Agarre visual GraspNet en Jetson con reBot Arm B601-DM
Este wiki explica cómo desplegar la demo de agarre visual reBot Arm B601-DM en NVIDIA Jetson. La demo combina una cámara RGB-D, segmentación por instancias con YOLO, estimación de poses de agarre 6-DoF con GraspNet, calibración eye-in-hand y control de robot real, de modo que el brazo pueda seleccionar y agarrar objetos comunes sobre una mesa.
La versión 1.0 de esta guía se centra en un despliegue fiable con un solo Jetson y en el flujo de operación diaria. La configuración predeterminada usa Orbbec Gemini 2 como cámara RGB-D, YOLO11n-seg TensorRT para el filtrado de objetivos y GraspNet para la generación genérica de poses de agarre 6-DoF.

| Kit reBot Arm B601-DM con Jetson Orin |
|---|
 |
Qué vas a construir
El flujo de ejecución es:
Orbbec Gemini 2 RGB-D camera
|
YOLO instance segmentation for target filtering
|
GraspNet 6-DoF grasp pose estimation
|
Eye-in-hand calibration transform
|
reBot Arm IK trajectory and gripper force control
|
Optional base rotation and object placement
El proyecto proporciona tres formas prácticas de usar el sistema:
| Modo | Punto de entrada | Uso típico |
|---|---|---|
| Interfaz web | scripts/grasp_web.py | Vídeo en vivo, selección de objetivo, vista previa de agarre, agarre real, ajuste de offset |
| CLI | scripts/grasp.py | Agarre sin pantalla o pruebas automatizadas por script |
| API HTTP | scripts/grasp_curl.sh and scripts/grasp_api_client.py | Control remoto, automatización, integración con otras aplicaciones |
Preparación de hardware y sistema
Prepara el siguiente hardware antes de empezar:
- reBot Arm B601-DM
- Dispositivo NVIDIA Jetson ejecutando JetPack 6.x o JetPack 7.x
- Cámara RGB-D Orbbec Gemini 2
- Adaptador USB2CAN para el bus CAN del robot
- Cable USB 3.0 para la cámara
- Marcador ArUco para la calibración mano-ojo,
DICT_4X4_50, ID0, longitud de arista 0.1 m - Una mesa estable, espacio libre suficiente alrededor del brazo y un método de corte de energía de emergencia
Esta demo controla un brazo robótico real. Durante todas las pruebas de movimiento y de agarre, mantén las manos, cables y objetos sueltos fuera del espacio de trabajo del brazo. Empieza con --dry-run, comprobaciones de solo lectura y valores de desplazamiento pequeños antes de habilitar la ejecución completa del robot.
Conecta el hardware:
- Conecta Gemini 2 a Jetson mediante USB 3.0.
- Conecta el adaptador USB2CAN al bus CAN de reBot Arm y luego a Jetson.
- Enciende reBot Arm.
- Confirma que los dispositivos son visibles:
lsusb
ls /dev/ttyUSB* /dev/ttyACM* 2>/dev/null || true
Establece permisos temporales de dispositivo para la primera puesta en marcha:
sudo chmod a+rw /dev/bus/usb/*/*
sudo chmod 666 /dev/ttyUSB0 2>/dev/null || true
sudo chmod 666 /dev/ttyACM0 2>/dev/null || true
Para dispositivos serie, también se recomienda añadir el usuario actual a dialout, luego cerrar sesión y volver a iniciarla:
sudo usermod -aG dialout $USER
Desplegar el proyecto en Jetson
Paso 1. Instalar paquetes de sistema y Miniconda
sudo apt update
sudo apt install -y git wget curl build-essential cmake libusb-1.0-0-dev python3-pip
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
bash Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc
Paso 2. Clonar el proyecto
git clone https://github.com/jjjadand/reBot-DevArm-Grasp.git rebot_grasp-jetson
cd rebot_grasp-jetson
Si estás usando un paquete interno en lugar del repositorio público, copia ese directorio de proyecto a Jetson y ejecuta los comandos restantes desde la raíz del proyecto.
Paso 3. Crear el entorno de Python
Usa Python 3.10 en JetPack 6.x. Usa Python 3.12 en JetPack 7.x / Thor.
# JetPack 6.x
conda create -y -n graspnet python=3.10
# JetPack 7.x / Thor
# conda create -y -n graspnet python=3.12
conda activate graspnet
python -m pip install -U pip wheel setuptools
Comprueba tus versiones de JetPack y CUDA:
cat /etc/nv_tegra_release
nvcc --version
Paso 4. Instalar PyTorch compatible con Jetson
No instales el paquete genérico PyTorch CPU/GPU de PyPI en Jetson. Instala un wheel que coincida con tus versiones de JetPack, Python y CUDA. Para usuarios de reComputer, también puedes seguir la guía dedicada: Install Pytorch for reComputer Jetson.
Los puntos de partida habituales son:
# JetPack 6.x, CUDA 12.x, Python 3.10
pip install --extra-index-url https://pypi.jetson-ai-lab.io/jp6/cu126 torch torchvision
# JetPack 7.x / Thor, CUDA 13.x, Python 3.12
pip install --extra-index-url https://pypi.jetson-ai-lab.io/sbsa/cu130 torch torchvision
Verifica CUDA desde Python:
python - <<'PY'
import torch
print("torch:", torch.__version__)
print("cuda available:", torch.cuda.is_available())
print("device:", torch.cuda.get_device_name(0) if torch.cuda.is_available() else "none")
PY
cuda available debe ser True antes de continuar.
Paso 5. Instalar dependencias de Python
pip install -r requirements-graspnet-jetson.txt
Paso 6. Instalar los SDK de robot, GraspNet y GraspNet API
mkdir -p sdk
git clone https://github.com/vectorBH6/reBotArm_control_py.git sdk/reBotArm_control_py
pip install -e sdk/reBotArm_control_py
git clone https://github.com/graspnet/graspnet-baseline.git sdk/graspnet-baseline
git clone https://github.com/graspnet/graspnetAPI.git sdk/graspnetAPI
pip install -e sdk/graspnetAPI
Descarga el checkpoint preentrenado de GraspNet desde la página de descargas de GraspNet y colócalo aquí:
sdk/graspnet-baseline/checkpoints/checkpoint-rs.tar
Paso 7. Establecer rutas de CUDA y compilar los operadores CUDA de GraspNet
Establece la ruta de CUDA para tu versión de JetPack:
# JetPack 6.x example
export CUDA_HOME=/usr/local/cuda-12.6
# JetPack 7.x / Thor example
# export CUDA_HOME=/usr/local/cuda-13.0
export PATH="$CUDA_HOME/bin:$PATH"
export LD_LIBRARY_PATH="$CUDA_HOME/lib64:$LD_LIBRARY_PATH"
Compila las extensiones CUDA usadas por GraspNet:
bash scripts/install_graspnet_cuda_ops.sh
bash scripts/install_graspnet_cuda_ops.sh --check
Si más adelante cambias JetPack, Python, CUDA o PyTorch, vuelve a compilar con:
bash scripts/install_graspnet_cuda_ops.sh --force
Paso 8. Instalar el SDK de la cámara Orbbec
El proyecto incluye un asistente que instala pyorbbecsdk2 en el entorno de Python activo:
bash scripts/install_pyorbbecsdk.sh
Si necesitas compilar el SDK localmente, clona primero el árbol de código fuente y ejecuta el modo de código fuente:
git clone https://github.com/orbbec/pyorbbecsdk.git sdk/pyorbbecsdk
bash scripts/install_pyorbbecsdk.sh --from-source
Instala las reglas udev de Orbbec cuando el árbol de código fuente del SDK esté disponible:
sudo bash sdk/pyorbbecsdk/scripts/env_setup/install_udev_rules.sh
sudo udevadm control --reload-rules
sudo udevadm trigger
Paso 9. Descargar pesos de YOLO y exportar TensorRT en el Jetson de destino
Los archivos de motor TensorRT son específicos del dispositivo. Exporta siempre el .engine en el Jetson que ejecutará la demo.
mkdir -p models
wget https://github.com/ultralytics/assets/releases/download/v8.3.0/yolo11n-seg.pt -O models/yolo11n-seg.pt
yolo export model=models/yolo11n-seg.pt format=engine imgsz=640 half=True device=0 workspace=4
La salida esperada es:
models/yolo11n-seg.engine
Si la exportación FP16 falla en tu plataforma, exporta sin half=True:
yolo export model=models/yolo11n-seg.pt format=engine imgsz=640 device=0 workspace=4
Verificar y calibrar
Ejecuta estas comprobaciones en orden antes de intentar un agarre real.
1. Comprobar la cámara RGB-D
conda activate graspnet
cd ~/rebot_grasp-jetson
python scripts/verify_pyorbbec_stream.py
python scripts/verify_pyorbbec_stream.py --preview --seconds 10
La comprobación solo texto debe informar de la información de los fotogramas RGB y de profundidad. La comprobación con vista previa debe mostrar ventanas RGB y de profundidad cuando haya una pantalla de escritorio disponible.
2. Comprobar la conexión del robot
Empieza con el modo de solo lectura:
python scripts/verify_rebot_arm_motion.py --read-only
Luego ejecuta un pequeño movimiento de la articulación 6 después de confirmar que la trayectoria del brazo está despejada:
python scripts/verify_rebot_arm_motion.py --deg 5
3. Comprobar la pila de GraspNet
python scripts/verify_graspnet_stack.py
Si la cámara aún no está conectada pero solo quieres comprobar Python, CUDA, GraspNet y los archivos de YOLO:
python scripts/verify_graspnet_stack.py --skip-camera
4. Realizar la calibración eye-in-hand
Este proyecto usa calibración eye-in-hand: la cámara está montada en el efector final y el marcador ArUco está fijo en la mesa. La configuración predeterminada espera un marcador DICT_4X4_50, ID 0, de 0.1 m. El repositorio incluye archivos de marcadores imprimibles como aruco100x100.pdf.
Recogida automática:
python scripts/collect_handeye_eih.py
Recogida manual con compensación de gravedad:
python scripts/collect_handeye_eih.py --manual
Los resultados de la calibración se guardan en el directorio de la cámara activa:
config/calibration/orbbec_gemini2/hand_eye.npz
config/calibration/orbbec_gemini2/intrinsics.npz
Verifica la calibración guardada:
python scripts/verify_handeye_calibration.py
Recalibra siempre que cambie el soporte de la cámara, el efector final, el tamaño de la placa ArUco o la geometría de la mesa.
Ejecutar la demostración Web
La interfaz Web es la primera interfaz de usuario recomendada. Proporciona vídeo MJPEG en vivo, selección de objetivo, vista previa de agarre, ejecución real de agarre, ajuste de compensación, movimiento manual de la base, control del efector final, postura de preparado y operaciones de reinicio.
Empieza primero en modo de vista previa. Esto no ejecuta movimiento real del robot:
conda activate graspnet
cd ~/rebot_grasp-jetson
python scripts/grasp_web.py \
--host 0.0.0.0 \
--port 8090 \
--num-point 12000 \
--cloud-crop-nsample 32
Abre la interfaz Web desde un navegador:
http://<jetson_ip>:8090
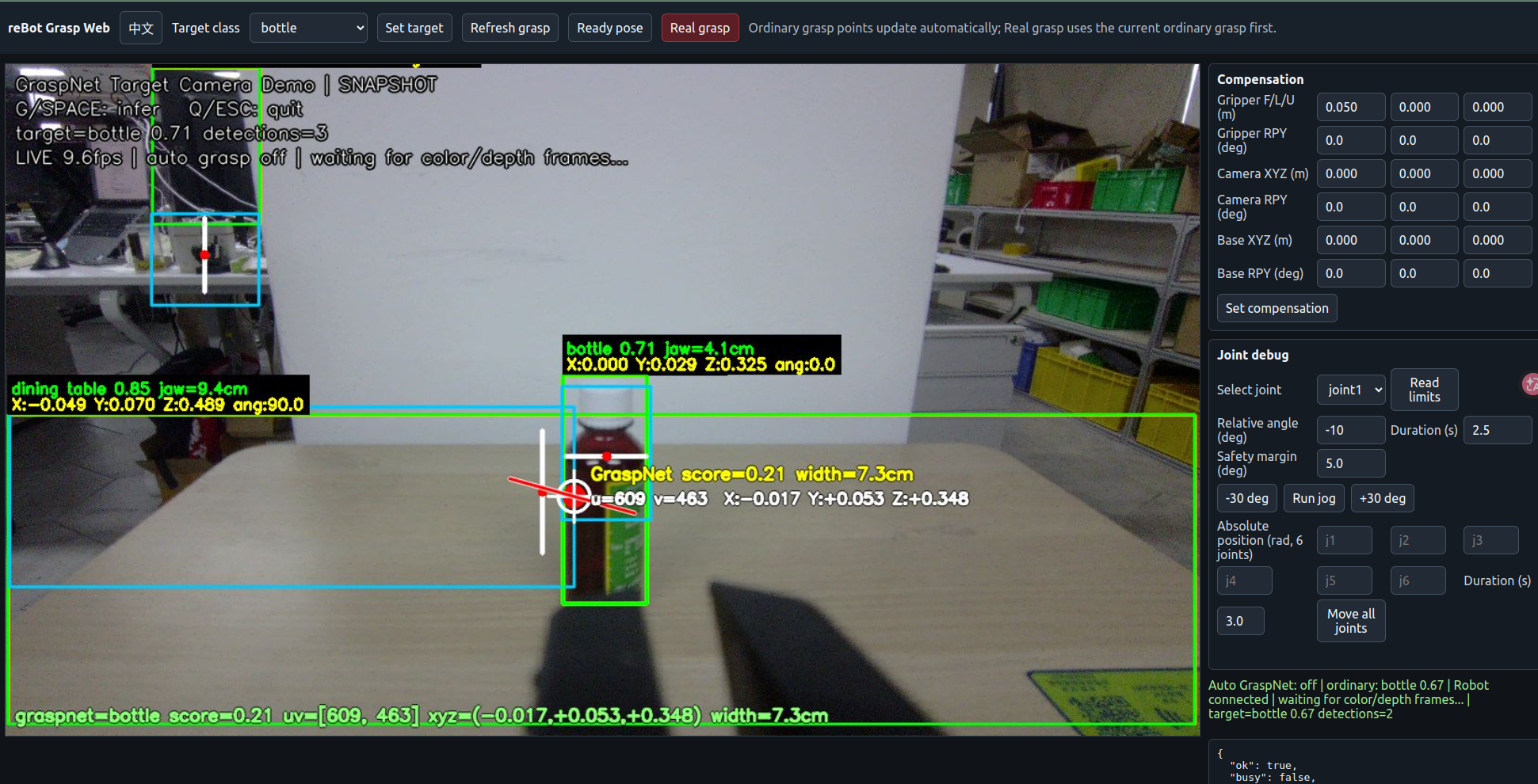
Utiliza el modo de vista previa para confirmar el flujo de la cámara, las detecciones de YOLO, el filtrado de objetivos y la generación de puntos de agarre. Haz clic en el control de inferencia o actualización en la interfaz Web para actualizar la vista previa de GraspNet.
Cuando la escena sea estable y los pasos de verificación se hayan superado, comienza con la ejecución real del robot:
python scripts/grasp_web.py \
--host 0.0.0.0 \
--port 8090 \
--enable-robot \
--num-point 12000 \
--cloud-crop-nsample 32
Para las primeras pruebas reales, desactiva la colocación posterior al agarre para que el brazo solo realice el agarre y el movimiento de recuperación:
python scripts/grasp_web.py \
--host 0.0.0.0 \
--port 8090 \
--enable-robot \
--no-place-after-grasp \
--num-point 12000 \
--cloud-crop-nsample 32
Opciones de inicio útiles:
| Opción | Propósito |
|---|---|
--enable-robot | Permitir movimiento real del brazo y del efector final |
--target-class cup | Preseleccionar una clase objetivo |
--no-yolo | Desactivar el filtrado de YOLO y ejecutar GraspNet en toda la escena |
--camera-type orbbec_gemini2 | Forzar el controlador de la cámara |
--no-place-after-grasp | Omitir la rotación de la base y la colocación después del agarre |
--num-point 12000 | Reducir el número de puntos de GraspNet para la memoria de Jetson |
--cloud-crop-nsample 32 | Reducir las muestras de CloudCrop para la memoria de Jetson |
--graspnet-interval 2.0 | Establecer el intervalo de actualización automática de GraspNet cuando esté habilitado |
El flujo de trabajo normal de la interfaz Web es:
- Haz clic en Ready para mover el brazo a la postura de preparado.
- Selecciona una clase objetivo o déjala vacía para usar los objetos detectados.
- Haz clic en Infer o Refresh para calcular una postura de agarre.
- Comprueba que el marcador de agarre parezca razonable en el vídeo.
- Ajusta el efector final, la cámara o la compensación de la base si es necesario.
- Haz clic en Real Grasp solo cuando la trayectoria del brazo esté despejada.
- Usa Reset si la escena cambia o el robot necesita volver a un estado seguro.
Los valores de compensación se utilizan para corregir pequeños errores mecánicos y de calibración. Después de ajustarlos en la interfaz Web, persiste los valores en config/compensation.json o copia los valores estables en tus notas de despliegue. Usa incrementos pequeños, por ejemplo 0.005 m para desplazamientos de posición y de 1 a 2 grados para desplazamientos de rotación.
Uso de CLI y API
Para una ejecución de prueba sin interfaz gráfica, usa:
python scripts/grasp.py --dry-run --camera-type orbbec_gemini2 --target-class cup
Para GraspNet en toda la escena sin filtrado de YOLO:
python scripts/grasp.py --dry-run --camera-type orbbec_gemini2 --no-yolo
Para ejecución real desde la CLI:
python scripts/grasp.py --camera-type orbbec_gemini2 --target-class cup
Desactiva la colocación durante la puesta en marcha con CLI:
python scripts/grasp.py \
--camera-type orbbec_gemini2 \
--target-class cup \
--no-place-after-grasp
Para inspeccionar la salida en vivo de GraspNet sin ejecutar el robot:
python scripts/graspnet_camera_demo.py --auto --target-class cup
python scripts/graspnet_camera_demo.py --auto --no-yolo --no-visualizer
Para automatización HTTP, inicia el servicio Web con el asistente:
bash scripts/grasp_curl.sh serve --enable-robot --no-auto-graspnet
En otra terminal:
bash scripts/grasp_curl.sh state
bash scripts/grasp_curl.sh ready
bash scripts/grasp_curl.sh target bottle
bash scripts/grasp_curl.sh infer
bash scripts/grasp_curl.sh grasp
bash scripts/grasp_curl.sh reset
Las mismas operaciones se pueden llamar directamente con curl:
BASE=http://127.0.0.1:8090
curl -s "$BASE/state"
curl -s -X POST "$BASE/ready" -H "Content-Type: application/json" -d "{}"
curl -s -X POST "$BASE/target" -H "Content-Type: application/json" -d '{"class_name":"bottle"}'
curl -s -X POST "$BASE/infer" -H "Content-Type: application/json" -d "{}"
curl -s -X POST "$BASE/grasp" -H "Content-Type: application/json" -d "{}"
Otros endpoints útiles:
| Endpoint | Método | Propósito |
|---|---|---|
/state | GET | Estado actual de detección, agarre y ejecución Web |
/robot/state | GET | Articulaciones del robot, postura TCP, estado del efector final |
/stream.mjpg | GET | Flujo de cámara MJPEG |
/compensation | POST | Establecer compensación del efector final, cámara y base |
/joint/limits | GET | Leer posiciones y límites de las articulaciones |
/joint/jog | POST | Mover una articulación, a menudo joint1 para pruebas de base |
/move/joints | POST | Mover todas las articulaciones a posiciones absolutas |
/move/pose | POST | Mover el TCP a una postura objetivo mediante IK o modo de trayectoria |
/gripper | POST | Abrir, cerrar, liberar o leer el estado del efector final |
/auto_grasp | POST | Ejecutar un ciclo en segundo plano de búsqueda de objetivo y agarre |
Configuración y ajuste
El archivo de configuración principal es:
config/default.yaml
Ajustes predeterminados de la cámara:
camera:
type: orbbec_gemini2
color_width: 1280
color_height: 720
depth_width: 1280
depth_height: 720
fps: 30
Ajustes predeterminados de detección y de GraspNet:
yolo:
model_name: "yolo11n-seg.engine"
device: "auto"
graspnet:
checkpoint: "checkpoint-rs.tar"
Comportamiento de colocación predeterminado:
grasp_pipeline:
place:
enabled: true
base_joint: joint1
base_delta_deg: 90.0
base_direction: auto
base_rotate_duration: 2.5
base_safety_margin_deg: 5.0
return_home: false
Si el efector final falla sistemáticamente al sujetar el objeto, ajusta en este orden:
| Síntoma | Primer objetivo de ajuste |
|---|---|
| El efector final queda demasiado adelantado o retrasado | grasp_forward_offset / avance del efector final en la Web |
| El efector final falla a la izquierda o a la derecha | grasp_lateral_offset o compensación X/Y de la cámara |
| El efector final queda demasiado alto o bajo | grasp_vertical_offset o compensación Z de la cámara |
| El ángulo de la muñeca es incorrecto | Compensación de giro, cabeceo y guiñada del efector final |
| Todos los agarres se desplazan en la misma dirección | Compensación de la cámara o de la base |
Vídeo de demostración
Solución de problemas
torch.cuda.is_available() devuelve False: vuelve a instalar una rueda de PyTorch que coincida con JetPack. El paquete genérico torch de PyPI no es adecuado para despliegue en Jetson.
No module named pointnet2._ext o No module named knn_pytorch.knn_pytorch: vuelve a compilar los operadores CUDA de GraspNet:
bash scripts/install_graspnet_cuda_ops.sh --force
pyorbbecsdk import failed o la cámara no puede abrirse: vuelve a instalar el SDK y comprueba los permisos USB:
bash scripts/install_pyorbbecsdk.sh
sudo chmod a+rw /dev/bus/usb/*/*
python scripts/verify_pyorbbec_stream.py
El archivo .engine de YOLO no se carga: vuelve a exportarlo en el mismo Jetson. No se deben copiar archivos de motor entre modelos de Jetson, versiones de JetPack o versiones de TensorRT.
El marcador ArUco no se detecta: confirma que el diccionario del marcador es DICT_4X4_50, el ID es 0, la longitud del borde del marcador es 0.1 m, la iluminación es estable y el marcador está plano y completamente visible.
El robot se conecta pero el movimiento falla: ejecuta verify_rebot_arm_motion.py --read-only, confirma el dispositivo USB2CAN, comprueba la alimentación de los motores y prueba un pequeño movimiento de --deg 5 antes de volver a intentar la ejecución de agarre.
GraspNet se queda sin memoria: reduce --num-point, reduce --cloud-crop-nsample, cierra aplicaciones de escritorio y evita ejecutar varios procesos de inferencia pesados al mismo tiempo.
Recursos
- Referencia de la demostración GraspNet de reBot Arm: https://github.com/EclipseaHime017/reBot-DevArm-Grasp
- SDK de reBot Arm: https://github.com/vectorBH6/reBotArm_control_py
- GraspNet baseline: https://github.com/graspnet/graspnet-baseline
- GraspNet API: https://github.com/graspnet/graspnetAPI
- Orbbec pyorbbecsdk: https://github.com/orbbec/pyorbbecsdk
- Instalar Pytorch para reComputer Jetson: https://wiki.seeedstudio.com/es/install_torch_on_recomputer/
Soporte técnico y debate sobre el producto
Gracias por elegir nuestros productos. Ofrecemos varios canales de soporte para preguntas, debates e informes de incidencias.