Uso de Hardware e Interfaces
Este wiki presenta los diversos hardware e interfaces diferentes en el reTerminal y cómo usarlos para expandir las ideas de tu proyecto.
Nota: Para algunos hardware e interfaces, las instrucciones de uso serán diferentes entre sí cuando se ejecute la imagen de Raspberry Pi OS, la imagen Buildroot y la imagen Yocto. Los pasos predeterminados serán para la imagen de Raspberry Pi OS. Sin embargo, si las instrucciones para la imagen Buildroot y la imagen Yocto son diferentes, se indican claramente.
Descripción General del Hardware


Pines Compatibles con Raspberry Pi de 40 Pines

Los 40 pines consisten en 26 GPIO, hasta 5 × I2C, hasta 5 × SPI, hasta 5 × UART, 1 x PCM, 1 x PWM, 1 × interfaz SDIO, 1 × DPI (Pantalla RGB Paralela), hasta 3× salidas GPCLK y 1 interfaz USB.
La interfaz USB se extiende desde la interfaz USB 2.0 interna en el Compute Module 4. Así que puedes expandir a aún más conectores USB y obtener velocidades de hasta 480 Mbit/s usando esta interfaz.
¡También puedes usar estos 40 pines para conectar a Hats compatibles con Raspberry Pi y expandir tus proyectos!
Visita aquí para explorar una amplia gama de Hats de Raspberry Pi ofrecidos por Seeed Studio y visita aquí para ver aún más Hats de Raspberry Pi de terceros!
Los pines GPIO pueden extraer una corriente máxima de 50mA de forma segura. Esto significa 50mA distribuidos a través de todos los pines. Por lo tanto, un pin GPIO individual solo puede extraer de forma segura 16mA de corriente. Por otro lado, la extracción máxima de corriente para cada uno de los pines restantes es 2A. Ten esto en cuenta cuando conectes hardware adicional a estos pines.
Esquemas
Consejo: Haz clic aquí para una imagen de mayor resolución
Uso - GPIO
- Paso 1. Configurar pin como GPIO
sudo -i #enable root account privileges
cd /sys/class/gpio
echo 23 > export #GPIO23 which is Pin 16
cd gpio23
- Paso 2. Configurar entrada/salida de GPIO
echo in > direction #set GPIO as input
echo out > direction #set GPIO as output
- Paso 3. Establecer nivel alto/bajo de GPIO
echo 1 > value #set GPIO to high
echo 0 > value #set GPIO to low
- Paso 4. Obtener el estado de entrada/salida de GPIO
cat direction
- Paso 5. Obtener el estado del nivel GPIO
cat value
- Paso 6. Restablecer el pin a su valor predeterminado
cd ..
echo 23 > unexport
Uso en imagen Buildroot
- Reemplaza sudo -i con su - para habilitar los privilegios de cuenta root
- Sigue los otros pasos como se mencionó anteriormente
Uso en imagen Yocto
- sudo -i no es necesario porque ya iniciamos sesión como root
- Sigue los otros pasos como se mencionó anteriormente
Uso - I2C
-
Paso 1. Enciende el reTerminal, haz clic en el icono de Raspberry Pi en la interfaz de escritorio de Raspberry Pi y navega a
Preferences > Raspberry Pi Configuration -
Paso 2. Haz clic en la pestaña
Interfacesy haz clic en Enabled que está junto a I2C

-
Paso 3. Haz clic en OK
-
Paso 4. Conecta un dispositivo I2C al reTerminal
-
Paso 5. Lista todos los buses I2C disponibles
i2cdetect -l

- Paso 6. Escanea las direcciones estándar en el bus I2C 1 (i2c-1)
i2cdetect -y 1
Nota 1 representa el número del bus I2C

La imagen anterior muestra dispositivos I2C detectados con direcciones 0x20, 0x51, 0x45, 0x19, 0x29 y 0x5c
Uso en imagen Buildroot
- No necesitas activar I2C para la imagen Buildroot porque I2C está habilitado por defecto
- Sigue los otros pasos como se mencionó anteriormente
Uso en imagen Yocto
- I2C no está habilitado cuando se enciende. Solo funciona con modprobe i2c-dev después de cada arranque. Esto se actualizará una vez que se solucione.
Uso - SPI
-
Paso 1. Enciende el reTerminal, haz clic en el icono de Raspberry Pi en la interfaz de escritorio de Raspberry Pi y navega a
Preferences > Raspberry Pi Configuration -
Paso 2. Haz clic en la pestaña
Interfacesy haz clic en Enabled que está junto a SPI

-
Paso 3. Conecta un dispositivo SPI al reTerminal
-
Paso 4. Lista todos los dispositivos SPI disponibles
ls /dev/spi*
Verás la siguiente salida

- Paso 5. Abre una ventana de terminal y escribe lo siguiente para descargar una herramienta de prueba SPI
wget https://files.seeedstudio.com/wiki/102110497/spidev_test
- Paso 6. Cambiar los derechos de usuario de la herramienta
chmod +x spidev_test
- Paso 7. Cortocircuita GPIO 10 (Pin 19) y GPIO 9 (Pin 21) usando un cable puente
Nota: Aquí cortocircuitamos los pines MOSI y MISO
- Paso 8. Ejecuta la siguiente herramienta de prueba SPI
./spidev_test -D /dev/spidev0.0 -v -p hello
Si ves la siguiente salida, SPI está funcionando correctamente

Uso en imagen Buildroot/ Yocto
- Para activar SPI, abre config.txt con el comando vi /boot/config.txt
- Añade dtparam=spi=on al final (presiona i para entrar en modo de edición)
- Presiona ESC para salir del modo de edición
- Guarda el archivo escribiendo :wq
- Reinicia
- La herramienta spidev_test tiene problemas al ejecutarse. Esto se actualizará una vez que se solucione.
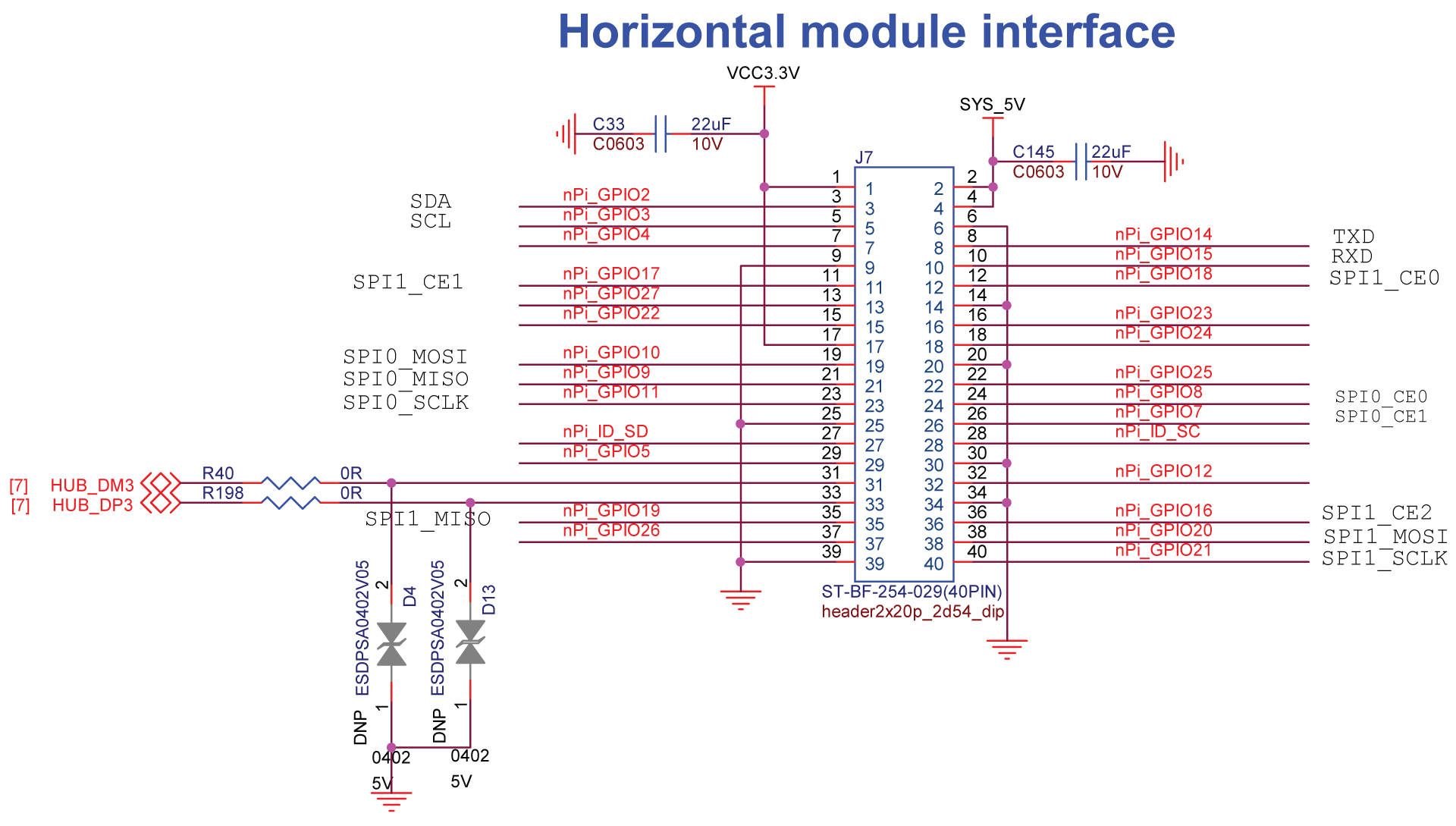
Interfaz de Alta Velocidad para Módulos de Expansión
Hay una interfaz de expansión de alta velocidad en la parte trasera del reTerminal. Consiste en 1 PCIe 1-lane Host Gen 2 (soportando velocidades de hasta 5Gbps), 1 USB 2.0, 1 PoE y 26 GPIOs. Los 26 pines GPIO pueden usarse además como 2 I2C, 2 SPI y 1 UART.

Consejo: Haz clic aquí para una imagen de mayor resolución
Las interfaces PCIe, USB 3.0, 2 x CAN-FD y SDIO3.0 están definidas para productos futuros y por lo tanto no son utilizables en este momento
Planeamos construir módulos de expansión en el futuro para reTerminal y hemos reservado esta interfaz para conectar estos módulos al reTerminal. Lanzaremos una amplia gama de módulos como:
- Módulo de Array de Micrófono y Altavoz
- Módulo de Cámara
- E/S Industrial
- Módulo LoraWAN
- Módulo 5G/4G
- Módulo PoE
- Switch Ethernet

Hay 2 orificios de tornillo mecánico M4 en el lateral del reTerminal para ayudar a mantener los módulos de expansión en su lugar.
Interfaz de Cámara CSI
reTerminal tiene una interfaz de cámara MIPI CSI de 2 carriles, lo que significa que puedes conectar hasta 2 cámaras al reTerminal. Una interfaz tiene 15 pines mientras que la otra interfaz tiene 22 pines. Así que asegúrate de usar el cable flexible correcto correspondiente a la interfaz que pretendes usar. Estas interfaces de cámara pueden usarse para detección de objetos y aplicaciones de aprendizaje automático.
Esquemas

Consejo: Haz clic aquí para una imagen de mayor resolución
Uso
- Paso 1. Conecta una cámara a la interfaz FPC de 15 pines o 22 pines

-
Paso 2. Enciende el reTerminal, haz clic en el icono de Raspberry Pi en la interfaz de escritorio de Raspberry Pi y navega a
Preferences > Raspberry Pi Configuration -
Paso 3. Haz clic en la pestaña
Interfacesy haz clic en Enabled que está junto a Camera

- Paso 4. Haz clic en Yes para reiniciar

- Paso 5. Abre una ventana de terminal y escribe lo siguiente para tomar una foto fija y guardarla en el Escritorio
raspistill -o Desktop/image.jpg
Nota: Puedes cambiar la ubicación de guardado según tu preferencia
-
Paso 6. Haz doble clic en el archivo generado en el Escritorio para ver la imagen
-
Paso 7. Escribe lo siguiente para grabar un video y guardarlo en el Escritorio
raspivid -o Desktop/video.h264
- Paso 8. Haz doble clic en el archivo generado en el Escritorio para reproducir el video grabado
Puedes aprender más sobre el uso de la cámara visitando la documentación oficial de Raspberry Pi
Uso en imagen Buildroot/ Yocto
- La interfaz de cámara CSI aún no ha sido probada. Esto se actualizará una vez que sea probada.
LCD de 5 Pulgadas
La LCD de 5 pulgadas integrada en el reTerminal está conectada a la interfaz DSI de 30 pines en la placa portadora interior. Esta LCD soporta multi-táctil de 5 puntos y para habilitar esta característica, la LCD está conectada a otra interfaz TP en la placa portadora.
Esquemáticos

Consejo: Haz clic aquí para una imagen de mayor resolución
Panel Táctil para LCD
Uso
El panel táctil para la LCD está conectado a través de un conector FPC de 6 pines. Puedes probarlo usando la herramienta evtest
- Paso 1. Escribe lo siguiente para instalar evtest, que es una herramienta de monitoreo y consulta de eventos de dispositivos de entrada
sudo apt install evtest
- Paso 2. Abrir la herramienta evtest
evtest

- Paso 3. Escribe 1 y verás la siguiente salida

- Paso 4. Toca aleatoriamente en la pantalla LCD del reTerminal y verás la siguiente salida

Uso en imagen Buildroot
- No necesitas instalar la herramienta evtest porque ya está instalada
- Antes de ejecutar evtest necesitas cambiar a root escribiendo su -
- Sigue los otros pasos como se mencionó anteriormente
Uso en imagen Yocto
- No necesitas instalar la herramienta evtest porque ya está instalada
- Sigue los otros pasos como se mencionó anteriormente
Conectar otros dispositivos al conector FPC vía I2C
El panel táctil está conectado al reTerminal vía protocolo de comunicación I2C. Así que puedes conectar fácilmente otros dispositivos I2C a esta interfaz FPC de 6 pines si lo prefieres. El diagrama de conexión es el siguiente

Después de eso sigue los pasos del tema anterior sobre cómo usar I2C
4 Botones Programables por el Usuario
Hay 4 botones programables por el usuario en la parte frontal del reTerminal. ¡Estos botones pueden ser controlados fácilmente usando software y pueden ser asignados para encender/apagar diferentes funciones según tus aplicaciones!
Esquemáticos

Consejo: Haz clic aquí para una imagen de mayor resolución
Uso

- Paso 1. Abre la herramienta evtest
evtest

- Paso 2. Escribe 0 y verás la siguiente salida

- Paso 3. Presiona los botones de izquierda a derecha y verás lo siguiente

Nota: Los botones están configurados como a s d f de izquierda a derecha por defecto
- Paso 4. Si quieres configurar los botones, escribe lo siguiente
sudo nano /boot/config.txt
- Paso 5. Modifica el archivo añadiendo lo siguiente al final
dtoverlay=reTerminal,key0=0x100,key1=0x101,key2=0x102,key3=0x103,tp_rotate=1
Nota: Aquí los números hexadecimales 100,101,102 y 103 se asignan a key0, key1, key2. key3 respectivamente
Uso en imagen Buildroot
- No necesitas instalar la herramienta evtest porque ya está instalada
- Antes de ejecutar evtest necesitas cambiar a root escribiendo su -
- Sigue los otros pasos como se mencionó anteriormente
Uso en imagen Yocto
- No necesitas instalar la herramienta evtest porque ya está instalada
- Sigue los otros pasos como se mencionó anteriormente
3 LEDs Programables por el Usuario
Hay 2 LEDs programables por el usuario en la parte frontal del reTerminal. Estos LEDs pueden encenderse/apagarse usando software y pueden ser útiles en escenarios donde quieras usarlos como LEDs de estado para monitorear diferentes características de hardware. El LED USR puede iluminarse en Verde, mientras que el LED STA puede iluminarse en Rojo o Verde
Esquemáticos

Consejo: Haz clic aquí para una imagen de mayor resolución
Uso

- Paso 1. Habilitar privilegios de cuenta root
sudo -i
- Paso 2. Ingresa al siguiente directorio
cd /sys/class/leds
- Paso 3. Ingresa al siguiente directorio para controlar el LED USR de Color Verde
cd usr_led0
- Paso 4. Enciende el LED con el brillo máximo
echo 255 > brightness
Nota: Puedes introducir valores del 1 al 255 para ajustar los niveles de brillo
- Paso 5. Apagar el LED
echo 0 > brightness
- Paso 6. Ingresa al siguiente directorio para controlar el LED STA de Color Rojo
cd ..
cd usr_led1
-
Paso 7. Repite los pasos 4 - 5 para controlar el LED
-
Paso 8. Ingresa al siguiente directorio para controlar el LED STA de Color Verde
cd ..
cd usr_led2
- Paso 9. Repite los pasos 4 - 5 para controlar el LED
Uso en imagen Buildroot
- Reemplaza sudo -i con su - para habilitar los privilegios de cuenta root
- Sigue los otros pasos como se mencionó anteriormente
Uso en imagen Yocto
- sudo -i no es necesario porque ya iniciamos sesión como root
- Sigue los otros pasos como se mencionó anteriormente
Puerto Ethernet Gigabit
reTerminal tiene un Conector Ethernet Gigabit (RJ45) integrado. Este puerto está conectado al PHY Ethernet Gigabit del módulo CM4 que está basado en Broadcom BCM54210PE. También es compatible con IEEE 1588-2008.
Esquemáticos

Consejo: Haz clic aquí para una imagen de mayor resolución
Co-Procesador de Cifrado
reTerminal tiene características de seguridad como un co-procesador criptográfico Microchip ATECC608A con almacenamiento de claves seguro basado en hardware. También tiene almacenamiento protegido para hasta 16 claves, certificados o datos. Proporciona soporte de hardware para firma simétrica, verificación, acuerdo de claves – ECDSA. Tiene soporte de hardware para algoritmos simétricos, gestión de claves de red y arranque seguro.
Esquemáticos
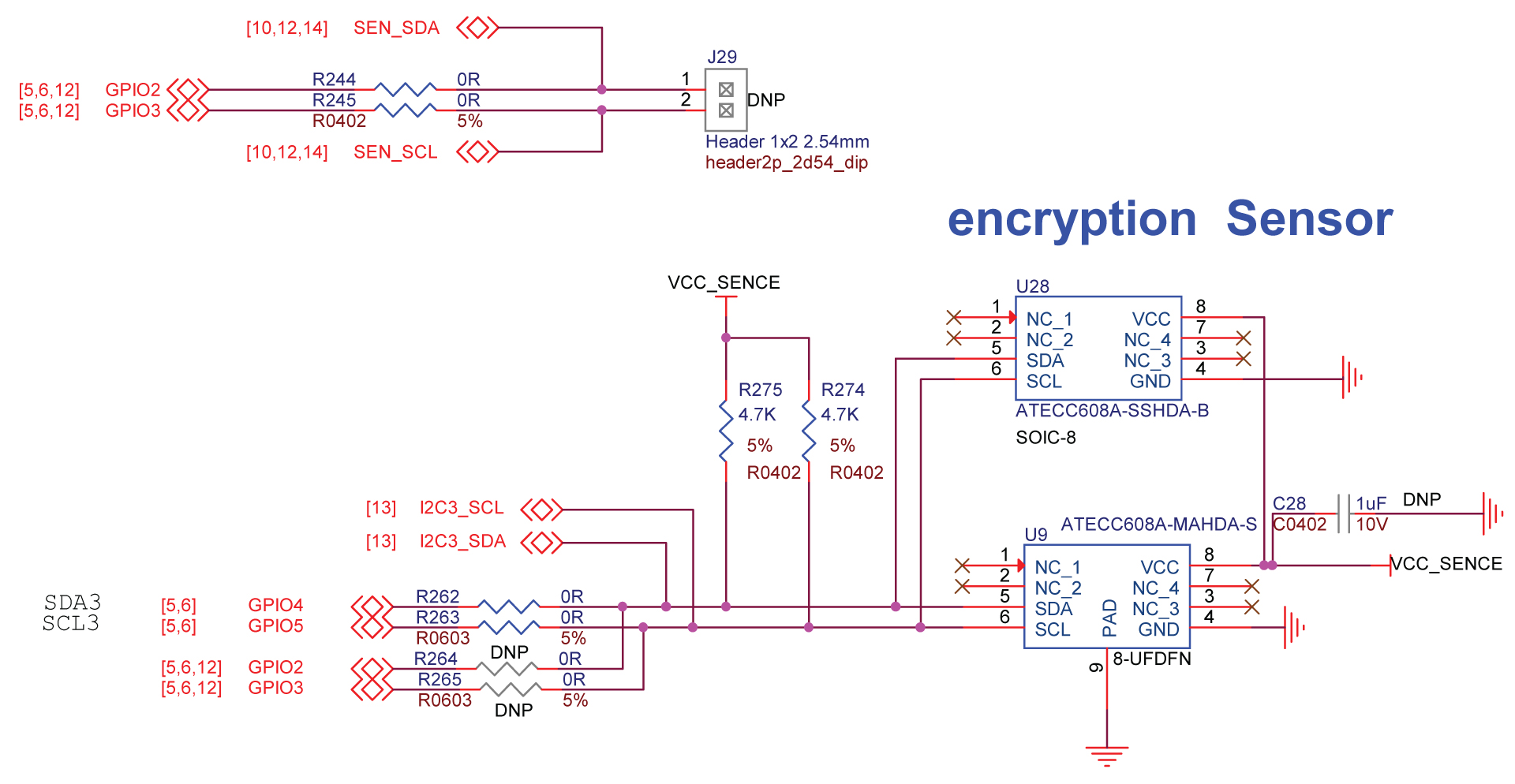
Consejo: Haz clic aquí para una imagen de mayor resolución
Uso
- Paso 1. Lista todos los buses I2C disponibles
i2cdetect -l
- Paso 2. Escanea las direcciones estándar en el bus I2C 3 (i2c-3)
i2cdetect -y 3

Nota: 3 representa el número de bus I2C
El dispositivo con dirección I2C 0x60 es el coprocesador de cifrado
Uso en imagen Buildroot
- Funciona como se indica arriba
Uso en imagen Yocto
- I2C no está habilitado al encender. Solo funciona con modprobe i2c-dev después de cada arranque. Esto se actualizará una vez que se solucione.
RTC
El RTC integrado en el reTerminal está basado en NXP Semiconductors PCF8563T y utiliza una batería CR1220 para alimentarlo. Tiene una corriente de respaldo baja; típicamente 0.25μA a VDD = 3.0 V y una temperatura = 25°C. Puede utilizarse para proyectos donde necesites implementar funciones de mantenimiento de tiempo.
Nota: Una batería CR1220 ya está instalada de fábrica.
Esquemáticos

Consejo: Haz clic aquí para una imagen de mayor resolución
Uso
Escribe el siguiente comando para obtener la información de fecha y hora del RTC
sudo hwclock

Uso en imagen Buildroot
- Primero escribe su - para habilitar la cuenta root
- Luego escribe hwclock
Uso en imagen Yocto
- sudo no es necesario porque ya iniciamos sesión como root
- Solo escribe hwclock
Sensor de Luz
reTerminal está equipado con un sensor de luz digital Levelek LTR-303ALS-01 y está conectado a la interfaz FPC de 6 pines. Se puede usar para detectar los niveles de luz en el entorno y también se puede usar para ajuste automático del brillo de la retroiluminación LCD según los niveles de luz circundantes.
Esquemáticos

Consejo: Haz clic aquí para una imagen de mayor resolución
Uso
- Paso 1. Habilitar privilegios de cuenta root
sudo -i
- Paso 2. Ingresa al siguiente directorio
cd /sys/bus/iio/devices/iio:device0
- Paso 3. Escribe lo siguiente para obtener el valor de intensidad de luz en Lux
cat in_illuminance_input

El sensor de luz está conectado al reTerminal a través del protocolo de comunicación I2C. Por lo tanto, puedes conectar fácilmente otros dispositivos I2C a esta interfaz FPC de 6 pines si lo prefieres. El diagrama de conexión es el siguiente

Después de eso, sigue los pasos del tema anterior sobre cómo usar I2C
Uso en imagen Buildroot
- Reemplaza sudo -i con su - para habilitar los privilegios de cuenta root
- Sigue los otros pasos como se mencionó anteriormente
Uso en imagen Yocto
- sudo -i no es necesario porque ya iniciamos sesión como root
- Sigue los otros pasos como se mencionó anteriormente
Acelerómetro
El acelerómetro de 3 ejes STMicroelectronics LIS3DHTR integrado se puede usar para realizar muchas aplicaciones diferentes con el reTerminal. Puedes usarlo para cambiar automáticamente la orientación de la pantalla mientras rotas el reTerminal y mucho más.
Esquemáticos

Consejo: Haz clic aquí para una imagen de mayor resolución
Uso
- Paso 1. Abre la herramienta evtest
evtest
- Paso 2. Escribe 1 y verás los valores de aceleración X,Y,Z

Uso en imagen Buildroot
- No necesitas instalar la herramienta evtest porque ya está instalada
- Antes de ejecutar evtest necesitas cambiar a root escribiendo su -
- Sigue los otros pasos como se mencionó anteriormente
Uso en imagen Yocto
- No necesitas instalar la herramienta evtest porque ya está instalada
- Sigue los otros pasos como se mencionó anteriormente
Zumbador
Hay un zumbador integrado en el reTerminal. Este puede ser controlado usando software. Este zumbador puede ser usado como un indicador en diferentes aplicaciones.
Esquemáticos

Consejo: Haz clic aquí para una imagen de mayor resolución
Uso
- Paso 1. Habilita los privilegios de cuenta root
sudo -i
- Paso 2. Ingresa al siguiente directorio
cd /sys/class/leds/usr_buzzer
- Paso 3. Enciende el zumbador
echo 1 > brightness
- Paso 4. Apagar el zumbador
echo 0 > brightness
Uso en imagen Buildroot
- Reemplaza sudo -i con su - para habilitar los privilegios de cuenta root
- Sigue los otros pasos como se mencionó anteriormente
Uso en imagen Yocto
- sudo -i no es necesario porque ya iniciamos sesión como root
- Sigue los otros pasos como se mencionó
Puertos USB 2.0
Raspberry Pi CM4 ya tiene un Hub USB 2.0 integrado. Este Hub se extiende a 2 Puertos USB 2.0 en el reTerminal como USB HOST
Esquemáticos

Consejo: Haz clic aquí para una imagen de mayor resolución
Uso
- Paso 1. Conecta un dispositivo USB a uno de los puertos USB 2.0 en el reTerminal

- Paso 2. Lista el dispositivo USB conectado escribiendo lo siguiente en una ventana de terminal
lsusb

- Paso 3. Escribe lo siguiente para obtener más información sobre el dispositivo USB conectado, como el tamaño de la unidad, particiones, punto de montaje, etc
lsblk

- Paso 4. Accede al dispositivo USB conectado y lista todos los archivos en su interior
cd /media/pi/NEW VOLUME
ls -l

Nota: El punto de montaje cambiará de un dispositivo USB a otro
Ranura para Tarjeta Micro-SD
reTerminal está equipado con una ranura para tarjeta micro-sd. Esto es útil cuando quieres instalar el sistema operativo en una tarjeta micro-SD, mientras se usa el módulo CM4 sin eMMC. Se recomienda usar una tarjeta con un mínimo de al menos 8GB. ¡Sigue este enlace para aprender más!
Esquemas
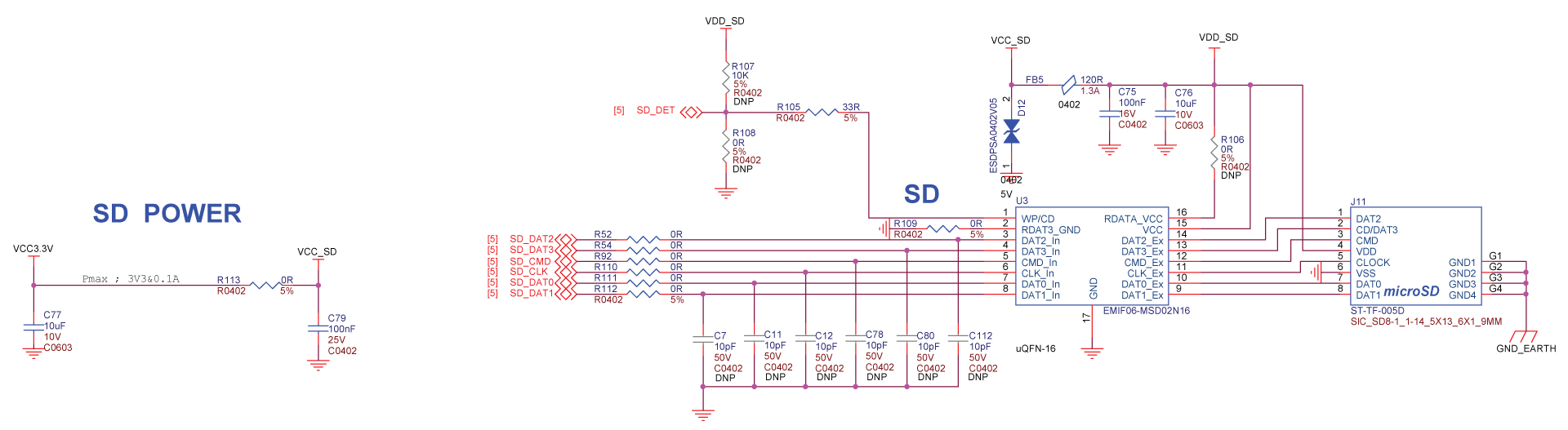
Consejo: Haz clic aquí para una imagen de mayor resolución
Puerto Micro HDMI
Hay un puerto micro HDMI en el reTerminal y puedes usarlo para conectar a pantallas HDMI mediante un cable micro HDMI a HDMI estándar. Soporta hasta resolución 4K a 60fps.
Esquemas

Consejo: Haz clic aquí para una imagen de mayor resolución
Uso
- Paso 1. Conecta una pantalla HDMI al puerto micro-HDMI del reTerminal usando un cable micro-HDMI a HDMI estándar

- Paso 2. Enciende el reTerminal y verás la salida de la interfaz tanto en la pantalla LCD del reTerminal como en la pantalla HDMI conectada
Nota: Si conectas una pantalla mientras el reTerminal está encendido, necesitas escribir sudo service lightdm restart para mostrar la interfaz en la pantalla HDMI conectada.
- Paso 3. Escribe lo siguiente en una ventana de terminal para instalar la utilidad Screen Configuration
sudo apt install arandr
- Paso 4. Haz clic en el icono de Raspberry Pi en la esquina superior izquierda y navega a
Preferences > Screen Configuration

- Paso 5. Dentro de la ventana Screen Layout Editor, navega a
Configure > Screens > HDMI-1 > Resolutiony ajusta seleccionando la resolución de la pantalla HDMI conectada.

Nota: También puedes cambiar la frecuencia y la orientación de la pantalla
- Paso 6. Arrastra las dos cajas para cambiar la disposición de las pantallas.

- Paso 7. Haz clic en la marca de verificación para aplicar la configuración

Uso en imagen Buildroot/ Yocto
- La conexión en caliente no funciona por el momento. Esto se actualizará una vez que se solucione.
- Por lo tanto, necesitas primero conectar a la pantalla HDMI y luego encender el reTerminal
- Ten en cuenta que el paquete arandr no está disponible para la imagen del sistema Buildroot
Puerto USB Type-C
El Puerto USB Type-C en el reTerminal puede usarse para alimentar el reTerminal usando 5V/4A (recomendado). Sin embargo, también puede usarse para actuar como un Dispositivo USB donde puedes conectar el reTerminal a una PC HOST y el reTerminal actuará como un Dispositivo de Almacenamiento Masivo USB. Aquí, podrás acceder al eMMC integrado del reTerminal a través de una PC y flashear un sistema operativo al eMMC. ¡Haz clic aquí para aprender más!

Montura de Cámara Estándar (1/4 pulgada)
reTerminal tiene una montura de cámara estándar con un diámetro de 1/4 pulgada. Por lo tanto, puedes conectar el reTerminal a un trípode estándar.

Librería Python para reTerminal
Hemos preparado una librería Python que te permite usar el hardware integrado en el reTerminal. Actualmente el acelerómetro, LEDs de usuario, botones de usuario y zumbador pueden ser accedidos usando esta librería Python.
Instalación
Abre una ventana de terminal en el reTerminal y ejecuta lo siguiente
sudo pip3 install seeed-python-reterminal
Nota: El código fuente se puede encontrar aquí
Uso
- Paso 1. Crear un nuevo archivo python y abrir usando el editor de texto nano
nano test.py
-
Paso 2. Ingresa los códigos de python
-
Paso 3. Presiona CTRL + X y luego presiona Y para guardar el archivo
-
Paso 4. Finalmente ejecuta el archivo
python3 test.py
Puedes seguir los pasos anteriores para probar las siguientes funciones de hardware. Los códigos Python incluidos bajo cada sección pueden ingresarse directamente en el archivo test.py y luego ejecutar el archivo
Prueba de LEDs de Usuario
import seeed_python_reterminal.core as rt
import time
print("STA ON, USR OFF")
rt.sta_led = True
rt.usr_led = False
time.sleep(1)
print("STA OFF, USR ON")
rt.sta_led = False
rt.usr_led = True
time.sleep(1)
print("STA RED, USR OFF")
rt.sta_led_green = False
rt.sta_led_red = True
rt.usr_led = False
time.sleep(1)
print("STA OFF, USR OFF")
rt.sta_led = False
rt.usr_led = False
Prueba del Zumbador
import seeed_python_reterminal.core as rt
import time
print("BUZZER ON")
rt.buzzer = True
time.sleep(1)
print("BUZZER OFF")
rt.buzzer = False
Prueba de Botones de Usuario
import seeed_python_reterminal.core as rt
import seeed_python_reterminal.button as rt_btn
device = rt.get_button_device()
while True:
for event in device.read_loop():
buttonEvent = rt_btn.ButtonEvent(event)
if buttonEvent.name != None:
print(f"name={str(buttonEvent.name)} value={buttonEvent.value}")
Prueba del Acelerómetro
import seeed_python_reterminal.core as rt
import seeed_python_reterminal.acceleration as rt_accel
device = rt.get_acceleration_device()
while True:
for event in device.read_loop():
accelEvent = rt_accel.AccelerationEvent(event)
if accelEvent.name != None:
print(f"name={str(accelEvent.name)} value={accelEvent.value}")
Prueba del Acelerómetro y Botones
import asyncio
import seeed_python_reterminal.core as rt
import seeed_python_reterminal.acceleration as rt_accel
import seeed_python_reterminal.button as rt_btn
async def accel_coroutine(device):
async for event in device.async_read_loop():
accelEvent = rt_accel.AccelerationEvent(event)
if accelEvent.name != None:
print(f"accel name={str(accelEvent.name)} value={accelEvent.value}")
async def btn_coroutine(device):
async for event in device.async_read_loop():
buttonEvent = rt_btn.ButtonEvent(event)
if buttonEvent.name != None:
print(f"name={str(buttonEvent.name)} value={buttonEvent.value}")
accel_device = rt.get_acceleration_device()
btn_device = rt.get_button_device()
asyncio.ensure_future(accel_coroutine(accel_device))
asyncio.ensure_future(btn_coroutine(btn_device))
loop = asyncio.get_event_loop()
loop.run_forever()
Uso en imagen Buildroot
- Esta biblioteca se añadirá más tarde a la imagen Buildroot
- Primero escriba su - para habilitar la cuenta root
- Luego escriba pip3 install seeed-python-reterminal
- use vi como editor de texto al crear los archivos Python
- La demostración de Accel + botón tiene un problema. Esto se actualizará una vez que se solucione
Uso en imagen Yocto
- Aunque Python está instalado, pip no está instalado. Más tarde empaquetaremos esta biblioteca dentro de esta imagen del sistema
Soporte Técnico y Discusión del Producto
¡Gracias por elegir nuestros productos! Estamos aquí para brindarle diferentes tipos de soporte para asegurar que su experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para satisfacer diferentes preferencias y necesidades.