Cámara Estéreo Orbbec Gemini 335Lg

Gemini 335Lg es un modelo destacado en la serie Gemini 330, sirviendo como la versión GMSL2/FAKRA del Gemini 335L probado en la industria.
El serializador GMSL2 combinado con el conector FAKRA asegura conectividad segura y confiable para robots móviles autónomos (AMRs) navegando entornos complejos y brazos robóticos que requieren cableado flexible.
Especificaciones
| Categoría | Especificación | Gemini 335Lg |
|---|---|---|
| Básico | Entorno de uso | Interior y exterior |
| Tecnología | Estéreo activo y pasivo | |
| Línea base | 95mm | |
| Conexión de datos | GMSL2 FAKRA y USB 3 | |
| Protocolo de cámara | USB y GMSL 2 | |
| Compatible con UVC | Sí | |
| SDK | Orbbec SDK | |
| Profundidad | Rango de profundidad [1] | 0.17m - 20m+ |
| Rango ideal | 0.25m - 6m | |
| Resolución de profundidad / FPS | Up to: 1280 × 800 @ 30fps; 848 × 480 @ 60fps | |
| FOV de profundidad (H × V) | 90° × 65° ± 3° @ 2m | |
| FOV de profundidad (H × V) con D2C | Up to: 90° × 65° ± 3° @ 2m | |
| Precisión espacial [2] | ≤0.8% @ 2m; ≤1.6% @ 4m | |
| Tecnología del sensor de profundidad | Global Shutter | |
| Filtro de profundidad | Paso visible + NIR | |
| IR | Resolución IR / FPS | Up to: 1280 × 800 @ 30fps; 848 × 480 @ 60fps |
| FOV IR (H × V) | 91° × 65° ± 3° | |
| RGB | Resolución RGB / FPS | Up to 1280 × 800 @ 60 FPS; 1280 × 720 @ 60 FPS |
| FOV del sensor RGB (H × V) | 94° × 68° ± 3° | |
| Tecnología del sensor RGB | Global Shutter | |
| Sensor integrado | IMU | Compatible |
| Eléctrico | Consumo de energía | GMSL2: Average ≤ 3.8 W (Peak ≤ 7.5W); USB3: Average ≤ 3.0 W (Peak ≤ 6W) |
| Alimentación | GMSL2: For Best Performance, DC 12V/≥0.7A (Laser Energy Level 6); For Default Performance: DC 12V/≥0.5A [3] (Laser Energy Level 4); USB 3: DC 5V/≥1.5A | |
| Físico | Sincronización HW multicámara | 8-pin & FAKRA-Z |
| Dimensiones (An × Al × Pr) | 124 mm × 29mm × 36 mm | |
| Peso | 164g ± 3g | |
| Protección IP [4] | IP65 | |
| Instalación | Bottom: 1 × 1/4 - 20 UNC; BACK: 2 × M4 | |
| Ambiental | Temperatura ambiente | -10℃ - 50 ℃ @ 15 FPS; -10℃ - 45 ℃ @ 30/60 FPS |
| Requisitos EMC | EN61000-6-2; EN610000-6-4 | |
| Vibración | 3.8Grms @ 5 ~ 500 Hz, random, 2hr/axis | |
| Otros | Vida útil [5] | 5 years |
[1] Rango de profundidad máximo teórico hasta 65 metros;
[2] Datos medidos durante la calibración de fábrica;
[3] El nivel de energía láser predeterminado de Gemini 335Lg está configurado en Nivel 4 para reducir el consumo de energía pico y prevenir fallas operacionales. Cuando hay suficiente energía disponible, los usuarios pueden ajustar manualmente el láser al Nivel 6 máximo para lograr un rendimiento óptimo;
[4] Tanto Gemini 335L como 335Lg requieren el uso de cables compatibles con IP65 durante las operaciones de encendido para lograr protección IP65;
[5] No más de 16h de trabajo por día.
Configurar el Dispositivo
En este tutorial, demostramos tanto la conexión USB 3 como GMSL2. Especificación del dispositivo host:
- reComputer Robotics J4012 con GMSL
- JetPack 6.2 (Ubuntu 22.04)
Para el tutorial en x86_64 Windows/Linux, o MacOS (x86_64, potencialmente Apple Silicon), por favor consulte el README del Repositorio SDK
Descargar e Instalar Orbbec Viewer
- Abra una terminal en su dispositivo Jetson, descargue el paquete pre-construido desde el lanzamiento de GitHub.
wget -L https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.8/OrbbecSDK_v2.4.8_arm64.deb
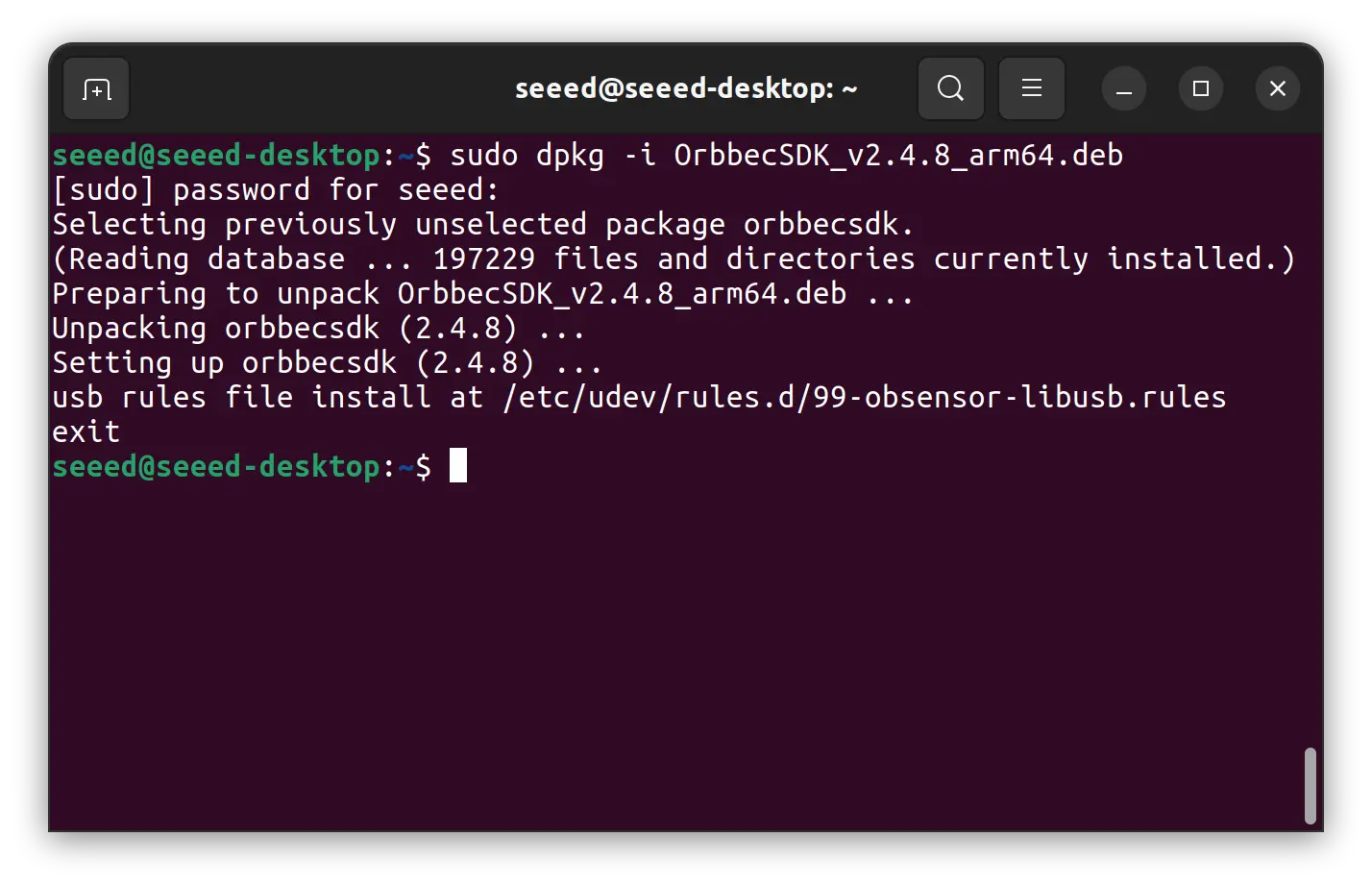
- Instalar SDK
sudo dpkg -i OrbbecSDK_v2.4.8_arm64.deb
- Visualización usando Orbbec Viewer, descargar
wget -L https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.8/OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64.zip
- Extraer el contenido
# En caso de que no haya instalado 'unzip'
# sudo apt-get update && sudo apt-get install unzip
unzip OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64.zip
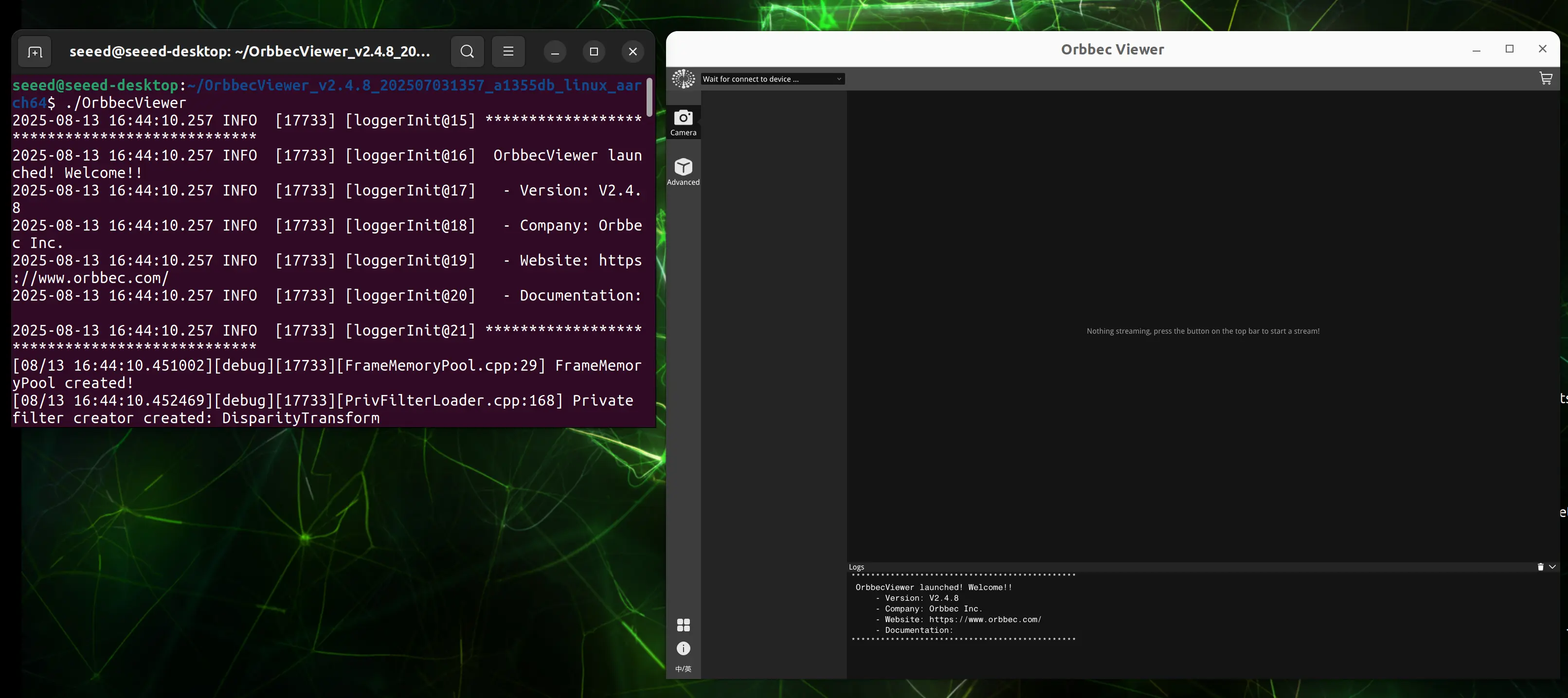
- Ejecutar el Orbbec Viewer
cd OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64
./OrbbecViewer
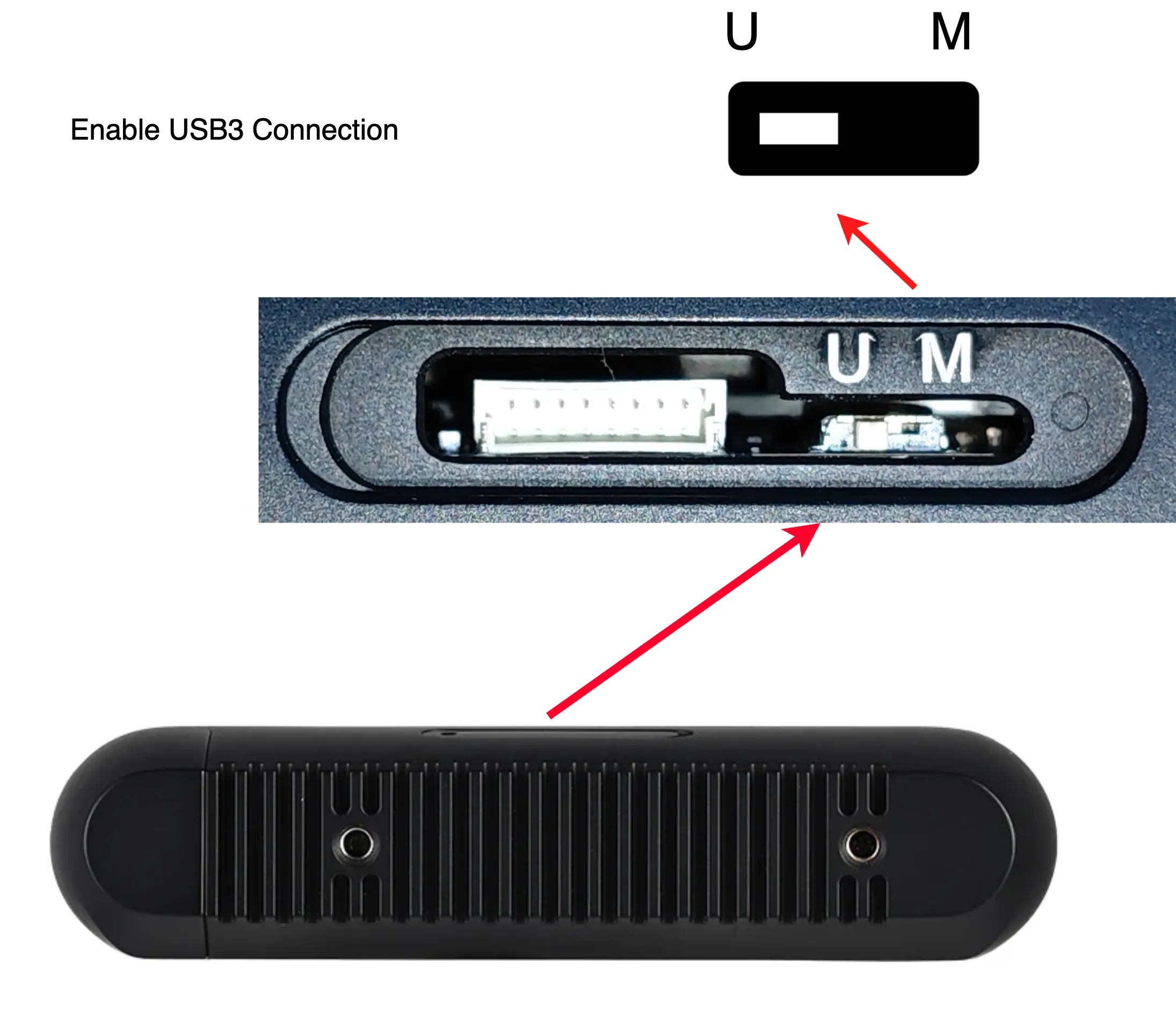
Conexión USB3
Configure el interruptor DIP en la parte superior de la cámara (retire primero la cubierta metálica) a la posición de la letra 'U'.
Lo que podría necesitar:
- Un cable USB Type-C a USB Type A que soporte protocolo USB 3.
- Un dispositivo Jetson host que tenga puertos USB 3 Type A.
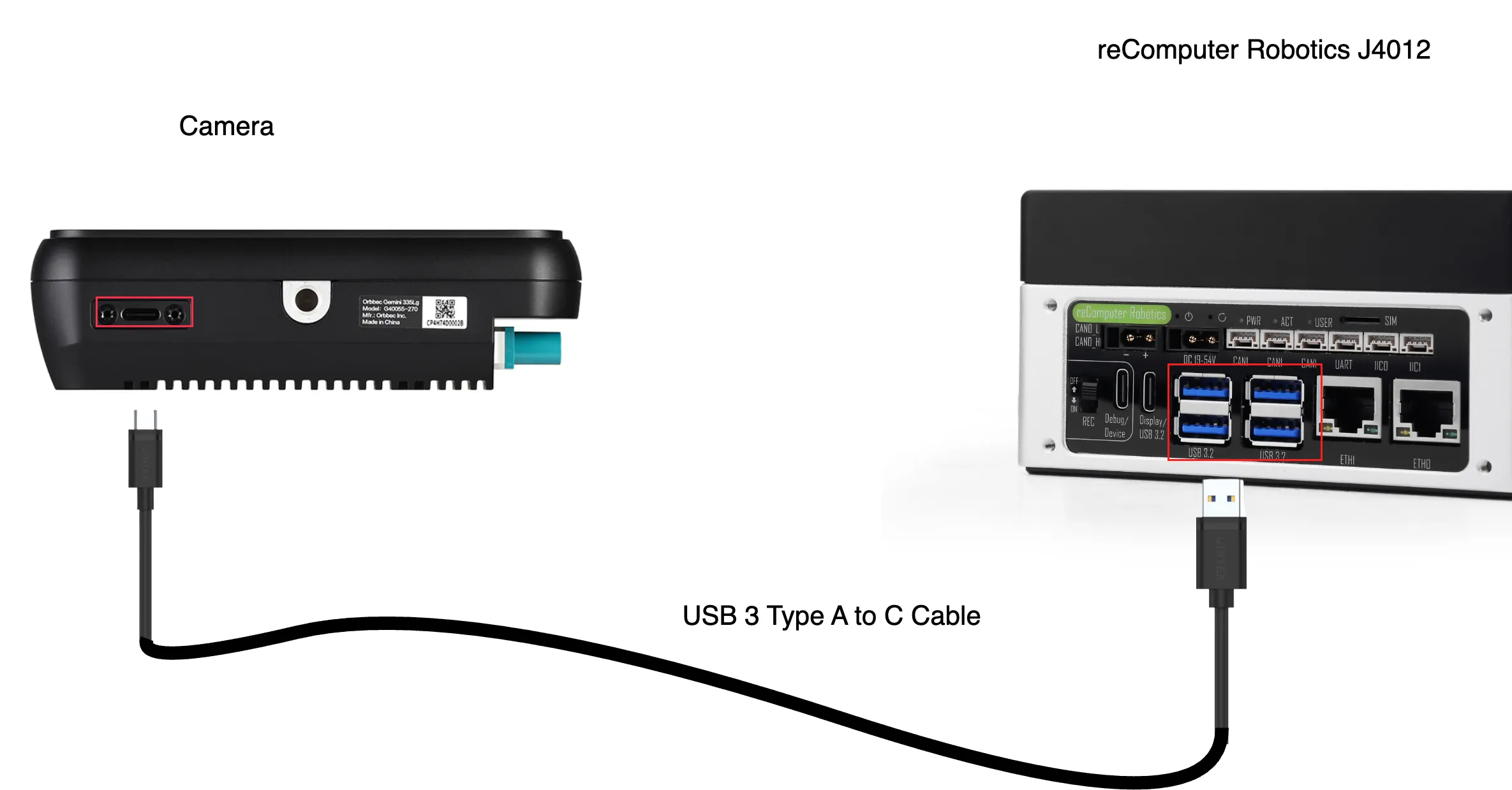
Conecte la cámara y use OrbbecViewer para visualización.
Conexión GMSL2
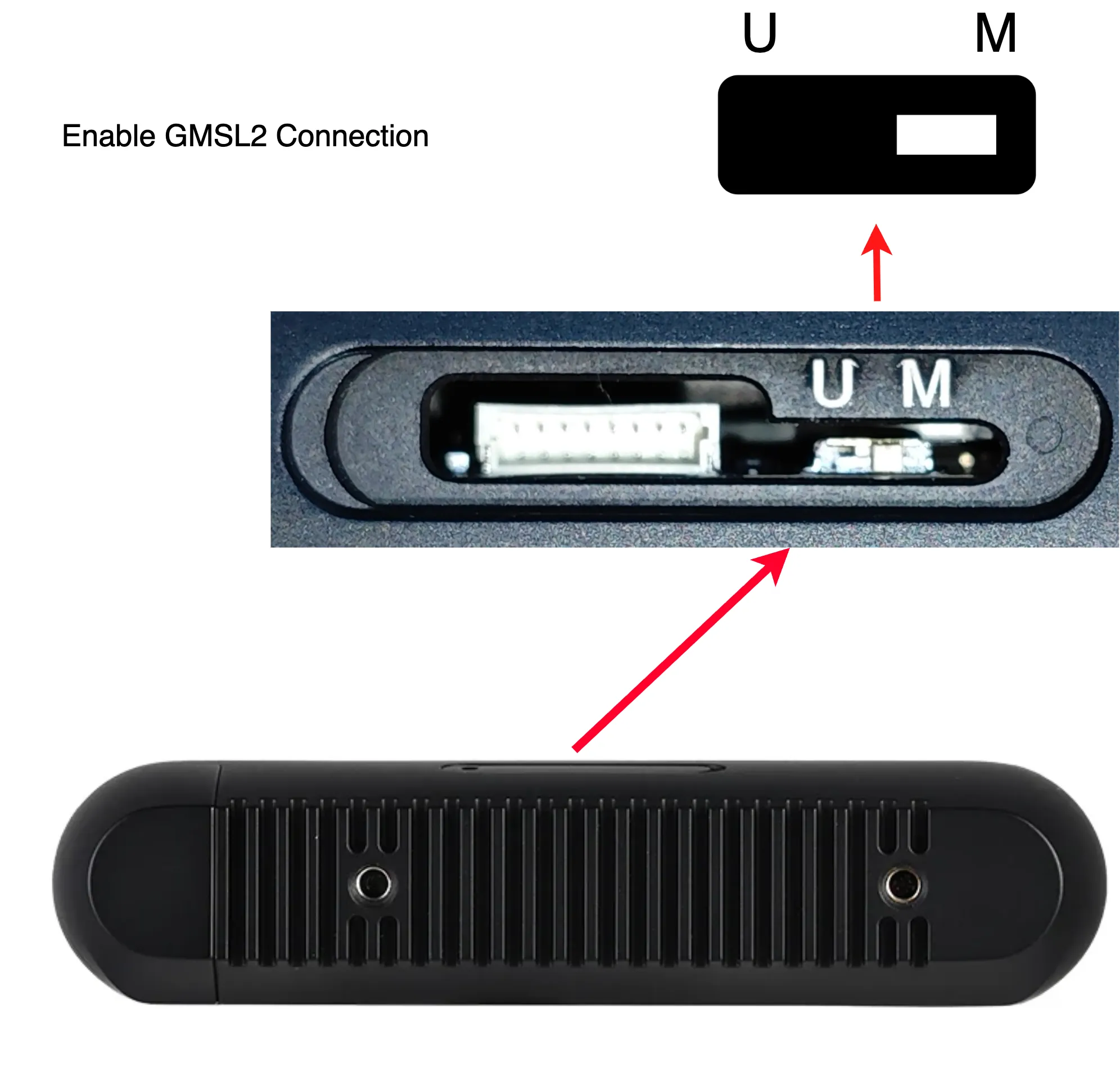
Configure el interruptor DIP en la parte superior de la cámara (retire primero la cubierta metálica) a la posición de la letra 'M'.
Lo que podría necesitar:
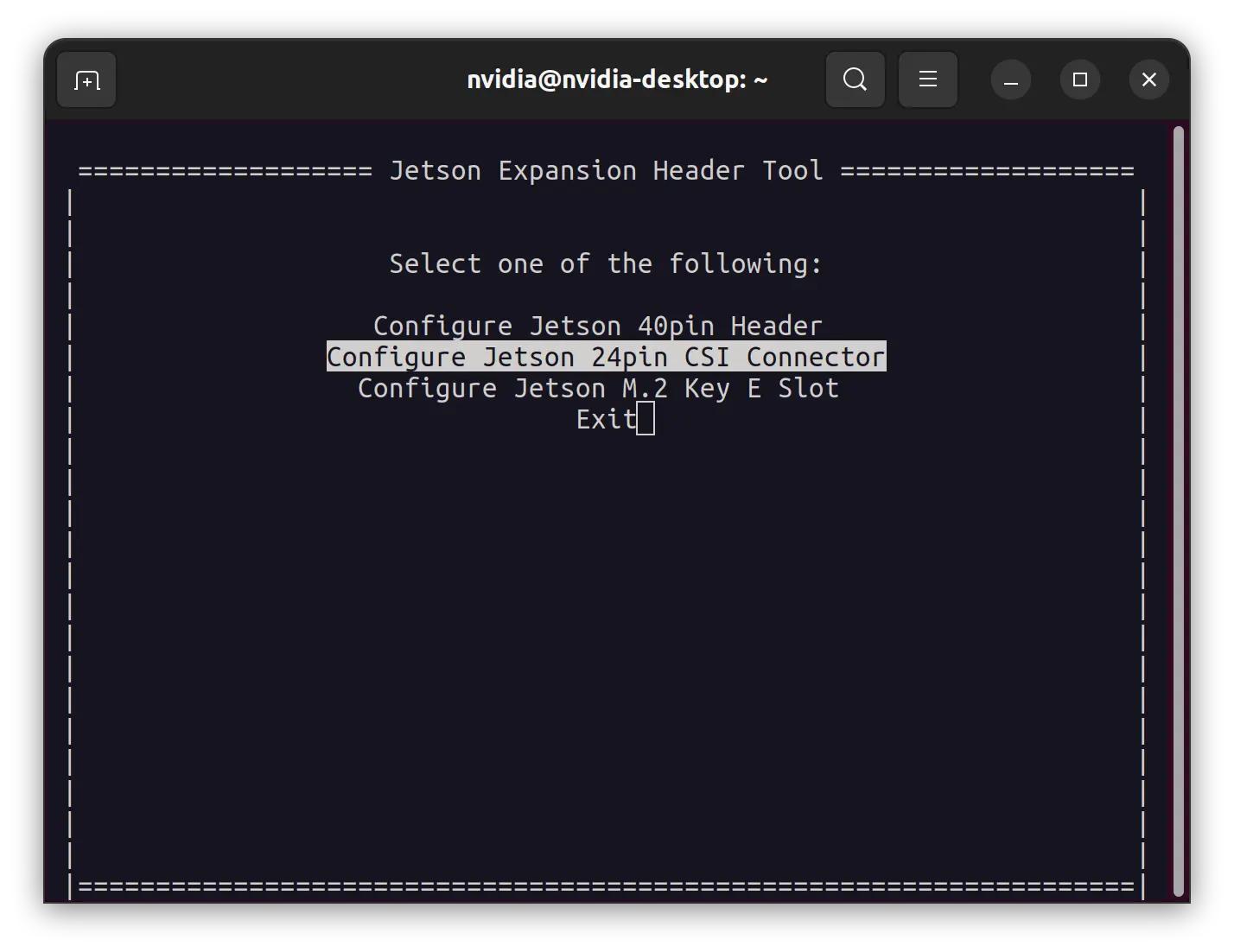
Conecte la cámara y ejecute Jetson IO en su dispositivo con
sudo /opt/nvidia/jetson-io/jetson-io.py
Y configure el overlay del árbol de dispositivos paso a paso:
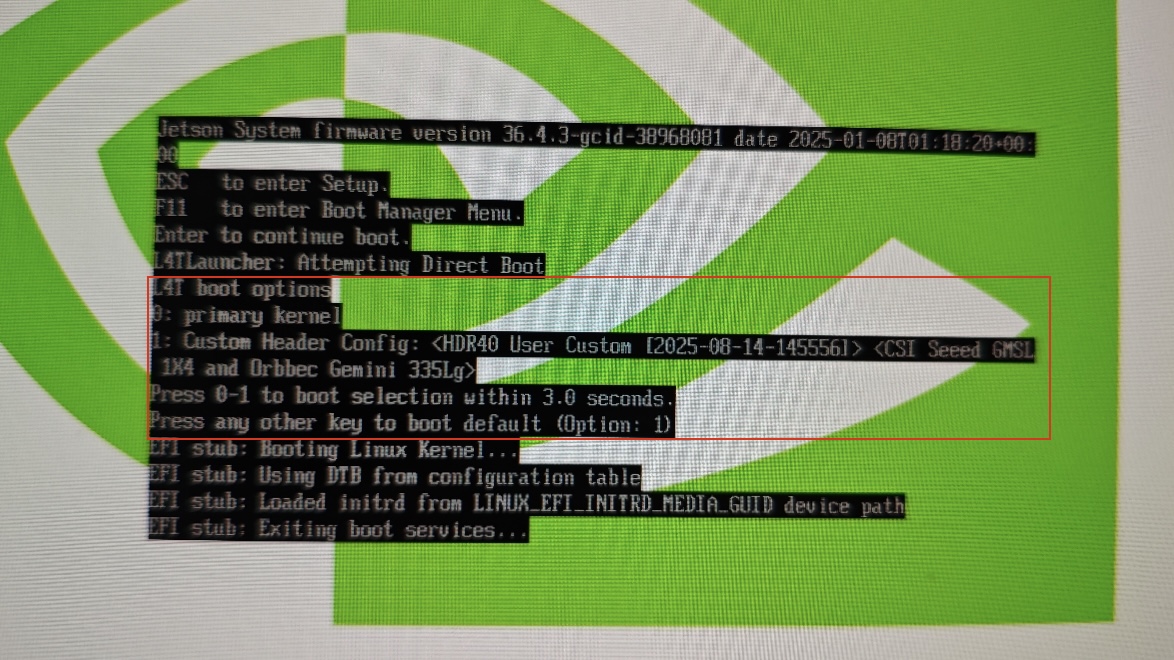
Reinicie el dispositivo Jetson, en la página de Firmware de Jetson, podría necesitar seleccionar la entrada correcta según el prompt, en nuestro caso, presionamos '1' para usar Custom Header Config.
Conecte la cámara con cable Mini FAKRA.

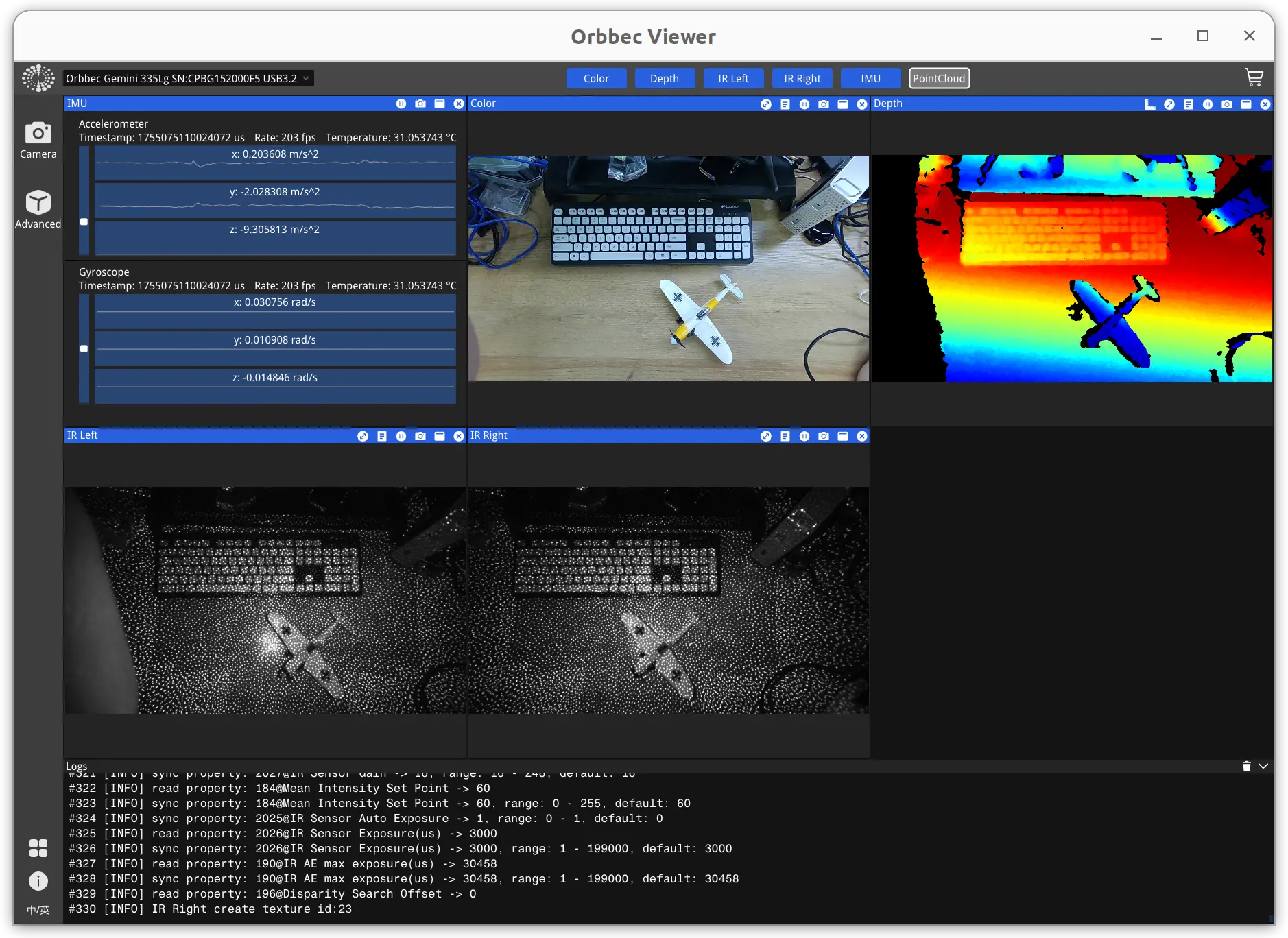
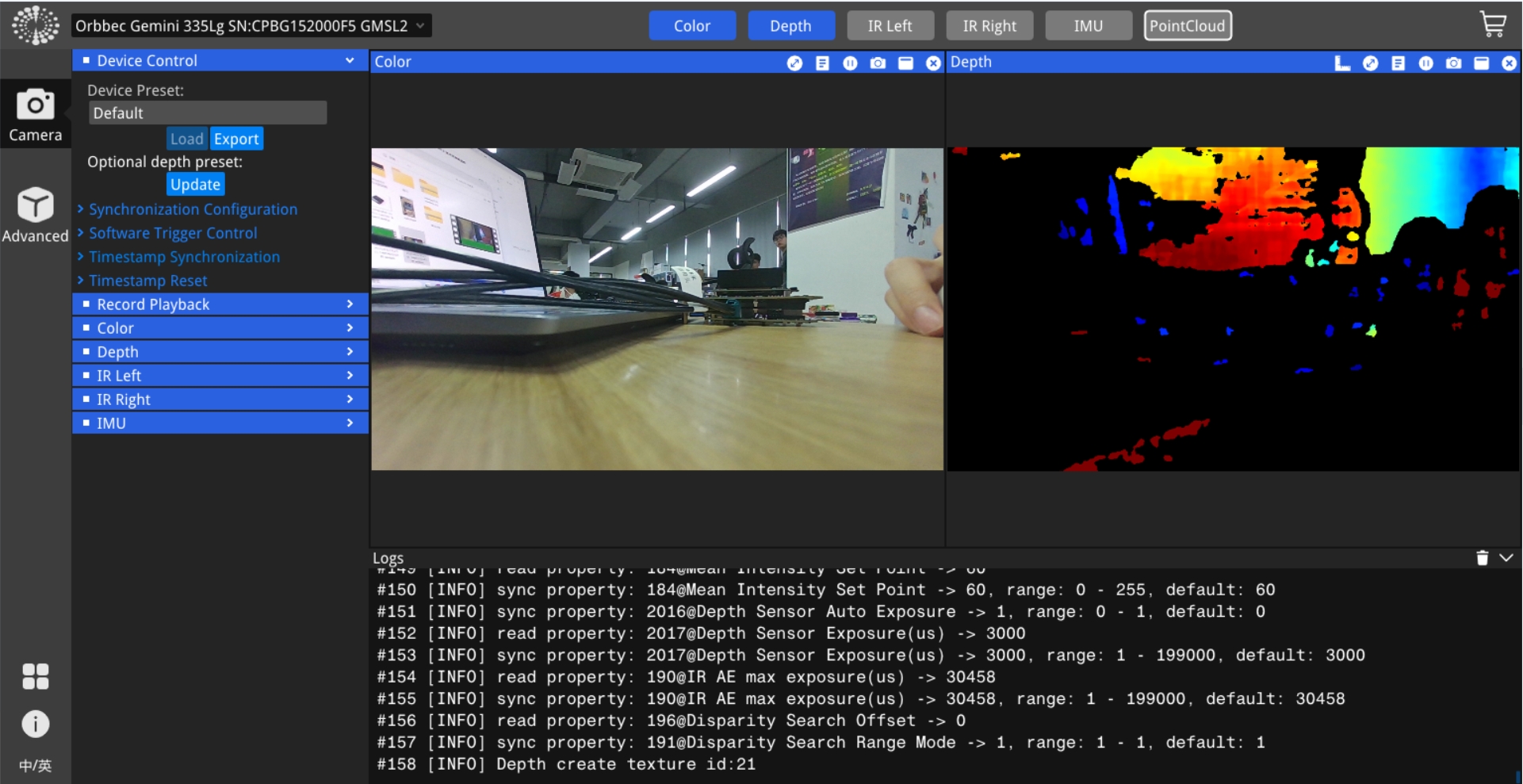
Visualice el resultado usando OrbbecViewer
Recursos Adicionales
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Asegúrese de seguirnos en las plataformas a continuación para obtener las últimas noticias y soporte.
