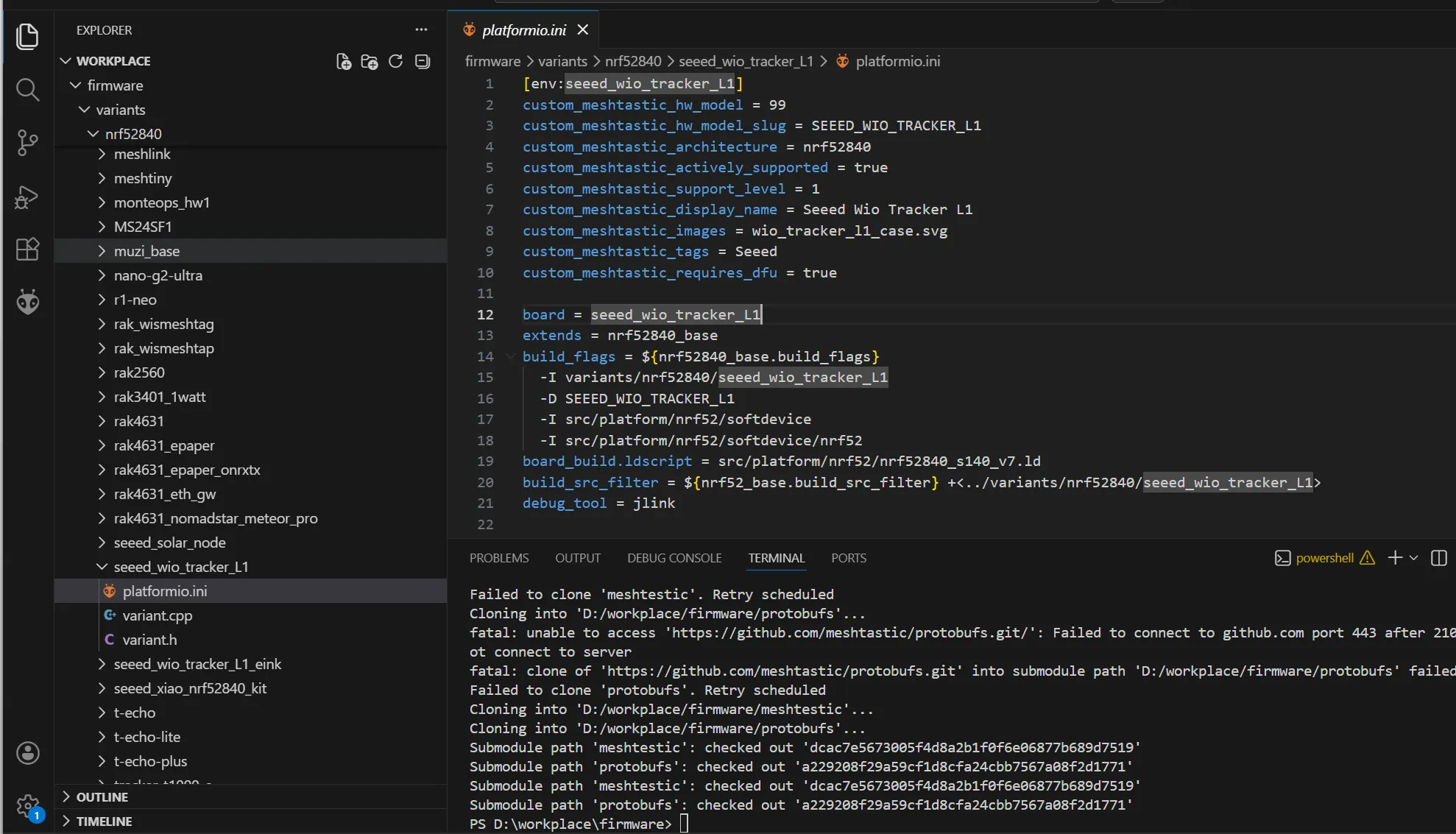
Esto muestra que, en Meshtastic, el objetivo de compilación para Wio Tracker L1 / L1 Pro es seeed_wio_tracker_L1.
Resumen de la modificación mínima
Si solo quieres completar una práctica mínima de extremo a extremo, céntrate en estos pasos clave:
- Instalar Git, Python 3, VS Code y PlatformIO.
- Clonar el repositorio
meshtastic/firmwaree inicializar los submódulos. - Usar
pio run -e seeed_wio_tracker_L1para confirmar que el proyecto original se compila correctamente. - Modificar la lógica de visualización en
src/graphics/SharedUIDisplay.cpp. - Volver a compilar el firmware y grabar el archivo UF2 generado en el dispositivo para su verificación.
Paso 1: confirmar que el proyecto se compila correctamente
Aquí usamos la CLI de PlatformIO Core para compilar.
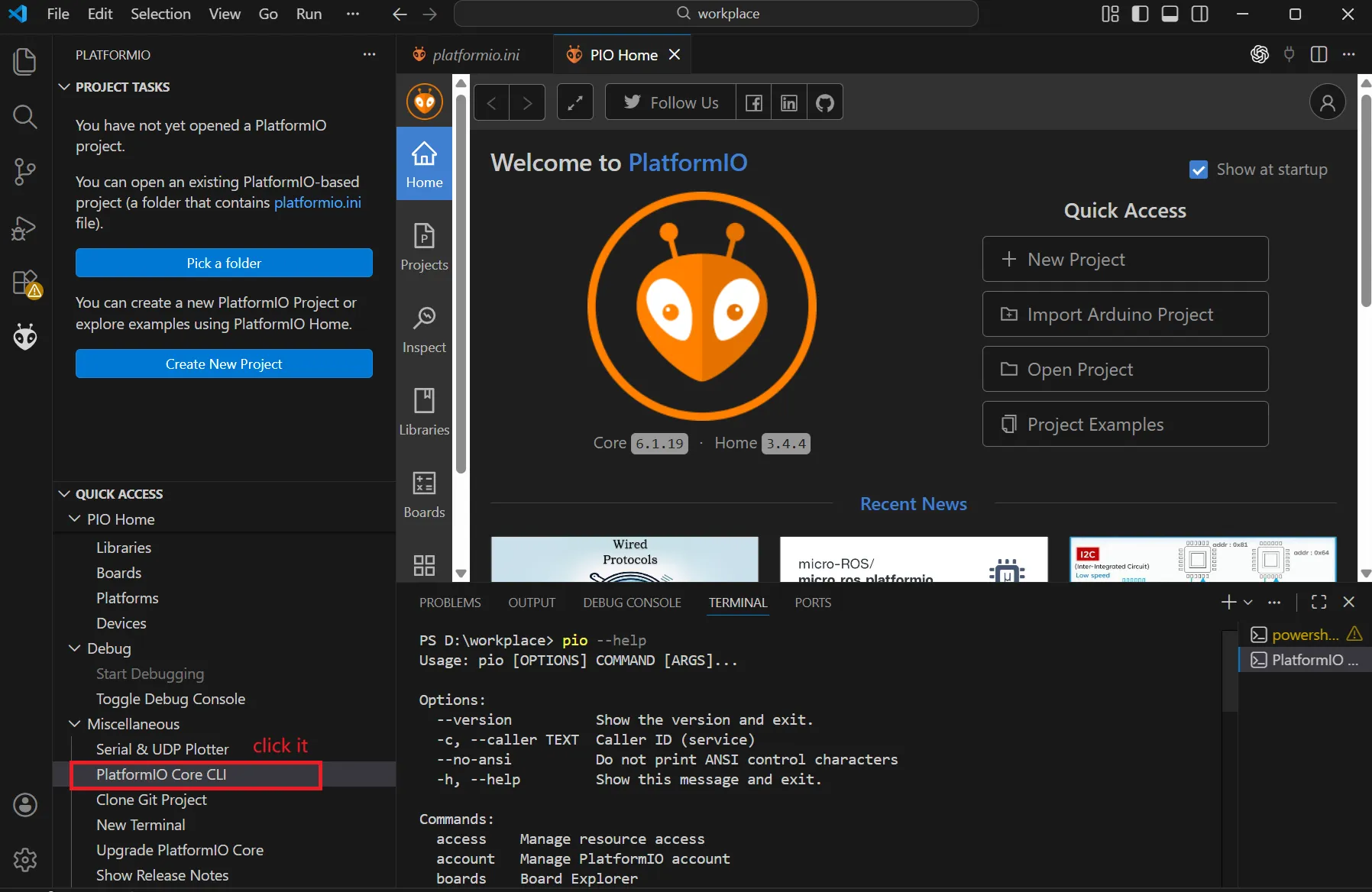
Para la primera compilación, se recomienda ejecutar el siguiente comando:
- Windows
- macOS
cd D:\workplace\firmware # Adjust to your actual project path
pio run -e seeed_wio_tracker_L1
cd ~/workplace/firmware # Adjust to your actual project path
pio run -e seeed_wio_tracker_L1

Si la interfaz se ve similar a la captura de pantalla anterior, el proceso de compilación se ha iniciado correctamente. La primera compilación suele tardar un tiempo, así que ten paciencia.
Si la compilación falla
Cuando una compilación falla, primero puedes pedir a PlatformIO que instale las dependencias requeridas por el entorno actual:
- Windows
- macOS
cd D:\workplace\firmware # Adjust to your actual project path
pio pkg install -e seeed_wio_tracker_L1
cd ~/workplace/firmware # Adjust to your actual project path
pio pkg install -e seeed_wio_tracker_L1
Este enfoque tiene varias ventajas:
- Solo instala las dependencias, sin iniciar inmediatamente una compilación completa.
- Facilita ver qué paquete está causando el problema.
- Los mensajes de error suelen estar más enfocados y son más fáciles de depurar.
Después de que se instalen las dependencias, ejecuta:
- Windows
- macOS
pio run -e seeed_wio_tracker_L1 -v
pio run -e seeed_wio_tracker_L1 -v
Una vez que se complete la instalación de dependencias, ejecuta de nuevo la compilación normal:
- Windows
- macOS
pio run -e seeed_wio_tracker_L1
pio run -e seeed_wio_tracker_L1
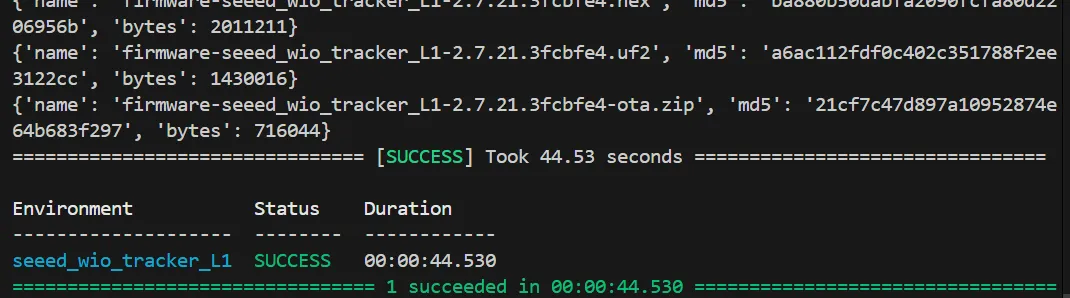
Si la compilación pasa en este punto, la salida de tu firmware se ha generado correctamente.
Paso 2: Modificar el código
Práctica 1: Modificar la visualización de la interfaz de usuario (UI)
Comienza rastreando la implementación de la pantalla desde la configuración a nivel de placa. Primero puedes comprobar:
variants/nrf52840/seeed_wio_tracker_L1/platformio.inivariants/nrf52840/seeed_wio_tracker_L1/variant.h
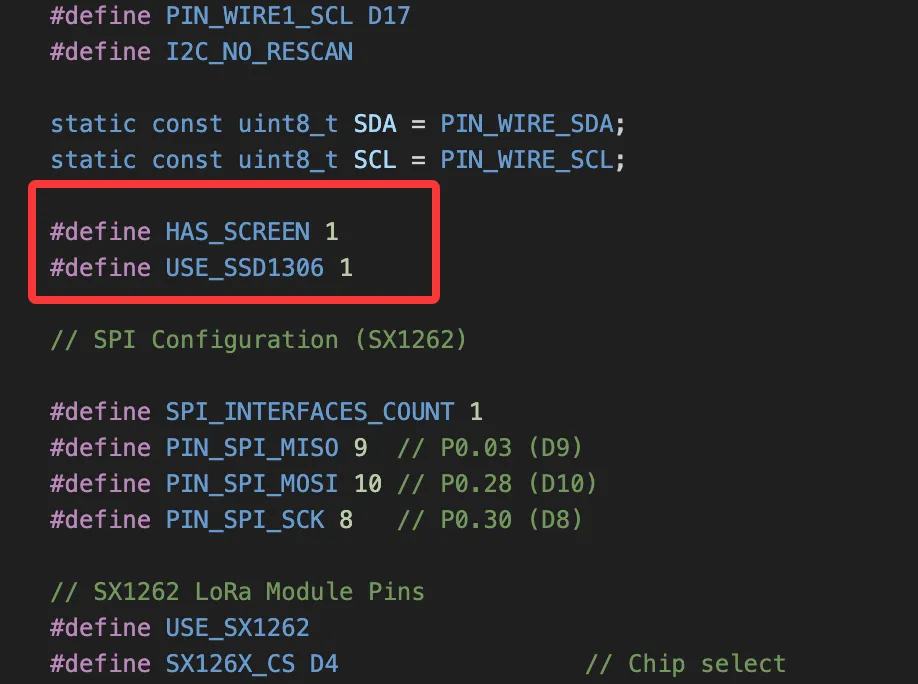
A partir de estos archivos de configuración, puedes ver que L1 define HAS_SCREEN y USE_SSD1306. Eso significa que utiliza la canalización estándar de pantalla OLED, no una configuración sin pantalla y no una solución de tinta electrónica (E-Ink).
Si sigues rastreando la lógica de visualización, la mayor parte del código relacionado se encuentra en:
src/graphics/src/graphics/draw/
La forma exacta en que lo modifiques depende de tu capacidad para leer el código fuente. Aquí empezamos con un ejemplo muy sencillo: modificar la interfaz de inicio.
Cambio 1: Registrar el borde derecho del texto de la batería
Before / After
// Before
int batteryX = 1;
int batteryY = HEADER_OFFSET_Y + 1;
// After
int batteryX = 1;
int batteryY = HEADER_OFFSET_Y + 1;
int batteryTextEndX = batteryX - 1;
src/graphics/SharedUIDisplay.cpp:157
Esto añade batteryTextEndX, que registra la posición final del texto del porcentaje de batería. Eso facilita añadir texto personalizado después de la información de la batería más adelante.
Cambio 2: Calcular el límite derecho mientras se dibuja el porcentaje de batería
// Before
if (chargePercent != 101) {
char chargeStr[4];
snprintf(chargeStr, sizeof(chargeStr), "%d", chargePercent);
int chargeNumWidth = display->getStringWidth(chargeStr);
display->drawString(batteryX, textY, chargeStr);
display->drawString(batteryX + chargeNumWidth - 1, textY, "%");
if (isBold) {
display->drawString(batteryX + 1, textY, chargeStr);
display->drawString(batteryX + chargeNumWidth, textY, "%");
}
}
// After
if (chargePercent != 101) {
char chargeStr[4];
snprintf(chargeStr, sizeof(chargeStr), "%d", chargePercent);
int chargeNumWidth = display->getStringWidth(chargeStr);
int percentWidth = display->getStringWidth("%");
display->drawString(batteryX, textY, chargeStr);
display->drawString(batteryX + chargeNumWidth - 1, textY, "%");
if (isBold) {
display->drawString(batteryX + 1, textY, chargeStr);
display->drawString(batteryX + chargeNumWidth, textY, "%");
}
batteryTextEndX = batteryX + chargeNumWidth + percentWidth - 1 + (isBold ? 1 : 0);
} else {
batteryTextEndX = batteryX - 1;
}
src/graphics/SharedUIDisplay.cpp:204
Este código se encuentra dentro de la lógica de dibujo del porcentaje de batería. Además de mostrar el nivel de batería con normalidad, también calcula el límite derecho del área de texto para que se puedan colocar etiquetas personalizadas después de la información de la batería.
Cambio 3: Reservar un límite para el área de iconos de la derecha
// Before
int iconRightEdge = timeX - 2;
// After
int iconRightEdge = timeX - 2;
int headerLabelRight = timeX - 4;
src/graphics/SharedUIDisplay.cpp:263
Esta parte gestiona el área utilizada por la hora, correo, silencio y otros iconos en el lado derecho. Añadí headerLabelRight para limitar el límite máximo derecho del texto central y evitar la superposición con el contenido del lado derecho.
Cambio 4: Dibujar una etiqueta personalizada cuando el título está vacío
// Newly added core logic
#if defined(SEEED_WIO_TRACKER_L1) && !defined(SEEED_WIO_TRACKER_L1_EINK)
if (titleStr && titleStr[0] == '\0') {
static const char *yclLabel = "made by AE";
int labelWidth = display->getStringWidth(yclLabel);
int labelLeft = batteryTextEndX + 4;
if (labelLeft + labelWidth <= headerLabelRight) {
int labelX = labelLeft + ((headerLabelRight - labelLeft) - labelWidth) / 2;
display->drawString(labelX, textY, yclLabel);
if (isBold)
display->drawString(labelX + 1, textY, yclLabel);
}
}
#endif
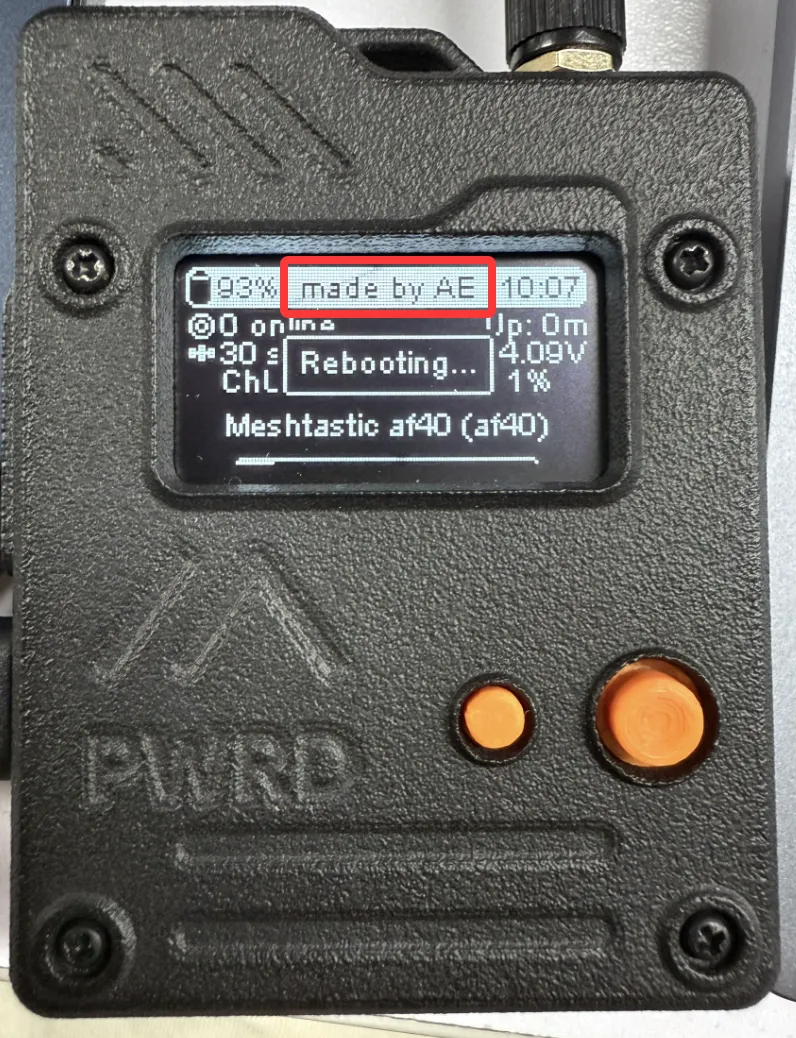
src/graphics/SharedUIDisplay.cpp:350
Esta es la lógica central de la modificación. Solo se aplica a SEEED_WIO_TRACKER_L1 y excluye explícitamente la variante de tinta electrónica (E-Ink). Centra el texto made by AE en el espacio en blanco entre la información de la batería y la visualización de la hora.
Cambio 5: Gestionar la rama en la que no se muestra la hora
// Add the same boundary control for the no-time branch
int iconRightEdge = screenW - xOffset;
int headerLabelRight = screenW - xOffset - 2;
src/graphics/SharedUIDisplay.cpp:377
Esta es la rama que se utiliza cuando no se muestra ningún valor de hora. Es necesario añadir aquí el mismo control de límites.
#if defined(SEEED_WIO_TRACKER_L1) && !defined(SEEED_WIO_TRACKER_L1_EINK)
if (titleStr && titleStr[0] == '\0') {
static const char *yclLabel = "made by AE";
int labelWidth = display->getStringWidth(yclLabel);
int labelLeft = batteryTextEndX + 4;
if (labelLeft + labelWidth <= headerLabelRight) {
int labelX = labelLeft + ((headerLabelRight - labelLeft) - labelWidth) / 2;
display->drawString(labelX, textY, yclLabel);
if (isBold)
display->drawString(labelX + 1, textY, yclLabel);
}
}
#endif
src/graphics/SharedUIDisplay.cpp:426
Esta es la implementación para dibujar made by AE en la rama sin hora.
Puedes encontrar el código completo aquí:
Paso 3: Compila tu propio firmware
Después de terminar la modificación, vuelve a la raíz del proyecto y compila de nuevo el mismo objetivo:
- Windows
- macOS
cd D:\workplace\firmware # Adjust to your actual project path
pio run -e seeed_wio_tracker_L1
cd ~/workplace/firmware # Adjust to your actual project path
pio run -e seeed_wio_tracker_L1
La lógica de visualización ha cambiado, pero el objetivo de compilación sigue siendo el mismo:
seeed_wio_tracker_L1
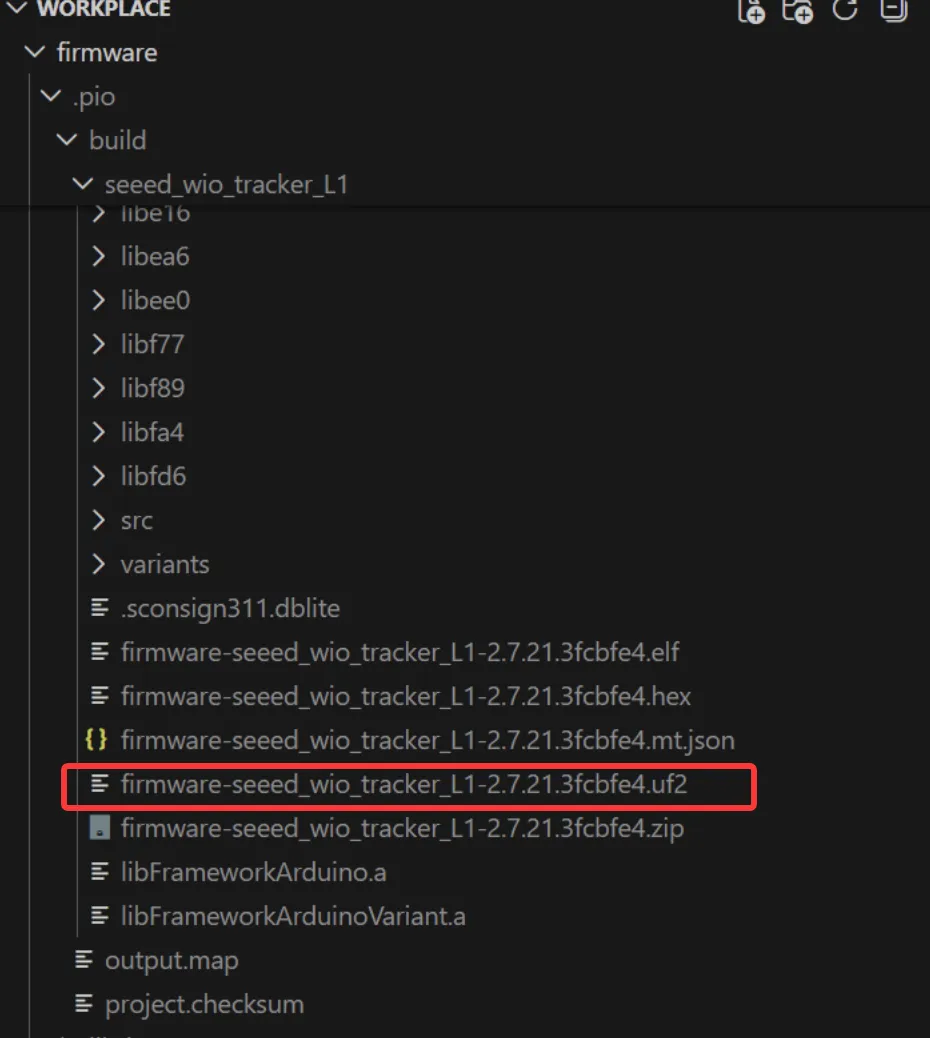
Después de una compilación exitosa, la salida suele ubicarse en:
- Windows
- macOS
D:\workplace\firmware\.pio\build\seeed_wio_tracker_L1\
~/workplace/firmware/.pio/build/seeed_wio_tracker_L1/
El archivo que debes confirmar que se ha actualizado es:
firmware-seeed_wio_tracker_L1-*.uf2
Flashear el firmware
Una vez que la compilación haya finalizado, abre la página oficial de flasheo:
En la mayoría de los casos, primero deberías realizar una operación de borrado.
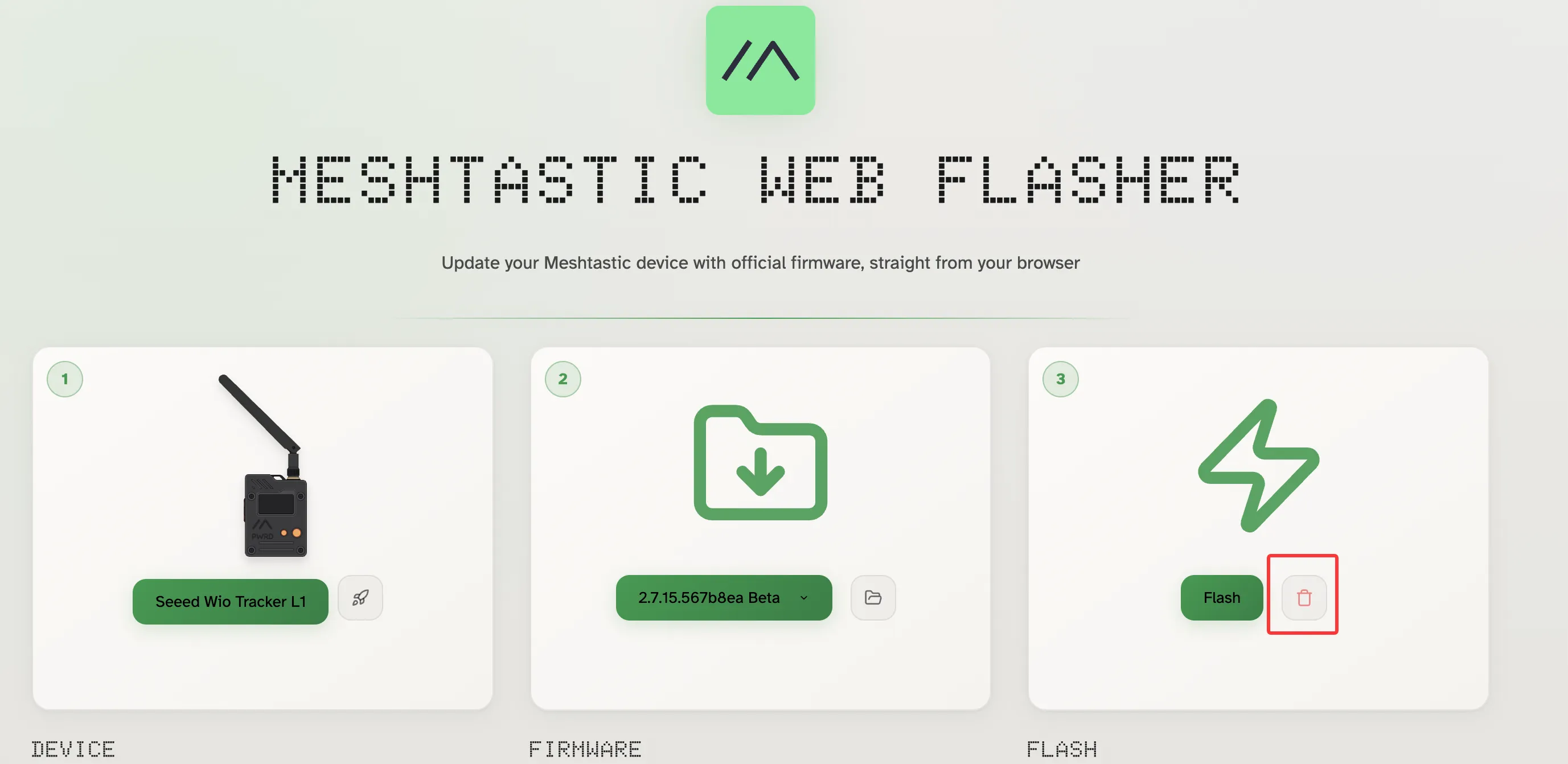
Luego selecciona el archivo de firmware que acabas de compilar y flashea el dispositivo.

En este punto, el ejercicio práctico del código fuente de Meshtastic está completo. Has pasado por todo el flujo de trabajo: configuración del entorno, clonación del repositorio, descubrimiento de la configuración de la placa, compilación del firmware, modificación de la lógica de visualización y verificación final del flasheo.
Si quieres ir más allá, puedes seguir explorando estas direcciones:
- Modificar más elementos en la pantalla de inicio
- Ajustar el comportamiento de botones, GPS, Bluetooth y otros módulos
- Añadir un
variantindependiente para tu propia placa - Seguir rastreando las relaciones entre
src/,variants/yboards/
Si quieres un ejemplo a nivel de código fuente más orientado a funcionalidades, continúa con el Proyecto B a continuación. Construye un nodo dedicado de telemetría ambiental con XIAO ESP32S3 + Wio-SX1262 + SHT40. En comparación con la modificación de la interfaz de Wio Tracker L1 anterior, esta parte se centra en la configuración predeterminada, el temporizado de telemetría y la verificación real de la malla entre dos nodos.
Proyecto B: nodo de telemetría ambiental con XIAO ESP32S3
Objetivo del proyecto
Este ejemplo avanzado utiliza dos dispositivos Meshtastic en la misma malla.
Nodo sensor remoto
- Leer temperatura y humedad desde
SHT40 - Usar telemetría ambiental de Meshtastic
- Enviar telemetría a la malla
- Cambiar el intervalo de envío en la malla a
60s - Omitir la configuración interactiva de región en el primer arranque
- Establecer la región predeterminada en
US
Nodo pasarela cercano
- Unirse a la red Meshtastic como
CLIENT - Recibir paquetes remotos
TELEMETRY_APPpor LoRa - Analizar
environmentMetrics.temperature - Analizar
environmentMetrics.relativeHumidity
Ruta de comunicación
XIAO ESP32S3 + Wio-SX1262 + SHT40 -> Meshtastic LoRa -> XIAO ESP32S3 + Wio-SX1262 (or any other device on the same mesh)
Preparación de hardware
Hardware del nodo remoto
- Seeed
XIAO ESP32S3 Wio-SX1262SHT40
Hardware del nodo pasarela
El nodo cercano puede ser cualquier dispositivo Meshtastic que se una a la misma red. En los ejemplos siguientes, sigo usando otro dispositivo XIAO ESP32S3 + Wio-SX1262.
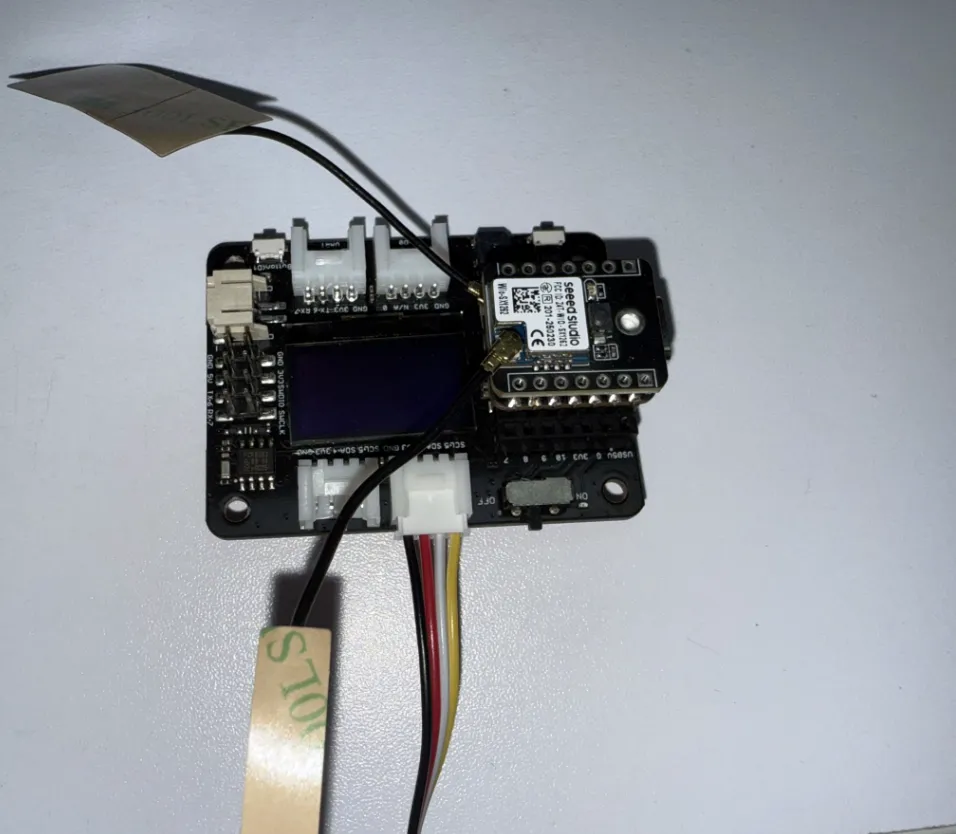
Cableado del SHT40
VCC -> 3V3GND -> GNDSDA -> GPIO5SCL -> GPIO6
Ajustes confirmados que funcionan:
I2C address = 0x44GPIO5 / GPIO6es el par de cableado I2C que funciona actualmente
La siguiente foto muestra el cableado real utilizado en el nodo remoto:
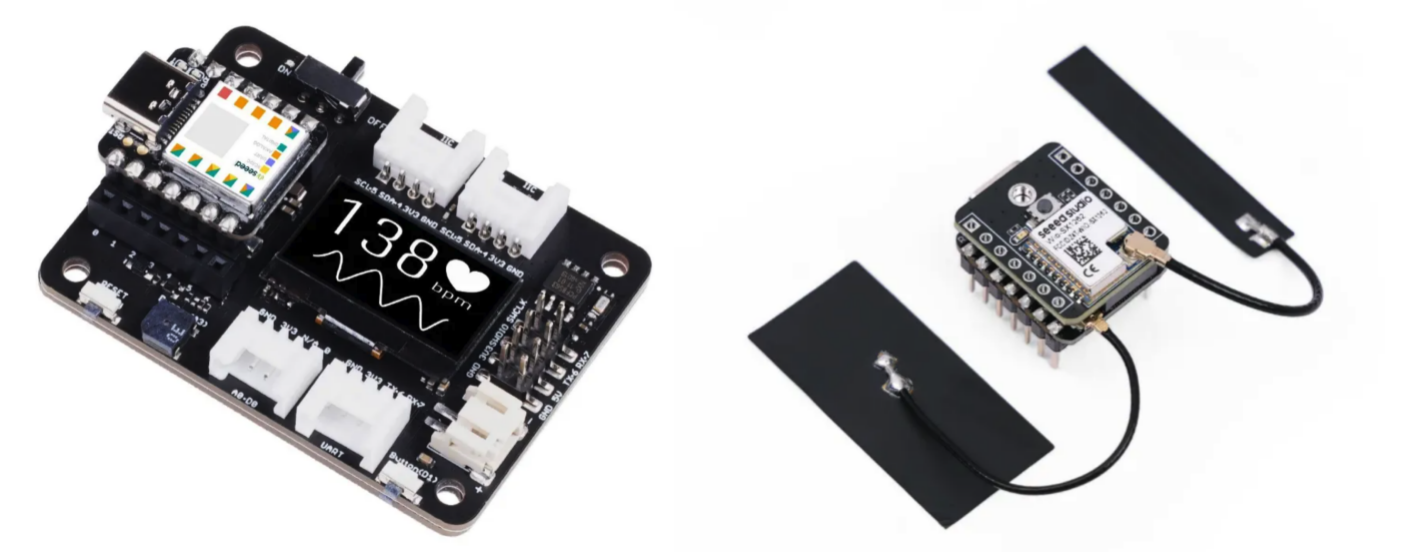
Módulos y SKU utilizados en este proyecto
Seeeduino XIAO Expansion Board(SKU: 103030356)XIAO ESP32S3 & Wio-SX1262 Kit for Meshtastic & LoRa(SKU: 102010611)
Modificar el firmware Meshtastic para el nodo remoto
El entorno objetivo para este proyecto es:
seeed-xiao-s3
Los archivos principales son:
variants/esp32s3/seeed_xiao_s3/platformio.inisrc/modules/Telemetry/EnvironmentTelemetry.hsrc/modules/Telemetry/EnvironmentTelemetry.cpp
En esta parte, solo actualiza la sección build_flags en variants/esp32s3/seeed_xiao_s3/platformio.ini. Mantén el resto del archivo original sin cambios.
build_flags =
${esp32s3_base.build_flags}
-D SEEED_XIAO_S3
-D ENVIRONMENTAL_TELEMETRY_MODULE_ENABLE=1 ; enable environmental telemetry by default
-D USERPREFS_CONFIG_LORA_REGION=meshtastic_Config_LoRaConfig_RegionCode_US ; set the default region to US
-D USERPREFS_CONFIG_DEVICE_ROLE=meshtastic_Config_DeviceConfig_Role_SENSOR ; set the default role to SENSOR
-I variants/esp32s3/seeed_xiao_s3
-DBOARD_HAS_PSRAM
-DARDUINO_USB_MODE=0
El cambio en build_flags debería verse similar a esto:
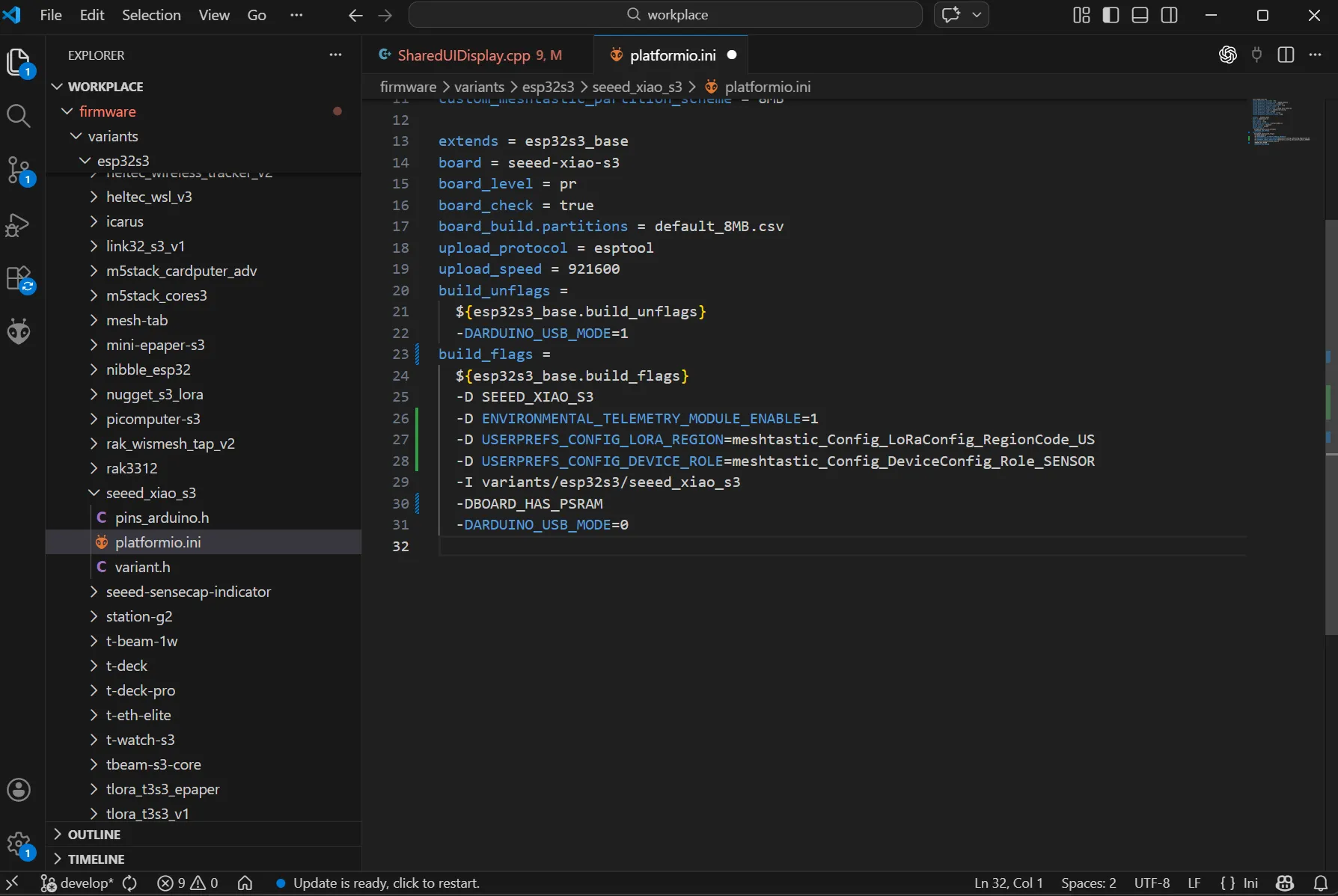
Estas tres banderas hacen lo siguiente:
- Habilitar la telemetría ambiental de forma predeterminada
- Establecer la región predeterminada en
US, de modo que el primer arranque ya no se detenga en la selección de región - Establecer el rol de dispositivo predeterminado en
SENSOR
El cambio de temporización de la telemetría se implementa en EnvironmentTelemetry.h y EnvironmentTelemetry.cpp, no en platformio.ini.
Después de la modificación completa, el comportamiento pasa a ser:
- La telemetría ambiental está habilitada de forma predeterminada
- El dispositivo se inicia con la región
US - El dispositivo se inicia con el rol
SENSOR - La telemetría ambiental de la malla se envía cada
60s path=phoneypath=meshse registran por separado- La marca de tiempo de envío de la malla solo se actualiza después de que un envío real por la malla se complete correctamente
El registro de envío de malla esperado se ve así:
Environment telemetry dispatch path=mesh dest=0xffffffff interval_mesh_s=60
Configurar el nodo pasarela cercano
Usa un dispositivo Meshtastic cercano como CLIENT en la misma malla. Después de que el nodo remoto comience a enviar telemetría, confirma que la pasarela puede recibir:
TELEMETRY_APPenvironmentMetrics.temperatureenvironmentMetrics.relativeHumidity
Si la pasarela sigue intentando conectarse a Wi‑Fi durante las pruebas, desactiva el Wi‑Fi con la CLI de Meshtastic. Sustituye <gateway_port> por tu puerto serie real, como COMx en Windows o /dev/cu.usbmodem... en macOS.
meshtastic --port <gateway_port> --set network.wifi_enabled false
Compilar, grabar y verificar
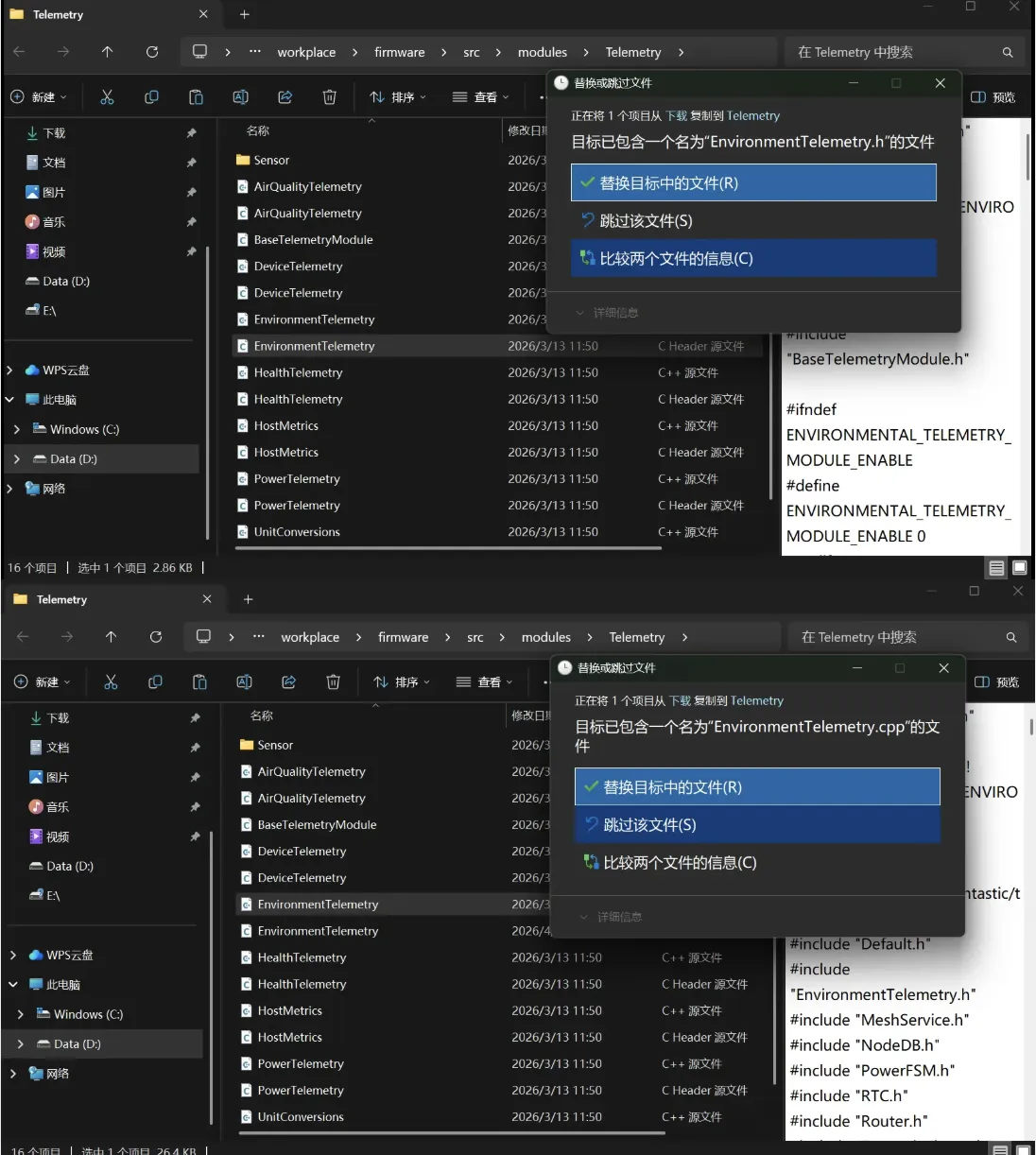
Paso 1: Copiar los archivos modificados
Antes de compilar, copia los tres archivos modificados en tu árbol de código fuente de Meshtastic 2.7.20 o 2.7.21:
| Archivo en el paquete | Sustituye este archivo en tu árbol de código fuente de Meshtastic |
|---|---|
meshtastic-2.7.20-s3-files/variants/esp32s3/seeed_xiao_s3/platformio.ini | <your Meshtastic directory>/variants/esp32s3/seeed_xiao_s3/platformio.ini |
meshtastic-2.7.20-s3-files/src/modules/Telemetry/EnvironmentTelemetry.h | <your Meshtastic directory>/src/modules/Telemetry/EnvironmentTelemetry.h |
meshtastic-2.7.20-s3-files/src/modules/Telemetry/EnvironmentTelemetry.cpp | <your Meshtastic directory>/src/modules/Telemetry/EnvironmentTelemetry.cpp |
Enlaces de descarga directa:
Si copias los archivos con un gestor de archivos gráfico, el aviso de reemplazo debería verse similar a esto:
Paso 2: Compilar el firmware remoto
Desde la raíz del firmware Meshtastic, ejecuta:
pio run -e seeed-xiao-s3

Paso 3: Subir al nodo remoto
- Windows
- macOS
pio device list
pio run -e seeed-xiao-s3 -t upload --upload-port COMx
Si necesitas entrar en modo de descarga manualmente:
- Mantén pulsado
BOOT - Pulsa
RESET - Suelta
RESET - Suelta
BOOT
pio device list
pio run -e seeed-xiao-s3 -t upload --upload-port /dev/cu.usbmodemXXXX
Usa primero pio device list para poder identificar el puerto serie correcto:

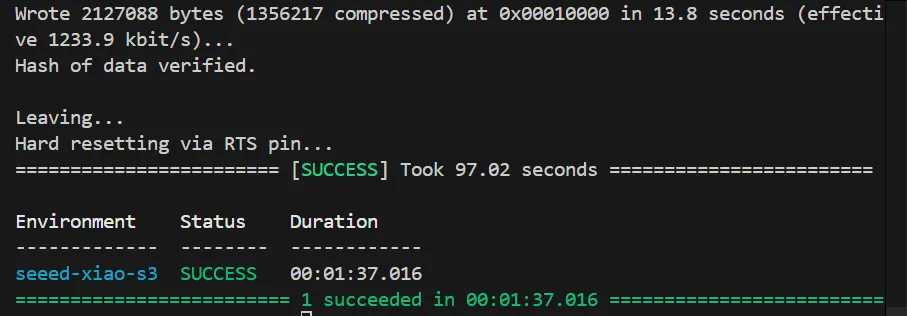
Cuando termine la carga, PlatformIO debería informar que la grabación fue correcta:
Paso 4: Supervisar los registros serie
Usa el monitor serie de PlatformIO para comprobar tanto el nodo remoto como la pasarela cercana.
- Windows
- macOS
pio device monitor -p COMx -b 115200
pio device monitor -p COMy -b 115200
pio device monitor -p /dev/cu.usbmodemE072A1D89EB81 -b 115200
pio device monitor -p /dev/cu.usbmodem3030F917FF281 -b 115200
Busca registros como:
Environment telemetry dispatch path=mesh dest=0xffffffff interval_mesh_s=60
Send: relative_humidity=...
Send: ... temperature=...
Paso 5: Validar con la CLI de Meshtastic
Primero instala la CLI:
- Windows
- macOS
pip install meshtastic
pip3 install meshtastic
Después de la instalación, vuelve a abrir la terminal y confirma que meshtastic --help funciona.
Para los comandos siguientes, sustituye <gateway_port> por el puerto serie real de tu pasarela:
- Ejemplo en Windows:
COMx - Ejemplo en macOS:
/dev/cu.usbmodem3030F917FF281
meshtastic --port <gateway_port> --listen --debug
meshtastic --port <gateway_port> --nodes --show-fields user.id,user.longName,user.shortName
meshtastic --port <gateway_port> --get bluetooth.enabled --get bluetooth.mode --get bluetooth.fixed_pin --get power.wait_bluetooth_secs --get power.is_power_saving
meshtastic --port <gateway_port> --set network.wifi_enabled false
Concéntrate en:
TELEMETRY_APPenvironmentMetrics.temperatureenvironmentMetrics.relativeHumidity
Paso 6: Confirmar en la app móvil
Después de grabar, conéctate al nodo remoto con la app móvil Meshtastic y confirma que los datos ambientales son visibles. Luego conecta la app a otro dispositivo en la misma malla y revisa la vista Nodes para confirmar que los valores del sensor se están recibiendo a través de la malla.
En el nodo sensor remoto, deberías poder ver los valores de telemetría ambiental directamente en la app:
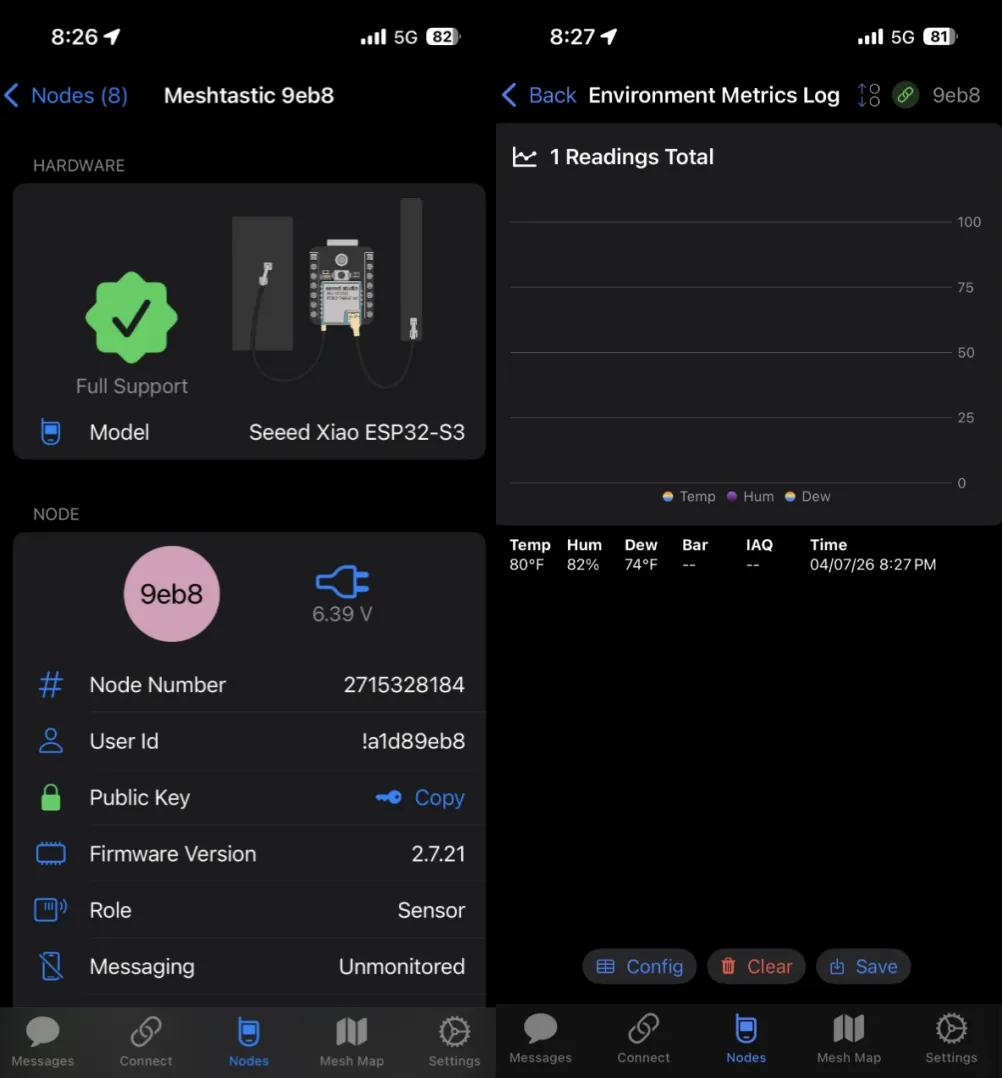
En el nodo cercano, las mismas lecturas deberían aparecer en la vista Nodes después de que se reenvíen a través de la malla:

Proyecto C: Personalización del tono de inicio y apagado del T1000-E
Objetivo del proyecto
Este ejemplo compacto se centra en una personalización a nivel de código fuente muy pequeña pero fácil de percibir: sustituir los sonidos de inicio y apagado predeterminados del T1000-E por un tono personalizado más limpio.
En comparación con el Proyecto A y el Proyecto B, este proyecto solo cambia un archivo fuente y solo dos funciones. Es un buen ejemplo de cómo realizar un cambio de comportamiento específico de una placa sin afectar al resto de la base de código de Meshtastic.
Modificar buzz.cpp
El único archivo modificado en este proyecto es:
src/buzz/buzz.cpp
Las dos funciones modificadas son:
playStartMelody()playShutdownMelody()
En ambos lugares, se añade una rama #if defined(TRACKER_T1000_E).
Esa estructura es importante porque mantiene la personalización aislada al objetivo T1000-E:
TRACKER_T1000_Eusa el tono de inicio personalizadoTRACKER_T1000_Eusa el tono de apagado personalizado correspondiente- Todas las demás placas Meshtastic siguen utilizando la melodía predeterminada original en la ruta
#elseexistente
Esto significa que el cambio es deliberadamente de alcance reducido. Personaliza la experiencia de usuario para una placa, mientras conserva el comportamiento original para todos los demás objetivos compatibles.
En mi versión de prueba local, la melodía de inicio se cambia a un tono ascendente más parecido al de un teléfono, y la melodía de apagado se cambia a un tono descendente a juego.
Si quieres documentar la modificación con mayor claridad, basta con capturar una sola captura de pantalla que incluya ambas funciones en la misma vista:
- el bloque
#if defined(TRACKER_T1000_E)enplayStartMelody() - el bloque
#if defined(TRACKER_T1000_E)enplayShutdownMelody()
Esa única captura de pantalla ya explica tanto el cambio de código como el alcance específico de la placa, por lo que no necesitas una imagen aparte solo para explicar que las otras placas no se ven afectadas.
Compilar y verificar
Cuando la modificación esté completa, compila el objetivo T1000-E:
pio run -e tracker-t1000-e
En mi compilación de prueba, este objetivo se compiló correctamente después del cambio de melodía.
Cuando la compilación pase, flashea el firmware al T1000-E y verifica el resultado directamente en el hardware:
- Enciende el dispositivo y confirma que suena el nuevo tono de inicio.
- Apaga el dispositivo y confirma que suena el tono de apagado correspondiente.
- Si es posible, compara el nuevo sonido con la melodía predeterminada original para que la diferencia sea fácil de notar.
Imágenes sugeridas
Para mantener el Proyecto C corto y legible, normalmente bastan tres imágenes:
- Una captura de pantalla de
buzz.cppque muestreplayStartMelody()yplayShutdownMelody()en el mismo cuadro - Una captura de pantalla de la terminal que muestre que
pio run -e tracker-t1000-ese ejecutó correctamente - Una imagen de verificación en el dispositivo real o un video corto que muestre la prueba de encendido o apagado del T1000-E
Si el zumbador no suena durante las pruebas, primero comprueba si el modo de zumbador del dispositivo está habilitado. En playTones(), el código termina antes de tiempo cuando el zumbador está deshabilitado o configurado en modo solo notificaciones.
Problemas comunes
El comando git no está disponible
- En Windows, primero comprueba si Git se ha añadido a
PATH. - En macOS, ejecuta primero
git --version. Si el sistema te pide instalar las Command Line Tools, sigue las indicaciones.
python3 o pip3 no están disponibles
- En Windows, confirma que Python se añadió a
PATH, o vuelve a abrir la terminal e inténtalo de nuevo. - En macOS, primero comprueba si
python3/pip3ya existen, e instala Python con Homebrew solo si es necesario.
El comando pio no está disponible
- Ejecuta primero
pio --version. - Si el comando sigue sin estar disponible, reinicia VS Code y la terminal, y luego inténtalo de nuevo.
- Si es necesario, reinstala la extensión PlatformIO y confirma que PlatformIO Core se haya inicializado correctamente.
El código sigue pareciendo incompleto después de git submodule update --init
- Primero asegúrate de estar en el directorio raíz del repositorio
firmware. - Si la conexión de red es inestable, inténtalo de nuevo con:
git submodule update --init --recursive
La primera compilación tarda demasiado
- Es normal que la primera compilación descargue muchas dependencias.
- Si parece quedarse atascada demasiado tiempo, intenta instalar primero los paquetes por separado:
pio pkg install -e seeed_wio_tracker_L1
Luego ejecuta la compilación de nuevo.
El cliente web no muestra toda la telemetría ambiental
- El cliente web de Meshtastic actualmente no proporciona una interfaz completa para la telemetría ambiental remota.
- La página
Messages/Broadcastes para tráfico de chat, no una página dedicada a telemetría. - Si los valores no aparecen allí, eso no significa automáticamente que el enlace de malla haya fallado.
Ver datos en un teléfono no demuestra el reenvío en malla
- Ver valores actualizados en un teléfono conectado directamente solo demuestra que el enlace local teléfono-dispositivo está funcionando.
- Esto no demuestra automáticamente que la telemetría ambiental ya se haya reenviado a la malla.
- Para confirmar un reenvío real en malla, comprueba estos elementos en los registros:
Environment telemetry dispatch path=mesh ...TELEMETRY_APPenvironmentMetrics.temperatureenvironmentMetrics.relativeHumidity
La compilación seeed-xiao-s3 falla durante la primera configuración
- La primera instalación de dependencias puede tardar mucho tiempo. Esto es normal.
- Si el entorno de destino falla, instala primero los paquetes y luego ejecuta una compilación detallada:
pio pkg install -e seeed-xiao-s3
pio run -e seeed-xiao-s3 -v
- Cuando las dependencias estén listas, vuelve a la compilación normal:
pio run -e seeed-xiao-s3