Segmentación 3D con RealSense
Descripción del dispositivo
RealSense D405

La cámara de profundidad RealSense D405 es una cámara estéreo de corto alcance diseñada para tareas de visión por computadora de cerca con precisión submilimétrica. Su rango de funcionamiento ideal es de 7 cm a 50 cm. Incorpora sensores de obturador global de alta resolución y utiliza un procesador de señal de imagen (ISP) para generar datos RGB alineados sin necesidad de un sensor RGB dedicado. Esta cámara compacta está optimizada para robótica de precisión, imágenes médicas y escenarios de inspección automatizada.
RealSense D435i

La cámara de profundidad RealSense D435i es una cámara estéreo que combina percepción de profundidad y seguimiento de movimiento, diseñada para robótica, reconstrucción 3D, SLAM y aplicaciones de percepción automatizada. Utiliza tecnología de profundidad estéreo activa y proporciona un amplio campo de visión, sensores de profundidad con obturador global, imagen en color RGB y una IMU integrada, lo que permite la salida sincronizada de datos de profundidad, color y movimiento. Esta cámara compacta es adecuada para tareas de visión por computadora de corto a medio alcance, como evitación de obstáculos para robots móviles, modelado espacial, planificación de trayectorias y percepción del entorno en tiempo real.
Introducción
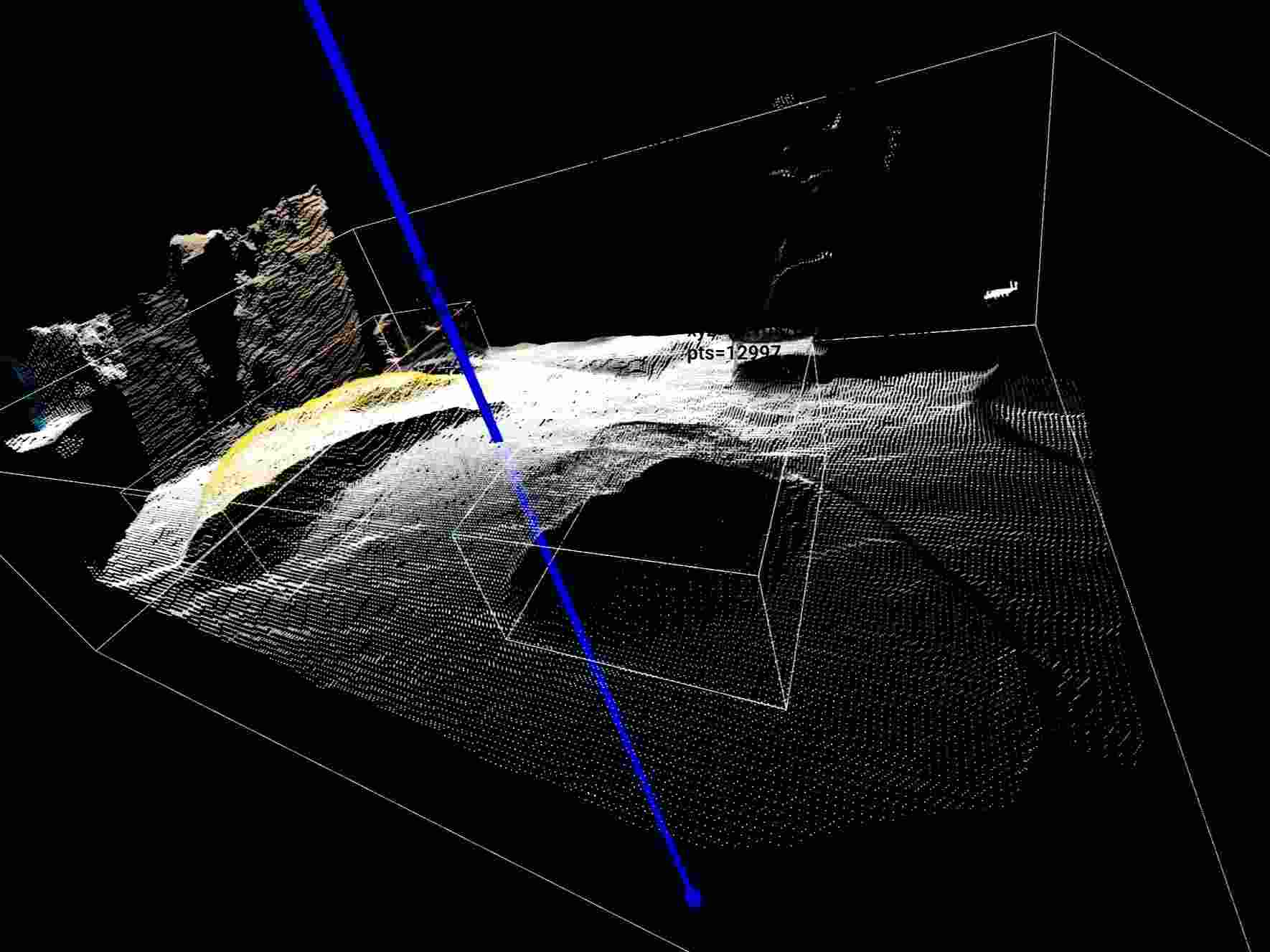
Esta demostración se basa en segmentación con OpenCV y utiliza una cámara de profundidad para la reconstrucción de nubes de puntos y la detección de objetos objetivo sobre la nube de puntos reconstruida. Produce la siguiente información:
- Categoría del objeto
- Coordenadas XYZ del centro del objeto
- Dimensiones de la caja delimitadora
- Ángulo de guiñada (yaw) de la caja delimitadora
También admite visualización mediante Open3D. Esta solución es adecuada para tareas de percepción robótica como agarre sobre mesa, localización de objetos y filtrado de poses de agarre candidatas, y puede proporcionar información geométrica 3D estable para la planificación de agarre de brazos robóticos y operaciones posteriores.
Requisitos previos
- RealSense D435i o RealSense D405
Inicio rápido
1. Obtener el código del proyecto
Primero, clona el proyecto localmente y entra en el directorio del proyecto:
git clone [email protected]:Miscanthus40076/TabletopSeg3D.git
cd TabletopSeg3D
Nota: Todos los comandos de instalación y ejecución siguientes se ejecutan desde el directorio raíz del proyecto
TabletopSeg3Dpor defecto.
2. Entorno virtual de Python
Se recomienda usar un entorno virtual de Python dedicado. La versión sugerida es Python 3.11.
Crea un entorno con conda:
conda create -n tabletopseg3d python=3.11
conda activate tabletopseg3d
Crea un entorno con venv:
python3.11 -m venv .venv
source .venv/bin/activate
3. Dependencias del sistema
Antes de ejecutar este proyecto, tu sistema debe tener instalado el Intel RealSense SDK / librealsense para admitir la adquisición de datos y el acceso al controlador de la cámara de profundidad.
Notas:
- Si solo quieres leer el código, escribir documentación o realizar análisis estático, puedes omitir por ahora esta dependencia.
- Si quieres conectar una cámara de profundidad y ejecutar realmente esta demostración, esta dependencia debe instalarse de antemano.
4. Instalar dependencias de Python
Este proyecto proporciona dos rutas de instalación recomendadas:
- Instalación por defecto en CPU
- Instalación acelerada por GPU
Puedes elegir la opción adecuada según tu hardware.
4.1 Instalación por defecto en CPU
Ejecuta el siguiente comando para instalar las dependencias del proyecto:
python -m pip install -r requirements.txt
4.2 Aceleración por GPU
Si tu dispositivo tiene una GPU NVIDIA y un entorno CUDA configurado correctamente, puedes usar la ruta de instalación con GPU para mejorar el rendimiento de inferencia de segmentación de YOLO.
Antes de continuar, asegúrate de que tu sistema cumpla los siguientes requisitos:
- El controlador de la GPU NVIDIA está instalado
- Está instalado un entorno de ejecución CUDA compatible con el controlador
- Planeas instalar compilaciones GPU de
torchytorchvisionque coincidan con tu versión de CUDA
Instala las versiones para GPU de torch y torchvision que coincidan con tu versión de CUDA:
pip install torch torchvision --index-url https://download.pytorch.org/whl/cuXXX
Donde:
- Sustituye
cuXXXpor la etiqueta real de la versión de CUDA - Algunos ejemplos comunes incluyen
cu121ycu124
5. Ejecución
5.1 Obtener el número de serie del dispositivo
python scripts/realtime_open3d_scene.py --list-devices
5.2 Iniciar el modo de visualización
Sustituye el número de serie por el número de serie real de tu dispositivo:
python scripts/realtime_open3d_scene.py \
--serial 419522072950 \
--device cpu \
--show-labels
5.3 Ejecutar sin interfaz gráfica
Si no necesitas la interfaz gráfica de Open3D y quieres obtener directamente resultados de detección estructurados para cada fotograma, puedes ejecutar en modo sin cabeza (headless):
python scripts/realtime_open3d_scene.py \
--serial 419522072950 \
--device cpu \
--frames 10 \
--no-display
En este modo, el programa genera datos JSON fotograma a fotograma, que incluyen principalmente:
- Categoría del objetivo
- Coordenadas 3D del centro del objetivo
- Dimensiones de la caja delimitadora del objetivo
- Ángulo de guiñada (yaw) de la caja delimitadora del objetivo
5.4 Parámetros recomendados para la D405
Para cámaras de profundidad de corto alcance como la D405, normalmente se recomienda estrechar el rango de profundidad válido para obtener resultados de nube de puntos más estables.
python scripts/realtime_open3d_scene.py \
--serial 409122273421 \
--device cpu \
--min-depth 0.02 \
--max-depth 0.50