Primeros pasos con reTerminal E10-1
Materiales necesarios
| reTerminal | reTerminal E10-1 |
|---|---|
 |  |
| Obtener Uno Ahora | Obtener Uno Ahora |
Preparación preliminar
Conexión
Tenga en cuenta la orientación y coloque el reTerminal sobre el reTerminal E10-1, y presione para que encajen firmemente. Si el reTerminal E10-1 está encendido en este momento, reTerminal se activará e iniciará el sistema. Si desea saber más sobre reTerminal, haga clic en reTerminal.
Instalación y extracción
Durante el proceso de uso del reTerminal E10-1, puede ser necesario retirar su carcasa para añadir periféricos.
Instalación del controlador
Si desea que reTerminal utilice las funciones de reTerminal E10-1, debe instalar el controlador para reTerminal antes de comenzar. Siga los comandos en la ventana de terminal de reTerminal.
git clone https://github.com/Seeed-Studio/seeed-linux-dtoverlays.git
cd seeed-linux-dtoverlays
sudo ./scripts/reTerminal.sh
Para 32bit OS deberá añadir el siguiente paso antes de ejecutar sudo ./scripts/reTerminal.sh
echo arm_64bit=0 | sudo tee -a /boot/config.txt
Una vez finalizada la instalación, reinicie la máquina. Luego use el siguiente comando para comprobar si existe el archivo reTerminal-bridge.dtbo y asegurarse de que la instalación del controlador se haya completado.
ls /boot/overlays/reTerminal-bridge.dtbo

Instalar bibliotecas
Instale la biblioteca de python3.
sudo apt-get update
sudo apt-get install python3-pip
sudo pip3 install RPi.GPIO
sudo apt-get install python3-serial
Instale la biblioteca de git.
sudo apt install -y git
Alimentación
Hay tres métodos para suministrar energía como se muestra a continuación:
- Conector DC
- PoE
- UPS - batería 18650
La batería para este dispositivo es una batería recargable de ion-litio NCR18650B. Tenga en cuenta que no hay batería en el paquete, aunque la batería está disponible en tiendas de conveniencia habituales y el cliente debe prepararla por su cuenta. Y lo que proponemos es Panasonic NCR18650B 3.6V 3400mAh.
Conector DC
Suministre energía al reTerminal, a la placa de expansión y a la batería con DC 12V @4A
PoE
La entrada de alimentación PoE es RJ45 y admite una potencia máxima de entrada de 25W.
UPS - batería 18650
Portabaterías para 2 baterías con pin de fijación.
Ventilador
Materiales necesarios
- reTerminal x1
- reTerminal E10-1 x1
- Ventilador (incluido) x1
Para mantener el reTerminal y el reTerminal E10-1 a un nivel de temperatura normal bajo carga pesada, hay un ventilador de 3 pines dentro del reTerminal E10-1.

Este ejemplo presenta cómo controlar el ventilador en el reTerminal E10-1.
Paso 1. Podemos controlar directamente el interruptor del ventilador con el siguiente comando.
#Toggle fan on
raspi-gpio set 23 op pn dh
#Toggle fan off
raspi-gpio set 23 op pn dl
Paso 2. También podemos habilitar y deshabilitar el ventilador detectando la temperatura de la CPU. Siga los pasos a continuación para descargar y ejecutar el programa.
git clone https://github.com/limengdu/Seeed_reTerminal_Bridge_Fan_control.git
cd Seeed_reTerminal_Bridge_Fan_control/
sudo python3 fan.py
Aquí está el código fan.py como referencia.
import sys
import time
try:
import RPi.GPIO as GPIO
except RuntimeError:
print("Error importting Rpi.GPIO")
MAX_TEMP = 40.0
MIN_TEMP = 20.0
def cpu_temp():
f = open("/sys/class/thermal/thermal_zone0/temp",'r')
return float(f.read())/1000
def main():
channel = 23
GPIO.setmode(GPIO.BCM)
# init 23 off
GPIO.setup(channel,GPIO.OUT,initial=GPIO.LOW)
is_close = True
while 1:
temp = cpu_temp()
if is_close:
if temp > MAX_TEMP:
GPIO.output(channel,GPIO.HIGH)
is_close = False
else:
if temp < MIN_TEMP:
GPIO.output(channel,GPIO.LOW)
is_close = True
time.sleep(2.0)
GPIO.setwarnings(False)
if __name__ == '__main__':
main()
Después de que el código se ejecute correctamente, cuando se detecte que la temperatura de la CPU es superior a 40°C, el ventilador se encenderá. Cuando la temperatura sea inferior a 20°C, el ventilador se apagará.
Comunicación CAN
Una Controller Area Network (CAN) es un estándar de bus de vehículos robusto diseñado para permitir que microcontroladores y dispositivos se comuniquen entre sí en sus aplicaciones sin un ordenador host.
Materiales necesarios
- reTerminal x2
- reTerminal E10-1 x2
- cable macho a macho x2
Este ejemplo presenta cómo usar el CAN en el reTerminal E10-1.
Paso 1. Use cables macho a macho para conectar los dos reTerminal E10-1 a través de la interfaz CAN.
H -> H L -> L GND -> GND
Paso 2. Instale CAN-utils por separado en los dos reTerminal.
sudo apt install can-utils
CAN-utils es una colección de herramientas de depuración extremadamente útiles que utilizan la interfaz CAN. Incluye aplicaciones como:
- candump – Vuelca paquetes CAN – muestra, filtra y registra en disco.
- canplayer – Reproduce archivos de registro CAN.
- cansend – Envía una sola trama.
- cangen – Genera tráfico aleatorio.
- canbusload – muestra la utilización actual del bus CAN.
El código fuente de CAN-utils se puede obtener desde el repositorio de GitHub.
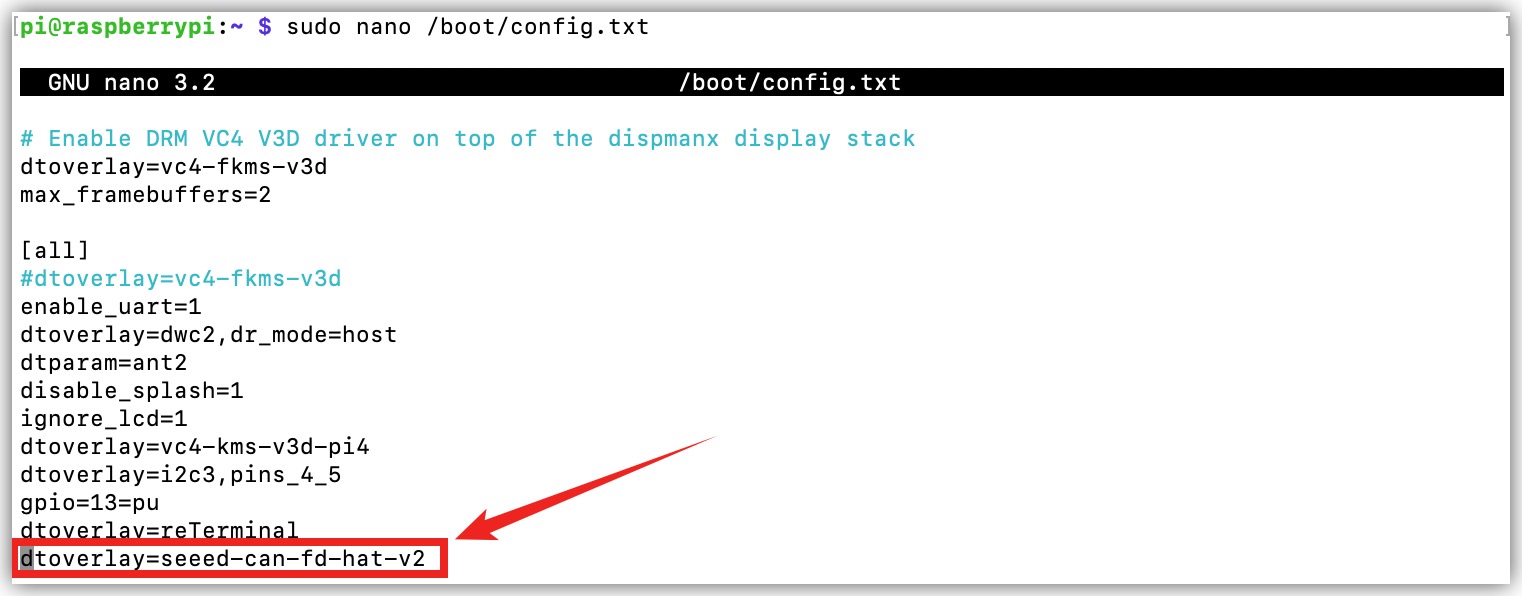
Paso 3. Añada información de configuración para los dos reTerminal. Abra el archivo /boot/config.txt con un editor y guárdelo después de añadir dtoverlay=seeed-can-fd-hat-v2 al final, luego reinicie reTerminal.
Sin una EEPROM de ID en el “hat” que especifique el hardware, el kernel de Linux no detectará automáticamente el controlador CAN en la interfaz SPI. Para cargar el controlador apropiado, debe especificar la configuración del device tree overlay en el arranque.
sudo nano /boot/config.txt
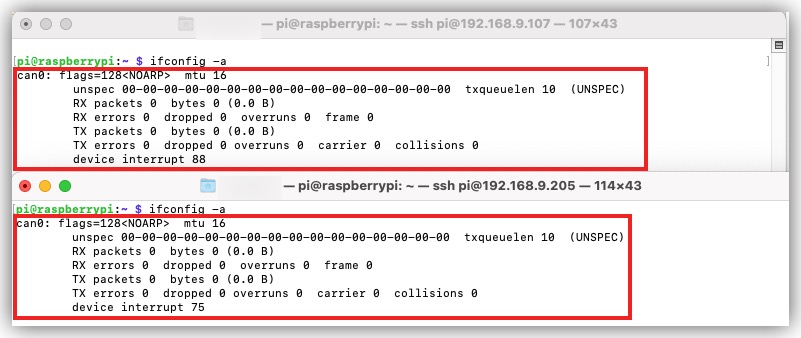
Paso 4. La interfaz CAN se comporta igual que una interfaz de red. Debería poder obtener varias estadísticas usando ifconfig -a (configuración de interfaz).
Use el comando cangen can0 -v para enviar datos aleatorios y comprobar si la comunicación CAN funciona bien.
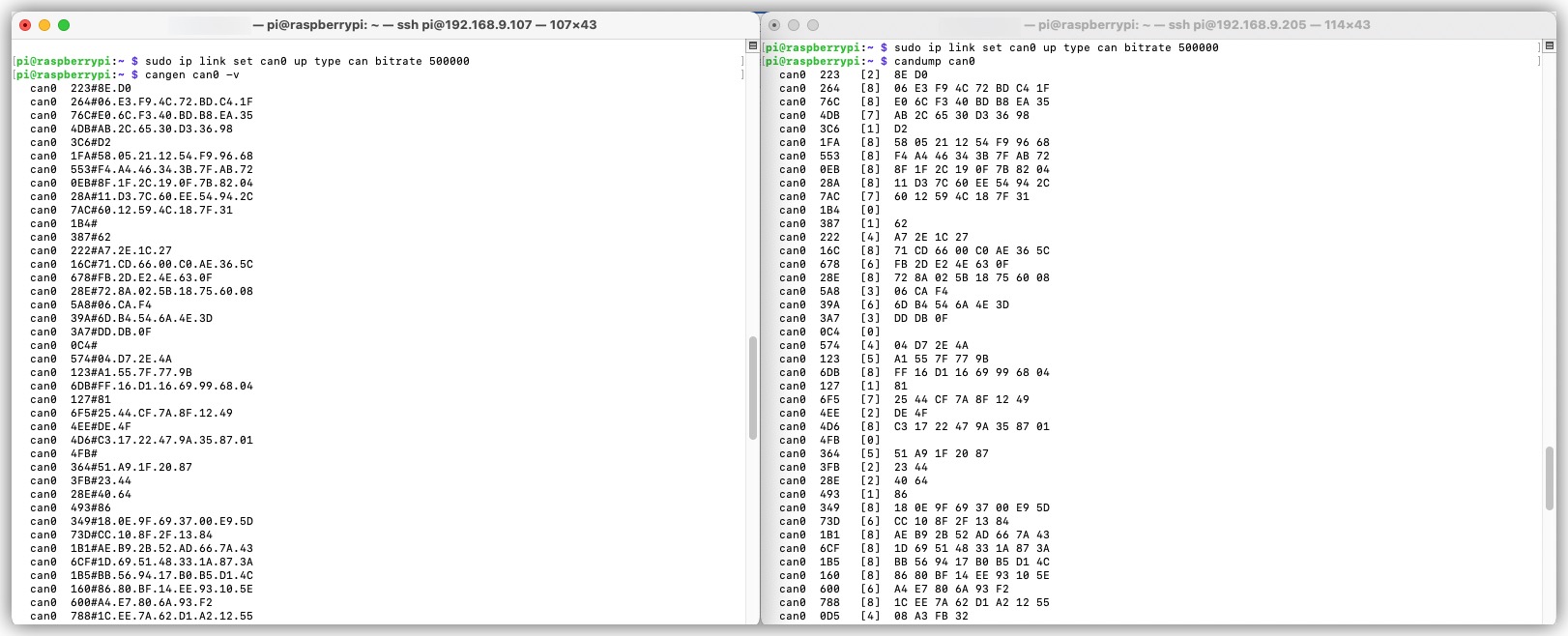
Paso 5. Puede activar manualmente la interfaz CAN usando:
sudo ip link set can0 up type can bitrate 500000
Paso 6. Descargue el code a reTerminal.
git clone https://github.com/limengdu/Seeed_reTerminal_Bridge_CAN_exmaple
Uno de los reTerminal compila y ejecuta el código que envía los datos.
cd Seeed_reTerminal_Bridge_CAN_exmaple/
gcc cantransmit.c -o cantransmit
Aquí está el código cantransmit.c como referencia.
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <net/if.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
int main(int argc, char **argv)
{
int s;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
printf("CAN Sockets Demo\r\n");
if ((s = socket(PF_CAN, SOCK_RAW, CAN_RAW)) < 0) {
perror("Socket");
return 1;
}
strcpy(ifr.ifr_name, "can0" );
ioctl(s, SIOCGIFINDEX, &ifr);
memset(&addr, 0, sizeof(addr));
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
if (bind(s, (struct sockaddr *)&addr, sizeof(addr)) < 0) {
perror("Bind");
return 1;
}
frame.can_id = 0x555;
frame.can_dlc = 5;
sprintf(frame.data, "Hello");
if (write(s, &frame, sizeof(struct can_frame)) != sizeof(struct can_frame)) {
perror("Write");
return 1;
}
if (close(s) < 0) {
perror("Close");
return 1;
}
return 0;
}
Otro reTerminal compila y ejecuta el código que recibe los datos.
gcc canreceive.c -o canreceive
Aquí está el código canreceive.c como referencia.
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <net/if.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
int main(int argc, char **argv)
{
int s, i;
int nbytes;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
printf("CAN Sockets Receive Demo\r\n");
if ((s = socket(PF_CAN, SOCK_RAW, CAN_RAW)) < 0) {
perror("Socket");
return 1;
}
strcpy(ifr.ifr_name, "can0" );
ioctl(s, SIOCGIFINDEX, &ifr);
memset(&addr, 0, sizeof(addr));
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
if (bind(s, (struct sockaddr *)&addr, sizeof(addr)) < 0) {
perror("Bind");
return 1;
}
nbytes = read(s, &frame, sizeof(struct can_frame));
if (nbytes < 0) {
perror("Read");
return 1;
}
printf("0x%03X [%d] ",frame.can_id, frame.can_dlc);
for (i = 0; i < frame.can_dlc; i++)
printf("%02X ",frame.data[i]);
printf("\r\n");
if (close(s) < 0) {
perror("Close");
return 1;
}
return 0;
}
Puedes ver que los dos reTerminals envían y reciben datos correctamente a través de la interfaz CAN.
Además de la lectura, es posible que quieras filtrar las tramas CAN que no sean relevantes. Esto ocurre a nivel de controlador y puede ser más eficiente que leer cada trama en una aplicación en modo usuario.
gcc canfilter.c -o canfilter
Aquí tienes el código canfilter.c como referencia.
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <net/if.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
int main(int argc, char **argv)
{
int s, i;
int nbytes;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
printf("CAN Sockets Receive Filter Demo\r\n");
if ((s = socket(PF_CAN, SOCK_RAW, CAN_RAW)) < 0) {
perror("Socket");
return 1;
}
strcpy(ifr.ifr_name, "can0" );
ioctl(s, SIOCGIFINDEX, &ifr);
memset(&addr, 0, sizeof(addr));
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
if (bind(s, (struct sockaddr *)&addr, sizeof(addr)) < 0) {
perror("Bind");
return 1;
}
/*
To set up a filter, initialise a single can_filter structure or array of
structures and populate the can_id and can_mask. The call setsockopt():
*/
struct can_filter rfilter[1];
rfilter[0].can_id = 0x550;
rfilter[0].can_mask = 0xFF0;
//rfilter[1].can_id = 0x200;
//rfilter[1].can_mask = 0x700;
setsockopt(s, SOL_CAN_RAW, CAN_RAW_FILTER, &rfilter, sizeof(rfilter));
nbytes = read(s, &frame, sizeof(struct can_frame));
if (nbytes < 0) {
perror("Read");
return 1;
}
printf("0x%03X [%d] ",frame.can_id, frame.can_dlc);
for (i = 0; i < frame.can_dlc; i++)
printf("%02X ",frame.data[i]);
printf("\r\n");
// And finally, if there is no further need for the socket, close it:
if (close(s) < 0) {
perror("Close");
return 1;
}
return 0;
}
La mayoría de los controladores CAN tienen filtros de aceptación y máscaras incluidos en el silicio (hardware). Desafortunadamente, la arquitectura actual realiza el filtrado en el kernel y no es tan óptima, pero sigue siendo mejor que pasar todas las tramas a la aplicación en modo usuario.
Comunicación RS485
RS485, también conocido como TIA-485(-A) o EIA-485, es un estándar que define las características eléctricas de los controladores y receptores para su uso en sistemas de comunicaciones serie. La señalización eléctrica es balanceada y se admiten sistemas multipunto. Las redes de comunicaciones digitales que implementan el estándar pueden utilizarse de forma eficaz a largas distancias y en entornos con ruido eléctrico. Se pueden conectar múltiples receptores a dicha red en un bus lineal multipunto.
Materiales requeridos
Este ejemplo introduce cómo usar el RS485 en el reTerminal E10-1.
Paso 1. Dado que la función RS485 utiliza ttyS0, es necesario cerrar la función de interacción del sistema ttyS0 antes de comenzar.
sudo raspi-config
Selecciona Interface Options, Serial port sucesivamente.
En la siguiente pantalla se te preguntará si quieres que el login shell sea accesible por serial, selecciona No.
Luego, en “Do you want to use serial port hardware”, asegúrate de que Yes esté seleccionado.
Después de que reTerminal haya realizado los cambios, verás que aparece el siguiente texto en la pantalla.
Paso 2. Usa un cable para conectar el reTerminal E10-1 al ordenador a través de la interfaz RS485.
A -> A B -> B GND -> GND
Paso 3. Usa el comando dmesg | grep tty para ver el nombre del puerto serie. Determina el nombre del puerto serie para la comunicación RS485 con el ordenador. Esto puede variar de un ordenador a otro. En general, es ttyS0.

Paso 4. Descarga el code en reTerminal.
git clone https://github.com/limengdu/Seeed_reTerminal_Bridge_RS485_exmaple
cd Seeed_reTerminal_Bridge_RS485_exmaple/
Abre el software de puerto serie en el ordenador. Ejecuta el comando sudo python3 rs485.py para obtener los siguientes efectos.
Al mismo tiempo, también puedes enviar datos de 16 bytes a reTerminal a través del asistente de puerto serie dentro de los 5 segundos posteriores a la recepción del mensaje.
Aquí tienes el código rs485.py como referencia.
import serial, time
try:
import RPi.GPIO as GPIO
except RuntimeError:
print("Error importting Rpi.GPIO")
GPIO.setmode(GPIO.BCM)
ser = serial.Serial()
ser.port = "/dev/ttyS0"
channel1 = 25
channel2 = 17
#9600,N,8,1
ser.baudrate = 9600
ser.bytesize = serial.EIGHTBITS #number of bits per bytes
ser.parity = serial.PARITY_NONE #set parity check
ser.stopbits = serial.STOPBITS_ONE #number of stop bits
ser.timeout = 0.5 #non-block read 0.5s
ser.writeTimeout = 0.5 #timeout for write 0.5s
ser.xonxoff = False #disable software flow control
ser.rtscts = False #disable hardware (RTS/CTS) flow control
ser.dsrdtr = False #disable hardware (DSR/DTR) flow control
GPIO.setup(channel1,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(channel2,GPIO.OUT,initial=GPIO.LOW)
try:
ser.open()
except Exception as ex:
print ("open serial port error " + str(ex))
exit()
if ser.isOpen():
try:
ser.flushInput() #flush input buffer
ser.flushOutput() #flush output buffer
GPIO.output(channel1,GPIO.HIGH)
GPIO.output(channel2,GPIO.HIGH)
time.sleep(0.1)
#write data
ser.write("rs485 communication is on, you can try to send data...\n".encode())
print("Sent successfully\n")
GPIO.output(channel2,GPIO.LOW)
time.sleep(5) #wait 5s
#read data
response = ser.read(16)
print("read 16 byte data:")
print(response)
ser.close()
except Exception as e1:
print ("communicating error " + str(e1))
else:
print ("open serial port error")
Comunicación RS232
RS-232 o Recommended Standard 232 es un estándar introducido originalmente en 1960 para la transmisión de datos por comunicación serie. Define formalmente las señales que conectan un DTE y un DCE. En comparación con interfaces posteriores como RS-422, RS-485 y Ethernet, RS-232 tiene menor velocidad de transmisión, menor longitud máxima de cable, mayor oscilación de voltaje, conectores estándar más grandes, sin capacidad multipunto y capacidad multidrop limitada.
Materiales requeridos
Este ejemplo introduce cómo usar el RS232 en el reTerminal E10-1.
Paso 1. Dado que la función RS485 utiliza ttyS0, es necesario cerrar la función de interacción del sistema ttyS0 antes de comenzar.
sudo raspi-config
Selecciona Interface Options, Serial port sucesivamente.
En la siguiente pantalla se te preguntará si quieres que el login shell sea accesible por serial, selecciona No.
Luego, en “Do you want to use serial port hardware”, asegúrate de que Yes esté seleccionado.
Después de que reTerminal haya realizado los cambios, verás que aparece el siguiente texto en la pantalla.
Paso 2. Usa un cable para conectar el reTerminal E10-1 al ordenador a través de la interfaz RS232.
Paso 3. Usa el comando dmesg | grep tty para ver el nombre del puerto serie. Determina el nombre del puerto serie para la comunicación RS232 con el ordenador. Esto puede variar de un ordenador a otro. En general, es ttyS0.
Paso 4. Descarga el code en reTerminal.
git clone https://github.com/limengdu/Seeed_reTerminal_Bridge_RS232_exmaple
cd Seeed_reTerminal_Bridge_RS232_exmaple/
Uno de los reTerminals compila y ejecuta el código que envía los datos.
sudo python3 rs232_send.py
Aquí tienes el código rs232_send.py como referencia.
#!/usr/bin/env python
import time
import serial
ser = serial.Serial(
port='/dev/ttyS0', # Please modify here according to the serial port name displayed by reTerminal
baudrate = 9600,
parity=serial.PARITY_NONE,
stopbits=serial.STOPBITS_ONE,
bytesize=serial.EIGHTBITS,
timeout=1
)
counter=0
try:
print("rs232 starts now!\n")
ser.write("rs232 starts now!\n".encode())
while 1:
ser.write(("Write counter:{}\n".format(counter)).encode())
time.sleep(1)
counter += 1
except KeyboardInterrupt:
exit()
Otro reTerminal compila y ejecuta el código que recibe los datos.
sudo python3 rs232_receive.py
Aquí está el código rs232_receive.py como referencia.
#!/usr/bin/env python
import time
import serial
ser = serial.Serial(
port='/dev/ttyS0',
baudrate = 9600,
parity=serial.PARITY_NONE,
stopbits=serial.STOPBITS_ONE,
bytesize=serial.EIGHTBITS,
timeout=1
)
try:
print("Start receiving data now!\n")
while 1:
x=ser.readline()
if x != b'':
print(x)
except KeyboardInterrupt:
exit()
Ethernet
Materiales requeridos
- reTerminal x1
- reTerminal E10-1 x1
Este ejemplo introduce cómo probar la conexión ethernet en reTerminal E10-1.
Paso 1. Descarga iperf3 para reTerminal y ordenador.
git clone https://github.com/esnet/iperf.git
Paso 2. Usa los siguientes códigos para instalar iperf3
cd iperf
sudo ./configure
sudo make
sudo make install
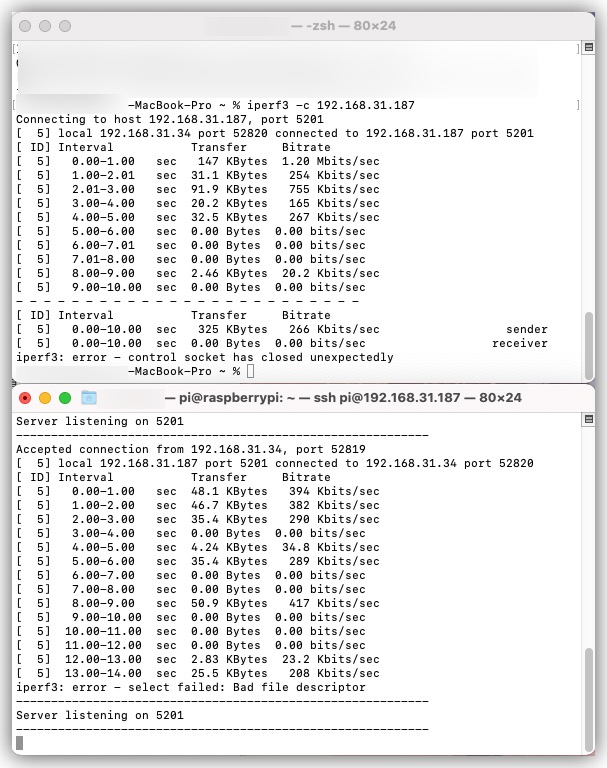
Paso 3. Usa reTerminal como servidor.
iperf3 -s
Usa un ordenador para probar la velocidad de red conectada a reTerminal. En este momento, mantén el ordenador y el reTerminal en la misma red de área local.
iperf3 -c 192.168.xxx.xxx
La dirección "192.168.xxx.xxx" anterior es la dirección del reTerminal.
Por ejemplo, en mi configuración la dirección IP de reTerminal es 192.168.31.187:
iperf3 -c 192.168.31.187
Si necesitas completar más funciones de prueba de red, puedes consultar el uso de parámetros de consulta en el sitio web del proyecto iperf.
WM1302 (USB/SPI) LoRaWAN Gateway
Materiales requeridos
La diferencia entre el módulo USB y SPI se muestra a continuación:

Este ejemplo introduce cómo usar WM1302 LoRaWAN Gateway en reTerminal E10-1.
Paso 1. Instala el módulo WM1302 en el reTerminal E10-1 y luego fíjalo con tornillos.
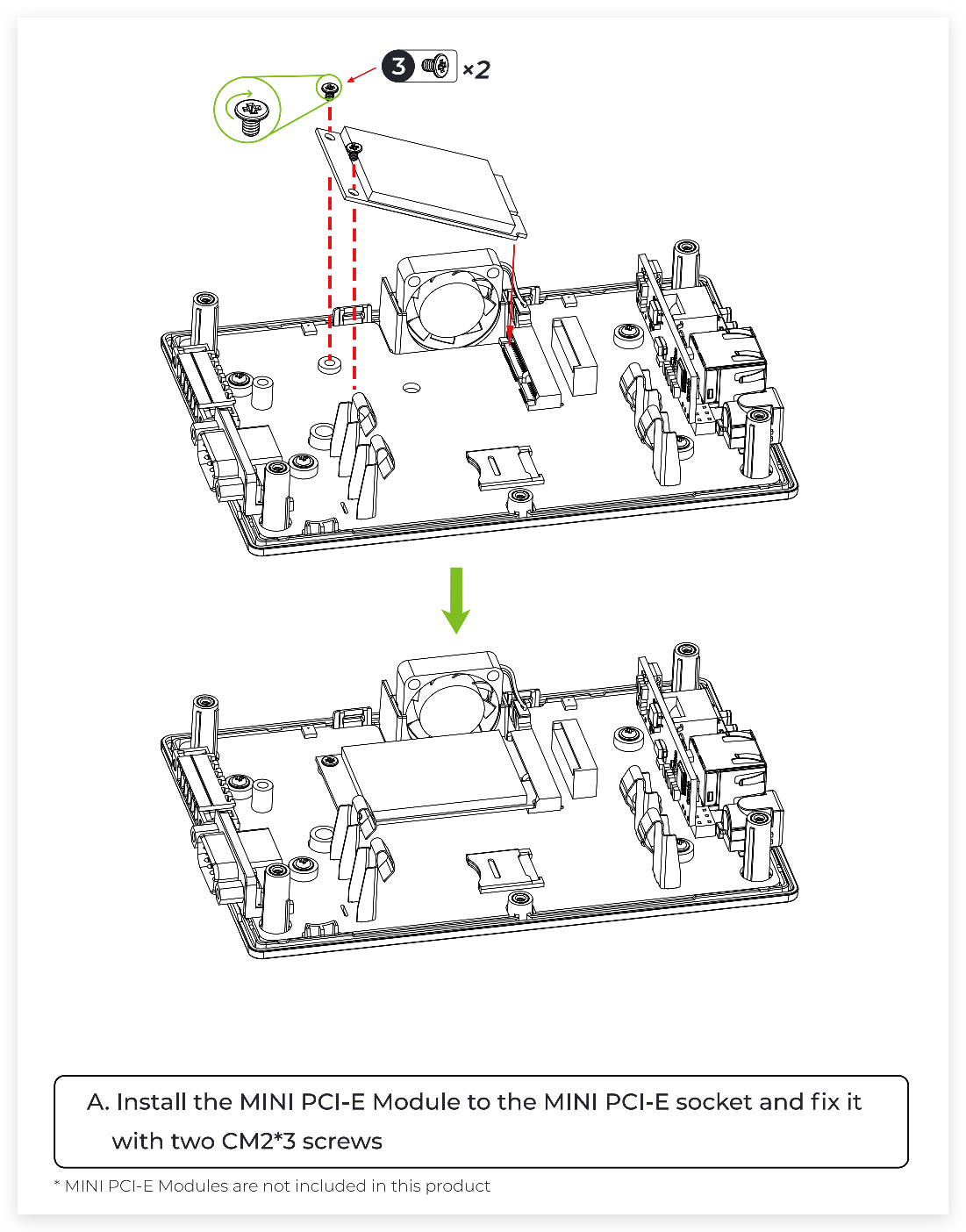

Luego gira el botón junto al ventilador a PCIE.

Paso 2. escribe sudo raspi-config en la línea de comandos para abrir la herramienta Rasberry Pi Software Configuration:
- Selecciona Interface Options
- Selecciona SPI, luego selecciona Yes para habilitarlo
- Selecciona I2C, luego selecciona Yes para habilitarlo
- Selecciona Serial Port, luego selecciona No para "Would you like a login shell..." y selecciona Yes para "Would you like the serial port hardware..."
Después de esto, reinicia Raspberry Pi para asegurarte de que estos ajustes funcionen.
Paso 3. Descarga el código WM1302 en reTerminal y compílalo.
git clone https://github.com/Lora-net/sx1302_hal
cd sx1302_hal
sudo make
Paso 4. Configura el script de reinicio. Primero descarga el archivo en sx1302_hal/packet_forwarder usando el comando
cd sx1302_hal/packet_forwarder
wget https://files.seeedstudio.com/wiki/reTerminal_Bridge/reset_lgw.sh
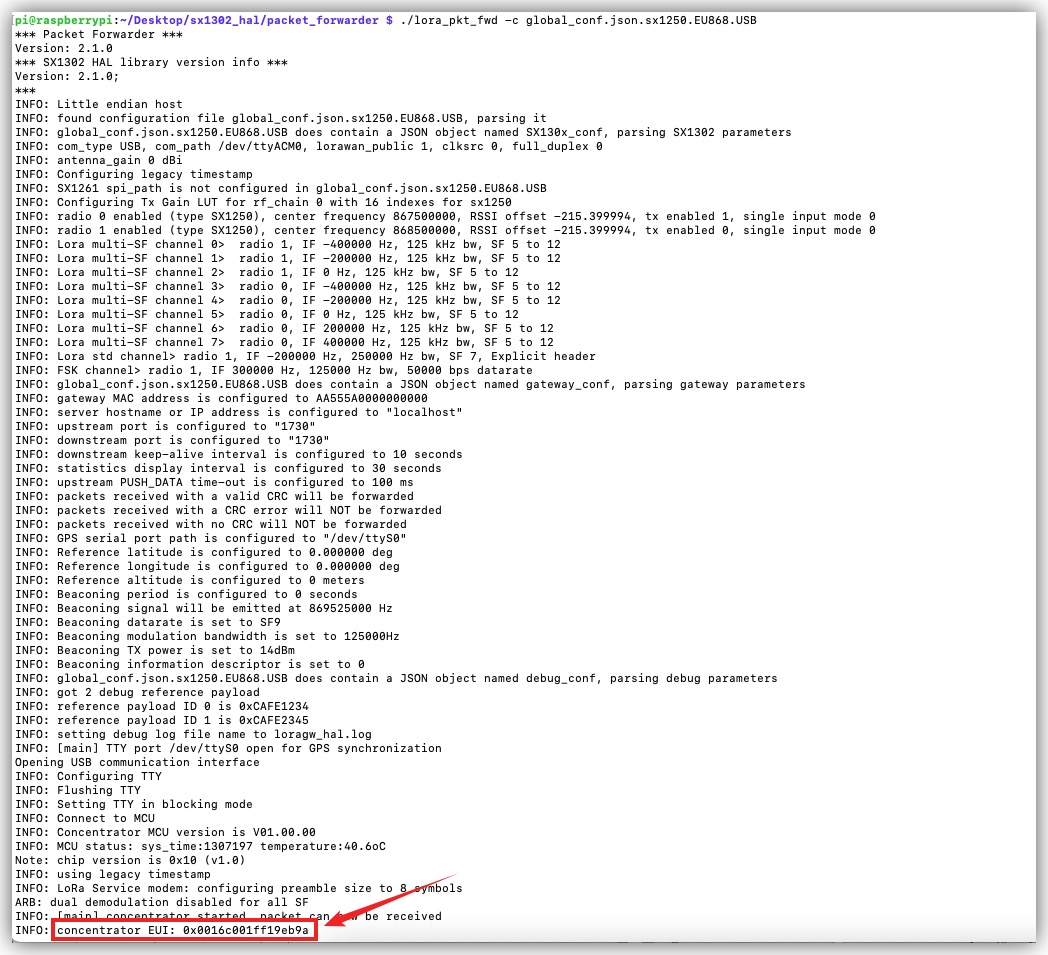
Luego ejecuta la siguiente prueba de código de acuerdo con tu versión de WM1302.
USB version
$ cd packet_forwarder
$ sudo nano reset_lgw.sh
$ ./lora_pkt_fwd -c global_conf.json.sx1250.EU868.USB
SPI version
$ cd packet_forwarder
$ sudo nano reset_lgw.sh
$ ./lora_pkt_fwd -c global_conf.json.sx1250.EU868
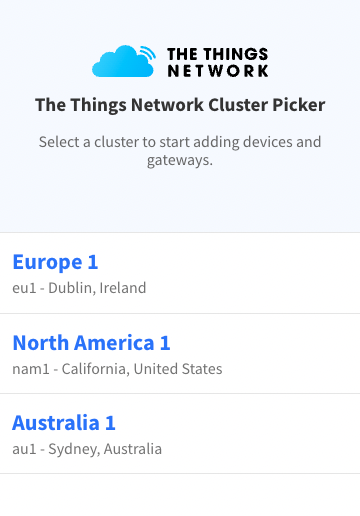
Paso 5. Regístrate en el sitio web de TTN e inicia sesión en tu cuenta. Si no tienes una, por favor regístrate. Luego entra en la interfaz Gateway y haz clic en "Get Starting"
Selecciona tu región.
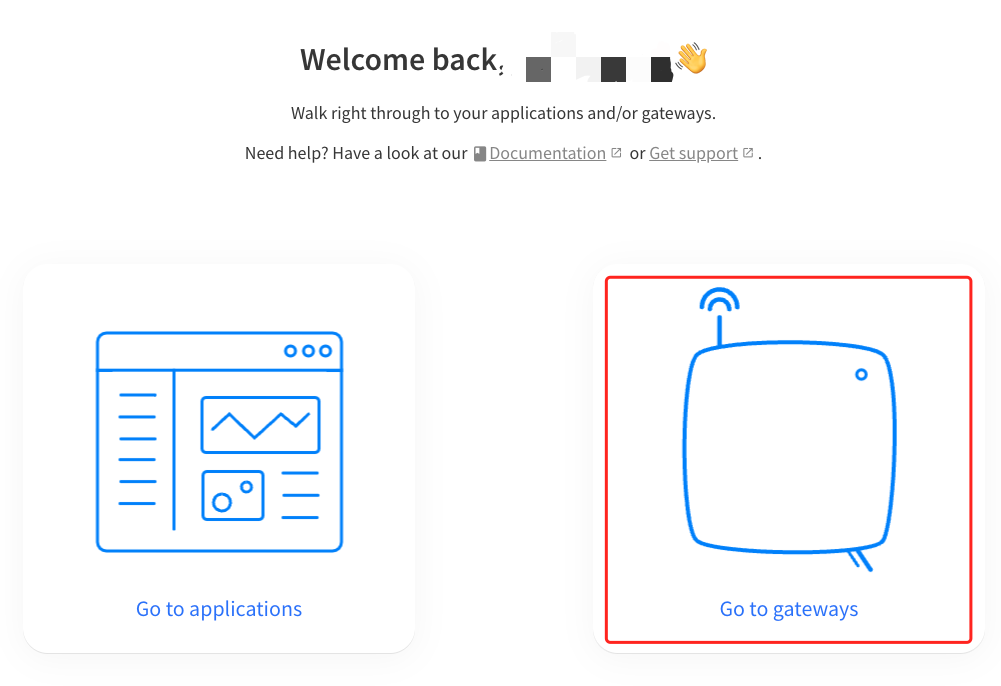
Elige "Go to gateways"
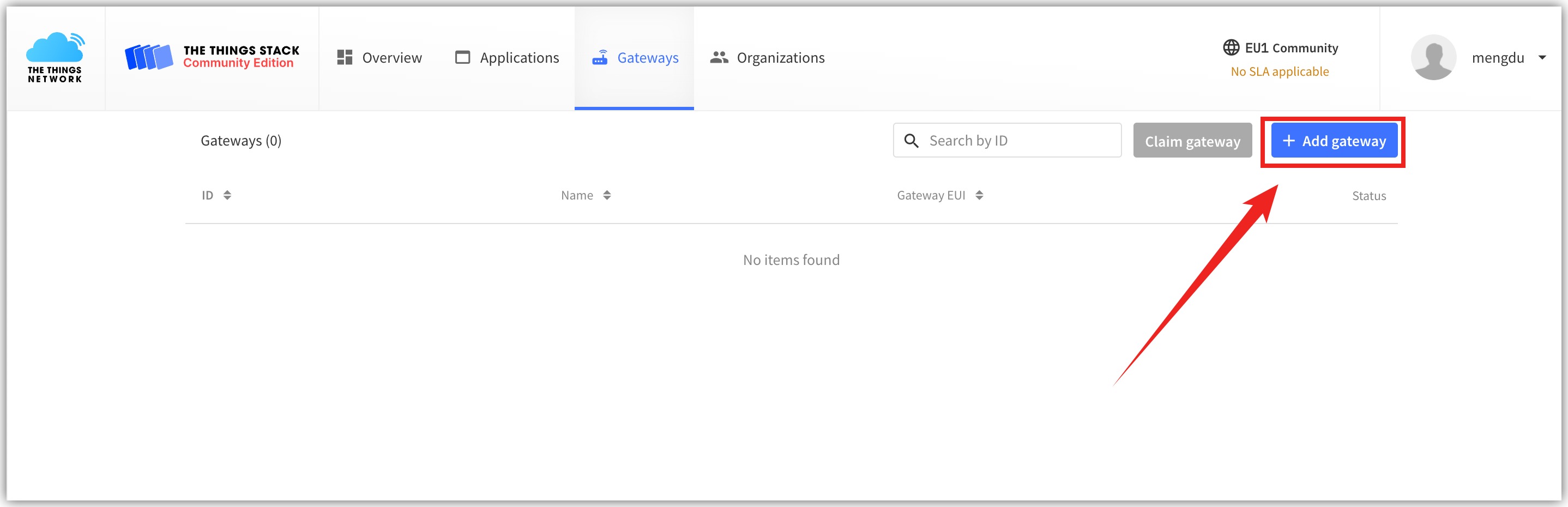
Haz clic en Add gateway para añadir el dispositivo:
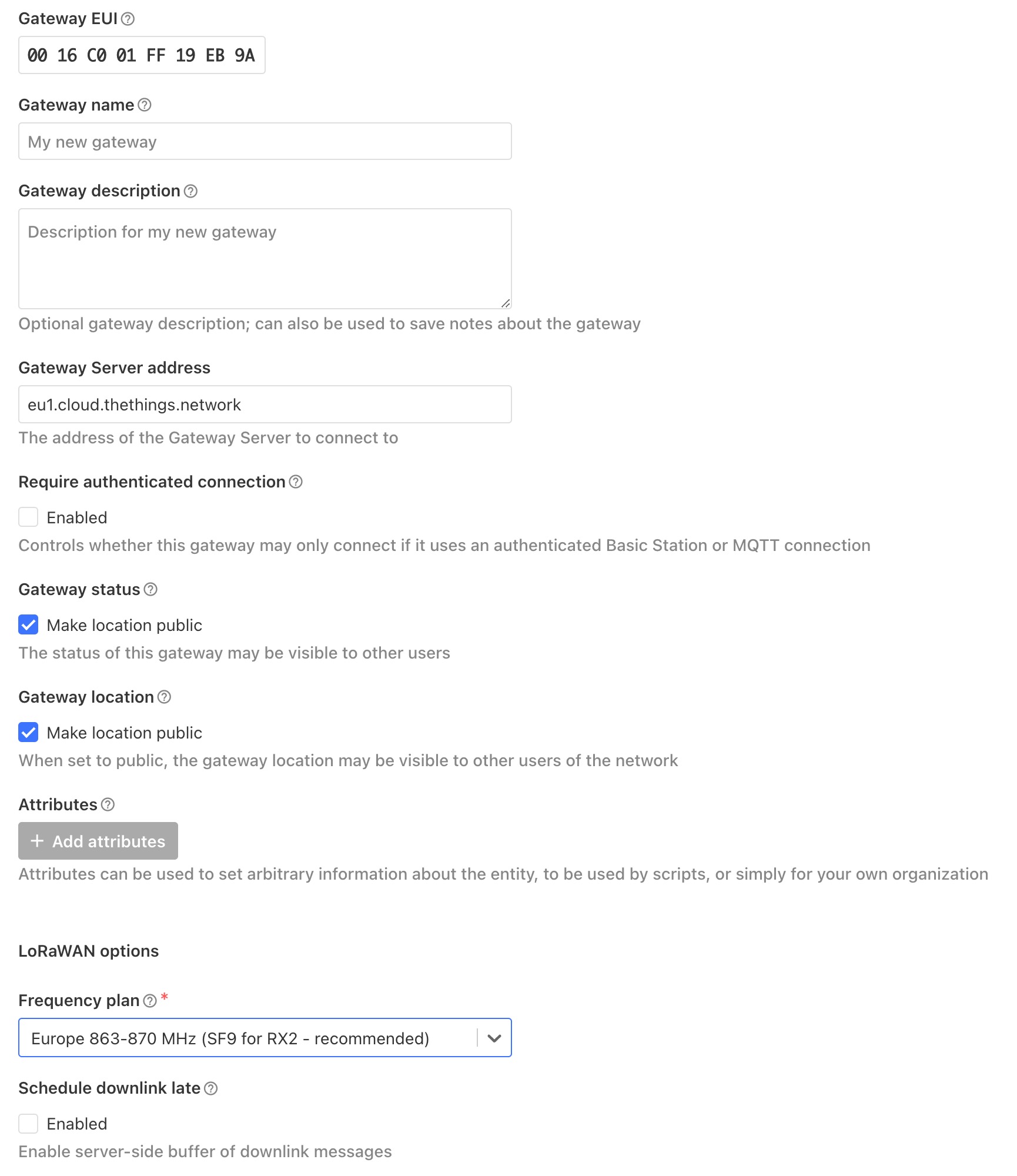
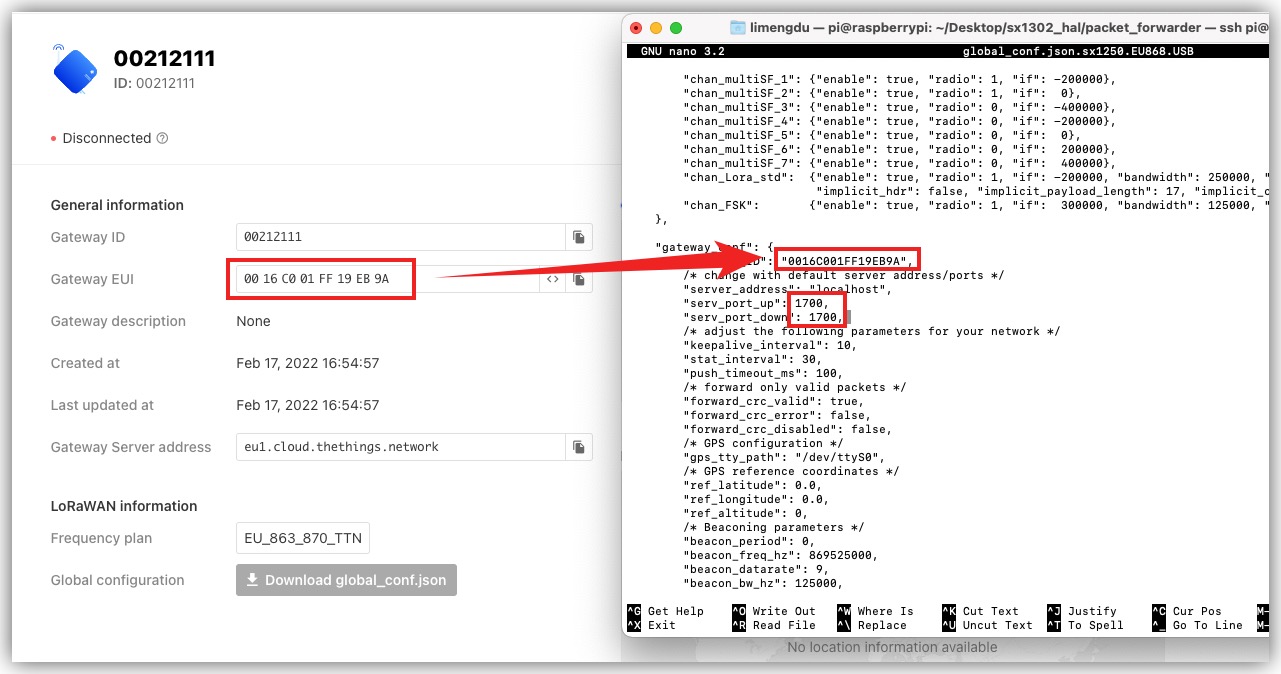
Entre ellos, el valor de Gateway EUI se mostrará en el registro cuando se ejecute la prueba en el paso 4. El Frequency plan en las opciones de Lora (tomando la versión europea como ejemplo) selecciona Europe 863-870 MHz (SF9 for RX2 - recommended). Luego haz clic en Create gateway.
Paso 6. (Tomando la versión europea como ejemplo) Si es la versión SPI, edita global_conf.json.sx1250.EU868 en sx1302_hal/packet_forwarder.
Si es la versión USB, edita global_conf.json.sx1250.EU868.USB en sx1302_hal/packet_forwarder.
Busca gateway_conf en el archivo correspondiente.
-
Luego cambia el gateway_ID posterior al Gateway EUI rellenado en la página web.
-
server_address se modifica a la Gateway Server address en la página web.
-
Tanto serv_port_up como serv_port_up se modifican a 1700.
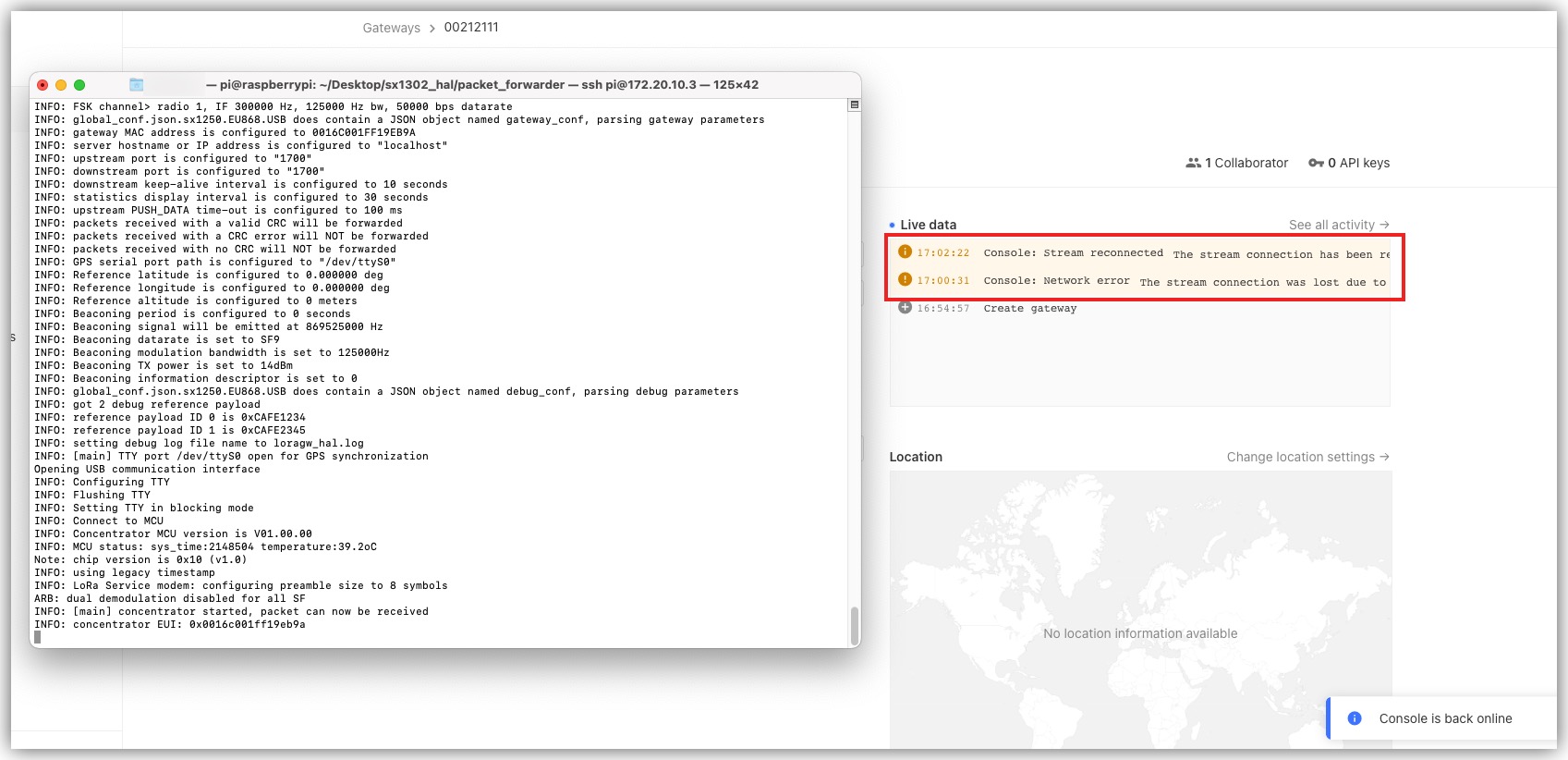
Paso 7. Ejecuta de nuevo el comando en el paso 4 y luego podrás ver la información de conexión del dispositivo en la página web.
USB version
$ ./lora_pkt_fwd -c global_conf.json.sx1250.EU868.USB
SPI version
$ ./lora_pkt_fwd -c global_conf.json.sx1250.EU868
El tutorial anterior se basa en la versión europea de WM1302. Si estás utilizando la versión estadounidense del WM1302, los pasos son en general los mismos, pero los archivos a modificar y ejecutar en el tutorial serán diferentes. El nombre del archivo se refiere a la versión que compraste y a las siguientes páginas.
Ampliación de disco duro
Materiales requeridos
- reTerminal x1
- reTerminal E10-1 x1
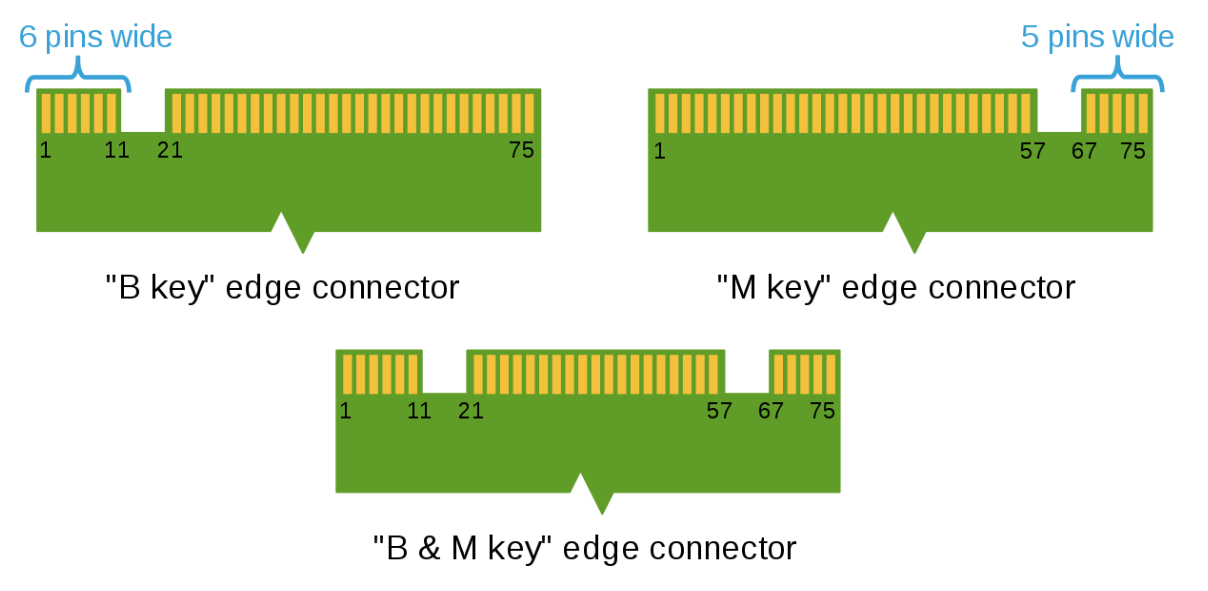
- Conector M.2 B key x1
Este ejemplo introduce cómo instalar y comprobar el funcionamiento del disco duro en reTerminal E10-1.
Paso 1. Abre la tapa trasera del reTerminal E10-1, inserta el M.2 SSD en el Mini-PCIe Connector y fíjalo con tornillos. Cierra la tapa trasera, conecta el reTerminal y enciéndelo.
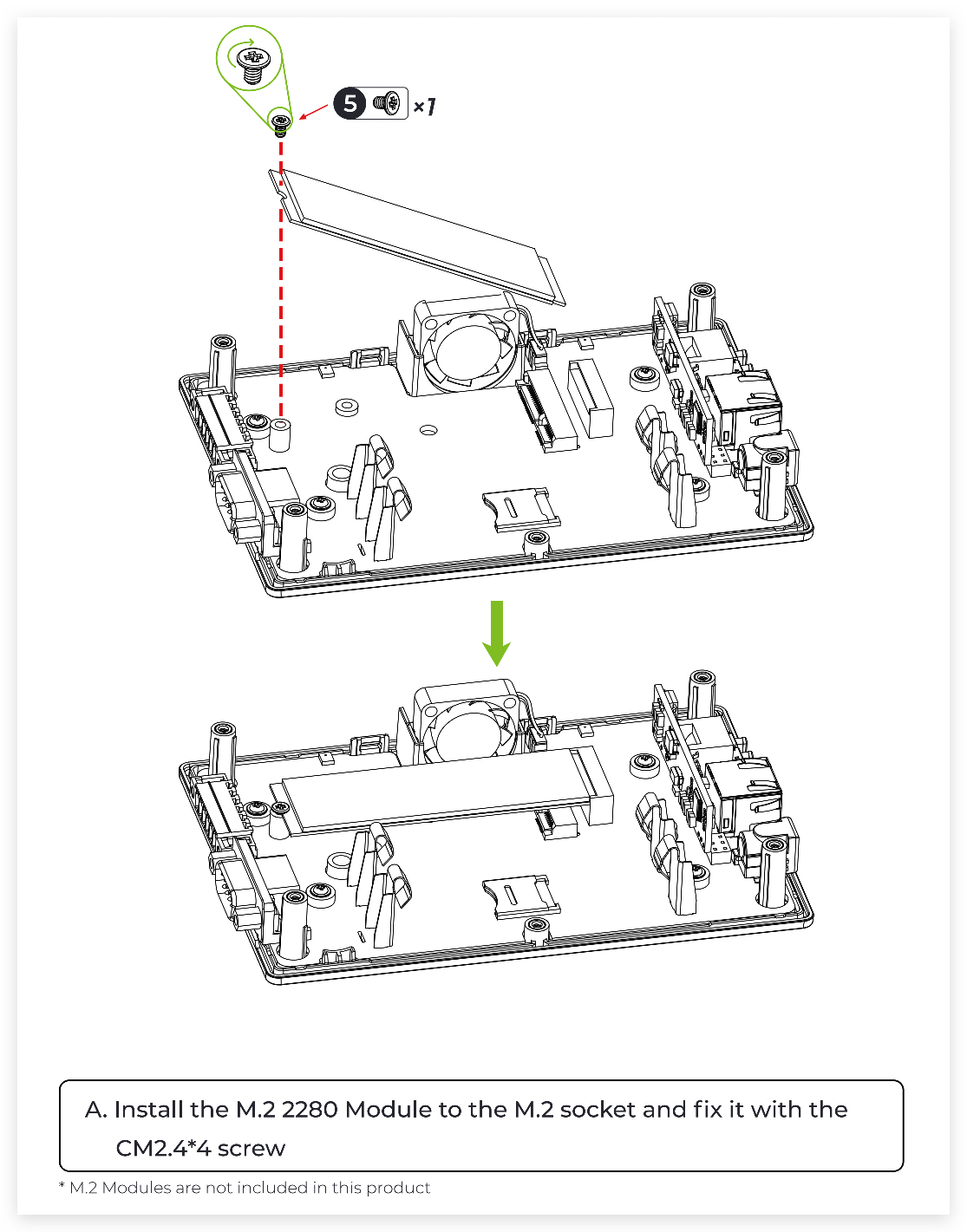

Luego gira el botón junto al ventilador a M.2.

Paso 2. Introduce el comando para ver si se detecta el dispositivo de almacenamiento SSD.
sudo fdisk -l
Paso 3. También podemos usar el comando dd para probar la velocidad de lectura y escritura del disco duro.
Read
$ sudo dd if=/dev/sda3 of=/dev/null bs=512k count=500
Write
$ sudo dd if=/dev/zero of=/dev/sda3 bs=512k count=500
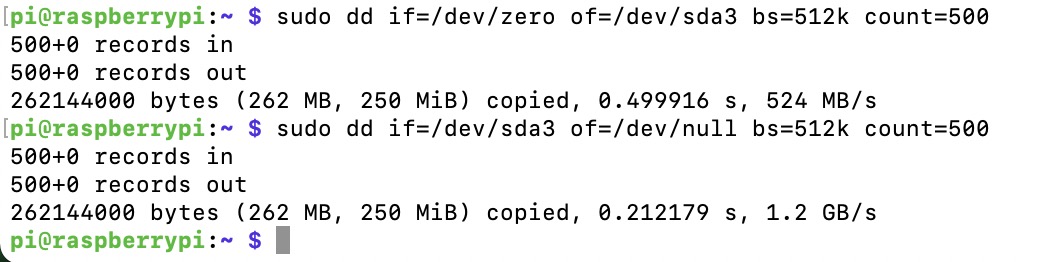
Asegúrate de que estás usando M.2 B key.
Formatear disco duro
El siguiente paso borrará todos tus datos del SSD que has conectado al reTerminal E10-1; además, si has seleccionado el medio de unidad equivocado, así que asegúrate de haber seguido cuidadosamente los pasos a continuación y de comprender el propósito de cada uno de ellos.
- Herramientas de software utilizadas:
lsblk,fdisk,mkfs,mount,umount
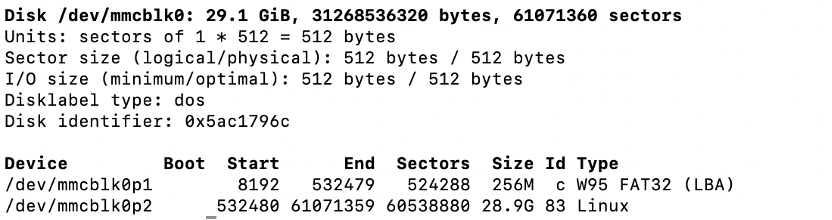
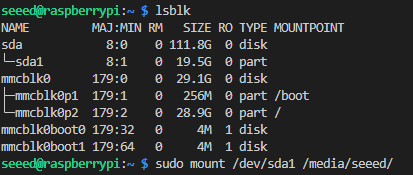
Paso 1. Encuentra el nombre de tu dispositivo SSD una vez que hayas conectado tu SSD en el reTerminal E10-1 y lo hayas conectado al reTerminal, abre la terminal una vez que el sistema se haya encendido y luego escribe el siguiente comando:
lsblk
deberías ver algo similar:
Paso 2. Usar fdisk para particionar tu SSD
Perderás los datos en el SSD que has conectado al reTerminal E10-1 después de seguir este paso.
Siguiendo los pasos anteriores, escribe el siguiente comando en la terminal, ten en cuenta el /dev/sdX donde la X es el nombre del dispositivo SSD que has elegido para formatear; asegúrate de que no haya otras unidades USB conectadas al reTerminal, a menos que estés seguro del nombre de dispositivo correcto.
sudo fdisk /dev/sdX
Por ejemplo, en mi caso:
sudo fdisk /dev/sda
deberías ver algo similar a lo que se muestra a continuación:
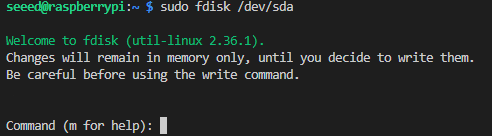
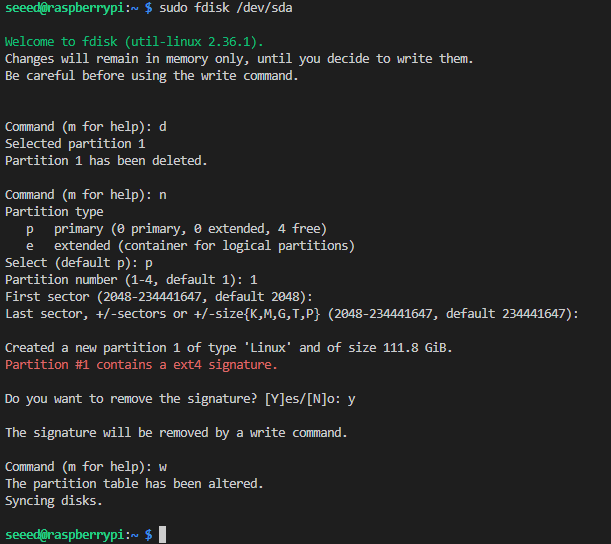
En el indicador de fdisk:
Welcome to fdisk (util-linux 2.36.1).
Changes will remain in memory only, until you decide to write them.
Be careful before using the write command.
Command (m for help):
Primero escribe d para eliminar las particiones en el dispositivo SSD.
Luego escribe n para crear una nueva partición en el dispositivo SSD.
Después de eso deberías ver el siguiente mensaje:
Partition type
p primary (0 primary, 0 extended, 4 free)
e extended (container for logical partitions)
Escribe p para crear una partición primaria, y luego 1.
Luego, para el primer sector, puedes presionar ENTER para usar por defecto el sector inicial de la unidad, o puedes especificar dónde empezar la partición 1 en tu SSD en una ubicación de sector específica. En mi caso, simplemente presioné Enter para el valor predeterminado.
Después selecciona el último sector para la partición 1; si quieres utilizar todo el espacio de la unidad para la partición 1 simplemente presiona ENTER, o puedes escribir la ubicación de sector específica para el final de la partición 1, esto también significa el tamaño de almacenamiento de la partición 1 que estás creando.
Luego presiona Y para eliminar la firma.
Después escribe w para guardar los cambios y salir del indicador de fdisk.
Aquí hay un ejemplo del proceso:
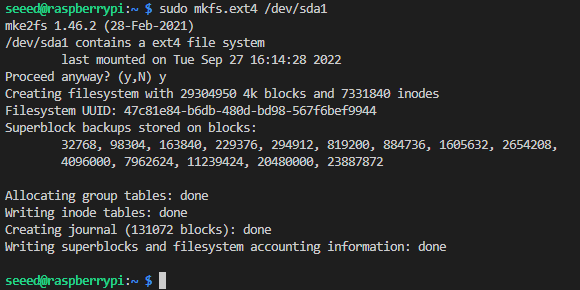
Paso 3. Formatea tu partición SSD al formato ext4 Ahora que ya has creado una o varias particiones en tu SSD, necesitas formatear la(s) partición(es) al formato ext4 para poder montarla(s) y usarla(s). Para hacerlo usando mkfs.ext4:
sudo mkfs.ext4 /dev/sdXX
de forma similar, donde sdXX es el nombre de dispositivo de tu SSD, en mi caso uso /dev/sda1 así:
sudo mkfs.ext4 /dev/sda1
y en Proceed anyway? (y,N) escribe y y ENTER, luego espera un par de segundos hasta que el proceso termine.
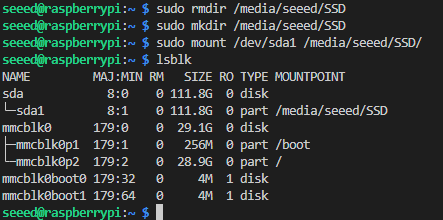
Paso 4. Montar la partición Ahora puedes montar el SSD para usarlo como disco externo para almacenamiento adicional.
sudo mkdir /media/"YOUR USER NAME"/"THE NAME YOU WANT TO MOUNT THE DRIVE"
sudo mount /dev/sdXX /media/"YOUR USER NAME"/"THE NAME YOU WANT TO MOUNT THE DRIVE"
donde "YOUR USER NAME" es el nombre de usuario de tu sistema reTerminal y "THE NAME YOU WANT TO MOUNT THE DRIVE" es el nombre que creas para montar tu unidad, /dev/sdXX es el nombre de dispositivo de la partición SSD que quieres montar.
por ejemplo, en mi caso:
sudo mkdir /media/seeed/SSD
sudo mount /dev/sda1 /media/seeed/SSD/
Para comprobar si el SSD se ha montado correctamente:
lsblk
deberías ver una salida similar a la mía, donde /dev/sda1 está montado en /media/seeed/SSD:
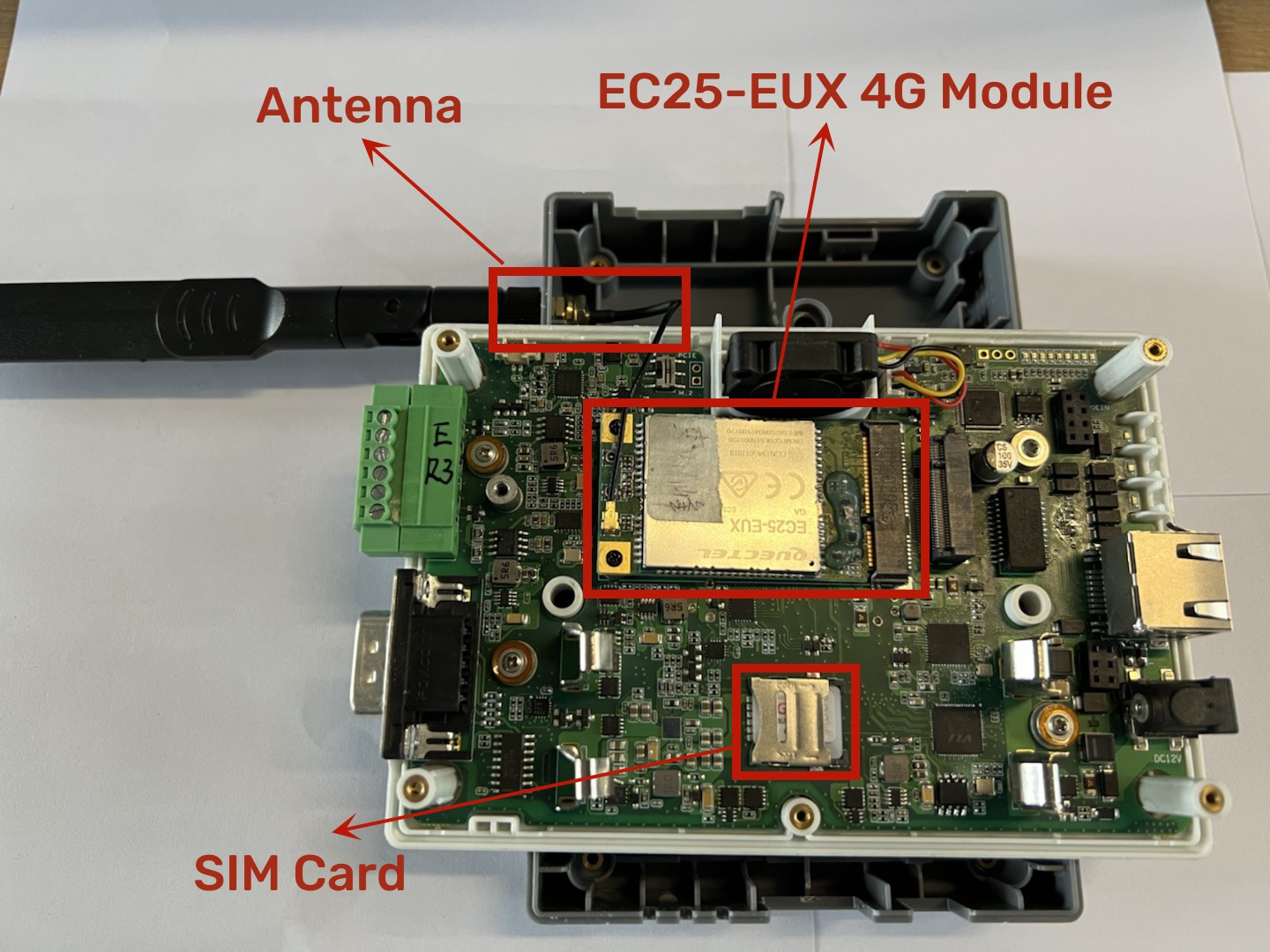
Módulo 4G EC25-EUX
Materiales requeridos
- reTerminal x1
- reTerminal E10-1 x1
- Módulo 4G EC25-EUX x1
- Tarjeta SIM x1
Paso 1. Abre la tapa trasera del reTerminal E10-1 y luego instala el EC25-EUX y la tarjeta SIM en el reTerminal E10-1.
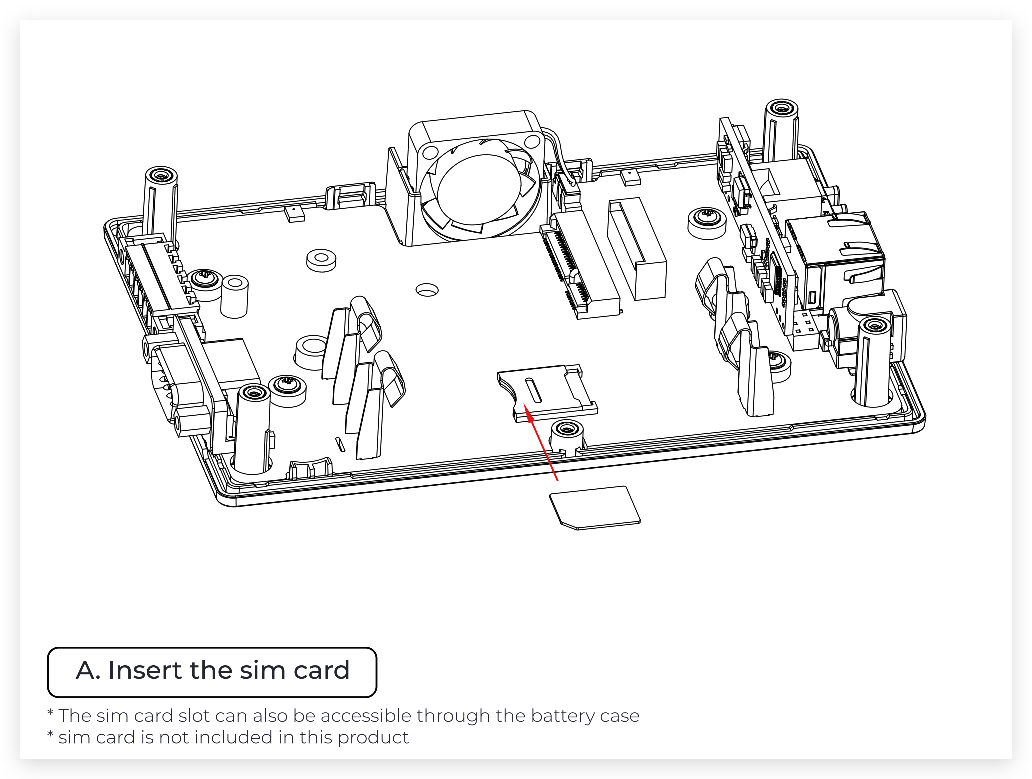
Luego gira el interruptor junto al ventilador a PCIE.
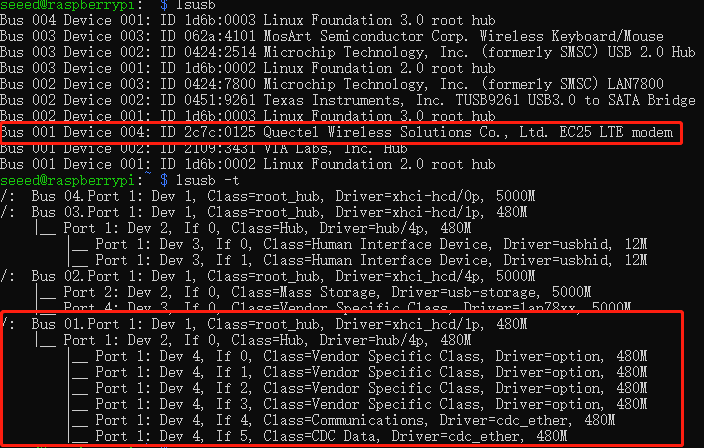
Paso 2. Comprueba si el EC25-EUX es detectado usando lsusb
lsusb
lsusb -t
Paso 3. Instala la herramienta de comunicación serie minicom.
sudo apt install minicom
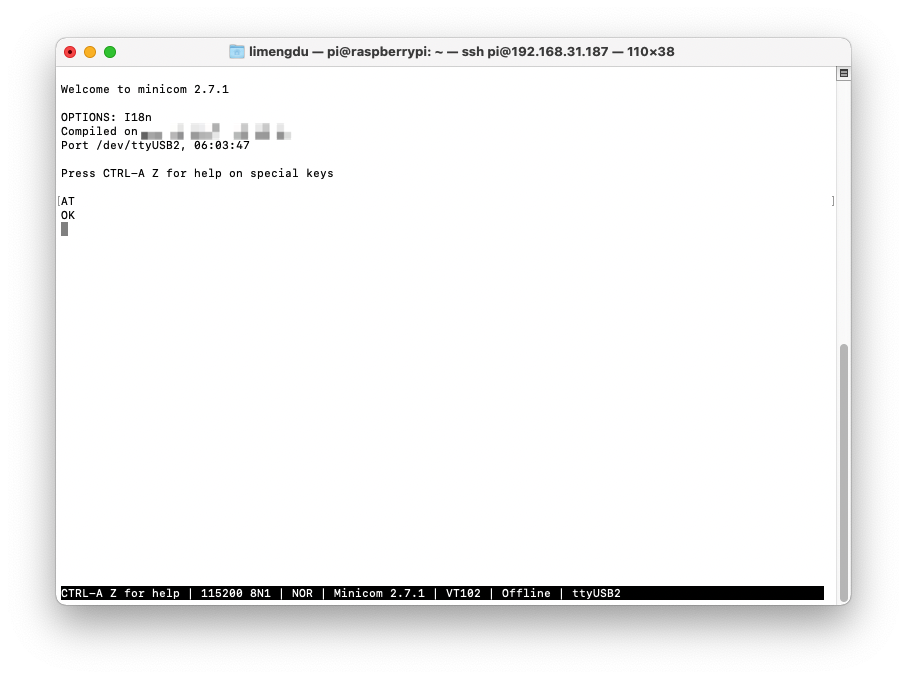
Paso 4. Conecta el módulo 4G EC25-EUX a través de minicom.
sudo minicom -D /dev/ttyUSB2 -b 1152008n1
una vez que se abra la conexión serie, escribe AT y presiona 'Enter', y deberías ver OK.
Paso 5. Habilitar el módulo 4G para conectarse a la red 4G
Por favor, coloca la tarjeta SIM habilitada para 4G en la ranura de la tarjeta SIM en el soporte de la batería Li-Po, donde la ranura de la tarjeta SIM admite tarjeta micro SIM, así que si tienes una tarjeta nano SIM necesitas encontrar un adaptador de tarjeta micro SIM para convertirla a micro SIM.
En la misma ventana serie de minicom escribe:
AT+QCFG="usbnet"
Devolverá algo como +QCFG: "usbnet",0, pero necesitamos que esté configurado a 1 (modo ECM), así que introduce el siguiente comando:
AT+QCFG="usbnet",1
Luego introduce el siguiente comando para forzar el reinicio del módem:
AT+CFUN=1,1
Después puedes reiniciar o esperar un rato para que el módulo obtenga internet de tu operador de tarjeta SIM.
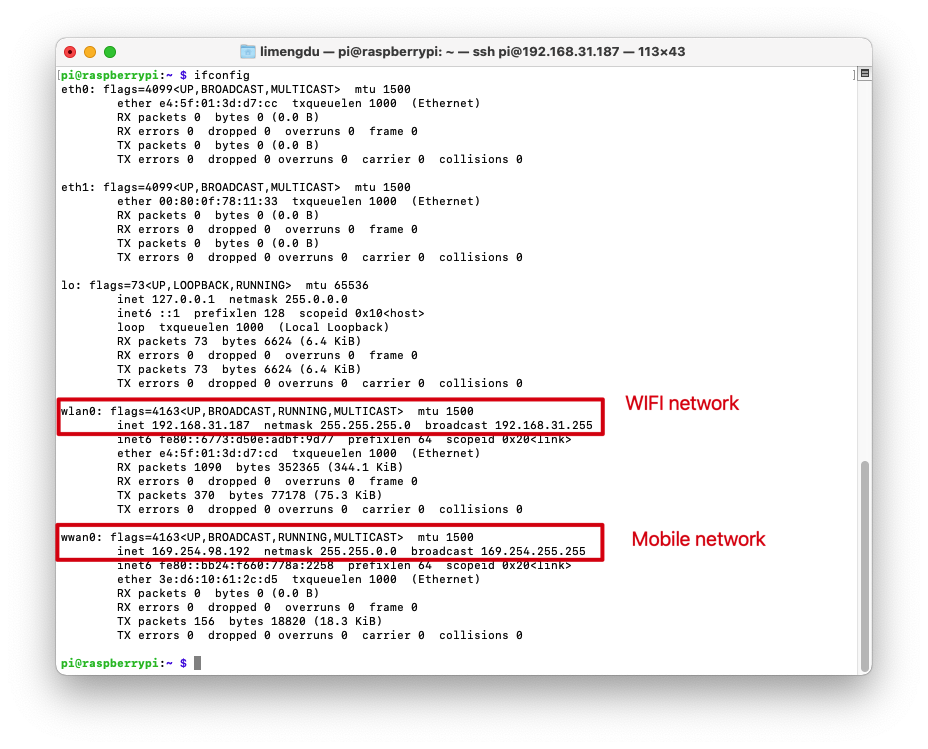
También puedes usar el comando ifconfig para consultar el estado de red de reTerminal.
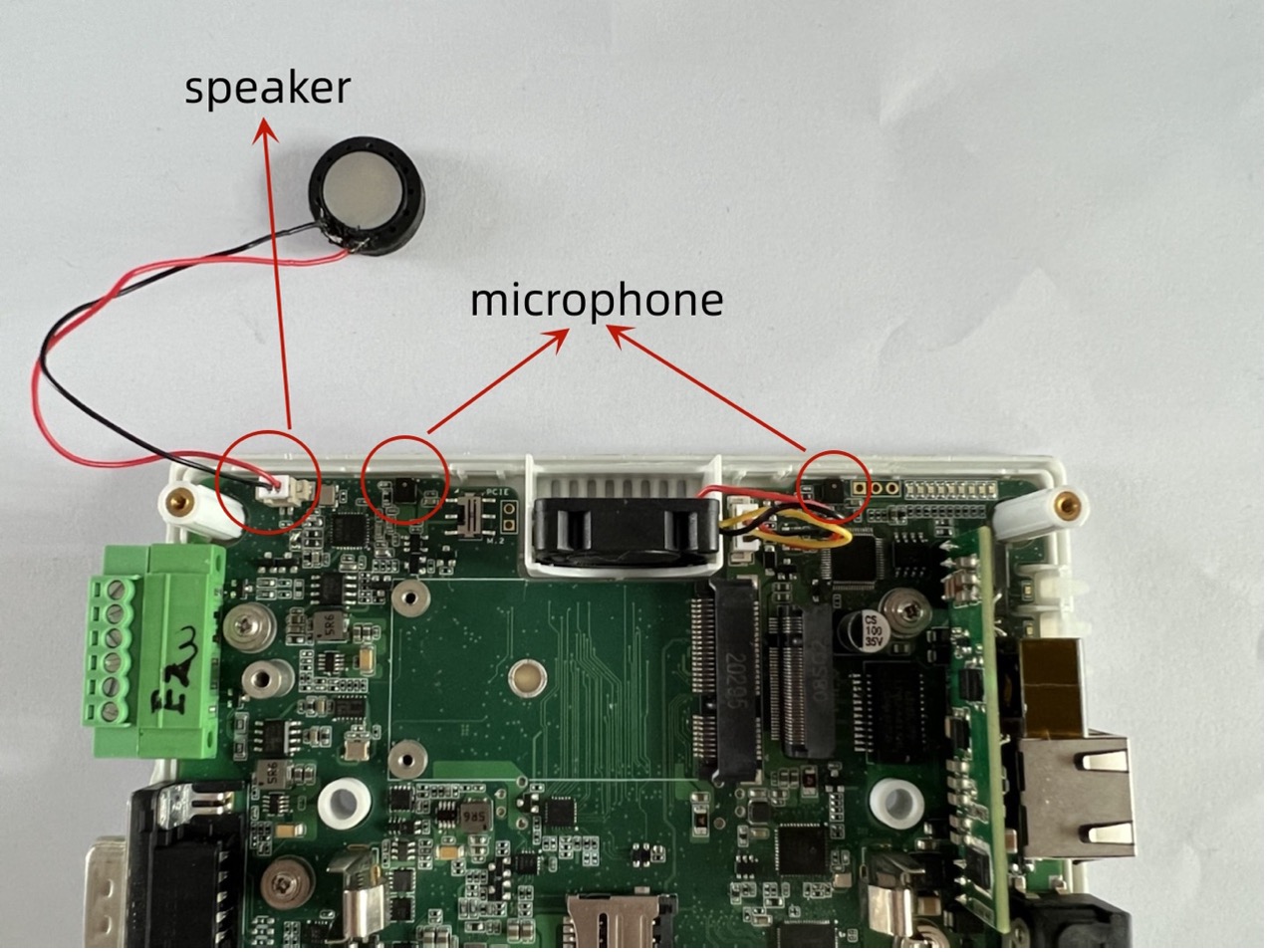
Audio
Con el fin de satisfacer las necesidades multimedia de diferentes usuarios, se instala un módulo de altavoz y dos módulos de micrófono dentro del reTermnal E10-1 para lograr las funciones de reproducción de sonido y grabación.
Materiales requeridos
- reTerminal x1
- reTerminal E10-1 x1
Paso 1. Descarga e instala el controlador.
git clone https://github.com/Seeed-Projects/seeed-voicecard.git
cd seeed-voicecard
sudo ./install.sh
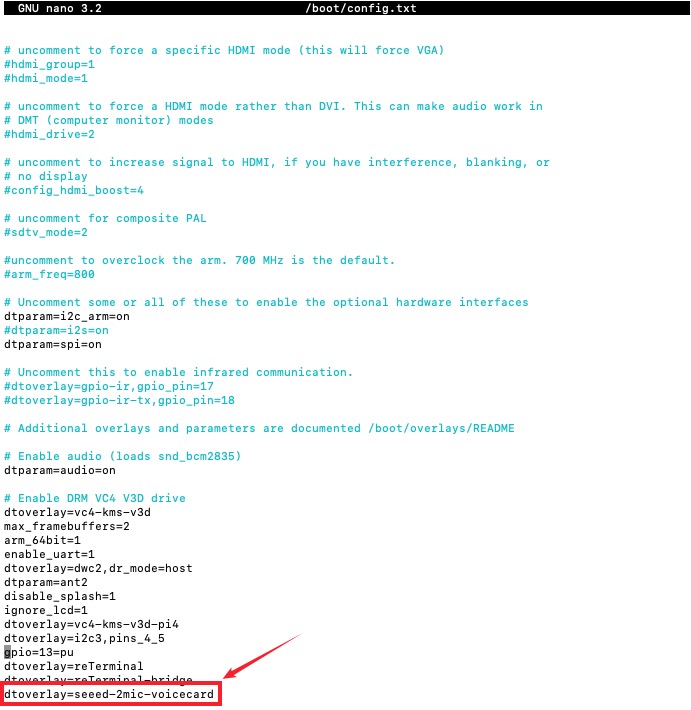
Paso 2. Añade elementos de configuración. Añade dtoverlay=seeed-2mic-voicecard a /boot/config.txt. Luego reinicia el dispositivo.
sudo sed -i '$s/$/\ndtoverlay=seeed-2mic-voicecard/' /boot/config.txt
para comprobar si has modificado /boot/config.txt puedes usar el editor de texto nano para abrir el archivo y desplazarte hasta la última línea para comprobarlo:
nano /boot/config.txt
Una vez que se haya añadido a /boot/config.txt puedes reiniciar ahora:
sudo reboot
Después de esperar al reinicio, usa el comando arecord -l para ver el dispositivo de grabación.
arecord -L

Como se muestra en la figura anterior, card 0 device 0 es el dispositivo que necesitamos usar para grabar.
Paso 3. Según la información anterior, usa el comando para realizar la operación de grabación y guardado.
arecord -Dhw:0,0 -d 10 -f cd -r 44100 -c 2 -t wav test.wav
Análisis de parámetros
- -D especifica el dispositivo de grabación, 0,0 significa card 0 device 0, que es bcm2835-i2s-wm8960-hifi wm8960-hifi-0.
- -d especifica la duración de la grabación, en segundos.
- -f especifica el formato de grabación, solo admite cd, cdr, dat.
- -r especifica la frecuencia de muestreo en Hz.
- -c especifica el número de canales.
- -t especifica el formato de archivo generado.
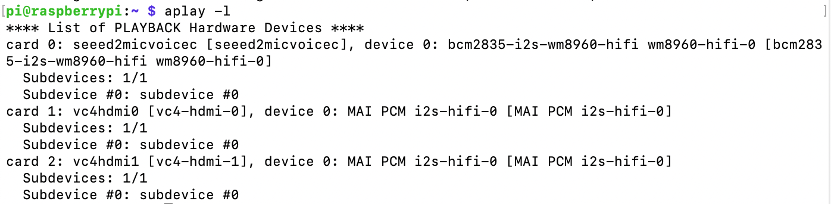
Paso 4. Comprueba el dispositivo de reproducción.
aplay -l
Paso 5. Ajusta el volumen adecuado para reproducir el sonido.
sudo alsamixer
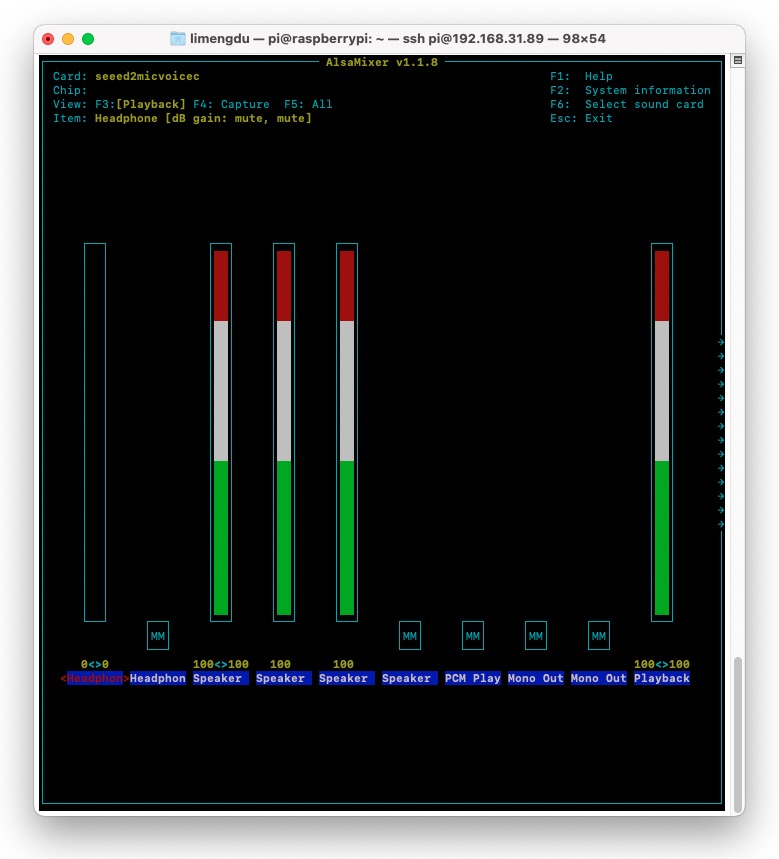
sudo aplay -Dhw:0 test.wav

Preguntas frecuentes
- ¿Qué tipo de baterías 18650 son compatibles?
Respuesta: Se recomienda Panasonic NCR18650B 3.6V 3400mAh.
- ¿Las baterías necesitan tener su propia protección de sobrecorriente/subtensión/sobretensión?
Respuesta: No, porque reTerminal E10-1 tiene un circuito de protección de batería.
- ¿Qué modelo de controlador CAN y RS485 utiliza?
Respuesta:
- Controlador 485: TP485E
- Controlador CAN: MCP2518FDT-E/QBB
- Instalé el E10 ayer, ¿es correcta la información de la batería (nivel de carga)? La muestra en rojo (0%) incluso si acabo de sacarlas del cargador.
Kernel: 5.10.103-v8+ aarch64 bits: 64 Console: tty 0 Distro: Debian GNU/Linux 10
Función de visualización de energía: aún no desarrollada, pero hemos escuchado tu opinión y programaremos el desarrollo de esta función.
- ¿La extensión reTerminal proporciona otro puerto Ethernet (separado) --> de modo que tengamos dos puertos Ethernet?
Estos dos puertos se pueden usar simultáneamente sin afectarse entre sí.
- ¿El RS232 y el RS485 son independientes/separados (a veces, en cierto hardware, solo puedes usar uno ...)?
Solo puedes usar RS232 o RS485 en un momento dado.
Soporte técnico y debate sobre el producto
Gracias por elegir nuestros productos. Estamos aquí para ofrecerte diferentes tipos de soporte y garantizar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para adaptarnos a diferentes preferencias y necesidades.