Introducción a reBot Arm B601 × NVIDIA Jetson
Introducción
Una plataforma de desarrollo de IA incorporada todo en uno para la nueva era de la IA física. A medida que la IA generativa evoluciona de simplemente “entender el mundo” a “interactuar con el mundo” de forma activa, el desarrollo de la robótica está entrando en una nueva era: la IA física. Para ayudar a desarrolladores, investigadores y educadores a acelerar su camino hacia la IA incorporada, Seeed Studio combina el reBot Arm B601 totalmente de código abierto con el vanguardista Kit de Desarrollo NVIDIA Jetson para crear un potente kit de desarrollo robótico de próxima generación.
Este kit no solo ofrece capacidades precisas de manipulación robótica, sino también la enorme potencia de cómputo de IA necesaria para ejecutar modelos de IA multimodal, modelos de visión y lenguaje (VLM) e inferencia robótica en tiempo real localmente en el borde. Es una plataforma completa para construir la próxima ola de robots inteligentes, desde el aprendizaje y la investigación hasta la creación rápida de prototipos y el despliegue.
| reBot Arm B601 DM | reBot Arm B601 RS |
|---|---|
 |  |
| Kit de Desarrollo NVIDIA® Jetson AGX Thor™ | reComputer Classic J3011 |
 |  |
Aquí usamos el NVIDIA Jetson Thor como ejemplo para demostrar cómo controlar rápidamente el brazo robótico reBot Arm B601 con Jetson. También puedes elegir otros dispositivos Jetson según tus necesidades específicas.
¿Por qué este kit?
Una plataforma completa de desarrollo de IA incorporada
El desarrollo robótico tradicional suele presentar varias limitaciones:
- Ecosistemas de hardware cerrados
- Potencia de cómputo de IA insuficiente
- Pilas de software fragmentadas
- Altas barreras de desarrollo
- Dificultad para validar escenarios reales de IA física
El kit reBot Arm × Jetson está diseñado para resolver estos desafíos.
Con este kit, obtienes:
- Una plataforma de brazo robótico totalmente de código abierto con 6+1 GDL
- La plataforma insignia de cómputo de IA en el borde de NVIDIA impulsada por GPU
- Compatibilidad nativa con ROS1, ROS2, Isaac Sim y LeRobot
- Preparado para flujos de trabajo de IA multimodal e IA generativa
- Un entorno unificado para educación, investigación y creación de prototipos de robótica con IA
Primeros pasos
Conexión de hardware
- Consulta esta guía para ensamblar el brazo robótico.
- Usa un adaptador USB-a-CAN para conectar el brazo robótico al NVIDIA Jetson mediante la interfaz Type-C.
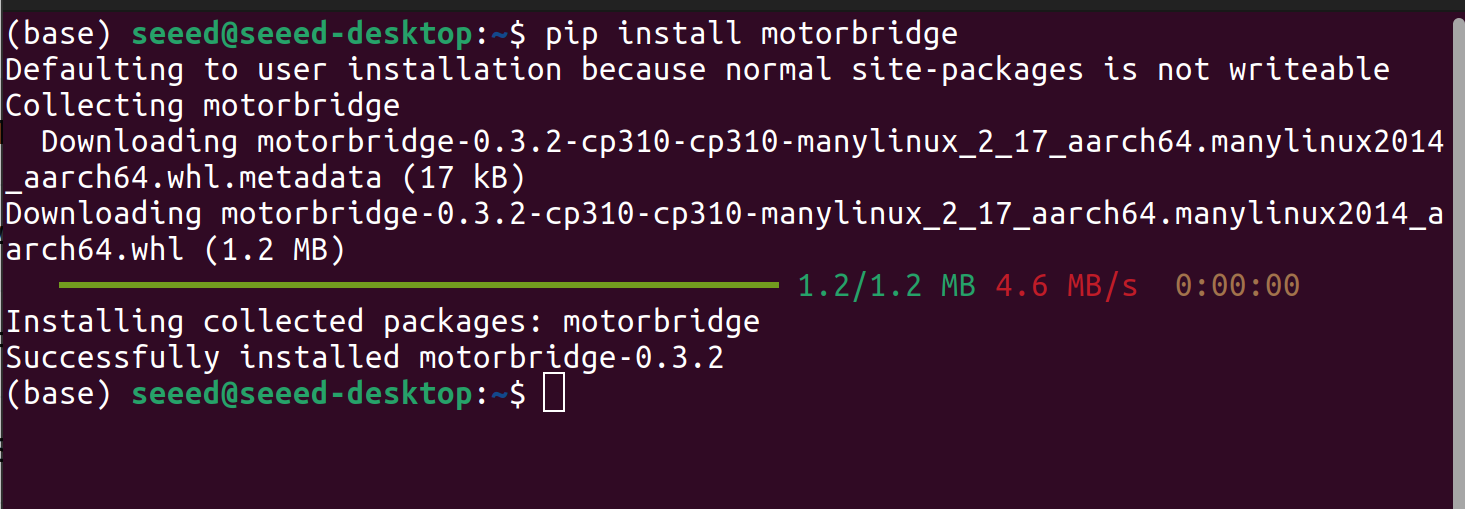
Instalación del controlador del brazo con un clic
Abre la ventana de la terminal en el Jetson y ejecuta el siguiente comando.
uv pip install motorbridge
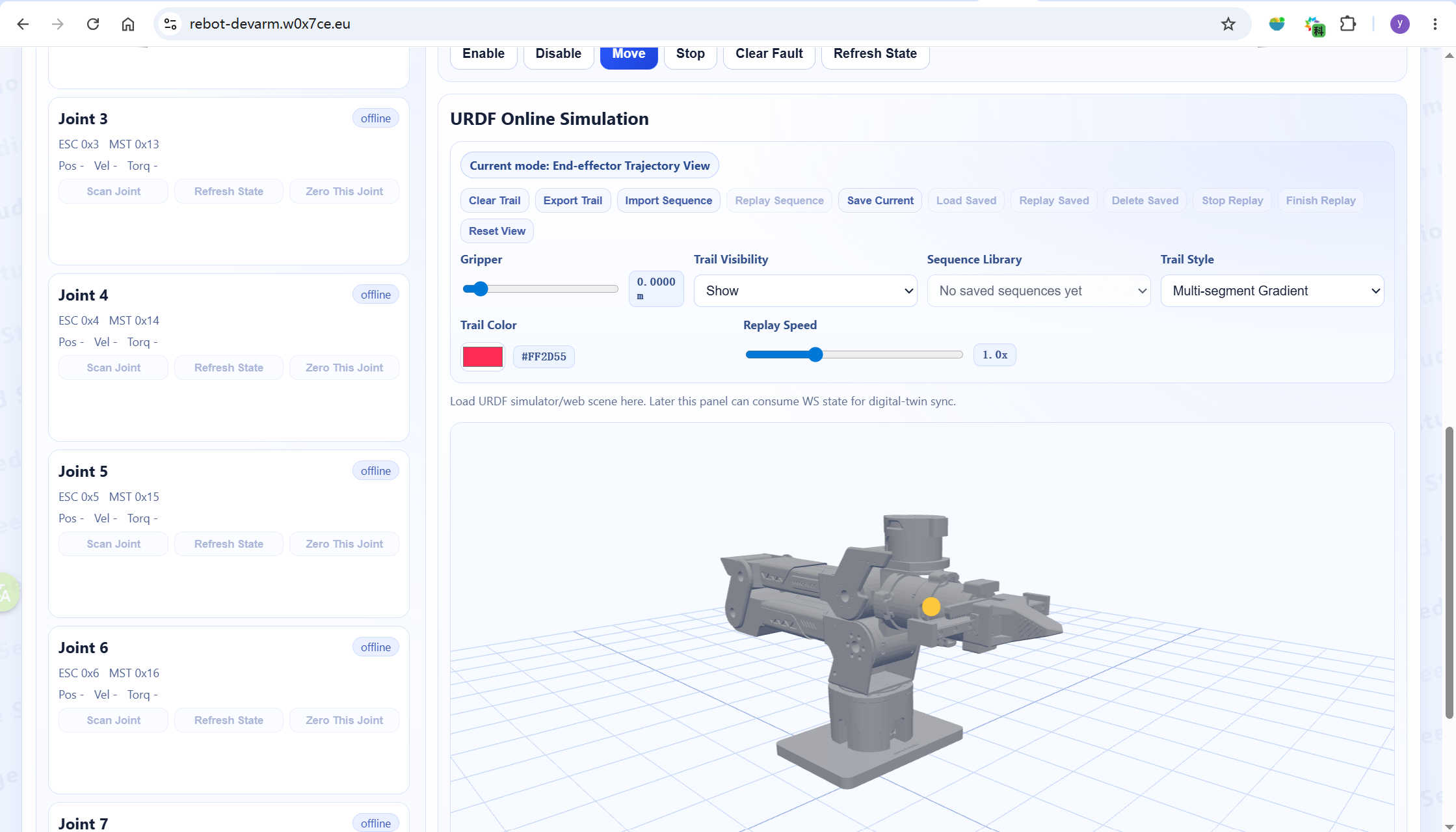
WebUI
Ejecuta este comando en Nvidia Jetson:
motorbridge-gateway --bind 127.0.0.1:9002 --vendor damiao --transport dm-serial --serial-port /dev/ttyACM0 --serial-baud 921600 --dt-ms 20
Luego, abre https://motorbridge.github.io/motorbridge-studio/ en tu navegador y verás la siguiente página. Desde esta interfaz, puedes ajustar los parámetros del motor, comprobar el estado del brazo robótico y realizar otras operaciones.
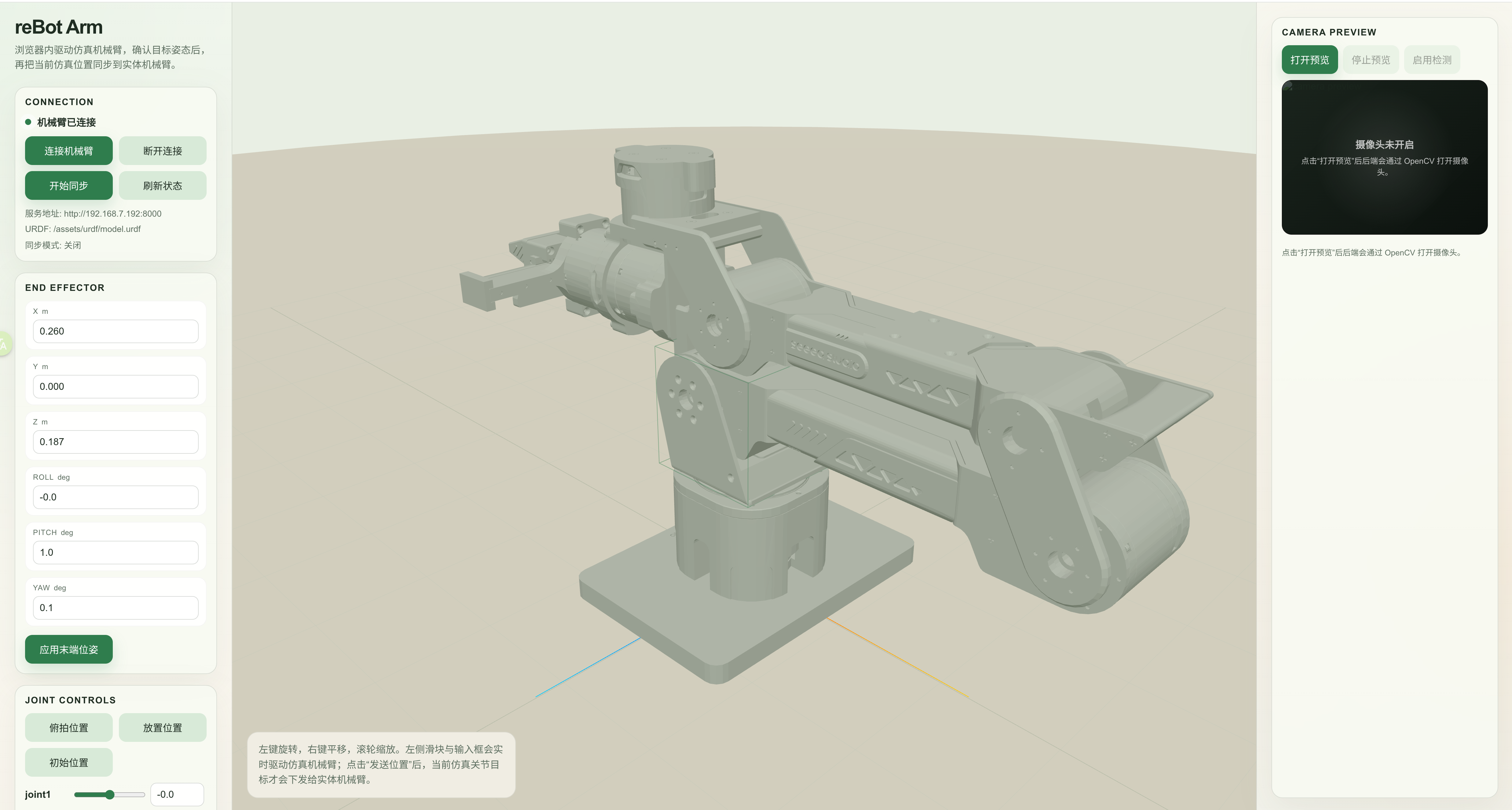
Aplicación

Soporte técnico y debate sobre el producto
Gracias por elegir nuestros productos. Estamos aquí para ofrecerte diferentes tipos de soporte y garantizar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para adaptarnos a distintas preferencias y necesidades.