Configurar reComputer Industrial R22xx
Descripción general
Aprende cómo configurar y probar los componentes de hardware en la serie reComputer Industrial R22xx después de instalar los dispositivos. Este wiki cubre el mapeo de GPIO, prueba del LED de USUARIO, comunicación SPI, escaneo de Wi‑Fi y Bluetooth, LoRa®, 4G, 5G, Zigbee sobre Mini-PCIe, RS485, RS232, CAN, pruebas de DI/DO, UPS para apagado seguro y más.

Consultar asignaciones y desplazamientos de GPIO
Para consultar las asignaciones y desplazamientos de GPIO, sigue estos pasos:
- Copia y pega el siguiente comando para consultar las asignaciones de GPIO:
cat /sys/kernel/debug/gpio
Este comando mostrará las asignaciones y desplazamientos de GPIO, proporcionando información esencial para depurar o configurar los pines GPIO.
Prueba del LED de USUARIO
Proporcionamos LED en tres colores: rojo, azul y verde para que los usuarios los utilicen. Puedes entrar en el directorio /sys/class/leds/ para ver:
1. Navega al directorio de LED
cd /sys/class/leds/
ls

Utiliza el siguiente comando para encender el LED del color correspondiente.
sudo su
echo 1 > /sys/class/leds/led-red//brightness
echo 1 > /sys/class/leds/led-blue/brightness
echo 1 > /sys/class/leds/led-green/brightness
Esto encenderá el LED correspondiente.
3. Apagar los LED (opcional)
Para apagar un LED específico, utiliza:
sudo su
echo 0 > /sys/class/leds/led-red/brightness
echo 0 > /sys/class/leds/led-blue/brightness
echo 0 > /sys/class/leds/led-green/brightness
Prueba de la comunicación SPI
Para probar la comunicación SPI cortocircuitando los pines MISO y MOSI del módulo TPM, sigue estos pasos:
- Clona el repositorio spidev-test:
# Don't forget to connect to network before running command
git clone https://github.com/rm-hull/spidev-test.git
- Entra en el directorio spidev-test:
cd spidev-test
- Compila el archivo spidev_test.c:
gcc spidev_test.c -o spidev_test
- Ejecuta el programa spidev_test con el siguiente comando:
./spidev_test -D /dev/spidev10.0 -v -p hello
Este comando prueba la comunicación SPI en el dispositivo SPI especificado (/dev/spidev10.0) con salida detallada (-v) y envía el mensaje "hello" (-p hello). Al cortocircuitar los pines MISO y MOSI del módulo TPM, estás creando efectivamente un escenario de bucle de retorno, donde los datos enviados por MOSI se reciben en MISO. Esta configuración te permite probar la comunicación SPI sin un dispositivo real conectado.
Escaneo de Wi‑Fi
Para listar las redes Wi‑Fi disponibles y sus detalles, ejecuta:
sudo iwlist wlan0 scan
- Este comando escanea todas las redes Wi‑Fi cercanas y muestra sus SSID, intensidad de señal y tipo de cifrado.
Escaneo de Bluetooth
Para escanear dispositivos Bluetooth, sigue estos pasos:
Abre la interfaz de control de Bluetooth:
sudo bluetoothctl
Este comando abrirá la interfaz de control de Bluetooth. Desde ahí, puedes ejecutar comandos adicionales para escanear dispositivos Bluetooth cercanos.
Habilita el escaneo:
scan on
Este comando iniciará el escaneo de dispositivos Bluetooth cercanos. Luego puedes usar otros comandos dentro de la interfaz de bluetoothctl para interactuar con dispositivos Bluetooth, como emparejarlos o conectarte a ellos.
LoRa® sobre Mini-PCIe
Configuración LoRa® SPI
Después de instalar el LoRa® SPI en la ranura Mini-PCIe 2, puedes configurar LoRa® SPI siguiendo estos pasos:
- Clona el repositorio SX1302_HAL:
cd ~/
git clone https://github.com/Lora-net/sx1302_hal
- Navega al directorio clonado:
cd sx1302_hal
- Modifica el archivo de configuración:
Abre el archivo de configuración del dispositivo I2C:
sudo nano ./libloragw/inc/loragw_i2c.h
Cambia esta línea:
#define I2C_DEVICE "/dev/i2c-1"
A:
#define I2C_DEVICE "/dev/i2c-2"
Cambia #define I2C_DEVICE "/dev/i2c-1" a #define I2C_DEVICE "/dev/i2c-2". Pulsa ctrl+x para salir, pulsa y para guardar los cambios y luego pulsa Enter para volver a la página de la línea de comandos.
- 4.Agrega el archivo packet_forwarder/reset_lgw.sh:
sudo nano packet_forwarder/reset_lgw.sh
Agrega el código de ejecución:
SX1302_RESET_PIN=632 # SX1302 reset
SX1302_POWER_EN_PIN=633 # SX1302 power enable
SX1261_RESET_PIN=634 # SX1261 reset (LBT / Spectral Scan)
# AD5338R_RESET_PIN=13 # AD5338R reset (full-duplex CN490 reference design)
El firmware admite de forma nativa el modelo SPI WM1302-SPI-US915-M. Si deseas utilizar otros modelos, puedes consultar la definición del RESET_PIN correspondiente y modificar el RESET_PIN haciendo referencia a los siguientes comandos.
cat /sys/kernel/debug/gpio
Pulsa ctrl+x para salir, pulsa y para guardar los cambios y luego pulsa Enter para volver a la página de la línea de comandos.
- Modifica el código de configuración:
cp ./tools/reset_lgw.sh ./packet_forwarder
- Comenta las líneas 18, 29, 35, 42, 53 y 54 respectivamente:
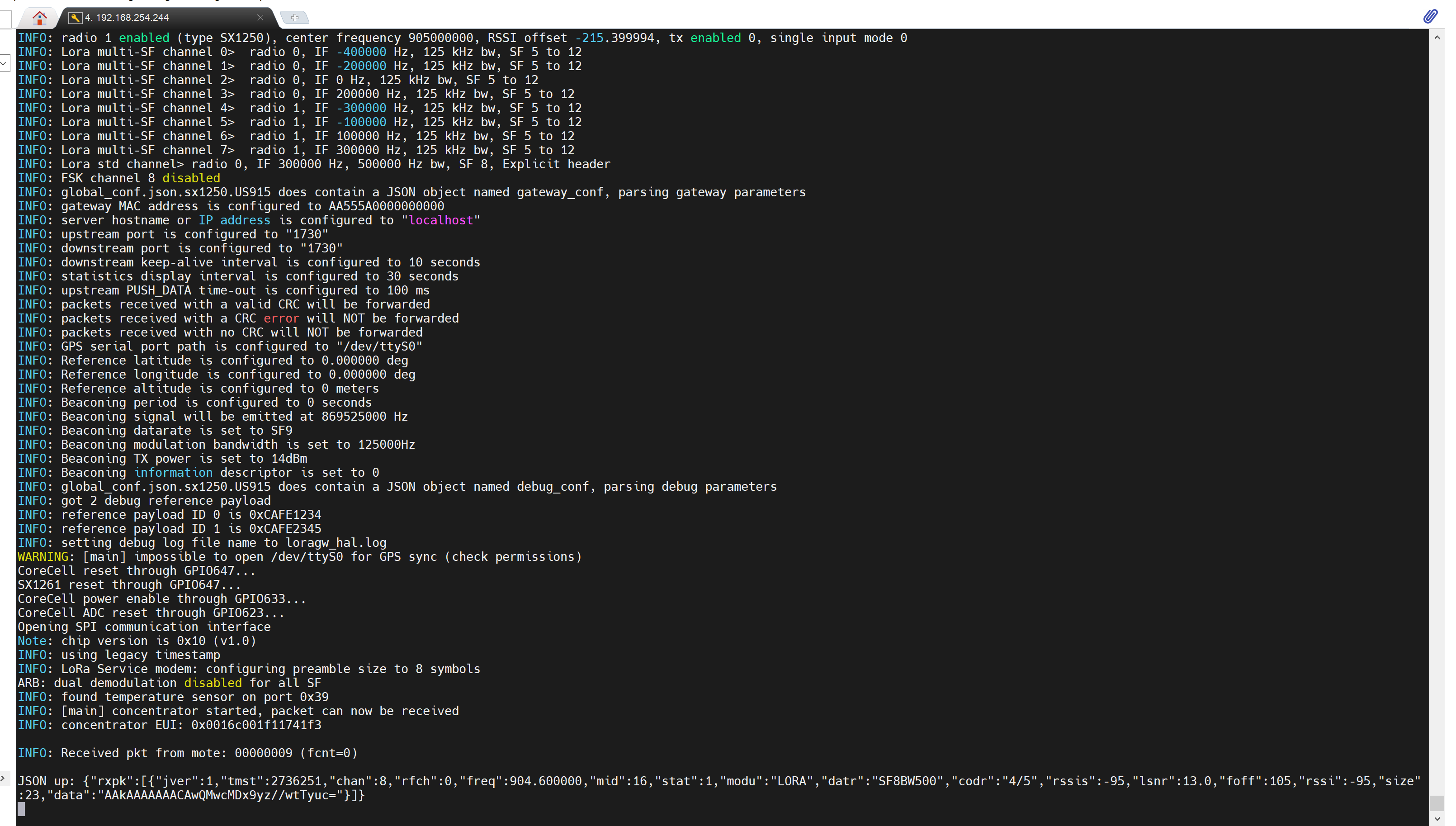
nano ./packet_forwarder/global_conf.json.sx1250.US915
Cambia "com_path": "/dev/spidev0.0" por "com_path": "/dev/spidev2.0".
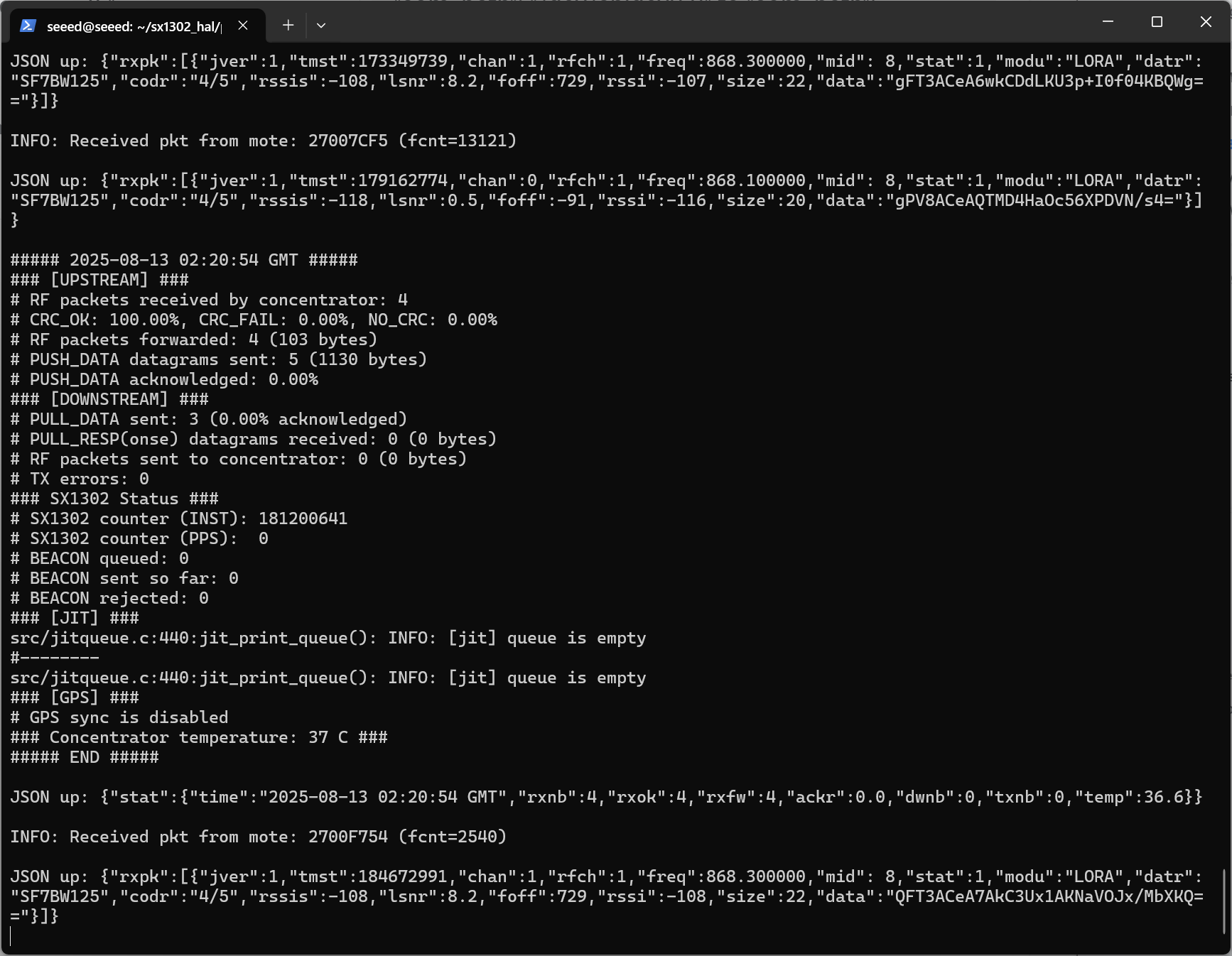
cd ./packet_forwarder
sudo ./lora_pkt_fwd -c global_conf.json.sx1250.US915
Configuración LoRa® USB
Para LoRa® USB, los comandos anteriores siguen siendo los mismos que para LoRa® SPI. Sin embargo, el comando final debe cambiarse a:
cho 632 > /sys/class/gpio/export
echo "out" > /sys/class/gpio/gpio632/direction
echo "1" > /sys/class/gpio/gpio632/value
sudo ./lora_pkt_fwd -c global_conf.json.sx1250.EU868.USB
Este comando especifica el archivo de configuración que se utilizará para LoRa® USB.
Red celular 5G sobre M.2 B-KEY
Para interactuar con un módulo 5G/4G usando comandos AT a través de minicom, sigue estos pasos:
- Crea un nuevo archivo power_5g.sh:
nano power_5g.sh
Ábrelo con sudo nano e introduce el siguiente comando, luego pulsa ctrl+x para guardar y salir.
#!/bin/bash
RESET_PIN=655
POWER_PIN=660
if [ ! -d "/sys/class/gpio/gpio$RESET_PIN" ]; then
echo $RESET_PIN > /sys/class/gpio/export
fi
if [ ! -d "/sys/class/gpio/gpio$POWER_PIN" ]; then
echo $POWER_PIN > /sys/class/gpio/export
fi
echo "out" > /sys/class/gpio/gpio$RESET_PIN/direction
echo "out" > /sys/class/gpio/gpio$POWER_PIN/direction
echo 1 > /sys/class/gpio/gpio$RESET_PIN/value
echo 1 > /sys/class/gpio/gpio$POWER_PIN/value
echo "Start to reboot 5g module"
echo 0 > /sys/class/gpio/gpio$RESET_PIN/value
sleep 0.05
echo 0 > /sys/class/gpio/gpio$POWER_PIN/value
echo "5g module reboot completed"
- Ejecuta el archivo:
sudo ./power_5g.sh
Después de 10‑15 segundos (el módulo tarda un tiempo en encenderse y enumerar el USB), comprueba si aparece el nodo de dispositivo:
ls /dev/ttyUSB*
Salida /dev/ttyUSB0, etc.:

Abre minicom con el puerto serie y la velocidad en baudios adecuados:
sudo apt update
sudo apt install minicom
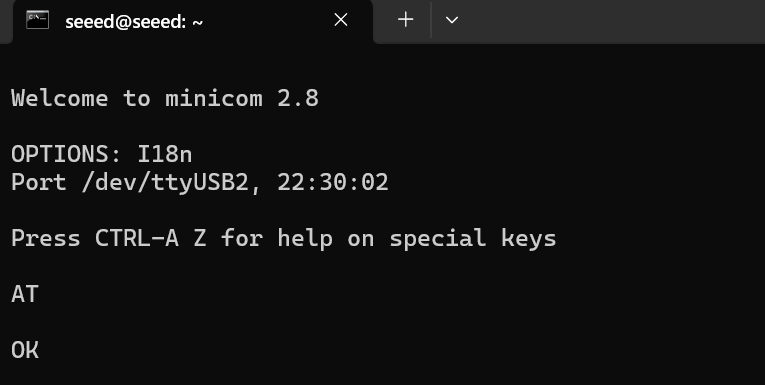
sudo minicom -D /dev/ttyUSB2 -b 115200
Este comando abre minicom con el puerto serie especificado (/dev/ttyUSB2) a una velocidad en baudios de 115200.
- Una vez que minicom esté abierto, puedes empezar a enviar comandos AT al módulo 4G. Por ejemplo:
AT
Este comando comprueba si el módulo responde. Deberías recibir una respuesta "OK" si el módulo funciona correctamente.
- Para marcar un número de teléfono usando el módulo 4G, puedes usar el comando ATD seguido del número de teléfono:
ATD<phone_number>;
Sustituye phone_number por el número de teléfono al que deseas llamar. Asegúrate de incluir un punto y coma ; al final del comando para indicar el final del número de teléfono.
Red celular 4G sobre Mini-PCIe
Crea un nuevo archivo power_4g.sh:
sudo nano power_4g.sh
Ábrelo con sudo nano e introduce el siguiente comando, luego pulsa ctrl+x para guardar y salir.
# SIM_MUX_SEL
echo 655 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio655/direction
echo 0 > /sys/class/gpio/gpio655/value
echo 660 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio660/direction
echo 1 > /sys/class/gpio/gpio660/value
Ejecuta el archivo:
sudo ./power_4g.sh
Entra en minicom para enviar comandos:
sudo apt install minicom -y
sudo minicom -D /dev/ttyUSB2 -b 115200
Pulsa en secuencia Ctrl+A, Z, E. Primero envía AT para probar si está conectado. Si aparece OK, la conexión se ha realizado correctamente.
Después de ejecutar el siguiente comando, el módulo se reiniciará automáticamente. Si no sales de minicom, puedes ver la información de configuración correspondiente. Acceso a Internet por marcación ECM:
AT+QCFG="usbnet",1
Hasta que la última línea muestre OK, será exitoso.
Nota El dispositivo necesita esperar un rato y luego podrás ver la dirección IP de usb0 en ifconfig.
Probar el estado de la red y la comunicación:
# Check network status
ifconfig
# Test communication
ping www.baidu.com -I usb0
Zigbee sobre Mini-PCIe
Para probar la comunicación Zigbee entre dos módulos Zigbee, sigue estos pasos:
- Comprobar los puertos serie disponibles
Utiliza el siguiente comando para comprobar los puertos serie disponibles:
cat /dev/ttyUSB*
Instalar una herramienta de comunicación serie
- Instalar la herramienta de comunicación serie:
sudo apt-get install cutecom
- Abrir el puerto serie para el coordinador (primer módulo Zigbee):
- Abre la herramienta cutecom y configúrala para el primer puerto serie:
- Velocidad en baudios: 115200
- Marca la opción "Hex output" en la parte inferior de la interfaz.
- Sigue estos pasos para configurar el primer módulo Zigbee:
- Establecer como coordinador: Envía el comando ‘55 04 00 05 00 05’, espera la respuesta ‘55 04 00 05 00 05’.
- Reiniciar dispositivo: Pulsa el botón de reinicio o envía el comando ‘55 07 00 04 00 FF FF 00 04’.
- Formación de red: Envía el comando ‘55 03 00 02 02’.
- Abrir el puerto serie para el router (segundo módulo Zigbee): Abre otra instancia de cutecom y configúrala para el segundo puerto serie con los mismos ajustes que antes. Sigue estos pasos para configurar el segundo módulo Zigbee:
- Establecer como router: Envía el comando ‘55 04 00 05 01 04’, espera la respuesta ‘55 04 00 05 00 05’.
- Reiniciar dispositivo: Pulsa el botón de reinicio o envía el comando ‘55 07 00 04 00 FF FF 00 04’.
- Formación de red: Envía el comando ‘55 03 00 02 02’.
- Comprobar el estado del dispositivo: Envía el comando ‘55 03 00 00 00’ para comprobar el estado del dispositivo. Espera una respuesta similar a ‘55 2a 00 00 00 01 XX XX XX XX’, donde ‘XX’ representa la información del dispositivo.
- Entrar en modo transparente: Si la formación de red es correcta, entra en modo transparente enviando el comando 55 07 00 11 00 03 00 01 13. Ambos módulos deben estar en modo transparente para la comunicación directa. Para salir del modo transparente, envía "+++".
- Notas adicionales:
- Si la configuración del router falla, es posible que el dispositivo ya sea un coordinador. Abandona la red usando el comando '55 07 00 04 02 xx xx xx'.
- Prueba la potencia de transmisión usando los comandos '55 04 0D 00 00 0D' (consulta) y '55 04 0D 01 XX XX' (ajuste). Asegúrate de reemplazar /dev/ttyUSB con el puerto serie correcto para cada módulo Zigbee. Sigue estos pasos cuidadosamente para probar con éxito la comunicación Zigbee entre los dos módulos.
Prueba de RS485
El reComputer Industrial R21xx incluye 2x puertos RS485. A continuación se muestran sus correspondientes puertos COM y archivos de dispositivo:
| Número de puertos RS485 | Puerto COM | Etiqueta serigrafiada | Archivo de dispositivo |
|---|---|---|---|
| RS485-2 | COM2 | A2/B2/GND3 | /dev/ttyACM1 |
| RS485-3 | COM3 | A3/B3/GND4 | /dev/ttyACM2 |
Para probar la función RS485, puedes seguir los pasos a continuación (tomando RS485_1 y RS485_2 como ejemplos):
- Conecta los terminales A y B de RS485_1 y RS485_2.
- Abre minicom en dos ventanas de terminal respectivamente:
sudo minicom -D /dev/ttyACM1
sudo minicom -D /dev/ttyACM2
Si hay una placa de expansión, el número debe desplazarse una posición hacia atrás, por ejemplo /dev/ttyAcM2, /dev/ttyAcM3.
- Las siguientes operaciones deben realizarse en ambos ACM abiertos:
-
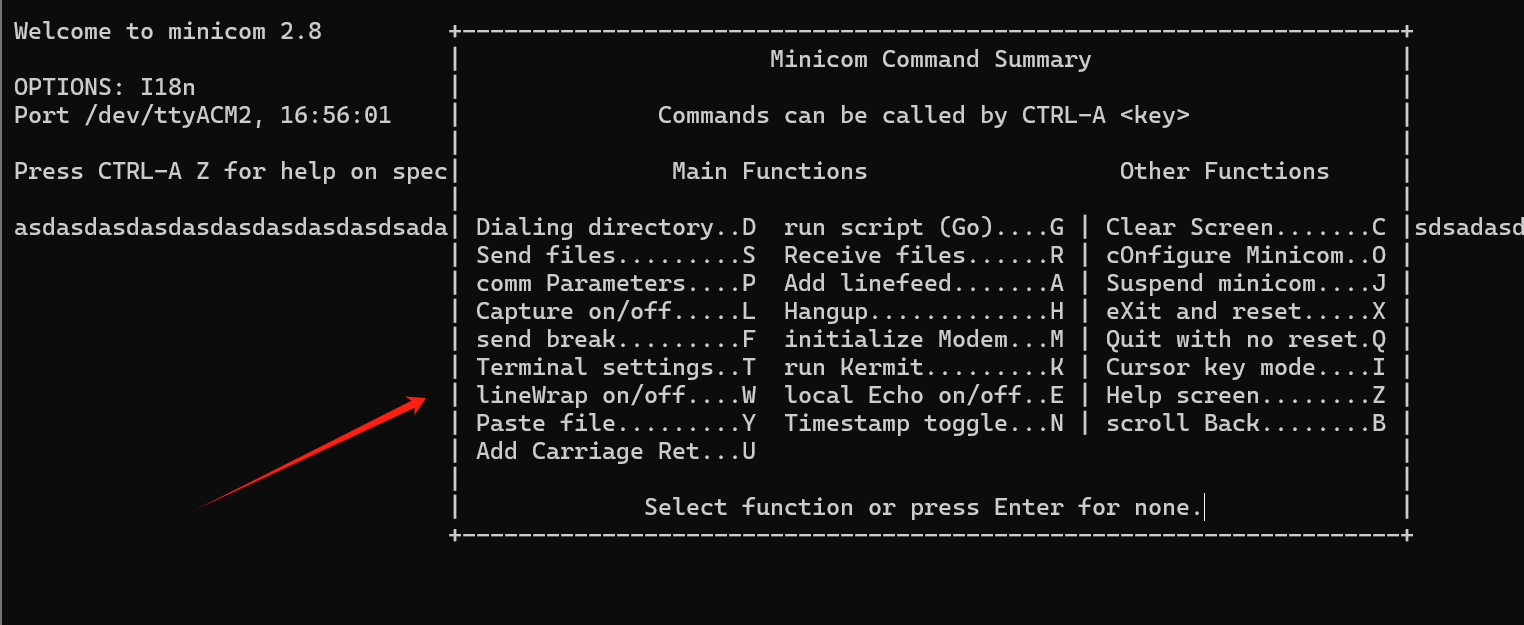
Pulsa Ctrl+A, luego pulsa Z, y aparecerá la interfaz de Resumen de Comandos de Minicom:
-
Pulsa O de nuevo para abrir la configuración, selecciona Serial port setup y pulsa Enter; abre todas las interfaces relacionadas con RS485, pulsa H/I/J/K/L en secuencia para activarlas;
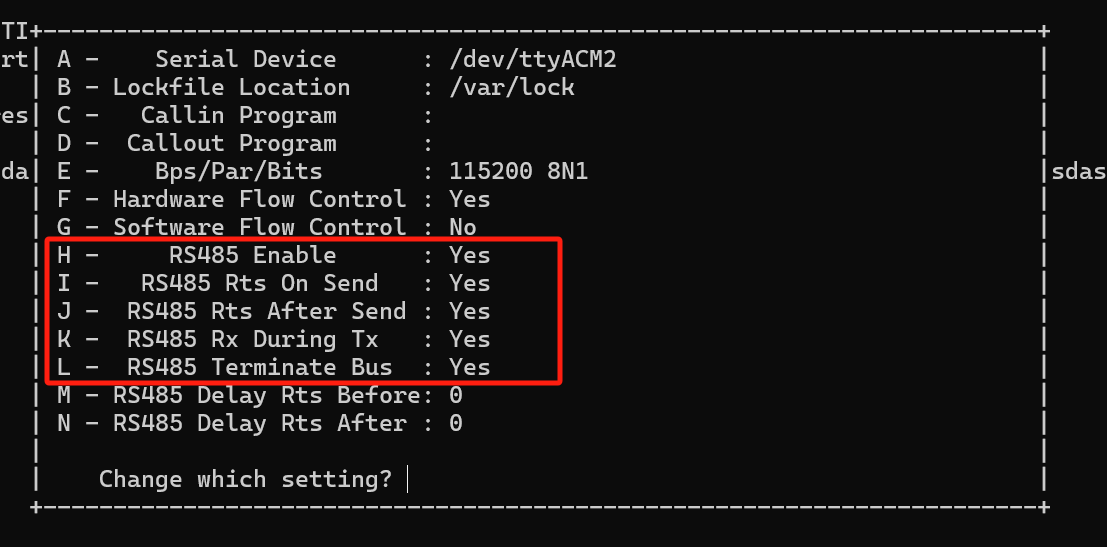
-
Después de que todos muestren "YES", pulsa Enter para volver y luego selecciona Exit para salir.
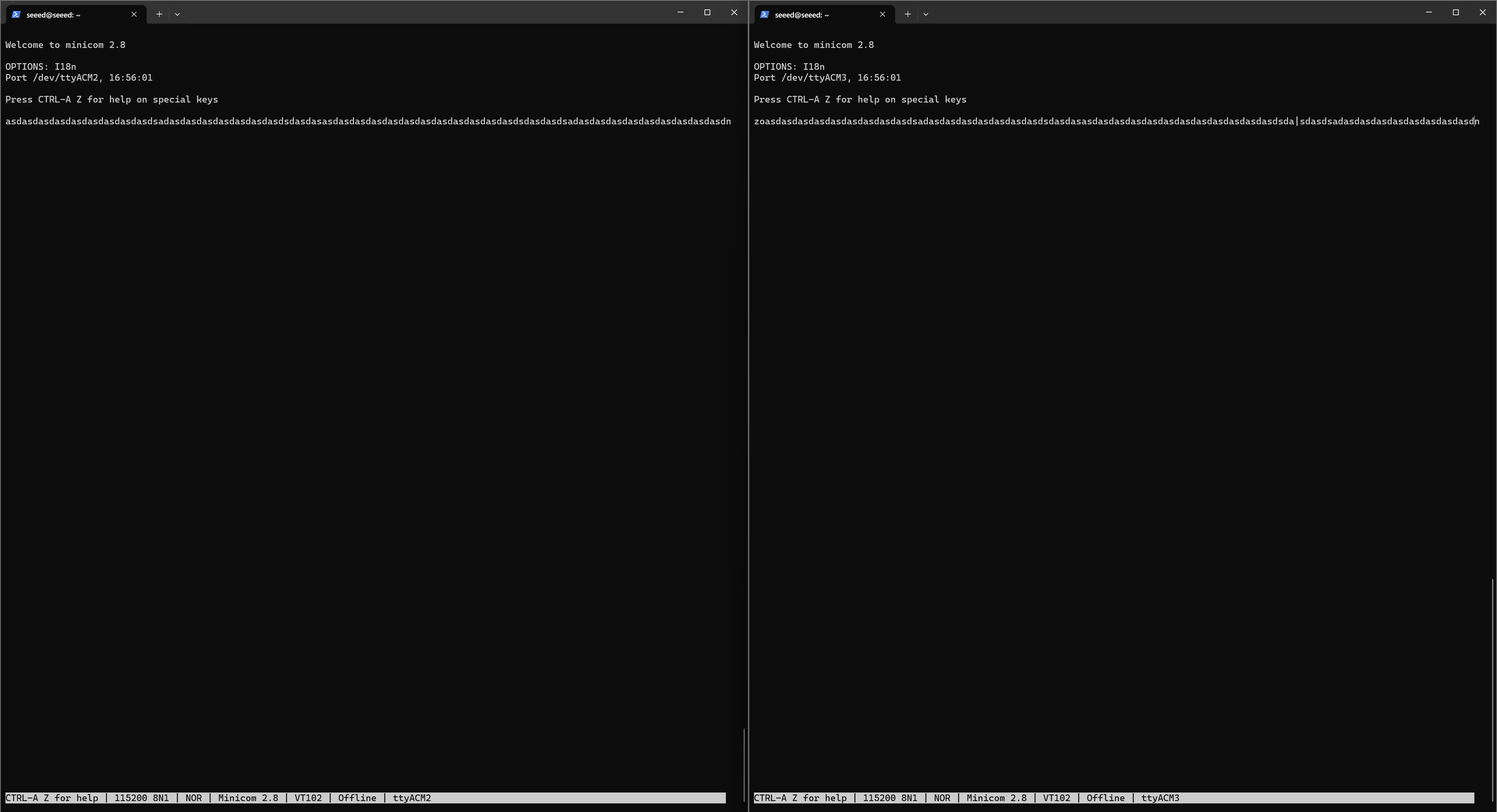
Tomando ACM2 y ACM3 como ejemplo: Si quieres enviar desde ACM2 a ACM3, ACM2 necesita configurarse de nuevo: ctrl+A , luego pulsa Z y luego E , y después inicia el comando de escritura del puerto serie. En este momento, puedes imprimir cadenas en ACM2 libremente, y podrás ver el contenido de ACM2 en ACM3 al mismo tiempo; A la inversa, si quieres enviar desde ACM3 a ACM2, ACM3 necesita configurarse de nuevo: ctrl+A, luego pulsa Z y luego E , y después inicia el comando de escritura del puerto serie. En este momento, puedes imprimir cadenas en ACM3 libremente, y podrás ver el contenido de ACM3 en ACM2 al mismo tiempo. Como se muestra en la figura.
Prueba de RS232
reComputer Industrial R21xx incluye 2x puertos RS232, y los correspondientes puertos COM y archivos de dispositivo son los siguientes:
| Número de puertos RS232 | Puerto COM | Etiqueta serigrafiada | Archivo de dispositivo |
|---|---|---|---|
| RS232-1 | COM1 | RX1/TX1/GND1 | /dev/ttyACM0 |
| RS232-2 | COM2 | RX2/TX2/GND2 | /dev/ttyACM1 |
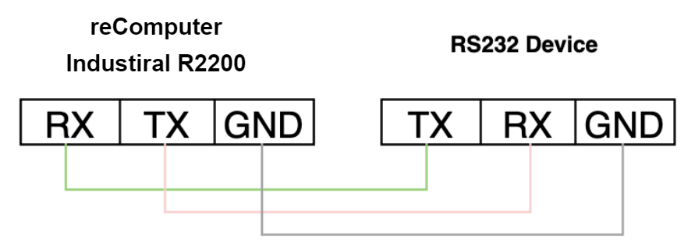
Dado que RS232 es comunicación full-dúplex, cortocircuita directamente el TX y el RX de RS232 para realizar una prueba de bucle de retorno.
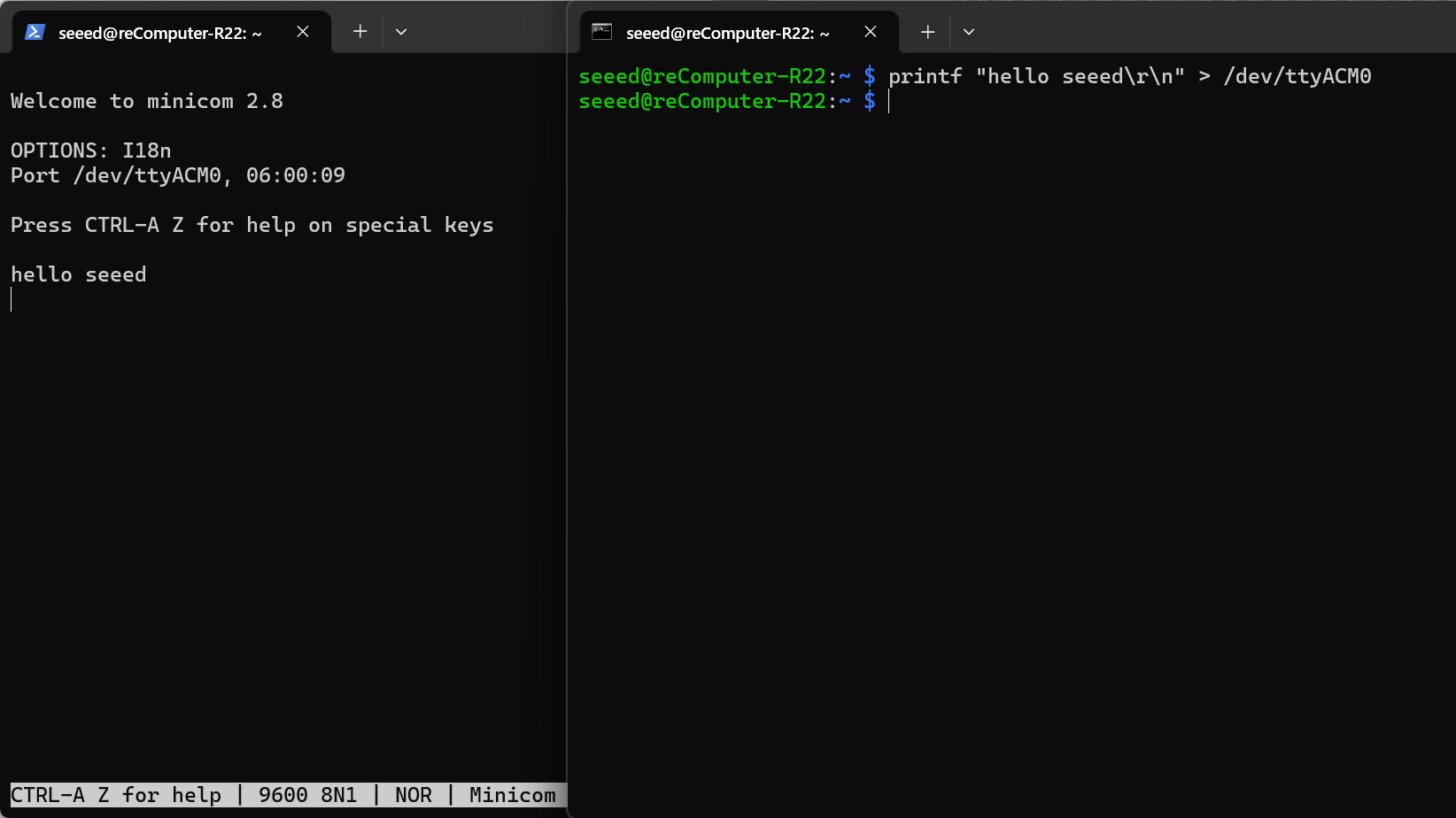
Necesitas abrir dos terminales, ACM1 si la placa de expansión está conectada, y ACM2 si la placa de expansión no está conectada: Terminal 1:*
sudo minicom -D /dev/ttyACM1 -b 9600
Si la placa de expansión no está conectada, necesitas cambiar /dev/ttyACM1 a /dev/ttyACM0 .
Terminal 2:
printf "hello seeed\r\n" > /dev/ttyACM1
El Terminal 1 mostrará el contenido que el Terminal 2 solicite imprimir.
Prueba de DI (Entrada Digital)
reComputer Industrial R21xx contiene 4x puertos DI, el usuario puede configurar estos puertos según las necesidades reales.
| Número de puertos | Puertos DI | GPIO extendido correspondiente |
|---|---|---|
| 4 | DI1 | GPIO588 |
| DI2 | GPIO589 | |
| DI3 | GPIO590 | |
| DI4 | GPIO595 |
El tipo de entrada de los puertos DI es PNP. Soporta tensión de entrada de 5VDC~24VDC, corriente - 1000mA. Para probar la funcionalidad de DI, puedes seguir estos pasos para probarla:
- Se ha completado la conexión entre el puerto DI de reComputer Industrial R21xx y la carga externa.
- Introduce el siguiente comando para obtener el estado del GPIO:
echo 588 > /sys/class/gpio/export
echo in > /sys/class/gpio/gpio588/direction
cat /sys/class/gpio/gpio588/value
- Cuando el nivel externo es alto, el valor de /sys/class/gpio/gpio588/value es 0; cuando el nivel externo es bajo, /sys/class/gpio/gpio588/value es 1.
DO (Salida Digital)
reComputer Industrial R21xx contiene 4x puertos DO, el usuario puede configurar estos puertos según las necesidades reales.
| Número de puertos | Puertos DI | GPIO extendido correspondiente |
|---|---|---|
| 4 | DO1 | GPIO638 |
| DO2 | GPIO637 | |
| DO3 | GPIO590 | |
| DO4 | GPIO636 | |
| DO5 | GPIO635 |
El tipo de salida de los puertos DO es transistor. Soporta tensión de salida - por debajo de 60 VDC, capacidad de corriente - 500 mA. Para probar la funcionalidad de DO, puedes seguir estos pasos para probarla:
- Se ha completado la conexión entre el puerto DO de reComputer Industrial R21xx y la carga externa.
- Introduce el siguiente comando para establecer la salida a nivel alto o nivel bajo:
echo 638 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio638/direction
echo 1 > /sys/class/gpio/gpio638/value
echo 0 > /sys/class/gpio/gpio638/value
- Cuando el nivel externo es alto, el valor de /sys/class/gpio/gpio638/value es 0; cuando el nivel externo es bajo, /sys/class/gpio/gpio638/value es 1.
Prueba de CAN
Prueba de bucle de retorno
| Número de puertos | Puertos DI | GPIO extendido correspondiente |
|---|---|---|
| 2 | CAN_H/CAN_L | can0 |
Dado que el reComputer Industiral R22xx está equipado solo con una única interfaz CAN, no puede realizar pruebas de bucle de retorno de forma independiente. Para verificar su funcionalidad de comunicación, se requiere un dispositivo par externo o un adaptador USB-a-CAN. Para esta prueba, el reComputer Industiral R21xx (que cuenta con interfaces CAN dobles) servirá como nodo par para establecer una conexión con el reComputer Industiral R22xx. Consulta el siguiente tutorial para conocer los esquemas de conexión específicos y los pasos de configuración:
- Utiliza dos cables DuPont para cortocircuitar H-H y L-L de can0 y can1 para formar una prueba de bucle mínimo.
CAN_H─────●───── CAN-H
CAN_L─────●───── CAN-L
G_CAN_H─────●───── G_CAN
- Confirma que las dos interfaces de red can0 y can1 sí aparecen en el sistema para evitar que el controlador no se cargue:
# should print can0 can1
ls /sys/class/net | grep can
# should see "successfully initialized"
dmesg | grep -i can
- Configura las dos interfaces CAN a 500 kbit/s y ponlas en línea, listas para enviar y recibir datos (ajústalas a nivel bajo por seguridad): R22xx:
sudo ip link set can0 down
sudo ip link set can0 up type can bitrate 500000
R21xx:
sudo ip link set can1 down
sudo ip link set can1 up type can bitrate 500000
- Prueba de comunicación (unidireccional) Utiliza can-utils para enviar y recibir datos.
Paso A: R21xx (CAN1) envía → R22xx (CAN0) recibe
-
R22xx: candump can0
-
R21xx: cansend can1 123#DE.AD.BE.EF.CA.FE.00.11
Paso B: R22xx (CAN0) envía → R21xx (CAN1) recibe
-
R21xx: candump can1
-
R22xx: cansend can0 555#1122334455667788
Prueba del concentrador USB
Para probar el concentrador USB, puedes seguir los siguientes pasos:
- Comprueba si el concentrador USB es detectado ejecutando el comando lsusb. Este comando lista todos los dispositivos USB conectados, incluidos los concentradores.
lsusb
Al ejecutar este comando se debería mostrar información sobre los dispositivos USB conectados a tu sistema, incluidos los concentradores USB presentes. Si el concentrador USB funciona correctamente, deberías ver sus detalles listados en la salida del comando lsusb. Si no aparece en la lista, puede haber un problema con el concentrador o con su conexión al sistema. En tales casos, es posible que necesites solucionar problemas del concentrador USB o de sus conexiones.
Prueba del RTC (reloj en tiempo real)
Para probar la funcionalidad del reloj en tiempo real (RTC), sigue estos pasos:
- Desactiva la sincronización automática de hora:
sudo systemctl stop systemd-timesyncd
sudo systemctl disable systemd-timesyncd
- Ajusta la hora: Configura el RTC a una fecha y hora específicas:
sudo hwclock --set --date "2025-10-23 16:00:00"
- Sincronizar la hora del RTC con el sistema Actualiza la hora del sistema para que coincida con la hora del RTC:
sudo hwclock --hctosys
- Comprueba la hora del RTC:
sudo hwclock -r
Este comando leerá y mostrará la hora almacenada en el RTC.
- Desconecta la fuente de alimentación del RTC, espera unos minutos, vuelve a conectarla y comprueba de nuevo la hora del RTC para ver si ha conservado la hora correcta.

Prueba del temporizador watchdog
Para realizar una prueba del watchdog, sigue estos pasos:
- Instala el software del watchdog:
sudo apt install watchdog
- Edita el archivo de configuración del watchdog:
# make sure you install vim already, if haven't, can install by the command below
sudo apt-get install vim
sudo vim /etc/watchdog.conf
Modifica la configuración de la siguiente manera:
watchdog-device = /dev/watchdog
# Uncomment and edit this line for hardware timeout values that differ
# from the default of one minute.
watchdog-timeout = 120
# If your watchdog trips by itself when the first timeout interval
# elapses then try uncommenting the line below and changing the
# value to 'yes'.
#watchdog-refresh-use-settimeout = auto
# If you have a buggy watchdog device (e.g. some IPMI implementations)
# try uncommenting this line and setting it to 'yes'.
#watchdog-refresh-ignore-errors = no
# ====================== Other system settings ========================
#
# Interval between tests. Should be a couple of seconds shorter than
# the hardware time-out value.
interval = 15
max-load-1 = 24
#max-load-5 = 18
#max-load-15 = 12
realtime = yes
priority = 1
Puedes ajustar otros parámetros según sea necesario.
- Asegúrate de que el servicio de watchdog se esté ejecutando:
sudo systemctl start watchdog
- Para probar la funcionalidad del watchdog, ejecuta el siguiente comando para simular un bloqueo del sistema:
sudo su
echo 1 > /proc/sys/kernel/sysrq
echo "c" > /proc/sysrq-trigger
Este comando desencadena un fallo del kernel y debería hacer que el watchdog reinicie el sistema.
- Supervisa el sistema para confirmar que se reinicia después del período de tiempo de espera especificado. Estos pasos te ayudarán a probar y garantizar la funcionalidad del temporizador watchdog en tu sistema.

Controlar el zumbador mediante GPIO
El GPIO correspondiente al zumbador es gpio627. Introduce el siguiente script para encender/apagar el zumbador:
- Encender el zumbador:
echo 627 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio627/direction
echo 1 > /sys/class/gpio/gpio627/value
- Apagar el zumbador :Turn off the buzzer :
echo 627 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio627/direction
echo 0 > /sys/class/gpio/gpio627/value
TPM 2.0
Si conectas un módulo TPM 2.0 al dispositivo, el siguiente código puede ayudar a comprobar la conexión TPM.
ls /dev | grep tpm
Interpretación de la salida:
Si ves tpm0 y tpmrm0 en la salida, significa que los dispositivos TPM (Trusted Platform Module) se detectan y están disponibles en tu sistema. Esto indica que el hardware TPM es reconocido y accesible, lo cual es una buena señal. Puedes continuar utilizando funcionalidades o aplicaciones relacionadas con TPM sabiendo que los dispositivos están presentes y accesibles.
ATECC608A
Para interactuar con el dispositivo ATECC608A y generar un número de serie aleatorio, sigue estos pasos:
- Clona el repositorio atecc-util:
curl -LJO https://github.com/wirenboard/atecc-util/releases/download/v0.4.12/atecc-util_0.4.12_arm64.deb
- Extrae el contenido del paquete .deb en el directorio actual:
dpkg -x ./atecc-util_0.4.12_arm64.deb .
- Navega al directorio atecc:
cd usr/bin
- Genera un número de serie aleatorio:
./atecc -b 10 -s 192 -c 'serial'
Este comando indica a la utilidad ATECC que use la ranura 10 (-b 10), establezca el tamaño del número de serie en 192 bits (-s 192) y genere un número de serie aleatorio (-c 'serial'). La salida será el número de serie generado, como "01235595d3d621f0ee". Este proceso te permite interactuar con el dispositivo ATECC608A y realizar varias operaciones, como generar números de serie aleatorios.
Interactuar con la EEPROM
Aquí están los comandos para interactuar con una EEPROM (memoria de solo lectura programable y borrable eléctricamente):
- Concede permisos completos (lectura, escritura y ejecución) al archivo de dispositivo de la EEPROM:
sudo chmod 777 /sys/bus/i2c/devices/10-0050/eeprom
- Escribe la cadena "This is a test string" en el dispositivo EEPROM:
echo "This is a test string" > /sys/bus/i2c/devices/10-0050/eeprom
- Lee el contenido del dispositivo EEPROM y lo muestra en formato hexadecimal usando la utilidad hexdump:
cat /sys/bus/i2c/devices/6-0050/eeprom | hexdump -C
Comprobación de la detección del SSD
Para listar los discos, incluido el SSD, puedes usar el comando fdisk -l. Aquí se indica cómo:
sudo fdisk -l
Este comando mostrará una lista de todos los discos conectados a tu sistema, incluido el SSD si se detecta correctamente. Busca las entradas que representen tu SSD. Normalmente comienzan con /dev/sd seguido de una letra (por ejemplo, /dev/sda, /dev/sdb, etc.). Una vez que identifiques la entrada correspondiente a tu SSD, puedes proceder a particionarlo o formatearlo según sea necesario.
SAI para apagado seguro
Se utiliza un GPIO6 entre la CPU y la entrada de alimentación de CC para avisar a la CPU cuando se interrumpe la fuente de alimentación. Entonces la CPU debería hacer algo urgente en un script antes de que se agote la energía del supercondensador y ejecutar un "$ shutdown". Otra forma de usar esta función es iniciar un apagado cuando cambie el pin GPIO. El pin GPIO dado se configura como una tecla de entrada que genera eventos KEY_POWER. Este evento es gestionado por systemd-logind iniciando un apagado.
- Conexión de hardware.
Asegúrate de que el pin 'CM5_UPS_DET' del dispositivo SAI esté conectado al pin GPIO16 del dispositivo R21xx.
- Modifica el archivo de configuración.
- Abre la terminal.
- Ejecuta el siguiente comando para editar el archivo de configuración:
sudo nano /boot/firmware/config.txt
- Añade el siguiente contenido al final del archivo:
dtoverlay=gpio-shutdown,gpio_pin=GPIO16,active_low=1
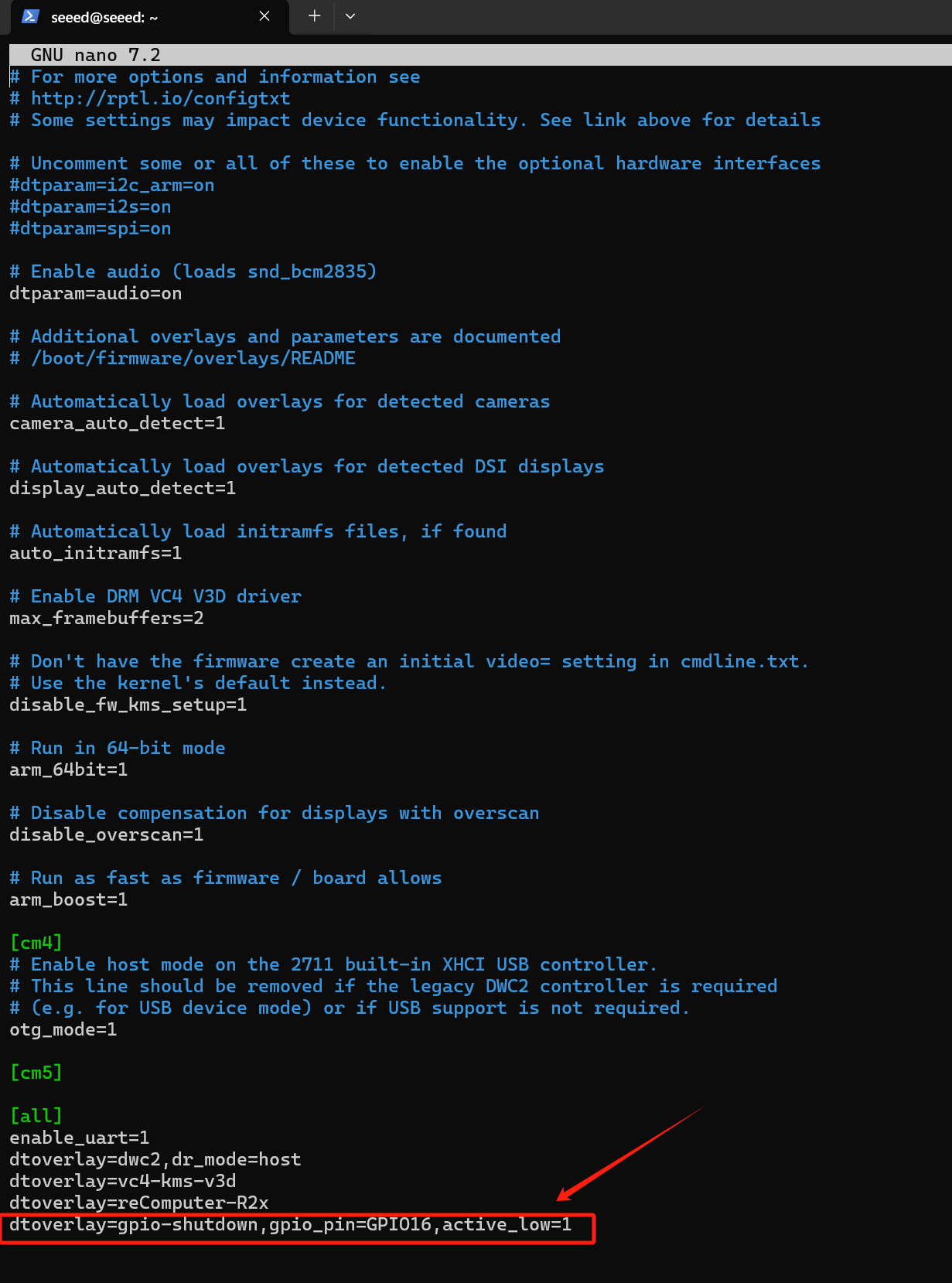
Guarda y sal del editor (pulsa Ctrl+O para guardar, Enter para confirmar y Ctrl+X para salir).
- Prepara el script de Python
- Crea un nuevo archivo de script de Python:
cd ~
sudo nano ups_shutdown.py
- Copia y pega el siguiente código en el archivo:
import RPi.GPIO as GPIO
import time, os
num = 0
GPIO.setmode(GPIO.BCM)
# Set GPIO16 to input mode
# Add 500ms anti-shake time to stabilize the software
GPIO.setup(16, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.add_event_detect(16, GPIO.FALLING, bouncetime=500)
while True:
if GPIO.event_detected(16):
print("...External power off...")
print("")
# Sync data to disk
os.system('sync')
print("...Data saving...")
print("")
# Sleep for 3 seconds
time.sleep(3)
# Synchronize data again
os.system('sync')
# Countdown 5 seconds
while num < 5:
print('----------')
s = 5 - num
print('---' + str(s) + '---')
num = num + 1
time.sleep(1)
print('----------')
# Execute shutdown command
os.system('sudo shutdown -h now')
Guarda y sal del editor (pulsa Ctrl+O para guardar, Enter para confirmar y Ctrl+X para salir).
- Ejecuta el script.
- Abre la terminal.
- Ejecuta el siguiente comando para correr el script:
sudo python3 ups_shutdown.py
Usa sudo para asegurarte de que el script tenga permisos suficientes para ejecutar el comando de apagado.
- Simular prueba de fallo de alimentación
- Corta la alimentación externa.
- Observa si el sistema guarda automáticamente los datos y se apaga.
- Verificar el resultado
- Vuelve a conectar la alimentación.
- Comprueba si los datos del sistema están completos y si arranca con normalidad.
- Para la función de UPS, ponte en contacto con nosotros para obtener más información.
- La señal de alarma es activa en LOW.
Acelerador de IA
La ranura M.2 M-KEY 2240 del reComputer Industrial R21xx está diseñada para alojar un acelerador de IA M.2 PCIE. Y la serie R21xx-12 viene preinstalada con un módulo Hailo-8 M.2 de aceleración de IA de hasta 26TOPS. Si compraste el producto de la serie R21xx-10, tendrás que adquirir el módulo NPU de Hailo para habilitar la funcionalidad de IA. El dispositivo viene con el controlador del acelerador Hailo preinstalado, por lo que puedes usarlo directamente y ejecutar el caso de prueba:
- Navega al directorio del caso de prueba
cd /mnt/hailo-rpi5-examples/
- Inicia el entorno virtual
source ./setup_env.sh
- Ejecuta el ejemplo de detección simple
python basic_pipelines/detection_simple.py
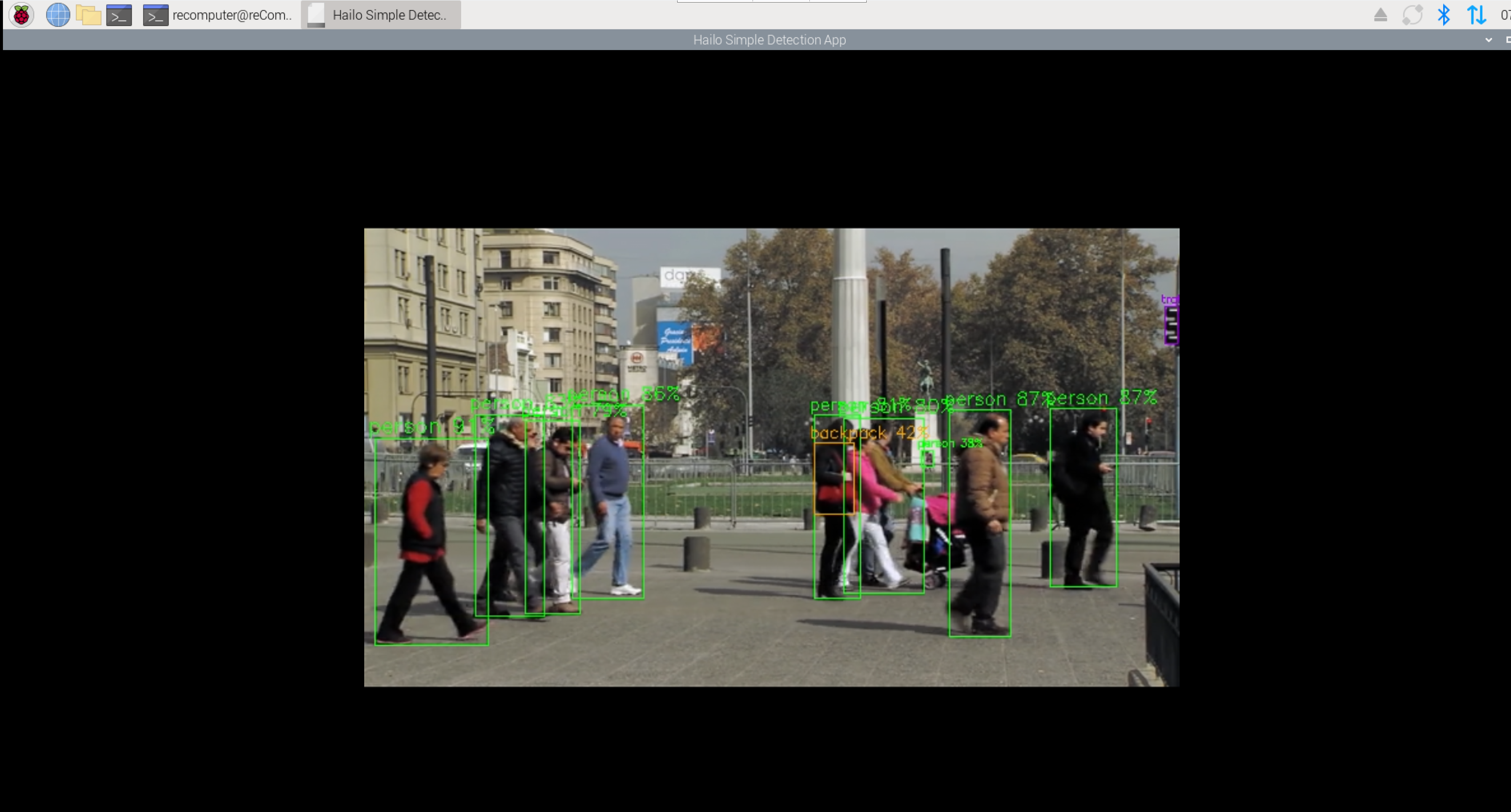
Para cerrar la aplicación, pulsa Ctrl+C .
Esta es una versión ligera del ejemplo de detección, centrada principalmente en demostrar el rendimiento de Hailo mientras se minimiza la carga de la CPU. El flujo interno de procesamiento de vídeo de GStreamer se simplifica minimizando las tareas de procesamiento de vídeo, y se utiliza el modelo YOLOv6 Nano.
Si el reComputer que compraste no incluye Hailo-8 y estás considerando adquirir un dispositivo Hailo para integrarlo, consulta la documentación oficial de Hailo (https://github.com/hailo-ai) para configurar el firmware y el entorno, y ejecutar los ejemplos para verificar que el dispositivo pueda utilizarse con normalidad.
Cámara IP PoE
La serie reComputer Industrial R22xx está diseñada para flujos de vídeo IP de alta densidad y automatización industrial. Cuenta con 5 puertos físicos Gigabit Ethernet con una arquitectura de bus híbrida para garantizar el máximo ancho de banda y estabilidad.
Distribución del bus interno:
- eth0 (Nativo): Conectado directamente al SoC. Ofrece la latencia más baja y se recomienda como Enlace ascendente principal (WAN) o Puerto de gestión.
- eth1 (Extensión USB): El puerto independiente situado junto al puerto nativo. Se extiende a través del bus USB 3.0 y admite salida PoE.
- eth2, eth3, eth4 (Extensión PCIe): Los tres puertos consecutivos. Se extienden a través del bus PCIe y admiten salida PoE.
- Especificaciones técnicas
| Categoría | Especificación | Notas |
|---|---|---|
| Puertos totales | 1 (Nativo) + 4 (Extendidos) | 5x RJ45 Gigabit Ethernet |
| Modo PoE | Alternativa A (Modo A) | Alimentación suministrada sobre los pares de datos (1/2, 3/6) |
| Salida PoE por puerto | 12W (Máx) | Optimizado para cámaras IP estándar |
| Salida PoE en paralelo | Los 4 puertos admiten 12W simultáneamente | Requiere suficiente potencia de entrada del sistema |
| Rango de entrada de alimentación | 9V - 36V DC | El circuito elevador interno aumenta hasta 48V para PoE |
| Características de seguridad | Protección contra sobrecorriente y subtensión | El hot-plug está estrictamente prohibido |
- Directrices críticas de seguridad
- NO HOT-PLUGGING:
ADVERTENCIA: Conectar o desconectar cables Ethernet mientras la alimentación PoE está activa (GPIO en High) puede causar picos transitorios que pueden dañar los chips LAN7800 o los puentes PCIe. Sigue siempre el principio de "Conectar primero, alimentar después".
- Recomendaciones de alimentación:
Aunque el dispositivo admite entrada de 9V, recomendamos usar una fuente de alimentación industrial de 24V con al menos 72W (3A) de capacidad para garantizar una alta eficiencia de conversión cuando los 4 puertos PoE están a plena carga (4 × 12W).
- Pasos de configuración
- Paso 1: Deshabilitar servicios en conflicto
Para evitar que los gestores de red de escritorio sobrescriban la configuración industrial de IP estática, deshabilita
NetworkManager.
# Switch to systemd-networkd
sudo systemctl disable --now NetworkManager
sudo systemctl mask NetworkManager
sudo systemctl enable --now systemd-networkd
- Paso 2: Habilitar alimentación automática para PoE (GPIO)
Añade los siguientes comandos a
/etc/rc.localantes de la líneaexit 0para asegurarte de que la alimentación PoE se habilite al arrancar.
# Export and set PoE Enable Pin (Example: GPIO 532)
echo 652 > /sys/class/gpio/export
echo out > /sys/class/gpio/gpio652/direction
echo 1 > /sys/class/gpio/gpio652/value
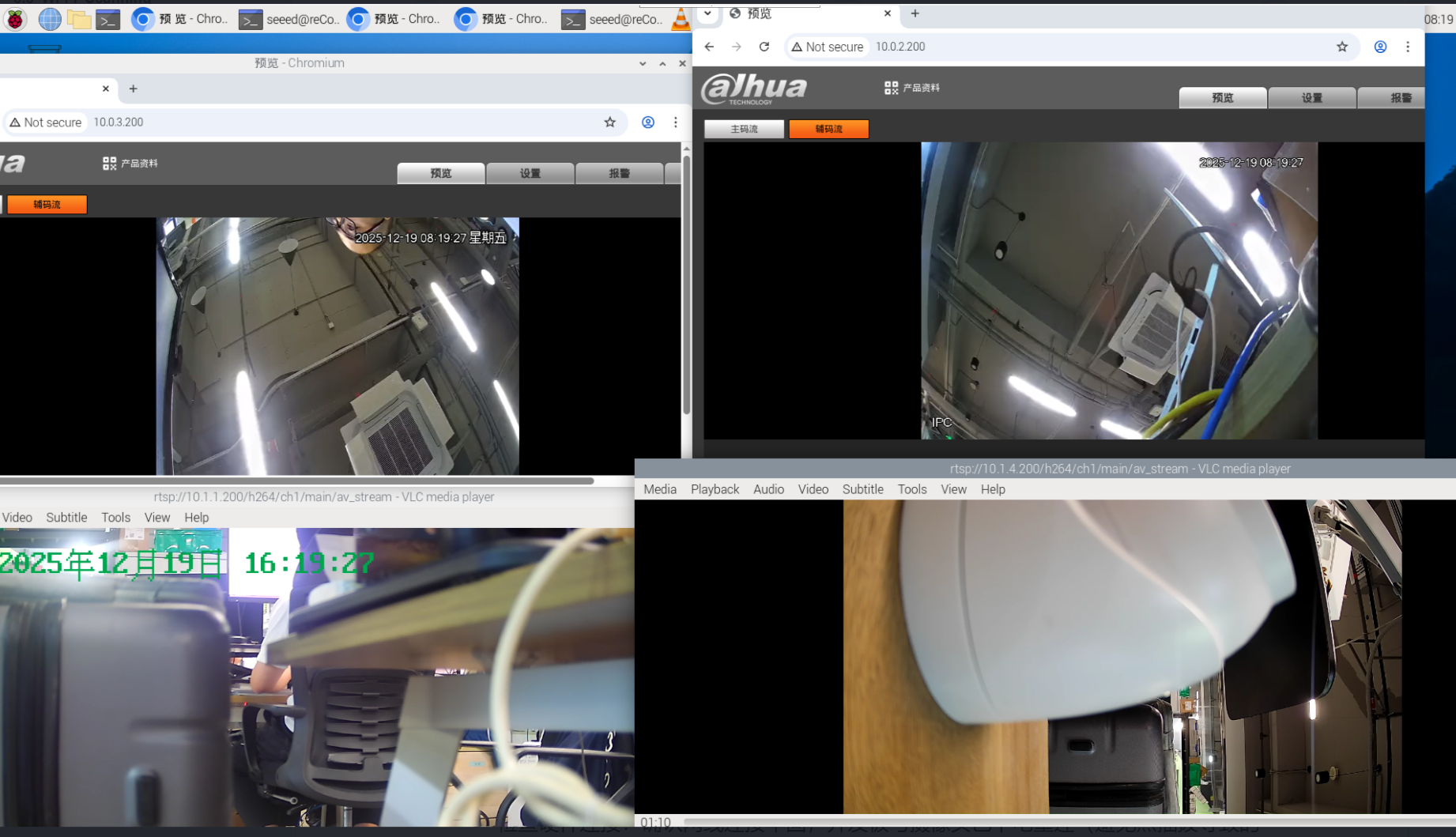
- Paso 3: Despliegue de IP multi-interfaz
Asigna subredes independientes a cada puerto y utiliza RouteMetric para asegurarte de que
eth0siga siendo la puerta de enlace predeterminada para el acceso a Internet.
# Configure eth0 (WAN/DHCP) - Highest Priority
sudo bash -c 'cat > /etc/systemd/network/10-eth0.network <<EOF
[Match]
Name=eth0
[Network]
DHCP=yes
[DHCPv4]
RouteMetric=10
EOF'
# Configure eth1-eth4 (Static IP Segments)
for i in {1..4}; do
sudo bash -c "cat > /etc/systemd/network/20-eth$i.network <<EOF
[Match]
Name=eth$i
[Network]
Address=10.0.$((i+2)).10/24
[IPv4]
RouteMetric=$((100+i))
EOF"
done
- Verificación y resolución de problemas
- Comprobar conectividad del bus
Usa
lspciylsusbpara verificar que todos los controladores sean reconocidos por el sistema:
- Puertos extendidos PCIe (eth2-4): Ejecuta
lspci | grep Ethernet - Puerto extendido USB (eth1): Ejecuta
lsusb -ty busca el controladorlan78xx.
- Preguntas frecuentes
- P: ¿Por qué mi cámara se reinicia constantemente?
- R: Comprueba si el consumo de energía de la cámara supera los 12W. Las cámaras PTZ de alta potencia o aquellas con potentes iluminadores IR pueden superar este límite.
- P: ¿Puedo usar entrada de 12V DC para PoE?
- R: Sí. El circuito interno elevará 12V a 48V. Sin embargo, asegúrate de que tu fuente de alimentación de 12V pueda manejar una corriente alta, ya que la pérdida de conversión es mayor a voltajes de entrada más bajos.
- P: El nombre de la interfaz no es eth1-4.
- R: Usa
ip linkpara encontrar el nombre real del kernel (por ejemplo,enp1s0) y actualiza el campoName=en tus archivos.network.
- R: Usa
- Estado de compatibilidad con cámaras PoE de 4 canales:
reComputer R22 & reCamera
Esta guía proporciona un recorrido paso a paso para conectar una reCamera — una cámara de IA modular y de código abierto basada en la plataforma RISC-V y diseñada para un rápido despliegue de Edge AI — al reComputer R22 a través de PoE. Cubre el despliegue de un flujo RTSP usando Node-RED y la previsualización de la transmisión en vivo en el R22.
- Conexión de hardware e inicialización
- Modelos compatibles: serie reCamera (versión PoE, por ejemplo, LH-AR01).
- Conexión física: Conecta la reCamera a cualquier puerto PoE (eth1-eth4) del R22 usando un cable Ethernet estándar.
- Habilitar alimentación PoE:
Ejecuta los siguientes comandos en la terminal del R22 para habilitar la salida de 48V:
# Enable GPIO 652
echo 652 > /sys/class/gpio/export
echo out > /sys/class/gpio/652/direction
echo 1 > /sys/class/gpio/652/value

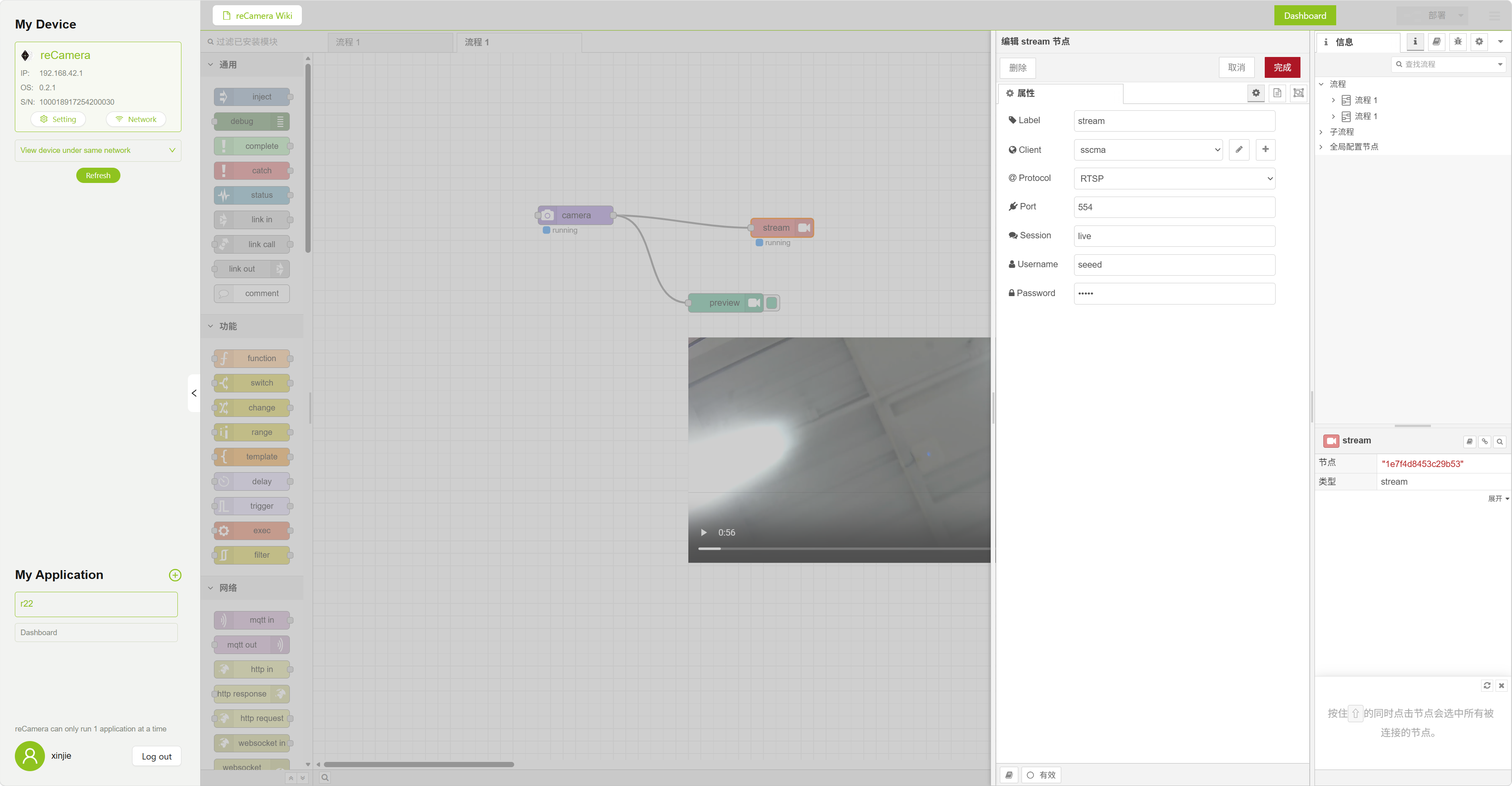
- Configuración de reCamera (Importación Node-RED con un clic)
Usa el flows.json preconfigurado para desplegar rápidamente un flujo RTSP autenticado.
- Acceder al panel: Abre tu navegador y ve a
http://10.0.3.200:1880(IP predeterminada de reCamera). - Importar configuración:
- Haz clic en el icono de menú
≡en la esquina superior derecha -> Import. - Sube el archivo flows.json y haz clic en Import.
- Haz clic en el icono de menú
- Autenticación personalizada (Obligatoria):
- Haz doble clic en el nodo
RTSP Outputen el flujo. - En la sección Authentication, establece tus credenciales:
- Username:
seeed - Password:
seeed
- Username:
- Haz doble clic en el nodo
- Deploy: Haz clic en el botón rojo Deploy en la esquina superior derecha.
- Previsualización del flujo de vídeo en el R22
Dado que el R22 (basado en CM4/CM5) admite decodificación por hardware, recomendamos usar VLC o FFplay para la verificación.
- Opción A: Usar la interfaz gráfica de VLC (Recomendado)
- Escribe
vlcen la terminal del R22 para abrir el reproductor. - Ve a Media -> Open Network Stream.
- Introduce la URL RTSP autenticada:
rtsp://seeed:[email protected]:554/live - Haz clic en Play.
- Opción B: Usar la línea de comandos (Prueba rápida)
Copia y ejecuta directamente el siguiente comando:
ffplay -fflags nobuffer -flags low_delay rtsp://seeed:[email protected]:554/live
- Resolución de problemas
| Problema | Causa potencial | Solución |
|---|---|---|
| No se puede hacer ping a 10.0.3.200 | Conflicto de IP interna del R22 | Comprueba si eth3/eth4 usan ambos 10.0.3.10. Cambia uno manualmente. |
| reCamera no arranca | Alimentación PoE no habilitada | Asegúrate de que GPIO 652 esté establecido en 1 y que la alimentación de entrada sea > 12V/3A. |
| Retraso/latencia de vídeo | Problemas de red o MTU | Asegúrate de que no haya tráfico de difusión intenso entre el R22 y la reCamera. |
Soporte técnico y debate sobre el producto
Gracias por elegir nuestros productos. Estamos aquí para ofrecerte diferentes tipos de soporte y garantizar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para adaptarnos a diferentes preferencias y necesidades.