ORB-SLAM3 con Orbbec Gemini2

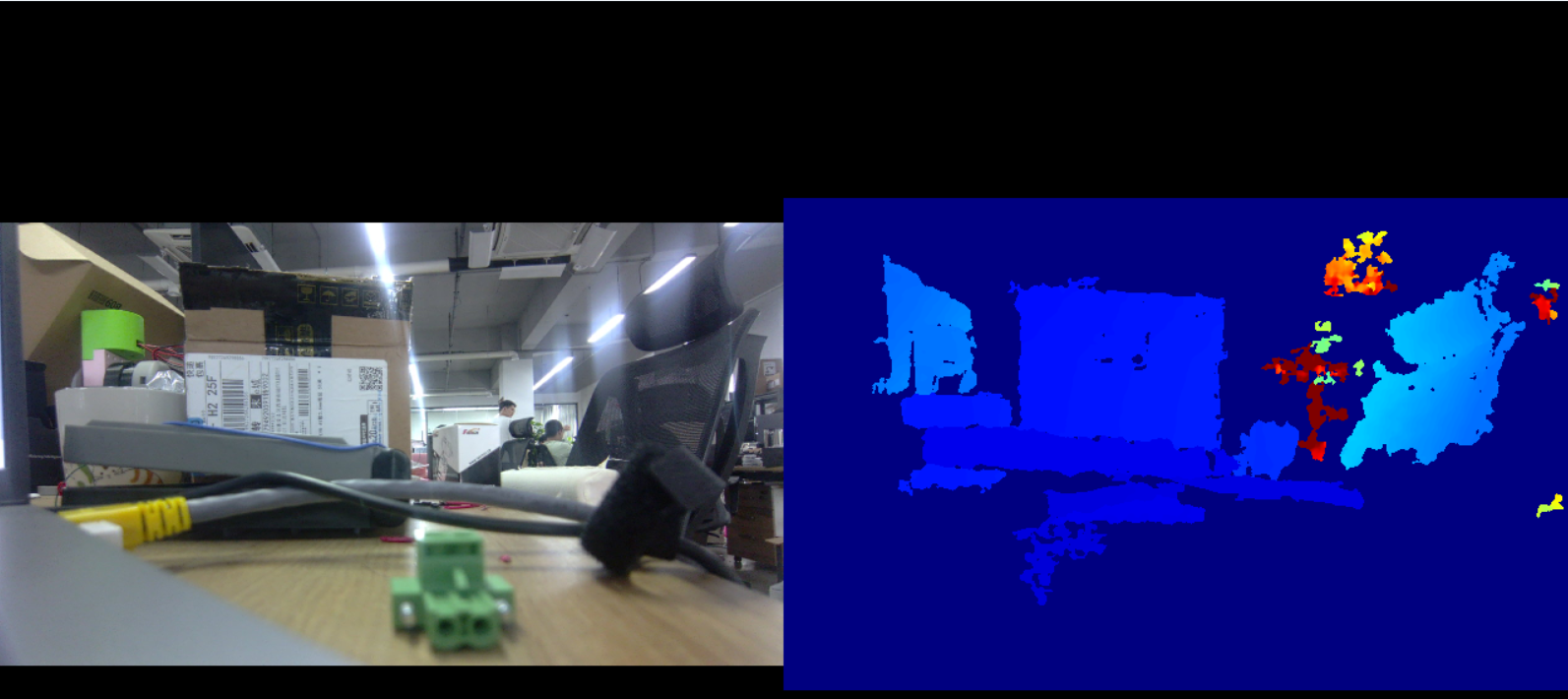
La Orbbec Gemini 2 es una cámara RGB-D de alto rendimiento que cuenta con un sensor de profundidad de luz estructurada de doble ojo y una IMU integrada de 6 ejes. Proporciona flujos de datos RGB y de profundidad completamente sincronizados, asegurando una alineación precisa de Profundidad a Color en tiempo real, lo cual es esencial para una percepción 3D precisa. Esta combinación de características hace que la Gemini 2 sea ideal para robótica, visión por computadora y otras aplicaciones 3D, permitiendo tareas como detección de objetos, mapeo, navegación y análisis espacial con alta confiabilidad y precisión. La cámara es compacta, fácil de configurar y completamente compatible con el SDK de Orbbec, haciéndola adecuada tanto para investigación como para implementaciones industriales.
Introducción
ORB-SLAM3 es un algoritmo avanzado de SLAM visual para cámaras monoculares, estéreo y RGB-D. Utiliza características ORB para seguimiento y mapeo robustos, soporta cierre de bucle y relocalización, y ofrece alta precisión y eficiencia para robótica, AR/VR y navegación autónoma. Este wiki proporciona pasos completos para configurar y ejecutar ORB-SLAM3 en reComputer Jetson Series usando una cámara RGB-D Orbbec Gemini2 para aplicaciones avanzadas de SLAM visual.
Prerrequisitos
- reComputer J30/40 con Jetpack 6.2 preinstalado
- Cámara 3D Orbbec Gemini2
- Entorno ROS2 Humble instalado

Instalar SDK de Orbbec
Paso 1. Descargar e instalar el SDK de Orbbec para arquitectura ARM64:
# Download Orbbec SDK
wget https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.11/OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64.zip
# Unzip the SDK
unzip OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64.zip
Paso 2. Compilar ejemplos y probar:
# Install udev rules
cd OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64/shared/
sudo chmod +x ./install_udev_rules.sh
sudo ./install_udev_rules.sh
sudo udevadm control --reload-rules && sudo udevadm trigger
# Build examples and setup
cd ..
./build_examples.sh
./setup.sh
Compilando ORB-SLAM3
Paso 1. Instalar dependencias del sistema:
sudo apt update && sudo apt install -y \
cmake build-essential libeigen3-dev libopencv-dev \
libglew-dev libpython2.7-dev ffmpeg libavcodec-dev \
libavutil-dev libavformat-dev libswscale-dev \
libavdevice-dev libdc1394-22-dev libraw1394-dev \
libjpeg-dev libpng-dev libtiff5-dev libopenexr-dev \
libepoxy-dev python3-dev libboost-serialization-dev
Paso 2. Instalar Pangolin que es requerido para la visualización de ORB-SLAM3:
git clone --recursive https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
git submodule update --init --recursive
# Install prerequisites
./scripts/install_prerequisites.sh recommended
# Remove conflicting packages and install OpenEXR
sudo apt remove libilmbase-dev -y
sudo apt install libopenexr-dev libimath-dev -y
# Build and install
mkdir build && cd build
cmake ..
make -j$(nproc)
sudo make install
Si encuentras errores de compilación relacionados con OpenEXR, es posible que necesites modificar el código fuente:
En ./components/pango_image/src/image_io_exr.cpp, reemplaza:
#include <ImfChannelList.h>
#include <ImfFrameBuffer.h>
#include <ImfInputFile.h>
#include <ImfOutputFile.h>
con:
#include <OpenEXR/ImfChannelList.h>
#include <OpenEXR/ImfFrameBuffer.h>
#include <OpenEXR/ImfInputFile.h>
#include <OpenEXR/ImfOutputFile.h>
Paso 3. Configuración para compilar ORB-SLAM3
cd ~
git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git
cd ORB_SLAM3
ORB-SLAM3 puede tener problemas de compatibilidad con estándares C++ más nuevos. Corrige el problema de monotonic_clock:
# Replace monotonic_clock with steady_clock in all source files
find Examples -name "*.cc" -exec sed -i 's/monotonic_clock/steady_clock/g' {} \;
Por ejemplo, en Examples/Stereo/stereo_euroc.cc:
// Change from:
std::chrono::monotonic_clock::time_point t1 = std::chrono::monotonic_clock::now();
// To:
std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();
Paso 4. Probar si Pangolin está instalado correctamente:
./examples/SimpleDisplay/SimpleDisplay
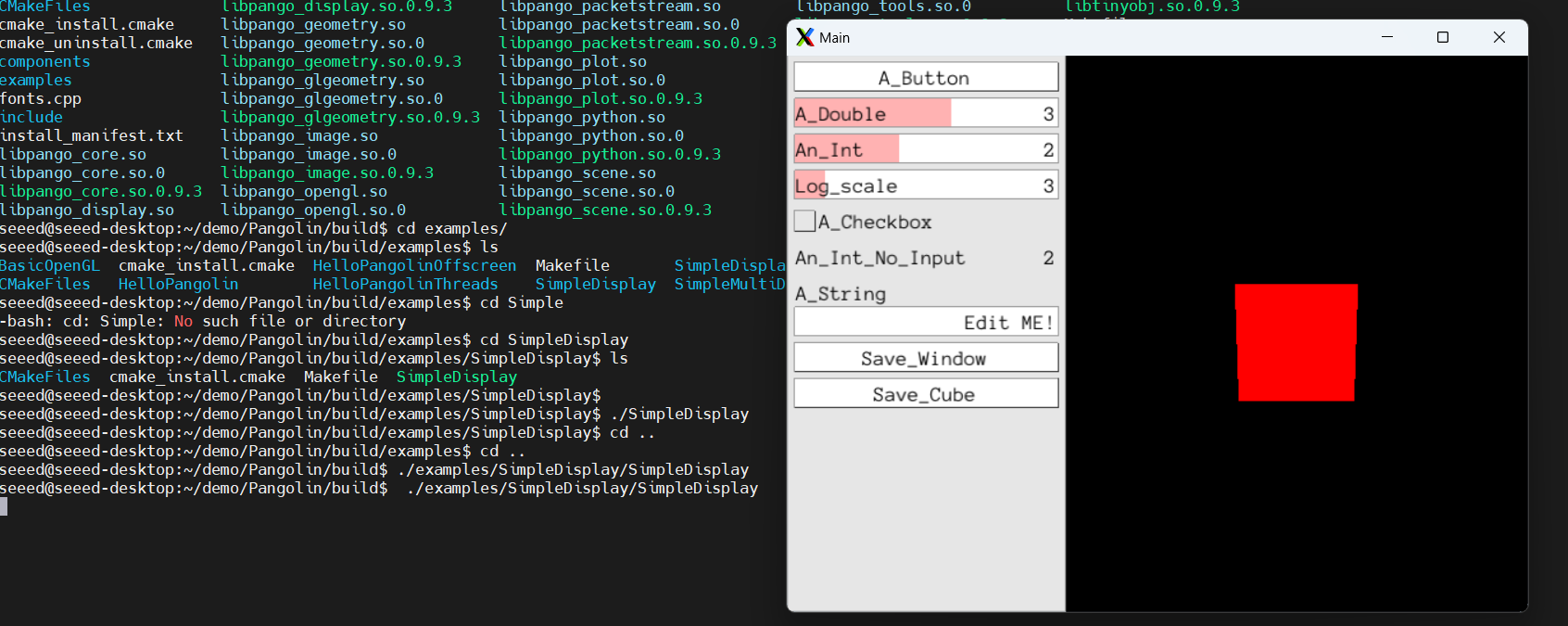
Si la instalación se realizó correctamente, la ventana como se muestra en la imagen anterior puede abrirse normalmente.
Paso 5. Modificar CMakeLists.txt
Modifica el archivo CMakeLists.txt para hacer el proyecto compatible con el SDK de Orbbec. Copia directamente la siguiente configuración completa de CMakeList.txt:
Necesitas modificar: set(ORBBEC_SDK_PATH "/home/seeed/demo/OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64") a la ruta donde instalaste tu propio SDK.
CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(ORB_SLAM3)
IF(NOT CMAKE_BUILD_TYPE)
SET(CMAKE_BUILD_TYPE Release)
ENDIF()
MESSAGE("Build type: " ${CMAKE_BUILD_TYPE})
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall -O3")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -O3")
set(CMAKE_C_FLAGS_RELEASE "${CMAKE_C_FLAGS_RELEASE} -march=native")
set(CMAKE_CXX_FLAGS_RELEASE "${CMAKE_CXX_FLAGS_RELEASE} -march=native")
# Check C++14, C++11 or C++0x support
include(CheckCXXCompilerFlag)
CHECK_CXX_COMPILER_FLAG("-std=c++14" COMPILER_SUPPORTS_CXX14)
CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11)
CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
if(COMPILER_SUPPORTS_CXX14)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++14")
add_definitions(-DCOMPILEDWITHC14)
message(STATUS "Using flag -std=c++14.")
elseif(COMPILER_SUPPORTS_CXX11)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
add_definitions(-DCOMPILEDWITHC11)
message(STATUS "Using flag -std=c++11.")
elseif(COMPILER_SUPPORTS_CXX0X)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")
add_definitions(-DCOMPILEDWITHC0X)
message(STATUS "Using flag -std=c++0x.")
else()
message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++14/11 support. Please use a different C++ compiler.")
endif()
LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules)
find_package(OpenCV 4.4)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 4.4 not found.")
endif()
MESSAGE("OPENCV VERSION:")
MESSAGE(${OpenCV_VERSION})
find_package(Eigen3 3.1.0 REQUIRED)
find_package(Pangolin REQUIRED)
find_package(realsense2)
include_directories(
${PROJECT_SOURCE_DIR}
${PROJECT_SOURCE_DIR}/include
${PROJECT_SOURCE_DIR}/include/CameraModels
${PROJECT_SOURCE_DIR}/Thirdparty/Sophus
${EIGEN3_INCLUDE_DIR}
${Pangolin_INCLUDE_DIRS}
)
set(CMAKE_LIBRARY_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/lib)
add_library(${PROJECT_NAME} SHARED
src/System.cc
src/Tracking.cc
src/LocalMapping.cc
src/LoopClosing.cc
src/ORBextractor.cc
src/ORBmatcher.cc
src/FrameDrawer.cc
src/Converter.cc
src/MapPoint.cc
src/KeyFrame.cc
src/Atlas.cc
src/Map.cc
src/MapDrawer.cc
src/Optimizer.cc
src/Frame.cc
src/KeyFrameDatabase.cc
src/Sim3Solver.cc
src/Viewer.cc
src/ImuTypes.cc
src/G2oTypes.cc
src/CameraModels/Pinhole.cpp
src/CameraModels/KannalaBrandt8.cpp
src/OptimizableTypes.cpp
src/MLPnPsolver.cpp
src/GeometricTools.cc
src/TwoViewReconstruction.cc
src/Config.cc
src/Settings.cc
include/System.h
include/Tracking.h
include/LocalMapping.h
include/LoopClosing.h
include/ORBextractor.h
include/ORBmatcher.h
include/FrameDrawer.h
include/Converter.h
include/MapPoint.h
include/KeyFrame.h
include/Atlas.h
include/Map.h
include/MapDrawer.h
include/Optimizer.h
include/Frame.h
include/KeyFrameDatabase.h
include/Sim3Solver.h
include/Viewer.h
include/ImuTypes.h
include/G2oTypes.h
include/CameraModels/GeometricCamera.h
include/CameraModels/Pinhole.h
include/CameraModels/KannalaBrandt8.h
include/OptimizableTypes.h
include/MLPnPsolver.h
include/GeometricTools.h
include/TwoViewReconstruction.h
include/SerializationUtils.h
include/Config.h
include/Settings.h)
add_subdirectory(Thirdparty/g2o)
target_link_libraries(${PROJECT_NAME}
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/Thirdparty/g2o/lib/libg2o.so
-lboost_serialization
-lcrypto
)
# If RealSense SDK is found the library is added and its examples compiled
if(realsense2_FOUND)
include_directories(${PROJECT_NAME}
${realsense_INCLUDE_DIR}
)
target_link_libraries(${PROJECT_NAME}
${realsense2_LIBRARY}
)
endif()
# Check for Orbbec SDK
# Try to find OrbbecSDK in the local directory first
set(ORBBEC_SDK_PATH "/home/seeed/demo/OrbbecSDK_v2.4.11_202508040936_058db73_linux_aarch64")
if(EXISTS ${ORBBEC_SDK_PATH})
set(ORBBEC_FOUND TRUE)
set(ORBBEC_INCLUDE_DIRS ${ORBBEC_SDK_PATH}/include)
set(ORBBEC_LIBRARIES ${ORBBEC_SDK_PATH}/lib/libOrbbecSDK.so)
message(STATUS "Orbbec SDK found at: ${ORBBEC_SDK_PATH}")
message(STATUS "Orbbec SDK include dirs: ${ORBBEC_INCLUDE_DIRS}")
message(STATUS "Orbbec SDK library: ${ORBBEC_LIBRARIES}")
else()
# Fallback to pkg-config
find_package(PkgConfig)
if(PkgConfig_FOUND)
pkg_check_modules(ORBBEC ob_api)
if(ORBBEC_FOUND)
message(STATUS "Orbbec SDK found via pkg-config: ${ORBBEC_VERSION}")
endif()
endif()
endif()
if(ORBBEC_FOUND)
include_directories(${PROJECT_NAME}
${ORBBEC_INCLUDE_DIRS}
)
target_link_libraries(${PROJECT_NAME}
${ORBBEC_LIBRARIES}
)
else()
message(WARNING "Orbbec SDK not found. Orbbec examples will not be compiled.")
endif()
# Build examples
# RGB-D examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/RGB-D)
add_executable(rgbd_tum
Examples/RGB-D/rgbd_tum.cc)
target_link_libraries(rgbd_tum ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(rgbd_realsense_D435i
Examples/RGB-D/rgbd_realsense_D435i.cc)
target_link_libraries(rgbd_realsense_D435i ${PROJECT_NAME})
endif()
if(ORBBEC_FOUND)
add_executable(rgbd_orbbec_gemini2
Examples/RGB-D/rgbd_orbbec_gemini2_cpp.cc)
target_link_libraries(rgbd_orbbec_gemini2 ${PROJECT_NAME})
endif()
# RGB-D inertial examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/RGB-D-Inertial)
if(realsense2_FOUND)
add_executable(rgbd_inertial_realsense_D435i
Examples/RGB-D-Inertial/rgbd_inertial_realsense_D435i.cc)
target_link_libraries(rgbd_inertial_realsense_D435i ${PROJECT_NAME})
endif()
# Stereo examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Stereo)
add_executable(stereo_kitti
Examples/Stereo/stereo_kitti.cc)
target_link_libraries(stereo_kitti ${PROJECT_NAME})
add_executable(stereo_euroc
Examples/Stereo/stereo_euroc.cc)
target_link_libraries(stereo_euroc ${PROJECT_NAME})
add_executable(stereo_tum_vi
Examples/Stereo/stereo_tum_vi.cc)
target_link_libraries(stereo_tum_vi ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(stereo_realsense_t265
Examples/Stereo/stereo_realsense_t265.cc)
target_link_libraries(stereo_realsense_t265 ${PROJECT_NAME})
add_executable(stereo_realsense_D435i
Examples/Stereo/stereo_realsense_D435i.cc)
target_link_libraries(stereo_realsense_D435i ${PROJECT_NAME})
endif()
# Monocular examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Monocular)
add_executable(mono_tum
Examples/Monocular/mono_tum.cc)
target_link_libraries(mono_tum ${PROJECT_NAME})
add_executable(mono_kitti
Examples/Monocular/mono_kitti.cc)
target_link_libraries(mono_kitti ${PROJECT_NAME})
add_executable(mono_euroc
Examples/Monocular/mono_euroc.cc)
target_link_libraries(mono_euroc ${PROJECT_NAME})
add_executable(mono_tum_vi
Examples/Monocular/mono_tum_vi.cc)
target_link_libraries(mono_tum_vi ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(mono_realsense_t265
Examples/Monocular/mono_realsense_t265.cc)
target_link_libraries(mono_realsense_t265 ${PROJECT_NAME})
add_executable(mono_realsense_D435i
Examples/Monocular/mono_realsense_D435i.cc)
target_link_libraries(mono_realsense_D435i ${PROJECT_NAME})
endif()
# Monocular inertial examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Monocular-Inertial)
add_executable(mono_inertial_euroc
Examples/Monocular-Inertial/mono_inertial_euroc.cc)
target_link_libraries(mono_inertial_euroc ${PROJECT_NAME})
add_executable(mono_inertial_tum_vi
Examples/Monocular-Inertial/mono_inertial_tum_vi.cc)
target_link_libraries(mono_inertial_tum_vi ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(mono_inertial_realsense_t265
Examples/Monocular-Inertial/mono_inertial_realsense_t265.cc)
target_link_libraries(mono_inertial_realsense_t265 ${PROJECT_NAME})
add_executable(mono_inertial_realsense_D435i
Examples/Monocular-Inertial/mono_inertial_realsense_D435i.cc)
target_link_libraries(mono_inertial_realsense_D435i ${PROJECT_NAME})
endif()
# Stereo Inertial examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Stereo-Inertial)
add_executable(stereo_inertial_euroc
Examples/Stereo-Inertial/stereo_inertial_euroc.cc)
target_link_libraries(stereo_inertial_euroc ${PROJECT_NAME})
add_executable(stereo_inertial_tum_vi
Examples/Stereo-Inertial/stereo_inertial_tum_vi.cc)
target_link_libraries(stereo_inertial_tum_vi ${PROJECT_NAME})
if(realsense2_FOUND)
add_executable(stereo_inertial_realsense_t265
Examples/Stereo-Inertial/stereo_inertial_realsense_t265.cc)
target_link_libraries(stereo_inertial_realsense_t265 ${PROJECT_NAME})
add_executable(stereo_inertial_realsense_D435i
Examples/Stereo-Inertial/stereo_inertial_realsense_D435i.cc)
target_link_libraries(stereo_inertial_realsense_D435i ${PROJECT_NAME})
endif()
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Calibration)
if(realsense2_FOUND)
add_executable(recorder_realsense_D435i
Examples/Calibration/recorder_realsense_D435i.cc)
target_link_libraries(recorder_realsense_D435i ${PROJECT_NAME})
add_executable(recorder_realsense_T265
Examples/Calibration/recorder_realsense_T265.cc)
target_link_libraries(recorder_realsense_T265 ${PROJECT_NAME})
endif()
# Old examples - DISABLED to avoid compilation issues
# Uncomment the following lines if you need the old examples
# # RGB-D examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/RGB-D)
#
# add_executable(rgbd_tum_old
# Examples_old/RGB-D/rgbd_tum.cc)
# target_link_libraries(rgbd_tum_old ${PROJECT_NAME})
#
# if(realsense2_FOUND)
# add_executable(rgbd_realsense_D435i_old
# Examples_old/RGB-D/rgbd_realsense_D435i.cc)
# target_link_libraries(rgbd_realsense_D435i_old ${PROJECT_NAME})
# endif()
#
# # RGB-D inertial examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/RGB-D-Inertial)
#
# if(realsense2_FOUND)
# add_executable(rgbd_inertial_realsense_D435i_old
# Examples_old/RGB-D-Inertial/rgbd_inertial_realsense_D435i.cc)
# target_link_libraries(rgbd_inertial_realsense_D435i_old ${PROJECT_NAME})
# endif()
#
# #Stereo examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Stereo)
#
# add_executable(stereo_kitti_old
# Examples_old/Stereo/stereo_kitti.cc)
# target_link_libraries(stereo_kitti_old ${PROJECT_NAME})
#
# add_executable(stereo_euroc_old
# Examples_old/Stereo/stereo_euroc.cc)
# target_link_libraries(stereo_euroc_old ${PROJECT_NAME})
#
# add_executable(stereo_tum_vi_old
# Examples_old/Stereo/stereo_tum_vi.cc)
# target_link_libraries(stereo_tum_vi_old ${PROJECT_NAME})
#
# if(realsense2_FOUND)
# add_executable(stereo_realsense_t265_old
# Examples_old/Stereo/stereo_realsense_t265.cc)
# target_link_libraries(stereo_realsense_t265_old ${PROJECT_NAME})
#
# add_executable(stereo_realsense_D435i_old
# Examples_old/Stereo/stereo_realsense_D435i.cc)
# target_link_libraries(stereo_realsense_D435i_old ${PROJECT_NAME})
# endif()
#
# #Monocular examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Monocular)
#
# add_executable(mono_tum_old
# Examples_old/Monocular/mono_tum.cc)
# target_link_libraries(mono_tum_old ${PROJECT_NAME})
#
# add_executable(mono_kitti_old
# Examples_old/Monocular/mono_kitti.cc)
# target_link_libraries(mono_tum_old ${PROJECT_NAME})
#
# add_executable(mono_euroc_old
# Examples_old/Monocular/mono_euroc.cc)
# target_link_libraries(mono_euroc_old ${PROJECT_NAME})
#
# add_executable(mono_tum_vi_old
# Examples_old/Monocular/mono_tum_vi.cc)
# target_link_libraries(mono_tum_vi_old ${PROJECT_NAME})
#
# if(realsense2_FOUND)
# add_executable(mono_realsense_t265_old
# Examples_old/Monocular/mono_realsense_t265.cc)
# target_link_libraries(mono_realsense_t265_old ${PROJECT_NAME})
#
# add_executable(mono_realsense_D435i_old
# Examples_old/Monocular/mono_realsense_D435i.cc)
# target_link_libraries(mono_realsense_D435i_old ${PROJECT_NAME})
# endif()
#
# #Monocular inertial examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Monocular-Inertial)
#
# add_executable(mono_inertial_euroc_old
# Examples_old/Monocular-Inertial/mono_inertial_euroc.cc)
# target_link_libraries(mono_inertial_euroc_old ${PROJECT_NAME})
#
# add_executable(mono_inertial_tum_vi_old
# Examples_old/Monocular-Inertial/mono_inertial_tum_vi.cc)
# target_link_libraries(mono_inertial_tum_vi_old ${PROJECT_NAME})
#
# if(realsense2_FOUND)
# add_executable(mono_inertial_realsense_t265_old
# Examples_old/Monocular-Inertial/mono_inertial_realsense_t265.cc)
# target_link_libraries(mono_inertial_realsense_t265_old ${PROJECT_NAME})
#
# add_executable(mono_inertial_realsense_D435i_old
# Examples_old/Monocular-Inertial/mono_inertial_realsense_D435i.cc)
# target_link_libraries(mono_inertial_realsense_D435i_old ${PROJECT_NAME})
# endif()
#
# #Stereo Inertial examples
# set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Stereo-Inertial)
#
# add_executable(stereo_inertial_euroc_old
# Examples_old/Stereo-Inertial/stereo_inertial_realsense_t265.cc)
# target_link_libraries(stereo_inertial_realsense_t265_old ${PROJECT_NAME})
#
# add_executable(stereo_inertial_tum_vi_old
# Examples_old/Stereo-Inertial/stereo_inertial_tum_vi.cc)
# target_link_libraries(stereo_inertial_tum_vi_old ${PROJECT_NAME})
#
# if(realsense2_FOUND)
# add_executable(stereo_inertial_realsense_t265_old
# Examples_old/Stereo-Inertial/stereo_inertial_realsense_t265.cc)
# target_link_libraries(stereo_inertial_realsense_t265_old ${PROJECT_NAME})
#
# add_executable(stereo_inertial_realsense_D435i_old
# Examples_old/Stereo-Inertial/stereo_inertial_realsense_D435i.cc)
# target_link_libraries(stereo_inertial_realsense_D435i_old ${PROJECT_NAME})
# endif()
Paso 6. Crear un script que use el adaptador Orbbec Gemini2 para el modo RGB-D de ORB-SLAM3
Crear un archivo llamado rgbd_orbbec_gemini2_cpp.cc bajo el directorio Examples/RGB-D/ de la siguiente manera:
rgbd_orbbec_gemini2_cpp.cc
/**
* This file is part of ORB-SLAM3
*
* Copyright (C) 2017-2021 Carlos Campos, Richard Elvira, Juan J. Gómez Rodríguez, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
* Copyright (C) 2014-2016 Raúl Mur-Artal, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
*
* ORB-SLAM3 is free software: you can redistribute it and/or modify it under the terms of the GNU General Public
* License as published by the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* ORB-SLAM3 is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the
* implied warranty of MERCHANTABILITY or PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License along with ORB-SLAM3.
* If not, see <http://www.gnu.org/licenses/>.
*/
# include <signal.h>
# include <stdlib.h>
# include <iostream>
# include <algorithm>
# include <fstream>
# include <chrono>
# include <ctime>
# include <sstream>
# include <condition_variable>
# include <mutex>
# include <thread>
# include <opencv2/core/core.hpp>
# include <libobsensor/ObSensor.hpp>
# include <libobsensor/h/ObTypes.h>
# include <System.h>
using namespace std;
bool b_continue_session;
void exit_loop_handler(int s){
cout << "Finishing session" << endl;
b_continue_session = false;
}
// Orbbec Gemini 2 camera parameters
const int WIDTH = 640;
const int HEIGHT = 480;
const int FPS = 30;
// Global variables for camera data
cv::Mat imCV, depthCV;
double timestamp_image = -1.0;
bool image_ready = false;
int count_im_buffer = 0;
// Mutex and condition variable for thread synchronization
std::mutex imu_mutex;
std::condition_variable cond_image_rec;
// Orbbec pipeline and config using C++ API
std::shared_ptr<ob::Pipeline> pipeline = nullptr;
std::shared_ptr<ob::Config> config = nullptr;
// Callback function for receiving frames from Orbbec Gemini 2
void orbbec_frame_callback(std::shared_ptr<ob::FrameSet> frameSet) {
std::unique_lock<std::mutex> lock(imu_mutex);
if (frameSet == nullptr) {
return;
}
count_im_buffer++;
// Get current timestamp
double new_timestamp_image = std::chrono::duration_cast<std::chrono::milliseconds>(
std::chrono::system_clock::now().time_since_epoch()).count() * 1e-3;
// Limit frame rate to 15 FPS to reduce processing load
if (abs(timestamp_image - new_timestamp_image) < 0.067) { // 1/15 = 0.067 seconds
count_im_buffer--;
return;
}
try {
// Process color frame
auto colorFrame = frameSet->getFrame(OB_FRAME_COLOR);
if (colorFrame != nullptr) {
auto videoFrame = colorFrame->as<ob::VideoFrame>();
uint32_t width = videoFrame->getWidth();
uint32_t height = videoFrame->getHeight();
OBFormat format = videoFrame->getFormat();
// Convert to OpenCV Mat
if (format == OB_FORMAT_RGB || format == OB_FORMAT_BGR) {
uint8_t* data = (uint8_t*)videoFrame->getData();
imCV = cv::Mat(height, width, CV_8UC3, data);
if (format == OB_FORMAT_RGB) {
cv::cvtColor(imCV, imCV, cv::COLOR_RGB2BGR);
}
// Resize image for better performance (smaller size for faster processing)
cv::resize(imCV, imCV, cv::Size(640, 360));
// Add small delay to prevent overwhelming the system
std::this_thread::sleep_for(std::chrono::milliseconds(10));
}
}
// Process depth frame
auto depthFrame = frameSet->getFrame(OB_FRAME_DEPTH);
if (depthFrame != nullptr) {
auto videoFrame = depthFrame->as<ob::VideoFrame>();
uint32_t width = videoFrame->getWidth();
uint32_t height = videoFrame->getHeight();
uint8_t* data = (uint8_t*)videoFrame->getData();
// Convert to OpenCV Mat (depth is 16-bit)
depthCV = cv::Mat(height, width, CV_16U, data);
// Resize depth image for better performance (smaller size for faster processing)
cv::resize(depthCV, depthCV, cv::Size(640, 360));
}
timestamp_image = new_timestamp_image;
image_ready = true;
} catch (const ob::Error& e) {
std::cerr << "Error processing frames: " << e.what() << std::endl;
}
lock.unlock();
cond_image_rec.notify_all();
}
int main(int argc, char **argv)
{
if(argc != 3)
{
cerr << endl << "Usage: ./rgbd_orbbec_gemini2_cpp path_to_vocabulary path_to_settings" << endl;
return 1;
}
// Check if vocabulary file exists
if (strcmp(argv[1], "-") == 0) {
cerr << "Vocabulary file not found." << endl;
exit(-1);
}
// Check if settings file exists
if (strcmp(argv[2], "-") == 0) {
cerr << "Settings file not found." << endl;
exit(-1);
}
try {
// Create pipeline using C++ API
pipeline = std::make_shared<ob::Pipeline>();
cout << "✓ Pipeline created successfully" << endl;
// Get device info
auto device = pipeline->getDevice();
if (device) {
auto deviceInfo = device->getDeviceInfo();
cout << "✓ Device name: " << deviceInfo->getName() << endl;
cout << "✓ Device serial: " << deviceInfo->getSerialNumber() << endl;
}
// Create config
config = std::make_shared<ob::Config>();
// Enable color stream
config->enableVideoStream(OB_STREAM_COLOR, OB_WIDTH_ANY, OB_HEIGHT_ANY, OB_FPS_ANY, OB_FORMAT_RGB);
cout << "✓ Color stream enabled" << endl;
// Enable depth stream
config->enableVideoStream(OB_STREAM_DEPTH, OB_WIDTH_ANY, OB_HEIGHT_ANY, OB_FPS_ANY, OB_FORMAT_Y16);
cout << "✓ Depth stream enabled" << endl;
// Start pipeline with callback
pipeline->start(config, orbbec_frame_callback);
cout << "✓ Orbbec Gemini 2 pipeline started successfully!" << endl;
} catch (const ob::Error& e) {
cerr << "Failed to initialize Orbbec SDK: " << e.what() << endl;
return -1;
} catch (const std::exception& e) {
cerr << "Exception during initialization: " << e.what() << endl;
return -1;
}
// Create SLAM system
ORB_SLAM3::System SLAM(argv[1], argv[2], ORB_SLAM3::System::RGBD, true, 0, "");
float imageScale = SLAM.GetImageScale();
double timestamp;
cv::Mat im, depth;
double t_resize = 0.f;
double t_track = 0.f;
cout << "Starting SLAM system..." << endl;
// Main loop
while (!SLAM.isShutDown())
{
{
std::unique_lock<std::mutex> lk(imu_mutex);
if (!image_ready)
cond_image_rec.wait(lk);
if (count_im_buffer > 1)
cout << count_im_buffer - 1 << " dropped frames\n";
count_im_buffer = 0;
timestamp = timestamp_image;
im = imCV.clone();
depth = depthCV.clone();
image_ready = false;
}
if (imageScale != 1.f)
{
int width = im.cols * imageScale;
int height = im.rows * imageScale;
cv::resize(im, im, cv::Size(width, height));
cv::resize(depth, depth, cv::Size(width, height));
}
// Pass the image to the SLAM system
SLAM.TrackRGBD(im, depth, timestamp);
}
cout << "System shutdown!" << endl;
// Cleanup
if (pipeline) {
pipeline->stop();
cout << "✓ Pipeline stopped" << endl;
}
return 0;
}
Paso 7. Compilar ORB-SLAM3
chmod +x build.sh
./build.sh
Calibración de Cámara
Antes de ejecutar ORB-SLAM3, es necesario calibrar la Cámara para obtener la configuración de parámetros de la cámara. Aquí, demostramos el uso de la herramienta de calibración de cámara proporcionada por ROS para calibrar la cámara y obtener sus parámetros.
Paso 1. Instalar el Driver ROS2 de Orbbec
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
git clone https://github.com/orbbec/OrbbecSDK_ROS2.git
# Install dependencies
sudo apt install libgflags-dev nlohmann-json3-dev \
ros-$ROS_DISTRO-image-transport ros-${ROS_DISTRO}-image-transport-plugins \
ros-${ROS_DISTRO}-compressed-image-transport ros-$ROS_DISTRO-image-publisher \
ros-$ROS_DISTRO-camera-info-manager ros-$ROS_DISTRO-diagnostic-updater \
ros-$ROS_DISTRO-diagnostic-msgs ros-$ROS_DISTRO-statistics-msgs \
ros-$ROS_DISTRO-backward-ros libdw-dev
# Install udev rules
cd ~/ros2_ws/src/OrbbecSDK_ROS2/orbbec_camera/scripts
sudo bash install_udev_rules.sh
sudo udevadm control --reload-rules && sudo udevadm trigger
# Build
cd ~/ros2_ws/
colcon build --event-handlers console_direct+ --cmake-args -DCMAKE_BUILD_TYPE=Release
# Source and launch
source ./install/setup.bash
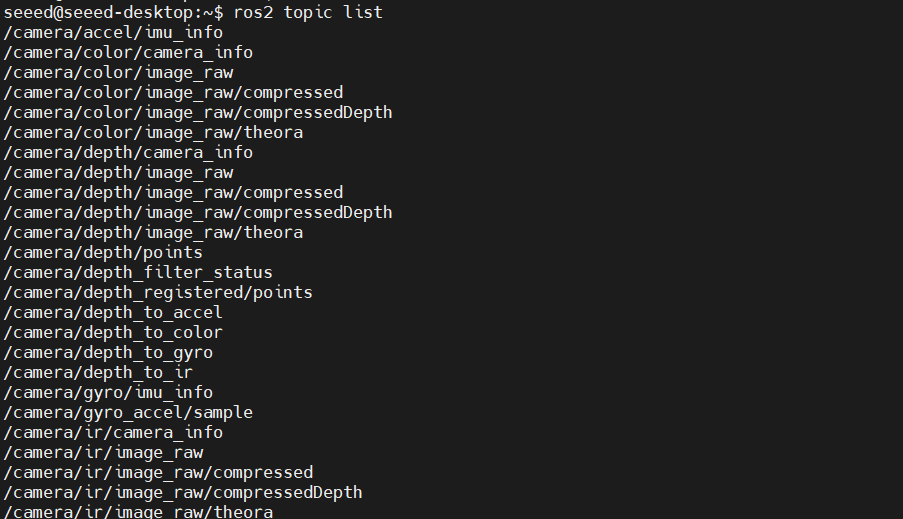
ros2 launch orbbec_camera gemini2.launch.py
Puedes verificar si el nodo de la cámara puede iniciarse normalmente observando si el tópico de datos de la cámara se publica normalmente.
Paso 2. Instalar el Paquete de Calibración de Cámara
sudo apt install ros-humble-camera-calibration
Paso 3. Descargar el Tablero de Calibración
Descarga el tablero de calibración desde Checkerboard Collection e imprímelo.
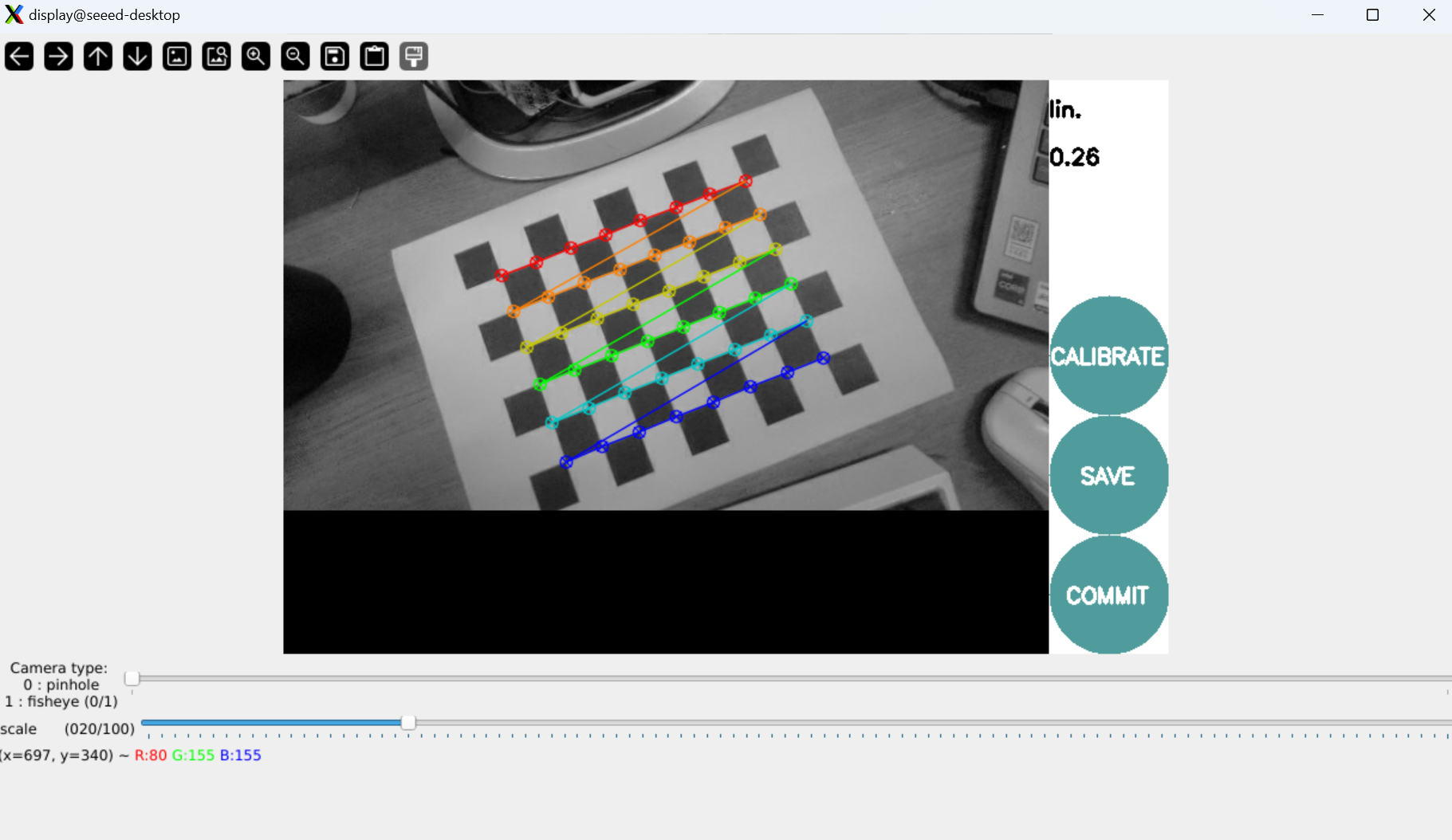
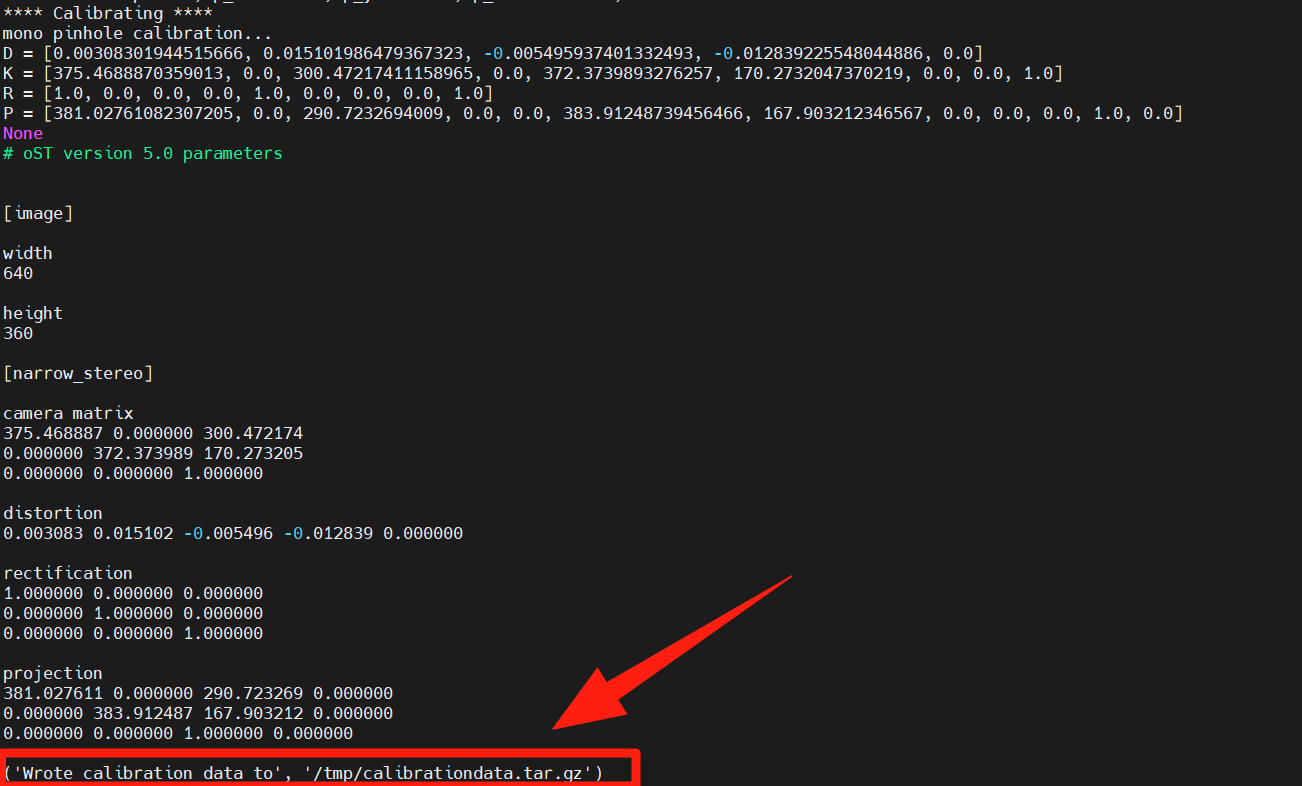
Paso 4. Ejecutar la Calibración de Cámara
# For 8x6 checkerboard with 25mm squares
ros2 run camera_calibration cameracalibrator --size 8x6 --square 0.025 \
--ros-args --remap image:=/camera/color/image_raw --remap camera:=/camera/color
--size 8x6se refiere al número de esquinas internas (8×6 = 48 esquinas para una cuadrícula de 9×7)--square 0.025se refiere al tamaño del cuadrado en metros (25mm)- Mueve la cámara alrededor para capturar imágenes desde diferentes ángulos
Recopila imágenes desde diferentes ángulos, calcula automáticamente los parámetros de la cámara y guarda los datos de calibración en una herramienta.
Paso 5. Configurar el archivo YAML de la cámara
Crea un archivo de configuración de parámetros.yaml llamado Orbbec_Gemini2.yaml para la cámara Orbbec Gemini2 bajo la carpeta Examples/RGB-D/ en tu proyecto ORB-SLAM3.
Orbbec_Gemini2.yaml
%YAML:1.0
# --------------------------------------------------------------------------------------------
# Camera Parameters
# --------------------------------------------------------------------------------------------
File.version: "1.0"
Camera.type: "PinHole"
# Camera calibration and distortion parameters
Camera1.fx: 375.46889
Camera1.fy: 372.37399
Camera1.cx: 300.47217
Camera1.cy: 170.2732
# distortion parameters
Camera1.k1: 0.003083
Camera1.k2: 0.015102
Camera1.p1: -0.005496
Camera1.p2: -0.012839
Camera1.k3: 0.0
# Camera resolution
Camera.width: 640
Camera.height: 360
# Camera frames per second
Camera.fps: 30
# Color order of the images (0: BGR, 1: RGB)
Camera.RGB: 1
# Stereo/Depth 参数(如果是单目,可以不用)
Stereo.ThDepth: 40.0
Stereo.b: 0.0745
# Depth map scale
RGBD.DepthMapFactor: 1000.0
# --------------------------------------------------------------------------------------------
# ORB Parameters
# --------------------------------------------------------------------------------------------
ORBextractor.nFeatures: 800
ORBextractor.scaleFactor: 1.2
ORBextractor.nLevels: 6
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
# --------------------------------------------------------------------------------------------
# Viewer Parameters
# --------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1.0
Viewer.GraphLineWidth: 0.9
Viewer.PointSize: 2.0
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3.0
Viewer.ViewpointX: 0.0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -3.5
Viewer.ViewpointF: 500.0
Ejecutando ORB-SLAM3
# Set Library Path
export LD_LIBRARY_PATH=/usr/local/lib:$LD_LIBRARY_PATH
# Run RGB-D mode slam
./Examples/RGB-D/rgbd_orbbec_gemini2 Vocabulary/ORBvoc.txt Examples/RGB-D/Orbbec_Gemini2.yaml
Recursos
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarte diferentes tipos de soporte para asegurar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para satisfacer diferentes preferencias y necesidades.