reTerminal DM CAN BUS con Node-RED
Información breve sobre CAN BUS

CAN BUS y Node-RED
El bus CAN (Controller Area Network bus) es un tipo de red utilizada para conectar múltiples unidades de control electrónico (ECUs) dentro de un vehículo o sistema industrial. Fue desarrollado originalmente por Bosch en la década de 1980 y se ha convertido en un estándar internacional (ISO 11898) para comunicación serie en vehículos y otras aplicaciones.
El bus CAN permite el intercambio de datos de alta velocidad entre ECUs, permitiéndoles compartir información y coordinar sus actividades. Utiliza un sistema de dos cables, con un cable para transmitir datos y el otro para recibir datos, y soporta múltiples nodos, haciéndolo ideal para uso en sistemas complejos donde muchos dispositivos necesitan comunicarse entre sí.
La tecnología de bus CAN es ampliamente utilizada en la industria automotriz para una variedad de aplicaciones, incluyendo control del motor, control de transmisión, ABS (sistema de frenos antibloqueo), control de airbag, y muchas otras. También se utiliza en otras industrias, como automatización industrial, equipos médicos y aeroespacial, donde la comunicación confiable y eficiente entre dispositivos es esencial.
El bus CAN tiene muchas ventajas, incluyendo alta confiabilidad, bajo costo y la capacidad de operar en entornos hostiles. Es fácil de instalar y mantener, y es altamente resistente a la interferencia electromagnética. Estas características lo convierten en una opción ideal para muchas aplicaciones diferentes donde se requiere comunicación confiable y eficiente.
Comenzando con el nodo CAN BUS en reTerminal DM
Para usar Node-RED con bus CAN, necesitarás un dispositivo de interfaz de bus CAN que se conecte al puerto CAN BUS del reTerminal DM, y un nodo de bus CAN de Node-RED que te permita enviar y recibir mensajes en la red, en este caso exploraremos los nodos node-red-contrib-socketcan juntos. Una vez que hayas instalado el nodo de bus CAN en Node-RED, puedes comenzar a construir flujos que lean datos de la red de bus CAN, los procesen y los envíen a otros sistemas o dispositivos. Por ejemplo, puedes leer las RPM del motor desde el bus CAN de un vehículo, procesar los datos para calcular el consumo de combustible y enviar el resultado a un panel de control para su visualización.
Puedes encontrar más información en la página de node-red-contrib-socketcan.
Si estás usando Senscraft Edge OS puedes omitir los pasos de instalación del nodo Socketcan.
Prerrequisitos
Hardware
- 1 x reTerminal DM
- 1 x Computadora Host
- 1 x Analizador USB-CAN
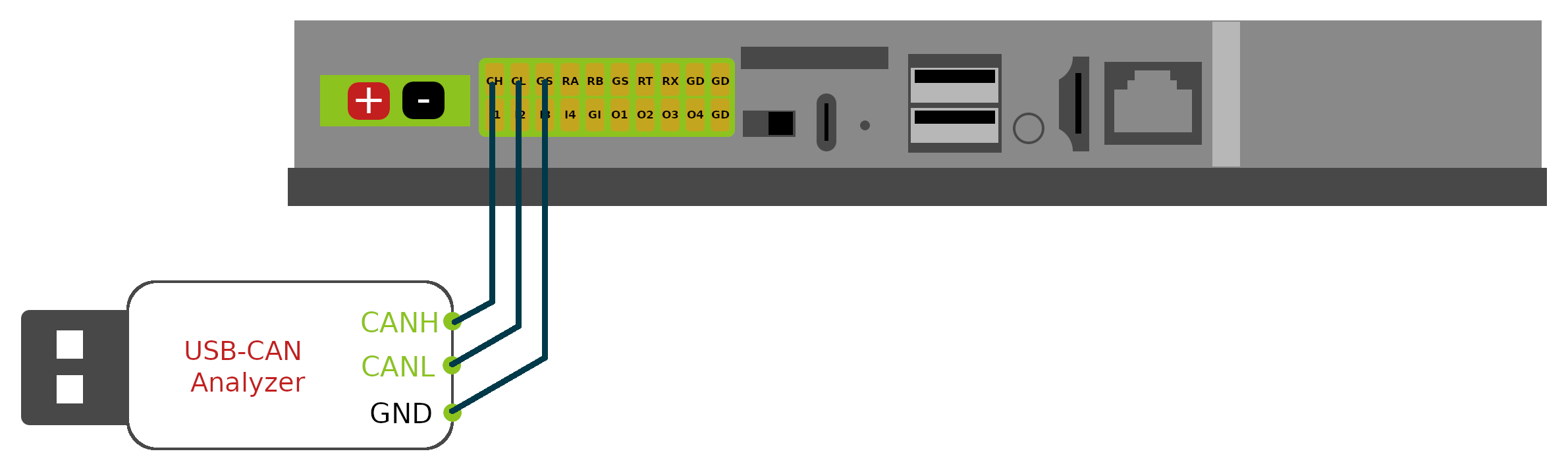
Preparación del hardware
Por favor conecta el Hardware como se muestra a continuación
Software
La computadora host debe poder tener conexión a internet con el reTerminal DM para realizar los siguientes pasos de configuración.
Instalar Nodo Socketcan
En este tutorial de Wiki vamos a usar el nodo node-red-contrib-socketcan, así que por favor instala el node-red-contrib-socketcan siguiendo la guía instalar nodos.
Configurar CAN BUS en reTerminal DM
Se asume que tienes acceso directo a la aplicación Terminal en el reTerminal DM o acceso al reTerminal DM vía SSH. Si no es así, por favor sigue el primer paso aquí para familiarizarte con cómo hacerlo.
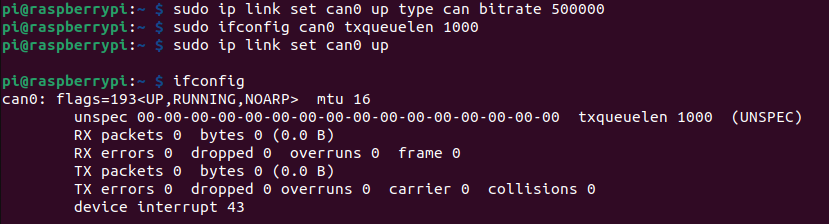
Por favor, ingresa los siguientes comandos uno por uno para habilitar un dispositivo CAN virtual llamado can0 con el puerto CAN BUS en reTerminal DM.
sudo apt install can-utils
sudo ip link set can0 up type can bitrate 250000
sudo ifconfig can0 txqueuelen 1000
sudo ip link set can0 up
Después de ingresar los comandos anteriores, deberías ver el dispositivo can0 con el comando ifconfig como se muestra a continuación:
Configurar el software y controlador usb-can de la computadora host
Si estás utilizando el mismo USB-CAN Analyzer, puedes seguir los pasos a continuación para configurar el controlador de software necesario para usar el analizador.
Por favor visita el repositorio de github del controlador USB-CAN Analyzer Controlador del sistema USB-CAN Analyzer y sigue la sección Readme para instalar el controlador según tu Sistema Operativo.
Los comandos de ejemplo para enviar y recibir tráfico del bus CAN
# dump CAN bus traffic from CAN bus
$ ./canusb -t -d /dev/ttyUSB0 -s 250000 -t
# send the bytes 0x00112233 from ID 005 on at CAN bus
$ ./canusb -d /dev/ttyUSB0 -s 250000 -t -i 5 -j 00112233
Nodo Socketcan con reTerminal DM
Importar los Flujos
Los siguientes pasos son solo con fines de tutorial. En esta sección, te mostraremos cómo importar rápidamente un flujo copiando el flujo en formato JSON y pegándolo en el cuadro de entrada del menú emergente de importación de nodos.
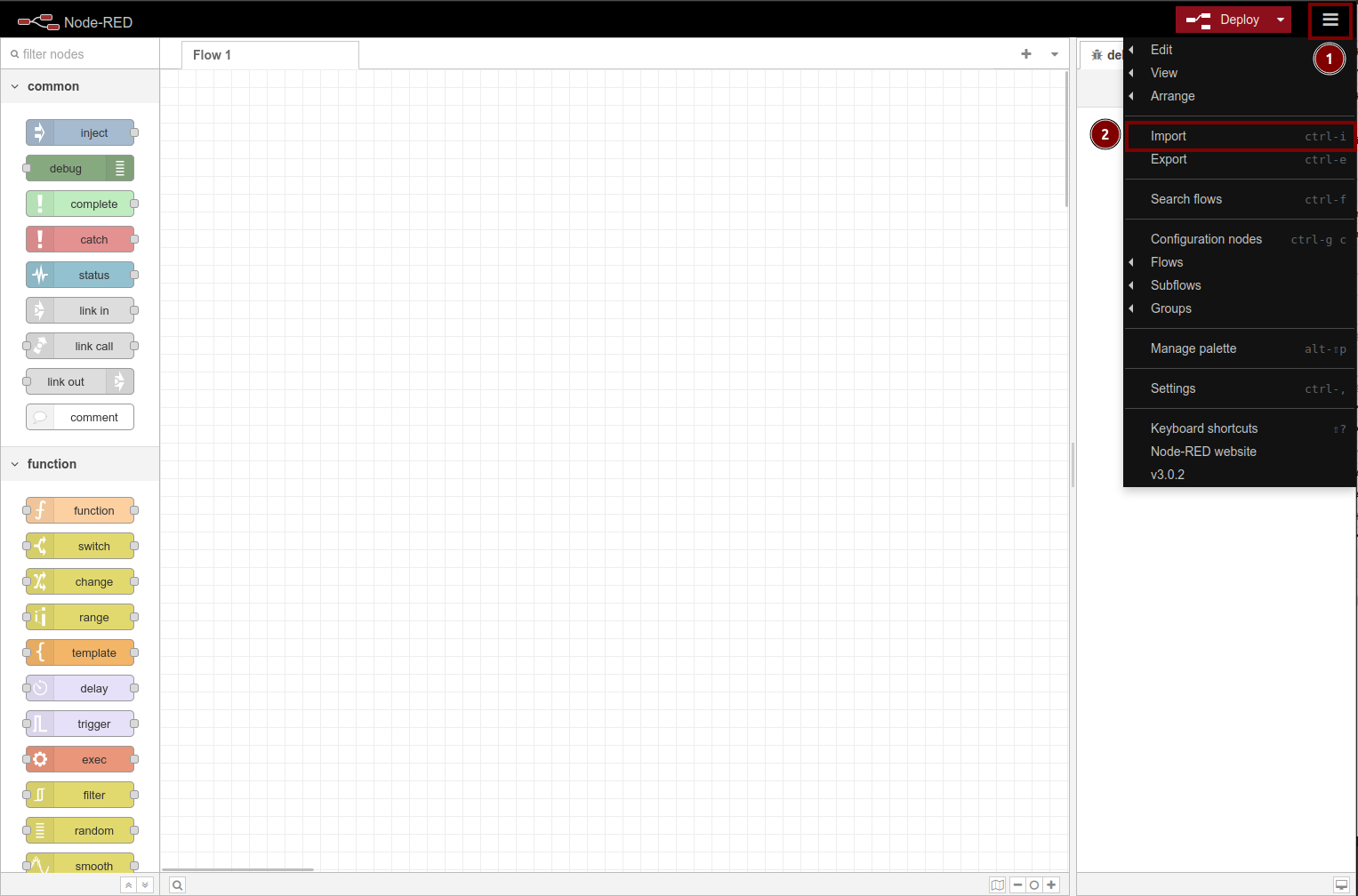
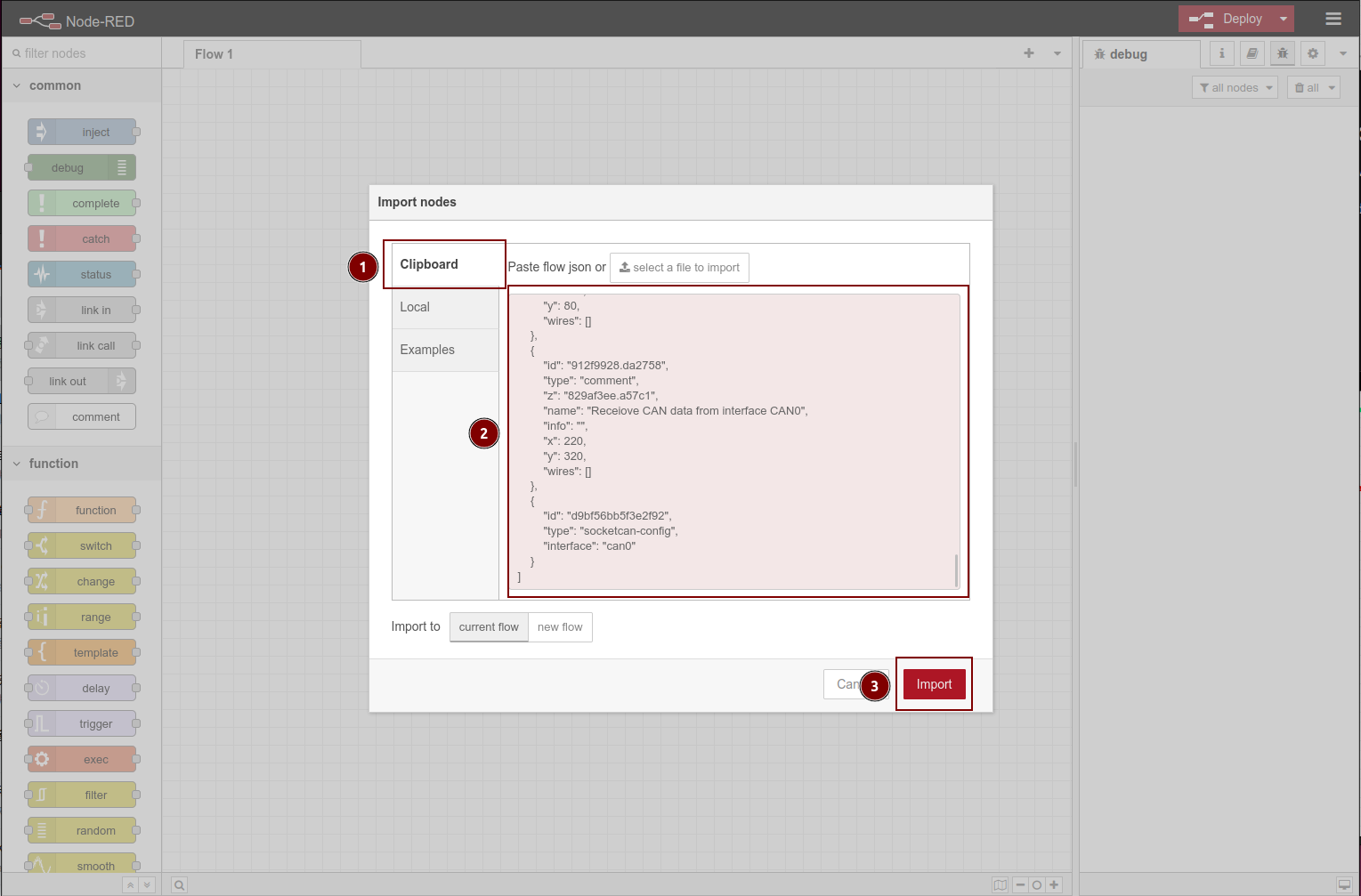
PASO 1: Abre la ventana Import nodes haciendo clic en el Setting Button y luego haciendo clic en el botón Import
PASO 2: copia el siguiente JSON de flujo
[
{
"id": "829af3ee.a57c1",
"type": "tab",
"label": "CAN BUS",
"disabled": false,
"info": ""
},
{
"id": "7b24a62e.8f5458",
"type": "debug",
"z": "829af3ee.a57c1",
"name": "",
"active": true,
"tosidebar": true,
"console": false,
"tostatus": false,
"complete": "false",
"x": 350,
"y": 360,
"wires": []
},
{
"id": "5f671b29.cd24bc",
"type": "socketcan-out",
"z": "829af3ee.a57c1",
"name": "socketcan-out",
"config": "d9bf56bb5f3e2f92",
"x": 150,
"y": 360,
"wires": [
[
"7b24a62e.8f5458"
]
]
},
{
"id": "caba412f.047b2",
"type": "socketcan-in",
"z": "829af3ee.a57c1",
"name": "socketcan-in",
"config": "d9bf56bb5f3e2f92",
"x": 350,
"y": 120,
"wires": []
},
{
"id": "a64240cb.3f0788",
"type": "inject",
"z": "829af3ee.a57c1",
"name": "Send object - std",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "{\"ext\":false,\"canid\":123,\"dlc\":5,\"data\":[1,2,3,4,5]}",
"payloadType": "json",
"x": 160,
"y": 120,
"wires": [
[
"caba412f.047b2"
]
]
},
{
"id": "3ff96369.ef6f5c",
"type": "inject",
"z": "829af3ee.a57c1",
"name": "Send string - std",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "123#00112233",
"payloadType": "str",
"x": 160,
"y": 200,
"wires": [
[
"caba412f.047b2"
]
]
},
{
"id": "6879c00a.5edb68",
"type": "inject",
"z": "829af3ee.a57c1",
"name": "Send string - ext",
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "1F334455#1122334455667788",
"payloadType": "str",
"x": 160,
"y": 240,
"wires": [
[
"caba412f.047b2"
]
]
},
{
"id": "1ee3b274.4cb8fe",
"type": "inject",
"z": "829af3ee.a57c1",
"name": "Send object - ext",
"props": [
{
"p": "payload"
},
{
"p": "topic",
"vt": "str"
}
],
"repeat": "",
"crontab": "",
"once": false,
"onceDelay": 0.1,
"topic": "",
"payload": "{\"ext\":true,\"canid\":32278,\"dlc\":5,\"data\":[1,2,3,4,5]}",
"payloadType": "json",
"x": 160,
"y": 160,
"wires": [
[
"caba412f.047b2"
]
]
},
{
"id": "391a4c45.7acd8c",
"type": "comment",
"z": "829af3ee.a57c1",
"name": "Send CAN frames in using different payloads on CAN0",
"info": "",
"x": 260,
"y": 80,
"wires": []
},
{
"id": "912f9928.da2758",
"type": "comment",
"z": "829af3ee.a57c1",
"name": "Receiove CAN data from interface CAN0",
"info": "",
"x": 220,
"y": 320,
"wires": []
},
{
"id": "d9bf56bb5f3e2f92",
"type": "socketcan-config",
"interface": "can0"
}
]
PASO 3: En la ventana Import nodes, por favor selecciona la pestaña Clipboard y luego pega el código de flujo json anterior en el cuadro de diálogo rojo, después haz clic en el botón import.
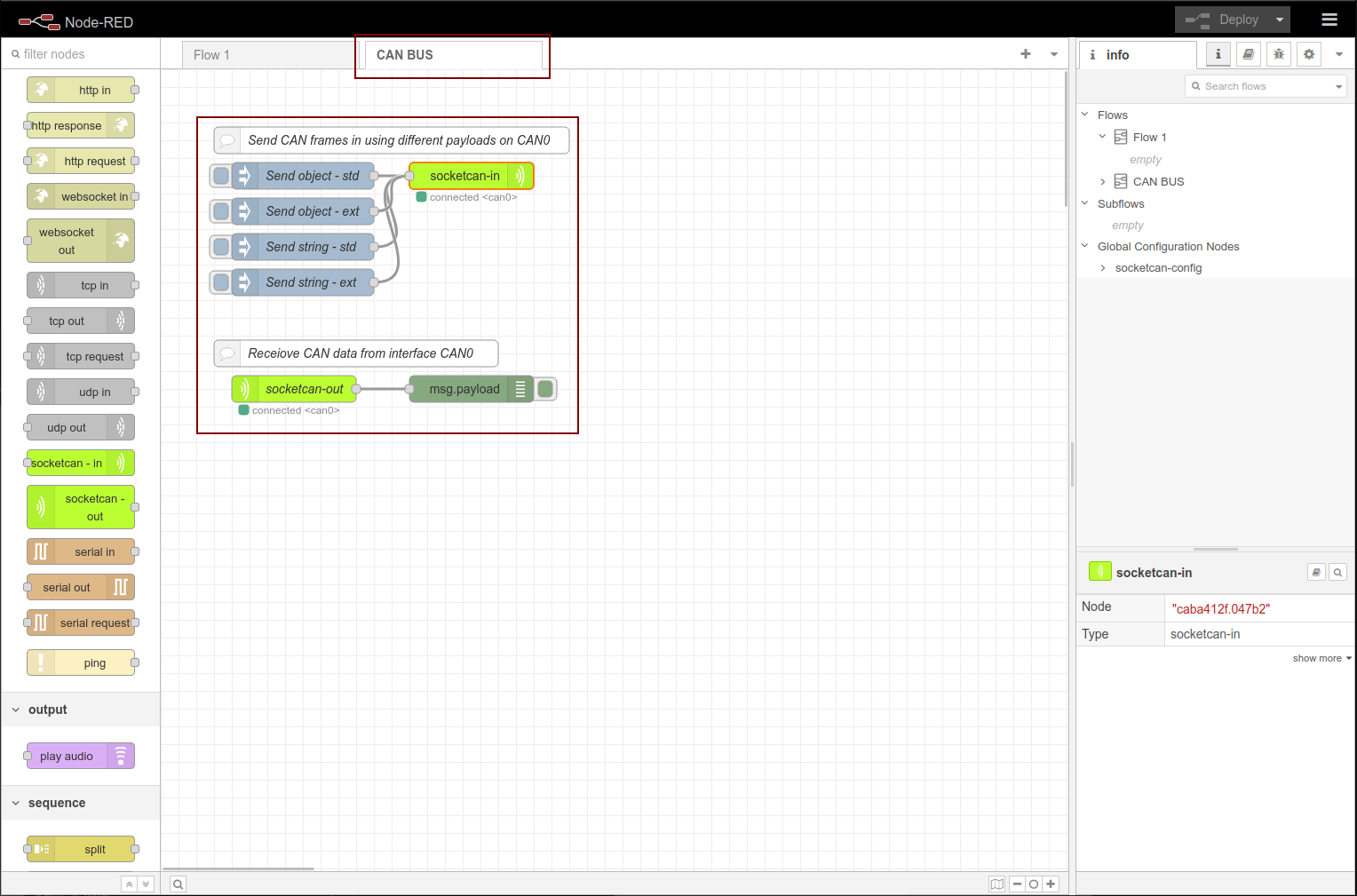
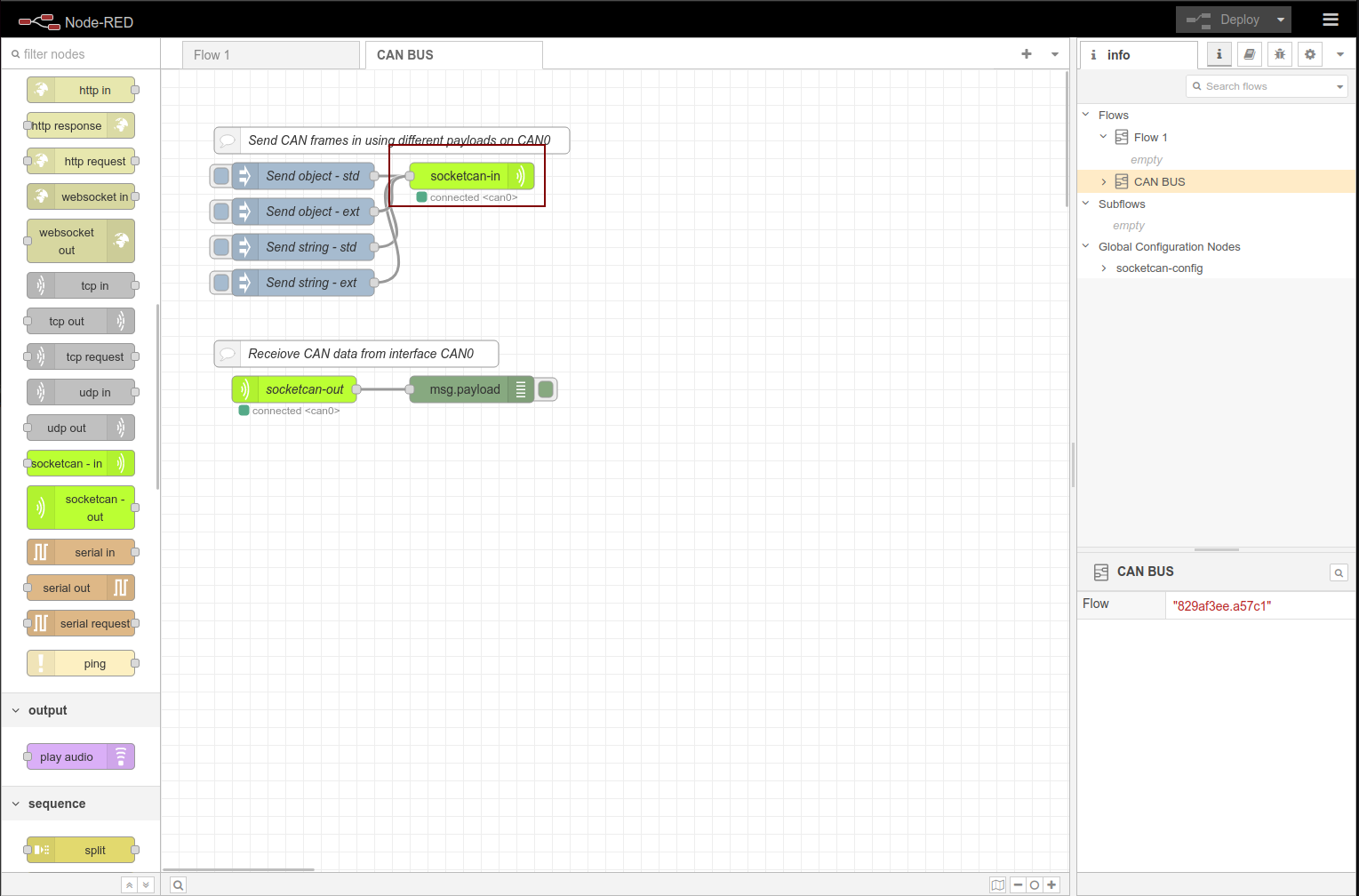
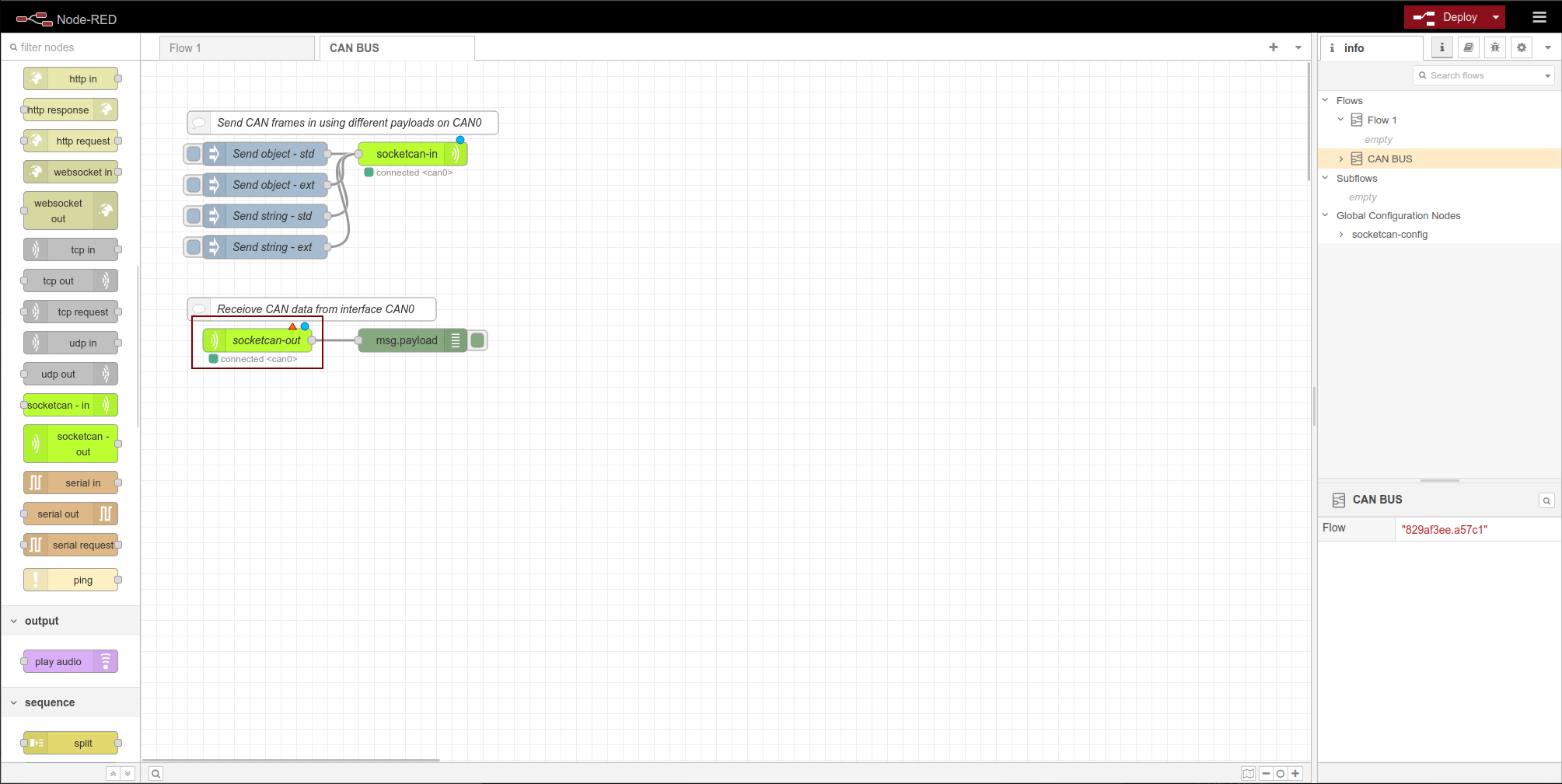
PASO 4: Deberías ver una nueva pestaña de flujo llamada CAN BUS creada después de los pasos anteriores, y por favor verifica si el flujo es el mismo que se muestra a continuación
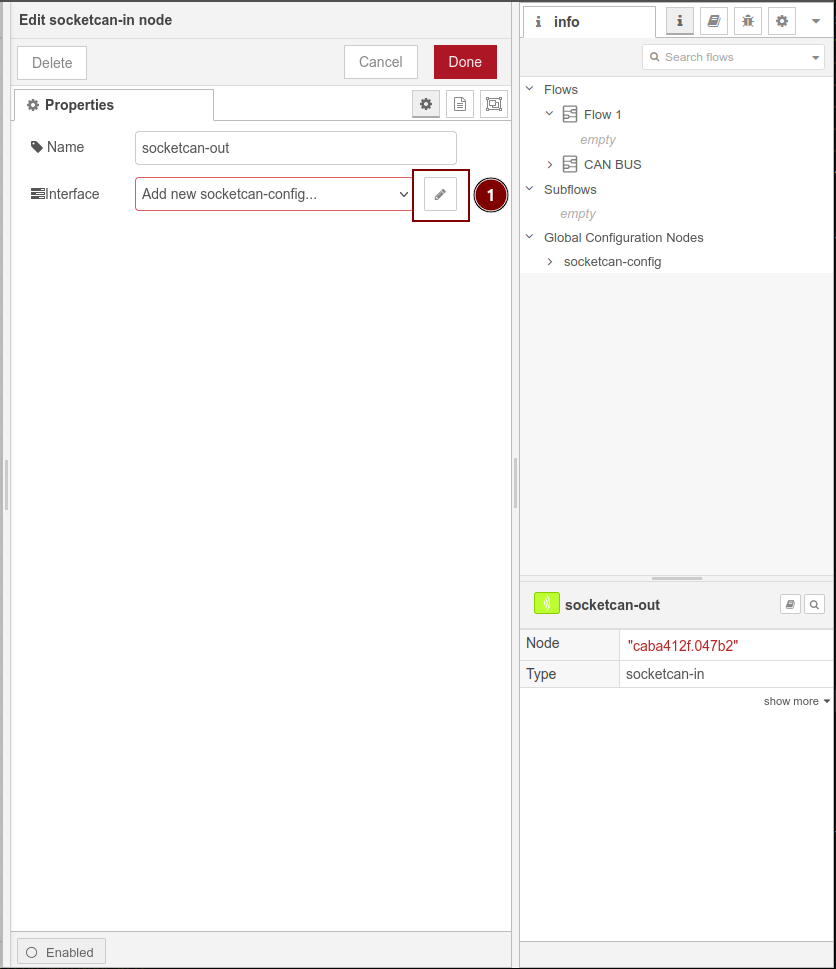
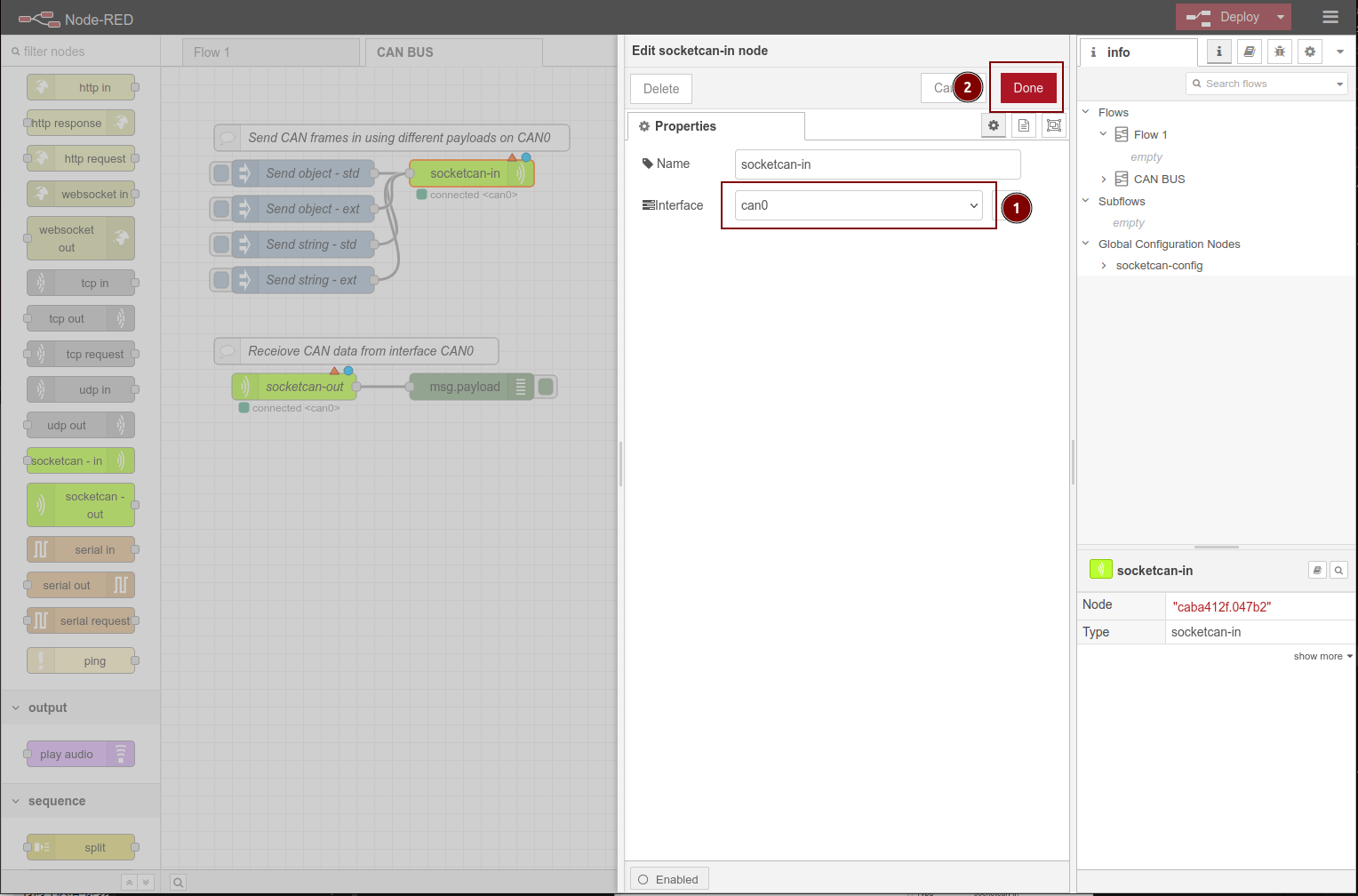
PASO 5: para configurar la interfaz can, necesitarás hacer doble clic en el socketcan-in node para abrir la ventana edit node.
Asegúrate de haber completado el paso en la sección Configurar CAN BUS en reTerminal DM para crear un dispositivo de interfaz can0 en el reTerminal DM.
PASO 6: En la ventana Edit socketcan-in node haz clic en el icono de lápiz en la opción interface para abrir la ventana Add new socketcan-config config node
PASO 7: En la ventana Add new socketcan-config config node por favor ingresa can0 en el cuadro de diálogo de interfaz
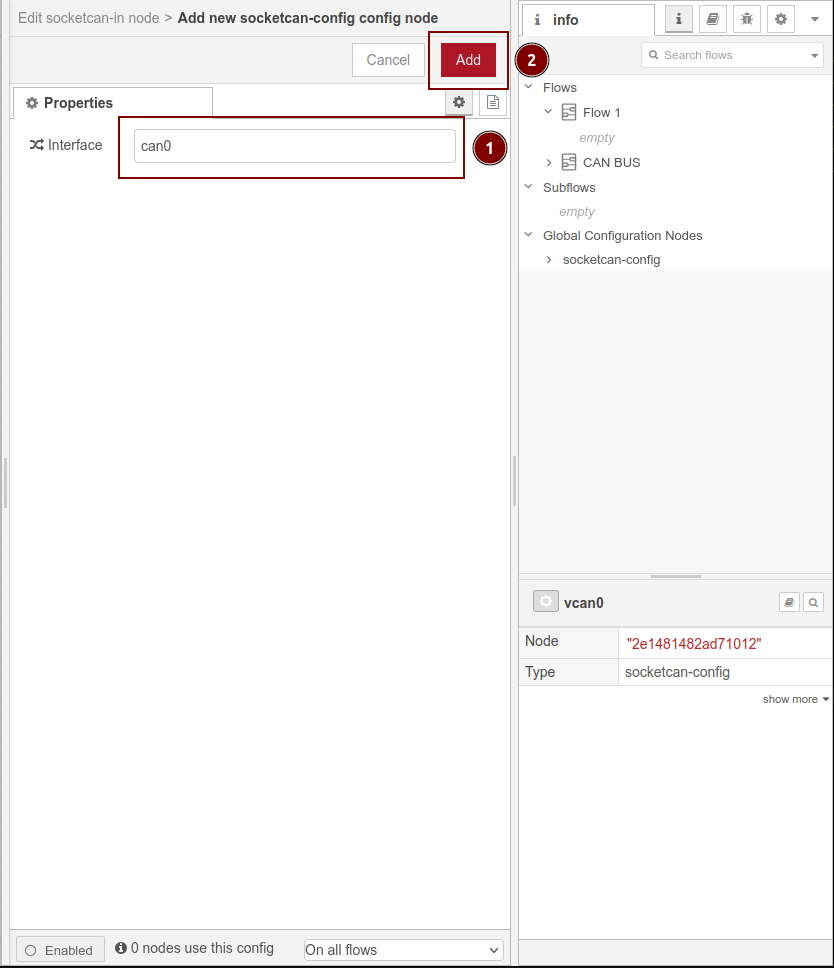
PASO 8: una vez que hayas hecho clic en el botón Add de los pasos anteriores deberías ver que la interface está configurada como can0 y luego haz clic en Done para aplicar.
PASO 9: configura la interfaz CAN Bus para socketcan-out, que solo necesita hacer doble clic en el nodo scoketcan-out y seleccionar can0 para Config, luego haz clic en Done
PASO 10: Por favor haz clic en Deploy ahora
Prueba Final y Resultado
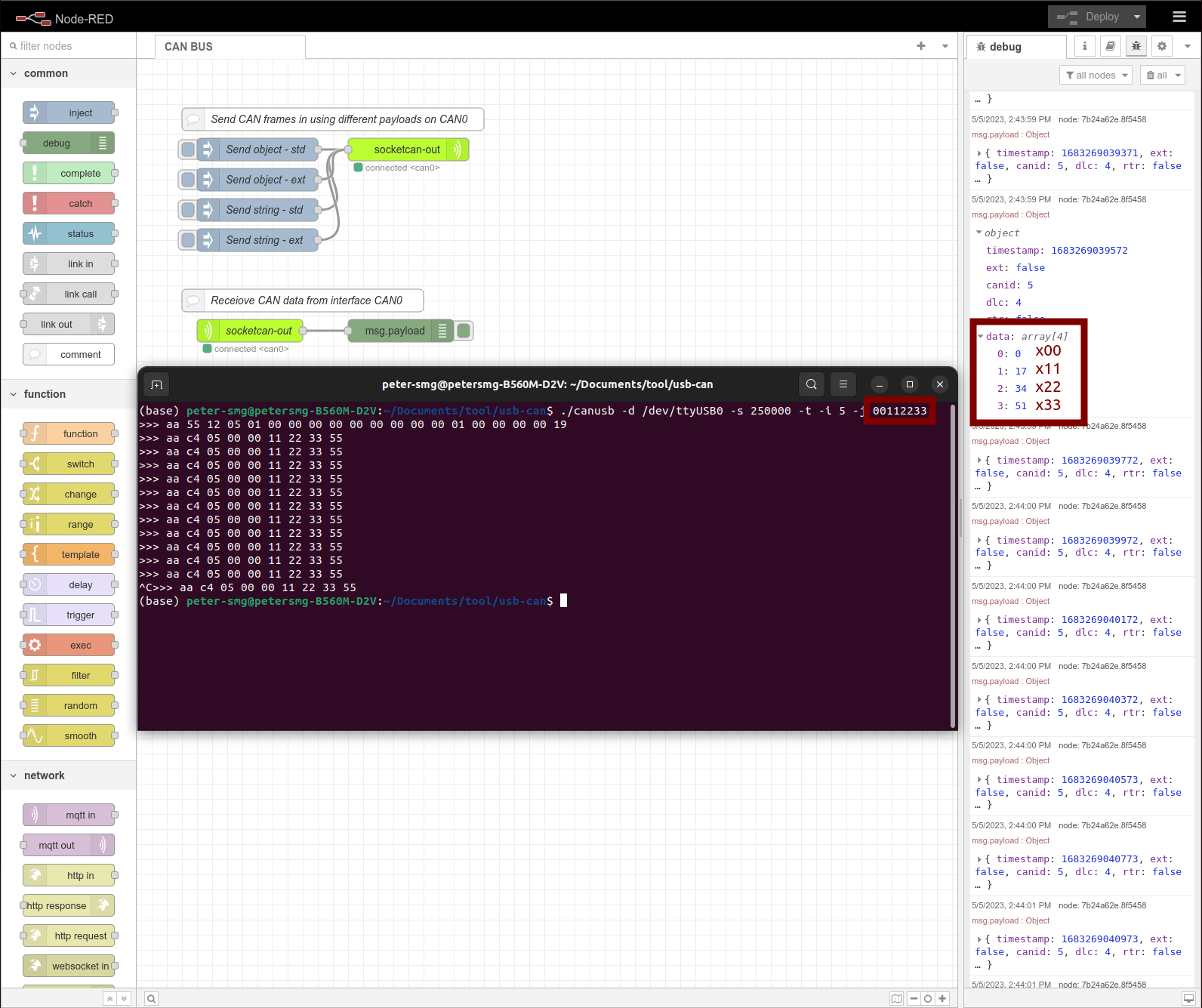
Felicitaciones, has experimentado y aprendido exitosamente cómo usar el protocolo CAN Bus con reTerminal DM y node-RED ahora, tus resultados finales deberían ser similares a la imagen mostrada a continuación
Para que la Computadora Host Envíe datos CAN Bus y reTerminal DM Reciba:
- Así que desde la ventana de terminal de la Computadora Host puedes ejecutar el comando
./canusb -d /dev/ttyUSB0 -s 250000 -t -i 5 -j 00112233para enviar00112233(en hex) al reTerminal DM, y desde la ventana de depuración del reTerminal DM puedes ver que los datos son
0: 0
1: 17
2: 34
3: 51
donde es la representación binaria del conjunto de datos HEX x00 x11 x22 x33.
Para que la Computadora Host Reciba datos del Bus CAN y el reTerminal DM Envíe:
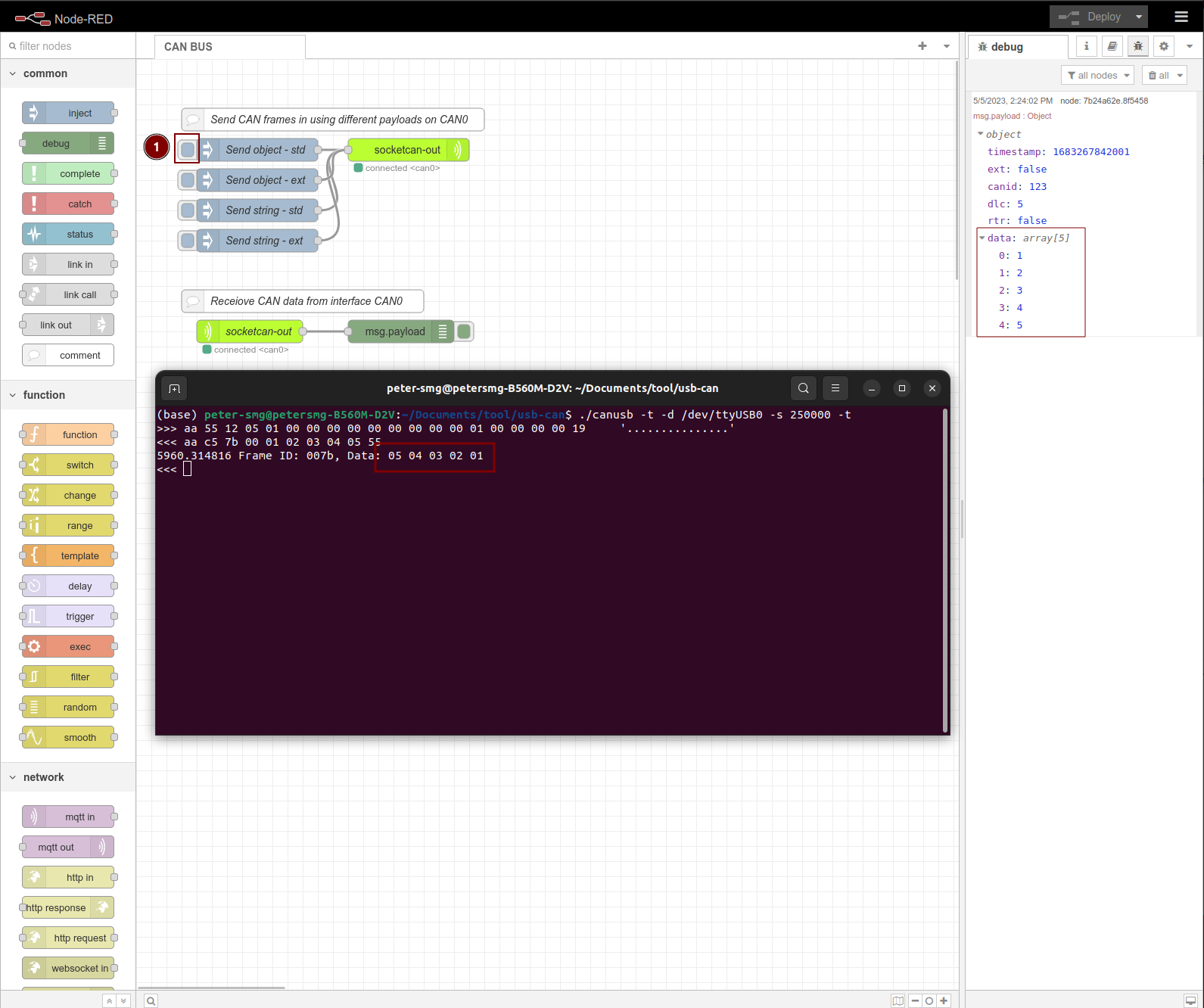
- Necesitarás hacer clic en el botón
injecten el reTerminal DM Node-Red como se muestra en la imagen a continuación para enviar los datos01 02 03 04 05a la Computadora Host, y como puedes ver en la ventana del terminal de la computadora host el comando para recibir es./canusb -t -d /dev/ttyUSB0 -s 250000 -t, los datos recibidos son05 04 03 02 01ya que están en orden de primero en entrar, primero en salir:
Explora más nodos en reTerminal DM con node-RED
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarte diferentes tipos de soporte para asegurar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para satisfacer diferentes preferencias y necesidades.