Primeros pasos con reBot Arm B601-DM

![]()
![]()
![]()
![]()
Brazo robótico de 6 GDL · Soporte multi-motor · Solución de cinemática · Planificación de trayectoria · Totalmente de código abierto
El contenido de esta guía se dirige hacia ti a la velocidad de la luz — ¡mantente atento!
El proyecto reBot Arm ha sido liberado como código abierto en GitHub. Esta guía te llevará a través del inicio rápido del B601-DM, desde el montaje hasta la operación.
Si compraste un kit preensamblado, pasa directamente al video tutorial en el Paso 3 al final de este artículo y síguelo. No es necesario escribir IDs de motor ni calibrar las posiciones cero.
Se ha verificado que el rendimiento de las máquinas virtuales es insuficiente para ejecutar las demostraciones y existen problemas de configuración. Se recomienda usar una máquina física con Ubuntu para controlar el brazo robótico.
Opciones de compra
El reBot Arm B601-DM está disponible en múltiples configuraciones para satisfacer diferentes necesidades de los usuarios.
Comparación de opciones
| Configuración | Cuerpo | Pinza | Motores | Estructura | Enlace de compra |
|---|---|---|---|---|---|
| Kit completo | ✅ | ✅ | ✅ | ✅ | Próximamente |
| Solo pinza | ❌ | ✅ | ❌ | ❌ | Próximamente |
| Solo cuerpo (estructura) | ✅ | ❌ | ❌ | ✅ | Próximamente |
| Solo cuerpo (motores) | ✅ | ❌ | ✅ | ❌ | Próximamente |
Descargo de responsabilidad de seguridad y aviso de riesgos
Sobre la fuente de alimentación
- El brazo robótico no se envía con una fuente de alimentación / no incluye una fuente de alimentación por defecto. Puedes conectar una batería por tu cuenta, o comprar nuestra fuente de alimentación MeanWell de 24V 14.6A de código abierto o en Amazon. No compres fuentes de alimentación de fabricantes sin marca o de canales inseguros. Cualquier riesgo o consecuencia que surja de ello será asumido por el propio usuario.
Si el voltaje de tu hogar es 220V, ajusta el interruptor selector de voltaje en el lateral de la fuente de alimentación a 230V. Si el voltaje de tu hogar es 110V, cámbialo a 115V.
| 220V | 110V |
|---|---|
 |  |

-
Alternativamente, puedes elegir nuestra carcasa de fuente de alimentación MeanWell de 24V 14.6A de código abierto para autoensamblaje. Las instrucciones de texto y la lista de materiales (BOM) están publicadas como código abierto en el repositorio de GitHub (recomendado solo para desarrolladores con experiencia relevante en montaje de fuentes de alimentación).
Video de referencia para el montaje:
Paso 1: Guía de montaje
Antes del montaje:
-
Lee atentamente las siguientes instrucciones para garantizar un proceso de montaje fluido.
- Este kit incluye varios tornillos y piezas con apariencias similares. Verifica las especificaciones y la orientación antes de fijarlos.
- El video fue grabado a principios de abril. Pueden existir pequeñas actualizaciones, pero el montaje sigue siendo el mismo. Toma como referencia las piezas enviadas como versión final.
- Los tornillos enviados tienen fijador de roscas aplicado. Usa herramientas adecuadas o un destornillador eléctrico (recomendado). Ajusta el par a (3–6 kgf·cm) para evitar barrer la rosca. Si se barre, detente inmediatamente y reemplaza o realinea el tornillo. Los tornillos con fijador de roscas barridos son difíciles de retirar y pueden dañar las piezas.
- Garantiza la seguridad durante el montaje. Evita pellizcos o lesiones. Los niños deben estar supervisados.
tipRecordatorio: El D4 * 7 entre el motor 5 y el motor 6 en el video de montaje no necesita instalarse. Es un error en el video. Si compraste la versión DIY del reBot Arm B601-DM, los 7 tornillos D4 * 7 son suficientes para que completes el montaje.
Paso 2: Restablecer ID de los motores
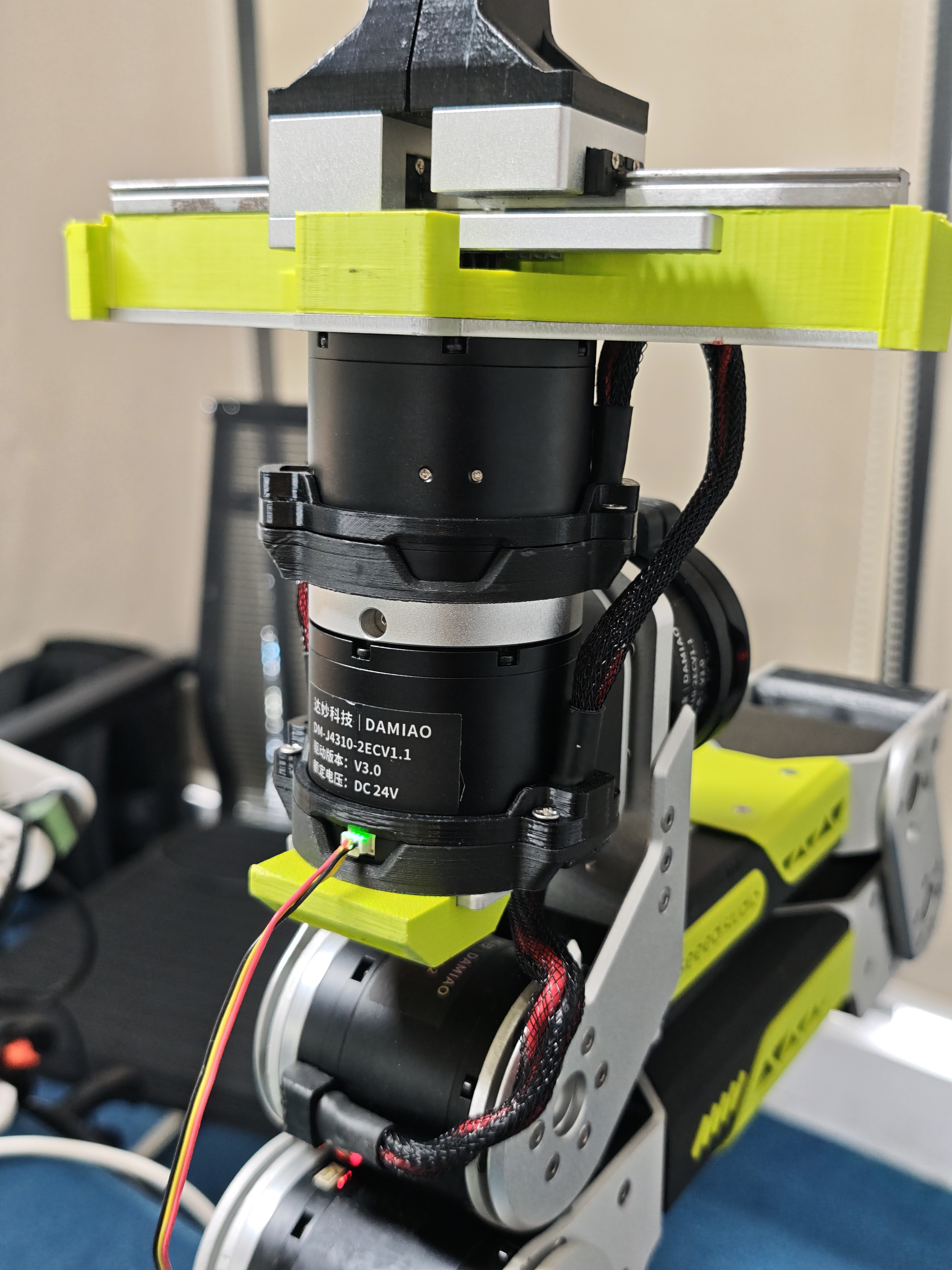
Al montar el brazo robótico, no olvides conectar el mazo de cables entre el Motor 1 y el Motor 2. La posición exacta está resaltada en la imagen de abajo. Antes de cambiar la conexión del cable de 3 pines, asegúrate de que el motor actual esté deshabilitado y la alimentación desconectada para evitar conexiones en caliente u operaciones incorrectas que puedan causar parámetros anómalos en el motor.

AI AGENT
Esta sección está en versión beta. Observa las precauciones de seguridad durante su uso. Si las sugerencias de la IA difieren de esta documentación, sigue esta guía y solicita ayuda a nuestros ingenieros.
Deja que un AI AGENT te ayude en este proceso. Copia la siguiente indicación en tu asistente de IA:
Please follow the workflow in AGENTS.md (https://github.com/Welt-liu/reBot-B601-RS-Skills/blob/main/en/AGENTS.md) to help me initialize the robotic arm.
Antes de restablecer los motores:
Antes de la configuración de parámetros de los motores, ten en cuenta las siguientes preparaciones y normas de seguridad:
- Compra 2 pinzas de sujeción (≥3 pulgadas) y una fuente de alimentación conmutada de 24V 15A con salida XT30 (usa una marca reconocida, no productos de baja calidad).
- Mantén una distancia ≥1 m durante la depuración/operación.
- No conectes/desconectes los motores en caliente; corta la alimentación antes de enchufar/desenchufar la interfaz XT30 2+2.
- No sobrecargues ni excedas la velocidad; revisa el cableado y los elementos de fijación antes de arrancar; evita entornos húmedos, de alta temperatura o con polvo.
- Establece parámetros de programa razonables y un paro de emergencia para evitar pérdida de control.
- Sigue estrictamente estas normas. El vendedor no es responsable de los riesgos/responsabilidades derivados de operaciones ilegales o errores personales.
Lista de preparación
Hardware
- Brazo robótico reBot Arm B601 DM × 1
- Placa adaptadora USB-CAN × 1
- Placa de separación de señal y potencia × 1
- Pinzas de carpintería × 2
- Cable USB-C × 1
- Fuente de alimentación de 24V 15A (salida XT30) × 1
- Cable de alimentación-US \ Cable de alimentación-EU
Requisitos del ordenador
- Ordenador personal con arranque dual (Windows + Ubuntu / macOS)
Software
Escribir ID del motor y probar habilitación
Configura el CAN ID y el Master ID para cada motor de articulación según los parámetros de la siguiente tabla:
| Número de motor | CAN ID | Master ID |
|---|---|---|
| Motor 1 | 0x01 | 0x11 |
| Motor 2 | 0x02 | 0x12 |
| Motor 3 | 0x03 | 0x13 |
| Motor 4 | 0x04 | 0x14 |
| Motor 5 | 0x05 | 0x15 |
| Motor 6 | 0x06 | 0x16 |
| Motor 7 | 0x07 | 0x17 |
El siguiente es un ejemplo de operación utilizando el Motor 1. Asegúrate de que el CAN ID y el Master ID de cada motor de articulación estén configurados correctamente según la tabla anterior.
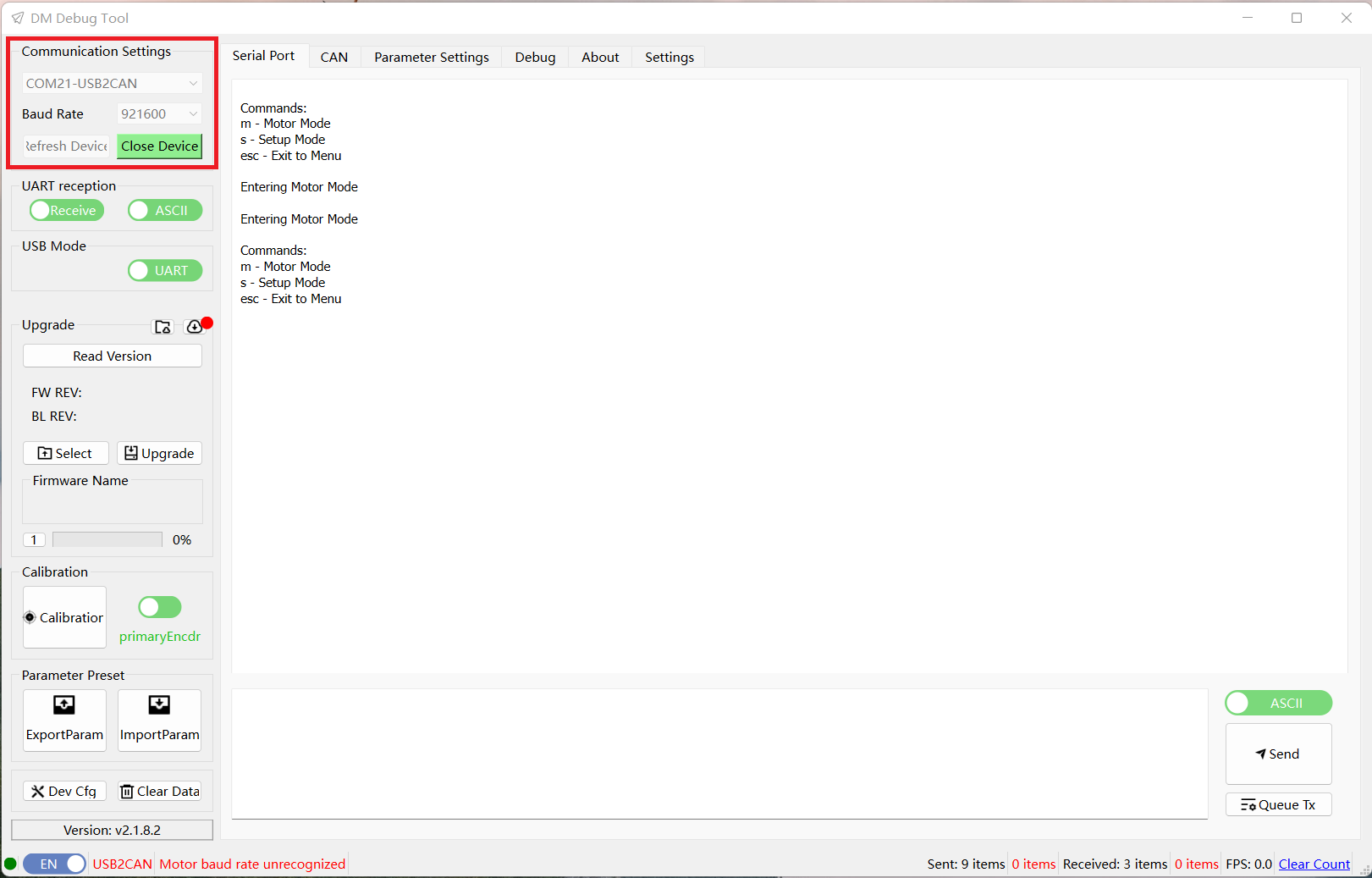
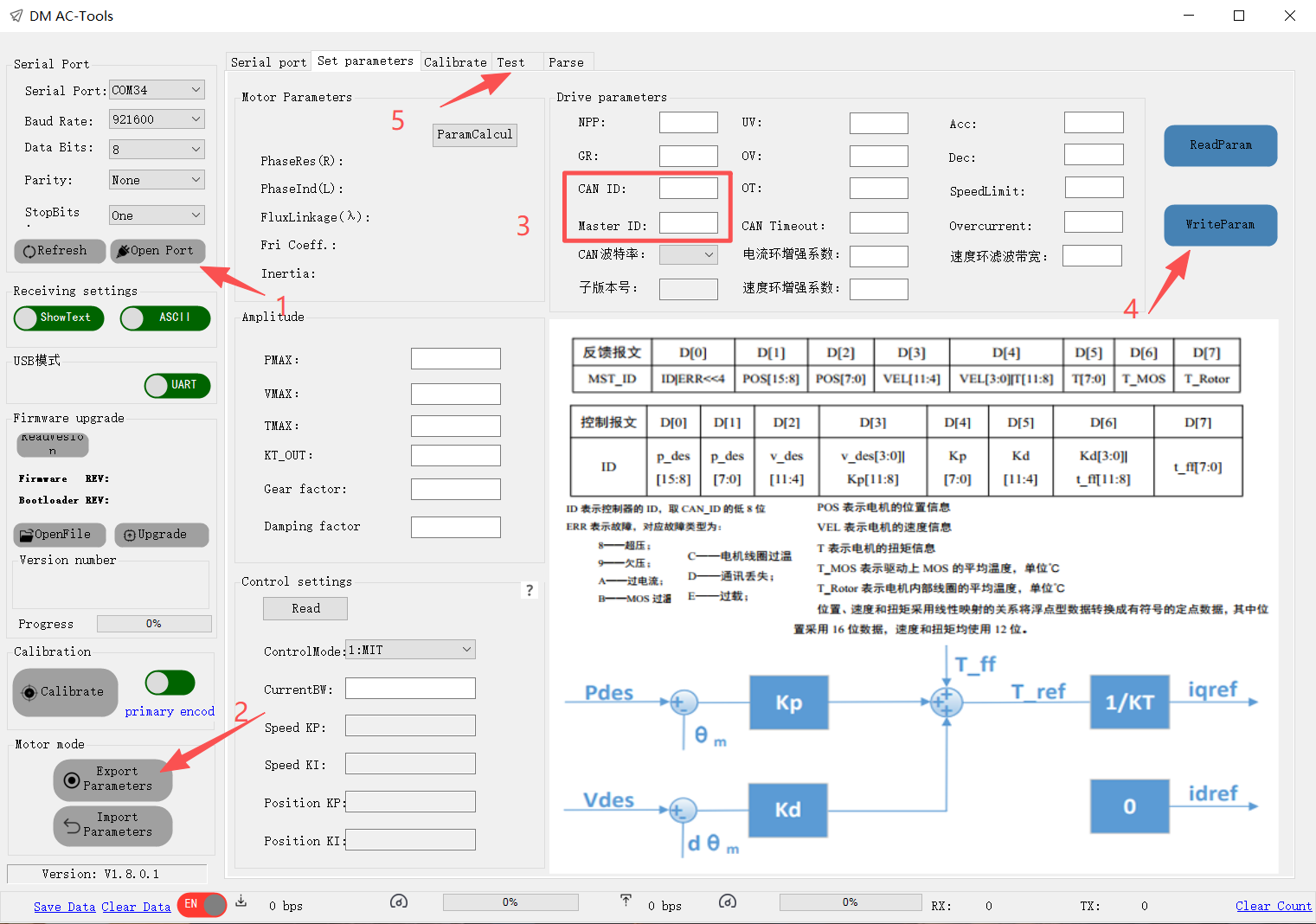
1.Abre el software host DM_Tools, selecciona el puerto USB COM correspondiente y establece la velocidad en baudios a 921600. Una vez conectado correctamente, se imprimirá información en la interfaz Serial.
2.Utiliza el cable de 3 pines para conectar el Motor 1 a la placa adaptadora USB-CAN.
3.Después de la conexión, entra en la interfaz Parameter Settings. Haz clic en Read Parameters para leer los parámetros actuales, luego establece el CAN ID en 0x01 y el Master ID en 0x11.
4.Después de la configuración, haz clic en Write Parameters para guardar los parámetros.
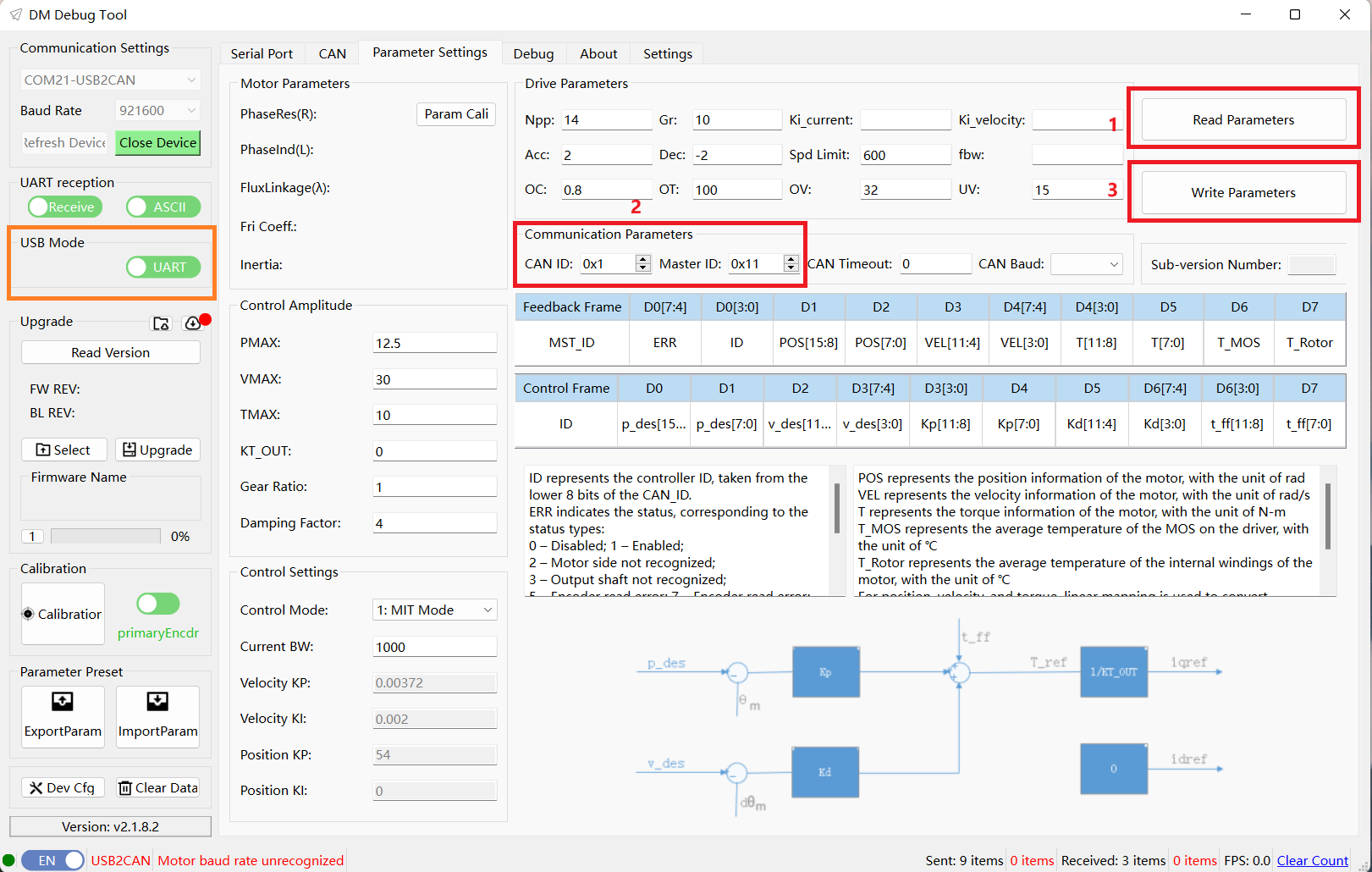
El modo USB en el cuadro naranja de la izquierda representa el método utilizado al leer y escribir parámetros del motor en la página de configuración actual.
5.Navega a la interfaz Debug. Después de asegurarte de que el CAN ID y el Master ID están configurados correctamente, haz clic en Enable. El indicador del motor se volverá verde fijo, lo que indica que el motor está habilitado. La prueba del Motor 1 se ha completado.
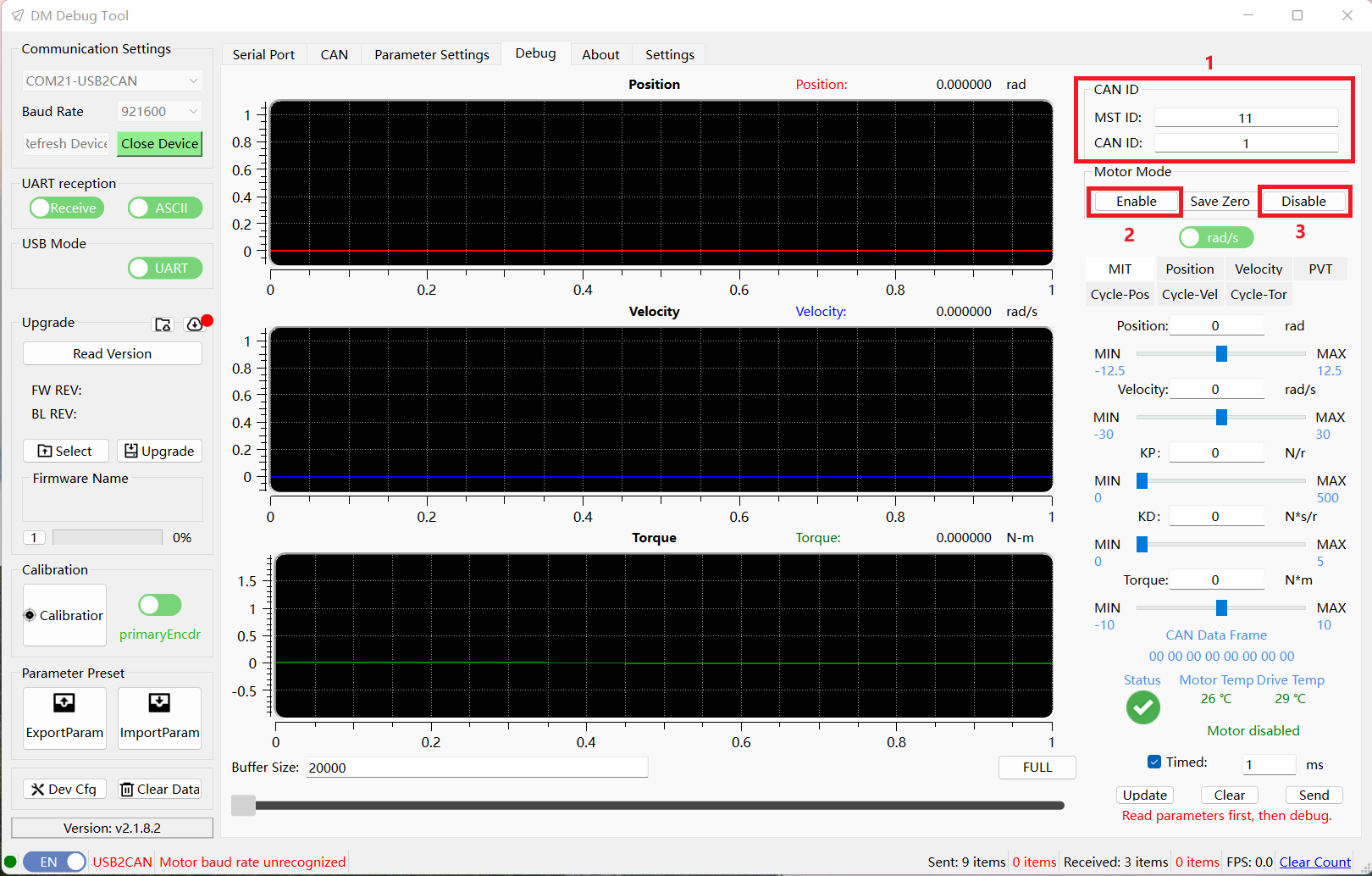
Después de la prueba, recuerda hacer clic en Disable para salir del estado habilitado.
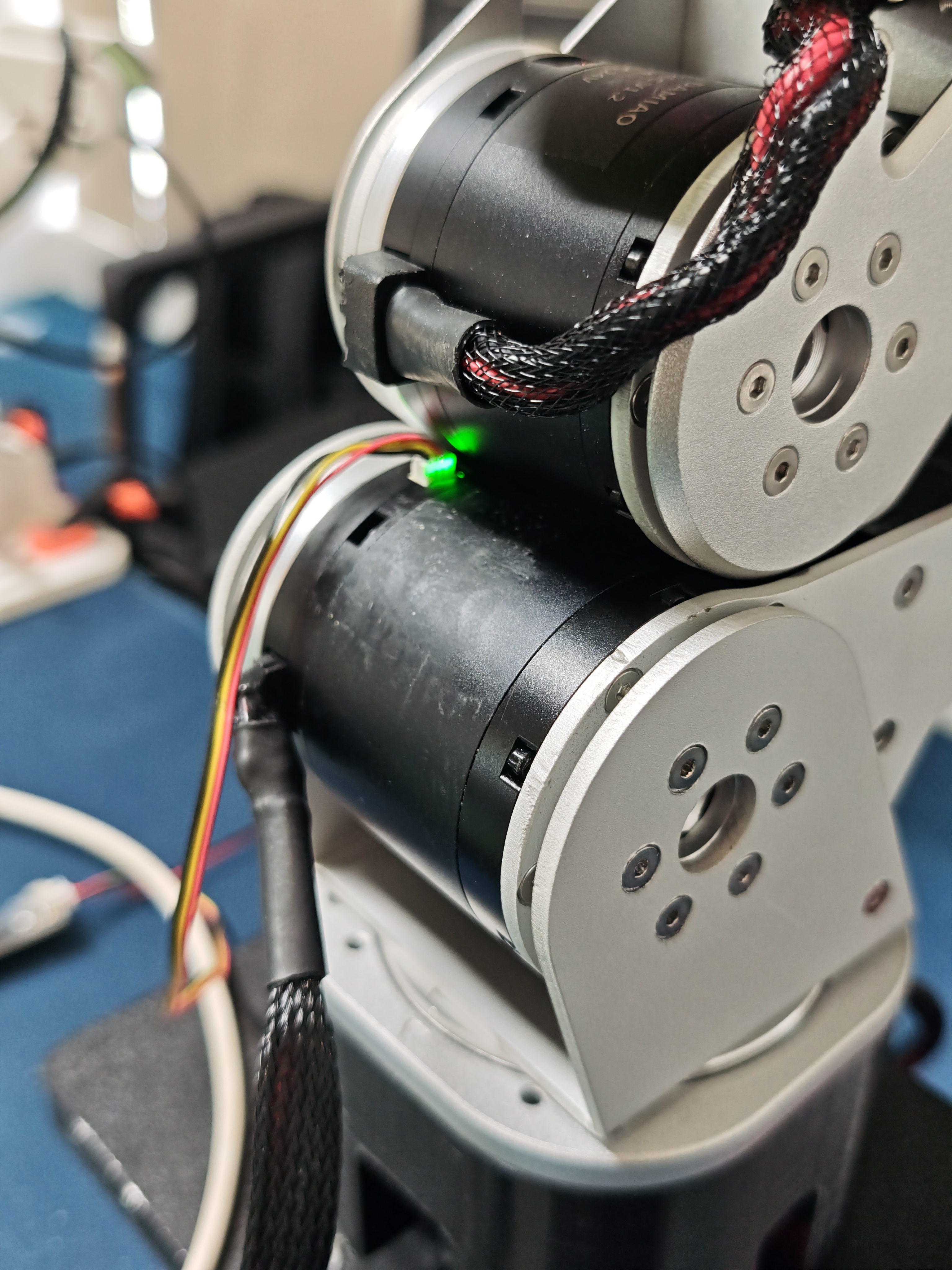
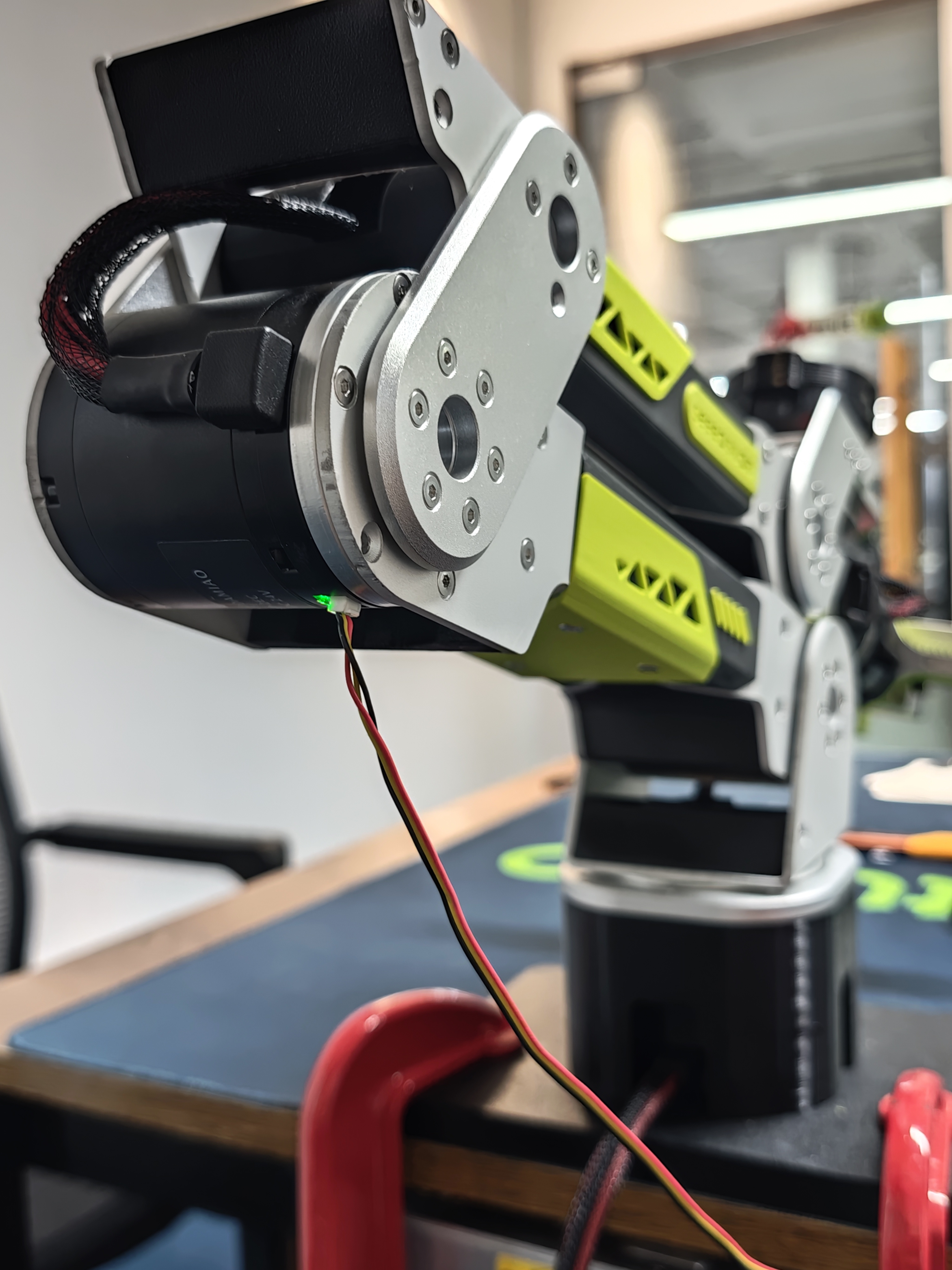
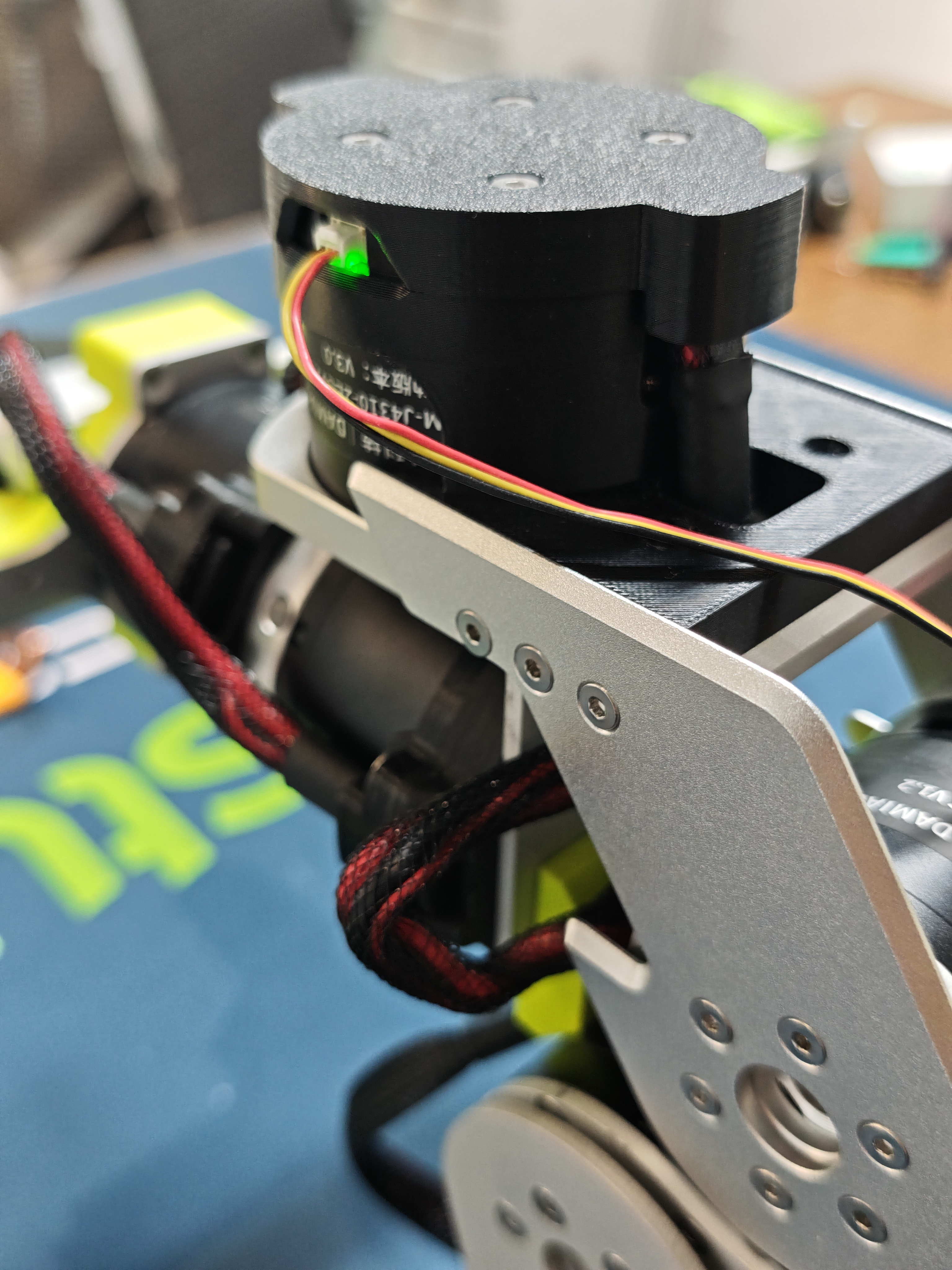
Puntos de conexión del cable de 3 pines y efecto de habilitación para cada motor
| Configuración Motor 1 | Configuración Motor 2 | Configuración Motor 3 | Configuración Motor 4 | Configuración Motor 5 | Configuración Motor 6 | Configuración Motor 7 |
|---|---|---|---|---|---|---|
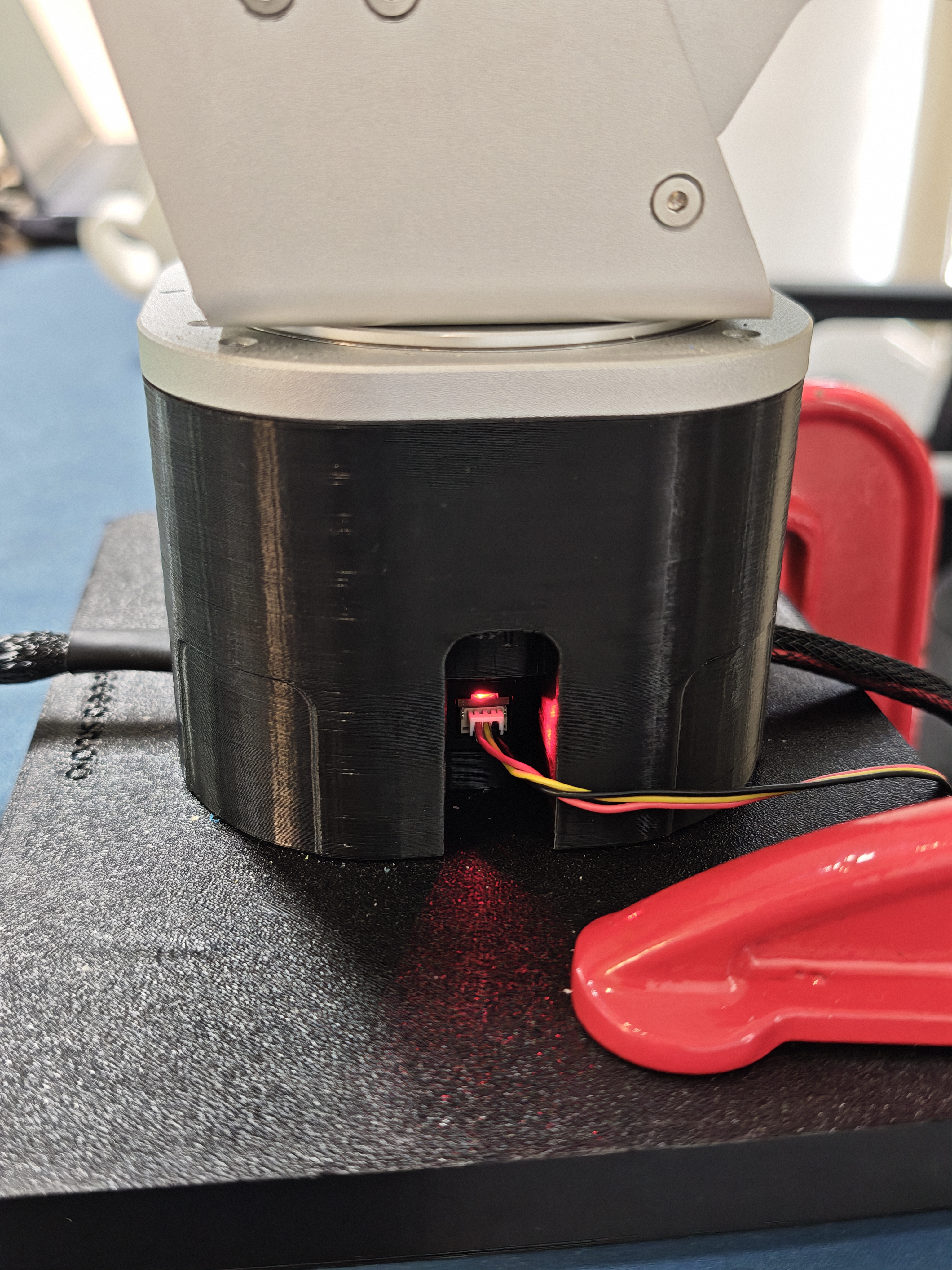 | 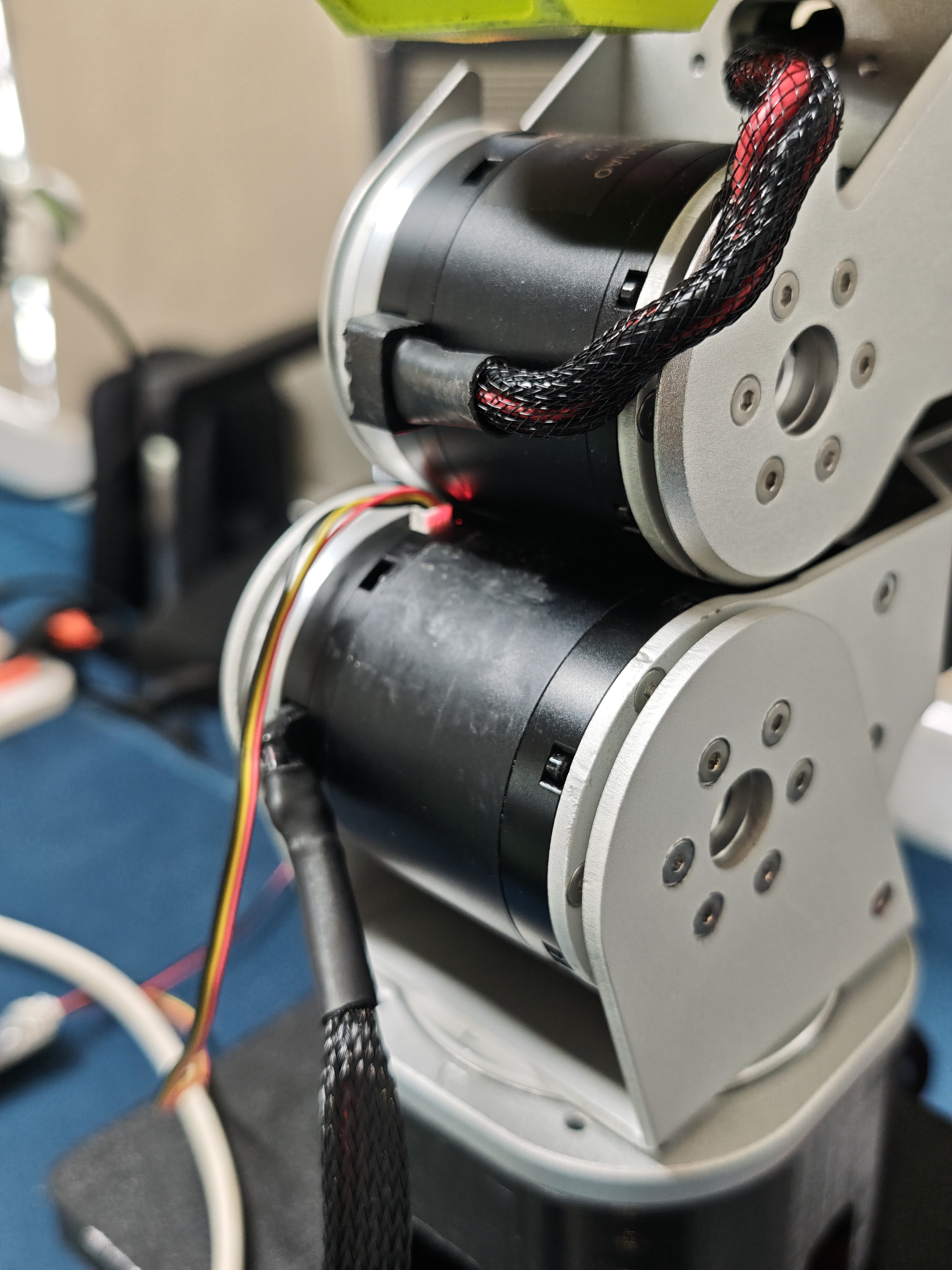 |  | 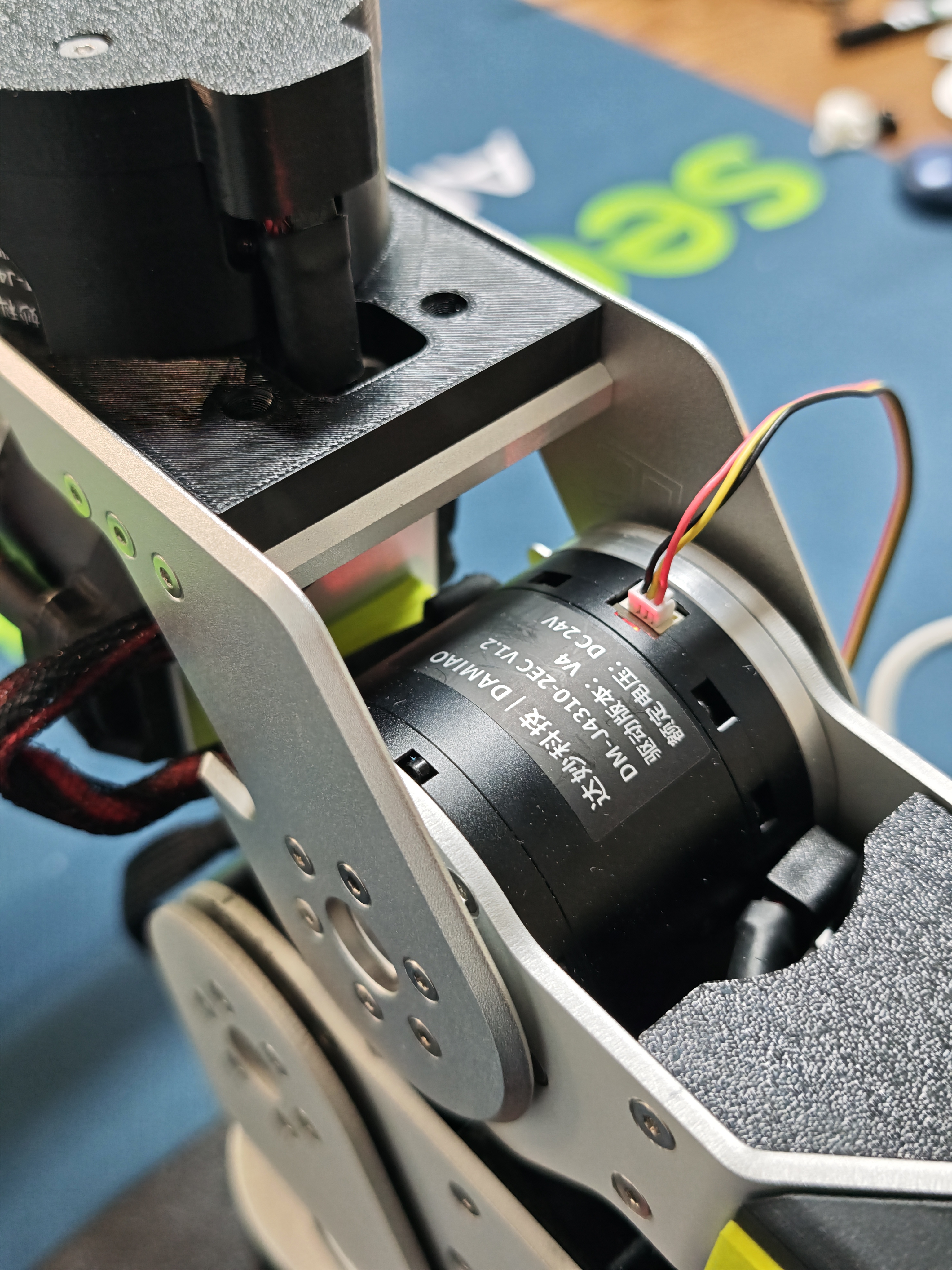 | 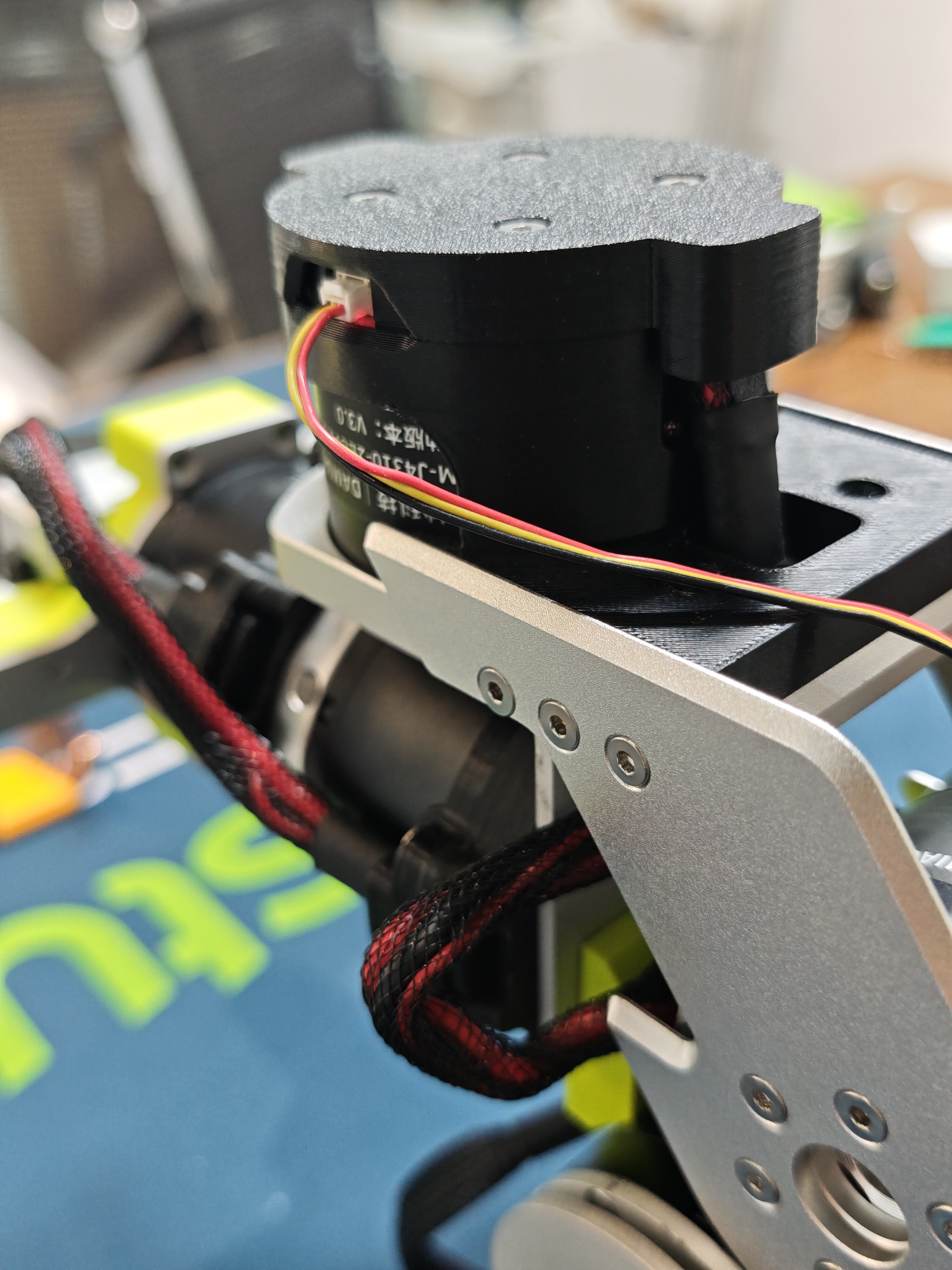 |  |  |
| Motor 1 habilitado | Motor 2 habilitado | Motor 3 habilitado | Motor 4 habilitado | Motor 5 habilitado | Motor 6 habilitado | Motor 7 habilitado |
|---|---|---|---|---|---|---|
 |  |  |  |  |  |  |
Paso 3: Calibrar el reBot Arm y empezar
Confiamos en que has completado el montaje del brazo robótico, la inicialización del punto cero, la configuración de los ID de los motores y otros pasos de configuración siguiendo el vídeo. Ahora estás listo para explorar oficialmente la serie de tutoriales y herramientas que hemos publicado.
Consulta el vídeo y el tutorial en texto. Antes de controlar el brazo robótico, debes restablecer de nuevo el punto cero.
-
Explora nuestra plataforma MotorBridge, una solución todo en uno que admite una lista en expansión de motores, incluidos Damiao, Robstride, Hightorque, Myactuator, Hexfellow y más. También es compatible con brazos robóticos actualizados continuamente como reBot. Diseñada para principiantes, también ofrecemos un SDK de Python que implementa la misma funcionalidad para desarrolladores.
-
Experimenta nuevas funciones y detalles de MotorBridge para el brazo robótico reBot, incluyendo ajuste del punto cero con un clic, escritura de parámetros, control del motor mediante arrastrar y soltar en la interfaz de usuario y una interfaz integrada de visualización del modelo.
-
Esta herramienta es totalmente compatible con los sistemas operativos Windows, Ubuntu y Mac.
Paso 1: Instalar Miniforge (en Windows\Ubuntu\macOS\Jetson\Pi)
Instala Miniforge y crea un entorno virtual para evitar interferencias de otros paquetes de entorno.
Ubuntu\Jetson\Pi:
wget "https://github.com/conda-forge/miniforge/releases/latest/download/Miniforge3-$(uname)-$(uname -m).sh"
bash Miniforge3-$(uname)-$(uname -m).sh
o macOS:
curl -L -O "https://github.com/conda-forge/miniforge/releases/latest/download/Miniforge3-MacOSX-$(uname -m).sh"
bash Miniforge3-MacOSX-$(uname -m).sh
o Windows:
Abre la página de lanzamientos de Miniforge en tu navegador, busca el último Miniforge3-Windows-x86_64.exe y descárgalo:
https://github.com/conda-forge/miniforge/releases
Paso 2: Configuración del entorno
Crea un entorno virtual con Python 3.12:
conda create -y -n rebot python=3.12
Luego activa tu entorno virtual; tienes que hacer esto cada vez que abras una terminal para usar rebot:
conda activate rebot
Paso 3: Instalar motorbridge
Nota para usuarios de macOS:
Si experimentas una baja tasa de fotogramas durante la teleoperación en macOS, puede deberse a un controlador WCH CH34x desactualizado. Para macOS 10.14 y posteriores, el sistema incluye un controlador integrado AppleUSBCHC0M. Puedes desinstalar el controlador antiguo y cambiar al controlador integrado de macOS, lo que debería mejorar eficazmente la tasa de fotogramas.
Después de activar el entorno virtual de reBot, ejecuta el siguiente comando para instalar motorbridge:
pip install motorbridge
Paso 4: Conectar el rebot
Después de conectar el brazo robótico a tu ordenador mediante un cable USB y encender su fuente de alimentación, debes configurar permisos de acceso 666 para el puerto serie. (Los sistemas Windows no requieren configuración de permisos; puedes omitir este paso).
sudo chmod 666 /dev/ttyACM*
Paso 5: Abrir el motorbridge
Abre https://motorbridge.github.io/motorbridge-studio/ en tu navegador, luego haz clic en la ayuda. Copia el comando adecuado para tu sistema y placa controladora, comprueba la IP y el puerto y, a continuación, pulsa Intro en la terminal.
Por ejemplo, en Windows:
motorbridge-gateway -- --bind 127.0.0.1:9002 --vendor damiao --transport dm-serial --serial-port COM3 --serial-baud 921600 --model 4340P --motor-id 0x01 --feedback-id 0x11 --dt-ms 20

Preguntas frecuentes (FAQ)
1. Se produce un ruido anómalo fuerte inmediatamente después del arranque del motor
- Este problema suele ocurrir cuando la calibración de parámetros se activa accidentalmente durante la configuración del ID, lo que sobrescribe los parámetros preestablecidos de fábrica, como la inercia del motor. Utiliza DM_Tools_v.1.8.0.1.exe (solo para Windows) disponible en: https://files.seeedstudio.com/wiki/robotics/projects/rebot_arm/DM_Tools_v1.8.0.1.exe Exporta los parámetros completos de un motor intacto del mismo modelo mediante el software host, importa estos parámetros en la unidad defectuosa, actualiza su correspondiente CAN ID, guarda los parámetros escritos y luego procede con la calibración del punto cero.
Parámetros predeterminados DM4310 Parámetros predeterminados DM4340P
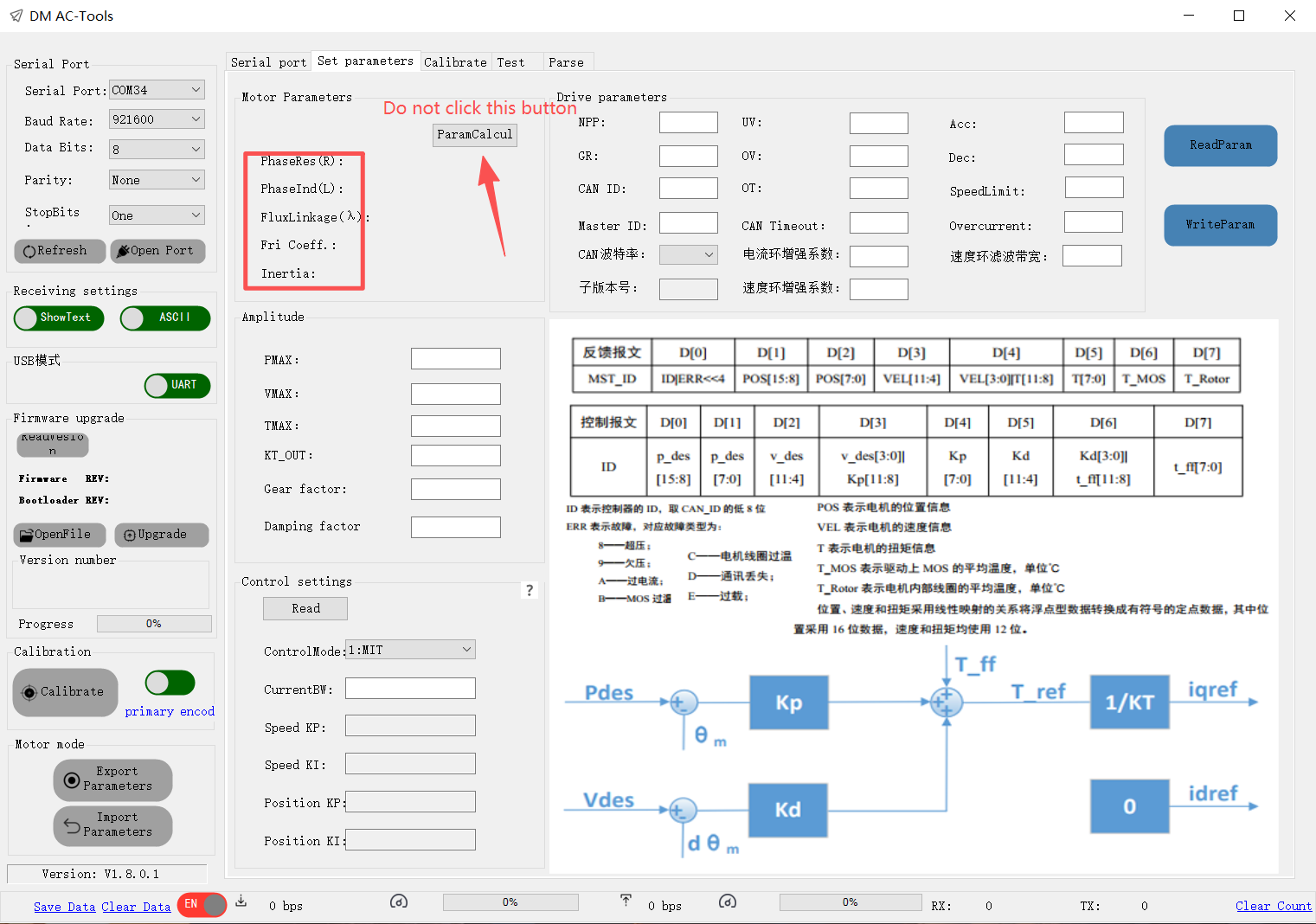
2. Todos los motores comparten los mismos CAN ID
- Al realizar la calibración del punto cero mediante DM_Tools_v.1.8.0.1.exe (solo para Windows), evita hacer clic en los botones Read o Set junto al campo CAN ID. La interfaz de depuración se comunica a través del bus CAN; al hacer clic en Set se unificará el CAN ID de todos los motores conectados al CANBUS.