Hardware y primeros pasos con la carrier board Robotics J401
La reComputer Robotics J401 es una carrier board compacta y de alto rendimiento para edge AI, diseñada para robótica avanzada. Compatible con los módulos NVIDIA Jetson Orin Nano/Orin NX en modo Super/MAXN, ofrece hasta 157 TOPS de rendimiento de IA. Equipada con amplias opciones de conectividad —incluyendo puertos Ethernet Gigabit dobles, ranuras M.2 para módulos 5G y Wi‑Fi/BT, 6 puertos USB 3.2, CAN, GMSL2 (mediante expansión opcional), I2C y UART— funciona como un potente cerebro robótico capaz de procesar datos complejos de varios sensores. Con JetPack 6 y Linux BSP preinstalados, garantiza un despliegue sin inconvenientes.
Al ser compatible con frameworks como NVIDIA Isaac ROS, Hugging Face, PyTorch y ROS 2/1, la reComputer Robotics J401 conecta la toma de decisiones impulsada por modelos de lenguaje grandes con el control físico de la robótica, como la planificación de movimiento y la fusión de sensores. Ideal para el desarrollo rápido de robots autónomos, acelera el tiempo de salida al mercado con interfaces listas para usar y frameworks de IA optimizados.

Descripción general de la Carrier Board reComputer Jetson Robotics J401
| Vista superior |
|---|
 |
| Vista superior |
 |
| Vista superior |
 |
Lista de componentes
- Carrier Board reComputer Robotics J401 x 1
- Fuente de alimentación y placa de expansión JST x 1
- Cable XT30 a DC x 1
- Cable USB, Tipo A a Tipo C x 1
- Disipador para placa de expansión x 1
- Espárrago (M3*30) x 5
- Tuerca hexagonal M3 x 5
- Tornillo (CM2.5*L.4) para módulo Jetson y M.2 Key M x3
- Tornillo (CM2*3.0) para M.2 Key E x1
- Espárrago (M2*2.0) para M.2 Key B x1
- Tornillo (CM3*4.0) para M.2 Key B x1
- Manual de usuario x 1
1.Por favor, diseñe una solución de disipación de calor robusta de acuerdo con la Thermal Design Guide cuando utilice una fuente de alimentación de alto voltaje y a temperatura de funcionamiento elevada. 2.Por favor, coloque un disipador en el módulo para un mejor rendimiento. 3.Durante el funcionamiento con entrada de alto voltaje y alta carga, no toque el disipador para evitar quemaduras. 4.Recomendación de adaptador de corriente para validación: utilice el adaptador de corriente recomendado en el sitio web oficial de Seeed.
- Adaptador de corriente con conector Barrel Jack 5525 de 19V/4.74A
- Asegúrese de que se cumplan los requisitos de consumo máximo de energía. 2.Compatibilidad del cable de alimentación de CA
- Compre cables de alimentación de CA tipo trébol específicos de la región según su ubicación. 3.Compatibilidad de accesorios
- Utilice solo accesorios recomendados oficialmente (por ejemplo, módulos inalámbricos, cámaras, periféricos) para un rendimiento y compatibilidad óptimos.
Especificación
Especificaciones de la carrier board
| Categoría | Elemento | Detalles |
|---|---|---|
| Almacenamiento | M.2 KEY M PCIe | 1x M.2 KEY M PCIe (incluye SSD M.2 NVMe 2280 de 128G) |
| Red | M.2 KEY E | 1x M.2 Key E para módulo WiFi/Bluetooth |
| M.2 KEY B | 1x M.2 Key B para módulo 5G | |
| Ethernet | 2x RJ45 Ethernet Gigabit | |
| I/O | USB | 6x USB 3.2 Tipo‑A (5Gbps); 1x USB 3.0 Tipo‑C (Host/DP 1.4); 1x USB 2.0 Tipo‑C (Device Mode/Debug) |
| Cámara | 1x 4 en 1 GMSL2 (mini fakra) (placa opcional) | |
| CAN | 2x CAN0 (XT30(2+2)); 3x CAN1 (conector GH 1.25 de 4 pines) | |
| Pantalla | 1x DP1.4 (Tipo C Host) | |
| UART | 1x UART con conector GH 1.25 de 4 pines | |
| I2C | 2x I2C con conector GH 1.25 de 4 pines | |
| Ventilador | 1x conector de ventilador de 4 pines (5V PWM); 1x conector de ventilador de 4 pines (12V PWM) | |
| Puerto de expansión | 1x encabezado de expansión de cámara (para placa GMSL2) | |
| RTC | 1x RTC de 2 pines; 1x zócalo RTC | |
| LED | 3x LED (PWR, ACT y LED de usuario) | |
| Botón de orificio | 1x PWR; 1x RESET | |
| Interruptor DIP | 1x REC | |
| Agujero para antena | 5x agujero para antena | |
| Alimentación | 19-54V XT30(2+2) (incluye cable XT30 a conector DC 5525) | |
| Versión de Jetpack | Jetpack 6 | |
| Mecánico | Dimensiones (W x D x H) | 115mm x 115mm x 38mm |
| Peso | 200g | |
| Instalación | Escritorio, montaje en pared | |
| Temperatura de funcionamiento | -20℃~60℃ (modo 25W); -20℃~55℃ (modo MAXN); (con disipador reComputer Robotics con ventilador) | |
| Garantía | 2 años | |
| Certificación | RoHS, REACH, CE, FCC, UKCA, KC | |
Flashear el sistema operativo JetPack
Módulo compatible
- NVIDIA® Jetson Orin™ Nano Module 4GB
- NVIDIA® Jetson Orin™ Nano Module 8GB
- NVIDIA® Jetson Orin™ NX Module 8GB
- NVIDIA® Jetson Orin™ NX Module 16GB
Requisitos previos
- PC host con Ubuntu
- Carrier Board Robotics J401
- Módulo NVIDIA® Jetson Orin™ Nano/NX
- Ventilador activo para módulo Nano/NX
- SSD interno NVMe M.2 2280
- Cable de transmisión de datos USB Tipo‑C
Recomendamos que utilice dispositivos host físicos con Ubuntu en lugar de máquinas virtuales. Consulte la tabla siguiente para preparar la máquina host.
| JetPack Version | Ubuntu Version (Host Computer) | ||
| 18.04 | 20.04 | 22.04 | |
| JetPack 6.x | ✅ | ✅ | |
Preparar la imagen de Jetpack
Aquí necesitamos descargar la imagen del sistema en nuestro PC con Ubuntu correspondiente al módulo Jetson que estamos utilizando:
| Versión de Jetpack | Módulo Jetson | GMSL | Enlace de descarga1 | SHA256 |
|---|---|---|---|---|
| 6.2 | Orin Nano 4GB | ✅ | Download | c63d1219531245abecc7bbdcafc73d3 4f75547454c7af85de40f08396a87e5ee |
| Orin Nano 8GB | ✅ | Download | 5d1f3cd28eb44ca60132c87ccce5aca f806ee945b486df9061a34de73fbb582b | |
| Orin NX 8GB | ✅ | Download | e7f0c8e6b578d411f81122879f92c76 66adfada5ed493a4cc458dc169ca8c1b7 | |
| Orin NX 16GB | ✅ | Download | b08cbdad8ab6e50222146d3175a9d2 627d499bf1d67cfaf69cc737b5bfa9e33a |
El archivo de imagen de Jetpack6 tiene un tamaño aproximado de 14.2GB y debería tardar alrededor de 60 minutos en descargarse. Por favor, espere a que la descarga se complete.
Para verificar la integridad del firmware descargado, puede comparar el valor hash SHA256.
En una máquina host con Ubuntu, abra la terminal y ejecute el comando sha256sum <File> para obtener el valor hash SHA256 del archivo descargado. Si el hash resultante coincide con el hash SHA256 proporcionado en el wiki, se confirma que el firmware que descargó está completo e intacto.
Entrar en modo Force Recovery
Antes de poder continuar con los pasos de instalación, debemos asegurarnos de que la placa esté en modo force recovery.
Paso a paso
Paso 1. Cambie el interruptor al modo RESET.

Paso 2. Enciende la placa carrier conectando el cable de alimentación.
Paso 3. Conecta la placa al PC host con Ubuntu mediante un cable de transmisión de datos USB Type-C.
Paso 4. En el PC host con Linux, abre una ventana de Terminal e introduce el comando lsusb. Si el contenido devuelto incluye una de las siguientes salidas según el Jetson SoM que utilices, entonces la placa está en modo de recuperación forzada.
- Para Orin NX 16GB: 0955:7323 NVidia Corp
- Para Orin NX 8GB: 0955:7423 NVidia Corp
- Para Orin Nano 8GB: 0955:7523 NVidia Corp
- Para Orin Nano 4GB: 0955:7623 NVidia Corp
La siguiente imagen es para Orin Nano 8GB

Flashear a Jetson
Paso 1: Extrae el archivo de imagen descargado:
cd <path-to-image>
sudo tar xpf mfi_xxxx.tar.gz
# For example: sudo tar xpf mfi_recomputer-robo-orin-nano-8g-j401-gmsl-6.2-36.4.3-2026-02-06.tar.gz
Paso 2: Ejecuta el siguiente comando para flashear el sistema JetPack en el SSD NVMe:
cd mfi_xxxx
# For example: cd mfi_recomputer-orin-robotics-j401
sudo ./tools/kernel_flash/l4t_initrd_flash.sh --flash-only --massflash 1 --network usb0 --showlogs
Verás la siguiente salida si el proceso de flasheo se completa correctamente

El comando de flasheo puede tardar entre 2 y 10 minutos.
Paso 3: Conecta la Robotics J401 a una pantalla usando el adaptador PD a HDMI para conectarla a una pantalla que admita entrada HDMI, o conéctala directamente a una pantalla que admita entrada PD usando el cable PD, y completa la configuración inicial:

Completa la System Configuration según tus necesidades.
Uso de interfaces
A continuación se presentarán las distintas interfaces de la placa Robotics J401 y cómo utilizarlas.
M.2 Key M
M.2 Key M está diseñado para SSD NVMe de alta velocidad, proporcionando una transferencia de datos ultrarrápida para aplicaciones de robótica.
Los SSD compatibles son los siguientes
- 128GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 256GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 512GB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 1TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
- 2TB NVMe M.2 PCle Gen3x4 2280 Internal SSD
Conexión de hardware

Instrucciones de uso
Abre la terminal en el dispositivo Jetson e introduce el siguiente comando para probar la velocidad de lectura y escritura del SSD.
#You need to create a blank test file first
sudo touch /ssd/test
dd if=/dev/zero of=/home/seeed/ssd/test bs=1024M count=5 conv=fdatasync

Ejecuta el comando sudo rm /home/seeed/ssd/test para eliminar los archivos de caché después de completar la prueba.
M.2 Key B
La ranura M.2 Key B es para la expansión con un módulo 5G, lo que permite conectividad celular de alta velocidad para escenarios de robótica e IA en el borde.
Conexión de hardware

Instrucciones de uso
Paso 1. Comprobar el reconocimiento del hardware
lsusb
Este comando muestra una lista de todos los dispositivos USB conectados al sistema, junto con su fabricante (ID), tipo y otra información. Por ejemplo, la salida podría mostrar un dispositivo de Quectel Wireless Solutions Co., Ltd. EM12-G, lo que indica que el módulo 5G está presente.

Paso 2. Confirmar la carga del controlador Es esencial asegurarse de que el controlador option, que se requiere para el módulo 5G, esté cargado. Podemos usar el comando lsmod para comprobarlo.
lsmod | grep option
Si el controlador option se carga correctamente, se mostrará en la salida la información relevante sobre el controlador.

Paso 3. Configurar ModemManager ModemManager es una herramienta para gestionar dispositivos módem, y necesita ser instalada y reiniciada.
sudo apt install modemmanager
sudo systemctl restart ModemManager
El comando apt install se utiliza para instalar el paquete ModemManager, mientras que systemctl restart reinicia el servicio ModemManager para asegurarse de que la nueva configuración surta efecto.
Paso 4. Verificar la identificación del módulo Podemos usar el comando mmcli -L para comprobar si ModemManager puede identificar correctamente el módulo 5G.
mmcli -L
Si se reconoce el módulo 5G, se mostrará una salida similar a /org/freedesktop/ModemManager1/Modem/0, lo que indica la ruta al dispositivo módem detectado.

Paso 5. Configurar el APN El APN (Access Point Name) es crucial para conectar un dispositivo móvil a la red. Usaremos el comando nmcli para crear un perfil de portador. Tomando China Mobile como ejemplo, podemos crear un archivo de configuración con los siguientes comandos:
sudo nmcli con add type gsm ifname "*" apn "CMNET" ipv4.method auto
Este comando añade una nueva conexión de tipo GSM (Global System for Mobile Communications), especificando el APN como "CMNET" y utilizando configuración IPv4 automática.

Paso 6. Activar la conexión Después de crear el perfil de portador, necesitamos activar la conexión.
sudo nmcli con up "gsm"
Este comando activa la conexión GSM y, si tiene éxito, se mostrará un mensaje de confirmación.
Paso 7. Volver a verificar la identificación del módulo Ejecuta de nuevo el comando mmcli -L para asegurarte de que el módulo sigue siendo reconocido después de configurar el APN.
mmcli -L
Paso 8. Comprobar el estado del módulo Finalmente, podemos usar el comando mmcli -m 0 para ver información detallada sobre el módulo, como la asignación de IP, el operador y el estado de la conexión de red.
mmcli -m 0
Este comando proporciona detalles completos sobre el módulo 5G, incluido su fabricante, modelo, tecnologías de red compatibles y actuales, estado del dispositivo y operadores de red conectados.

M.2 Key E
La interfaz M.2 Key E es un conector M.2 estándar que se utiliza principalmente para conectar módulos inalámbricos, como Wi-Fi y Bluetooth, para ampliar las capacidades de comunicación inalámbrica.
Conexión de hardware

Instrucciones de uso
Para probar el rendimiento de Wi-Fi, utiliza el siguiente comando (sustituye la dirección IP por la de tu servidor de pruebas):
iperf3 -c 192.168.6.191

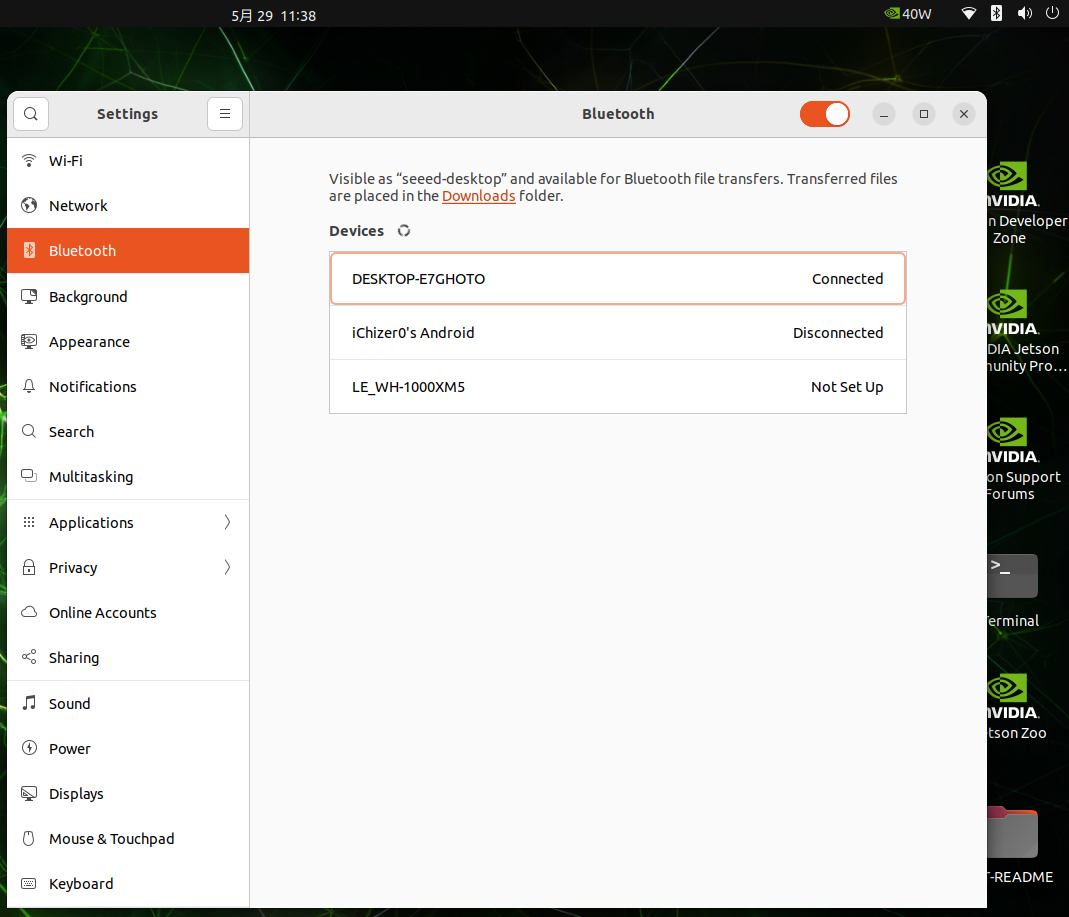
La funcionalidad Bluetooth está disponible a través de la ranura M.2 Key E.
Ethernet
La placa carrier Robotics J401 incorpora 2 puertos Ethernet RJ45 de 1Gbps para conectividad de red cableada de alta velocidad.

Para probar la velocidad del puerto Ethernet, utiliza iperf3 de la siguiente manera:
iperf3 -c <server_ip> -B <bind_ip>
<server_ip> es la dirección IP del servidor iperf3. El cliente se conectará a este servidor para realizar una prueba de ancho de banda.
<bind_ip> vincula la dirección IP local especificada como origen del tráfico de prueba.

LED
La reComputer Jetson Robotics J401 incorpora 3 indicadores LED (PWR, ACT y User LED) que proporcionan una indicación clara del estado de la alimentación, la actividad del sistema y funciones definidas por el usuario.

Instrucciones de uso
El User LED es un LED RGB que puede mostrar diferentes colores para indicar varios estados, y debe ser definido por el usuario.
Aquí hay un script de prueba para controlar el LED RGB:
touch rgb_test
chmod +x rgb_test
vi rgb_test
Pega el siguiente contenido:
#!/bin/bash
# RED ON
gpioset --mode=time --sec=1 2 0=1
sleep 2
# RED OFF
gpioset --mode=time --sec=1 2 0=0
# Blue ON
gpioset --mode=time --sec=1 2 1=1
sleep 2
# Blue OFF
gpioset --mode=time --sec=1 2 1=0
# Green ON
gpioset --mode=time --sec=1 2 2=1
sleep 2
# Green OFF
gpioset --mode=time --sec=1 2 2=0
Ejecuta el script para probar el LED RGB.

USB
La placa carrier Robotics J401 está equipada con una variedad de puertos USB, incluidos 6 puertos USB 3.2 Type-A (5Gbps), un puerto USB 3.0 Type-C con DP 1.4 (modo Host) y un puerto USB 2.0 Type-C para modo dispositivo/depuración, ofreciendo opciones de conectividad versátiles.
Prueba de velocidad USB
Crea un script para probar la velocidad del dispositivo USB:
sudo vim test_usb
Pega el siguiente contenido:
#!/bin/bash
sudo dd if=/dev/zero of=/dev/$1 bs=1000M count=2 conv=fdatasync
sleep 1
sudo sh -c "sync && echo 3 > /proc/sys/vm/drop_caches"
sleep 1
sudo dd if=/dev/$1 of=/dev/null bs=1000M count=2
Haz que el script sea ejecutable:
sudo chmod +x test_usb
Ejecuta el script con el nombre de tu dispositivo USB como argumento.
Puerto USB 2.0 Type-C
Usando este puerto serie, a través del cable de datos USB C, puedes monitorizar en el PC la información de depuración de entrada y salida.
Paso 1. Cambia el interruptor al modo de depuración.

Paso 2. Conecta el PC mediante un cable de datos USB y descarga el CP210X Driver en tu PC.

Paso 3. Conecta el PC mediante un cable de datos USB, extrae el archivo descargado e instala el controlador en tu PC.

Paso 4. Abre el Device Manager en tu PC con Windows y comprueba el número de puerto COM asignado al reComputer Super. Debería aparecer en "Ports (COM & LPT)" como "Silicon Labs CP210x USB to UART Bridge (COMX)", donde X es el número de puerto COM.

Paso 5. Abre la herramienta de puerto serie (aquí usamos la herramienta MobaXterm como ejemplo) y crea una nueva sesión.

Paso 6. Selecciona la herramienta Serial.

Paso 7. Selecciona el puerto serie correspondiente, establece la velocidad en baudios a 115200 y haz clic en "OK".

Paso 8. Inicia sesión en tu reComputer Super con el nombre de usuario y la contraseña.

Cámara USB
Usando una cámara USB a través de los puertos USB 3.2 Type-A, instala y ejecuta guvcview:
sudo apt-get install guvcview
guvcview -d /dev/video0

Ventilador
El reComputer Jetson Robotics J401 está equipado con dos tipos de conectores de ventilador para satisfacer diferentes necesidades de voltaje y refrigeración:
-
1x conector de ventilador de 4 pines (5V PWM): Diseñado para ventiladores silenciosos de bajo voltaje y baja potencia, este conector admite control de velocidad PWM, lo que permite un ajuste inteligente de la velocidad del ventilador según la temperatura del sistema para mejorar la eficiencia energética y reducir el ruido.
-
1x conector de ventilador de 4 pines (12V PWM): Compatible con ventiladores PWM estándar de 12V, también admite un control de velocidad preciso, lo que lo hace ideal para requisitos de refrigeración de alto rendimiento.
Conexión de hardware

Para obtener más información, consulta aquí.
Crea un script para establecer la velocidad del ventilador:
cat test_fanSpeedSet
Pega el siguiente contenido:
#!/bin/bash
sudo systemctl stop nvfancontrol
sleep 2
echo "000000" | sudo -S chmod 777 /sys/devices/platform/pwm-fan/hwmon/hwmon1/pwm1
echo $1 > /sys/devices/platform/pwm-fan/hwmon/hwmon1/pwm1
Nota: Para Jetson Nano 4G, la ruta del ventilador es
/sys/devices/platform/pwm-fan/hwmon/hwmon0/pwm1.
Además, podemos establecer manualmente la velocidad del ventilador usando la herramienta jtop.
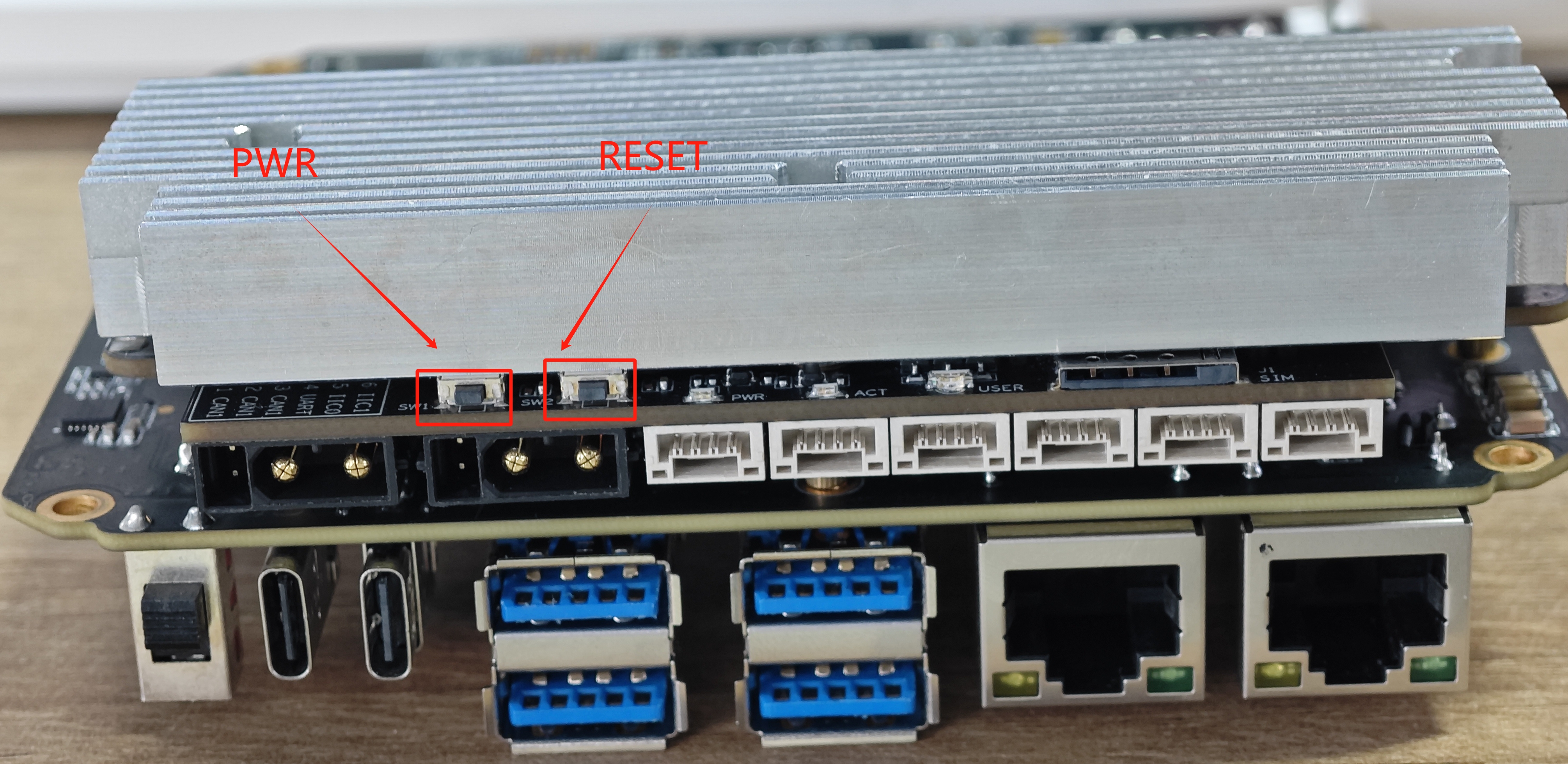
Botón de orificio
La placa portadora Robotics J401 incluye un botón de orificio para la interacción del usuario, que consta de un botón de encendido (PWR) y un botón de reinicio (RESET). Estos botones son esenciales para encender/apagar el dispositivo y realizar reinicios del sistema, respectivamente.
CAN
CAN (Controller Area Network) es un estándar robusto de bus para vehículos que permite que microcontroladores y dispositivos se comuniquen entre sí sin un ordenador host. El Robotics J401 proporciona una interfaz CAN0 integrada en el conector de alimentación XT30 (2+2) para una transmisión conveniente de energía y datos. Además, ofrece 3 interfaces CAN1 a través de dos conectores JST estándar de 4 pines para una conectividad flexible del bus CAN.
Comunicación CAN
En la hoja de datos, puedes encontrar el diagrama de cableado de la interfaz CAN0/CAN1 como se muestra a continuación:

Aquí te mostraremos cómo realizar comunicación de datos usando la interfaz CAN1, utilizando el USB to CAN Analyzer Adapter.
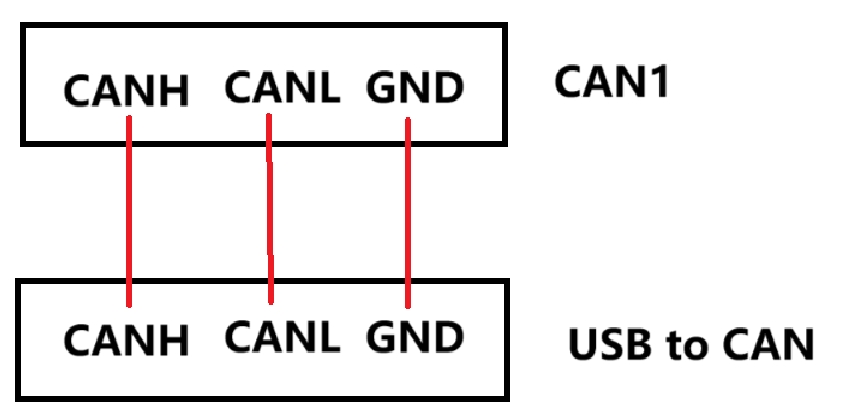
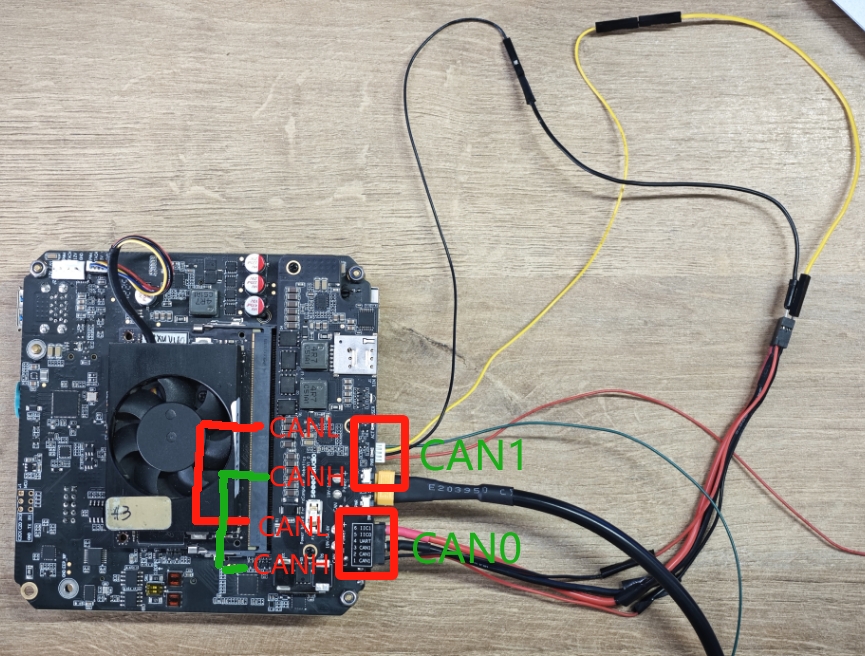
Conexión de hardware
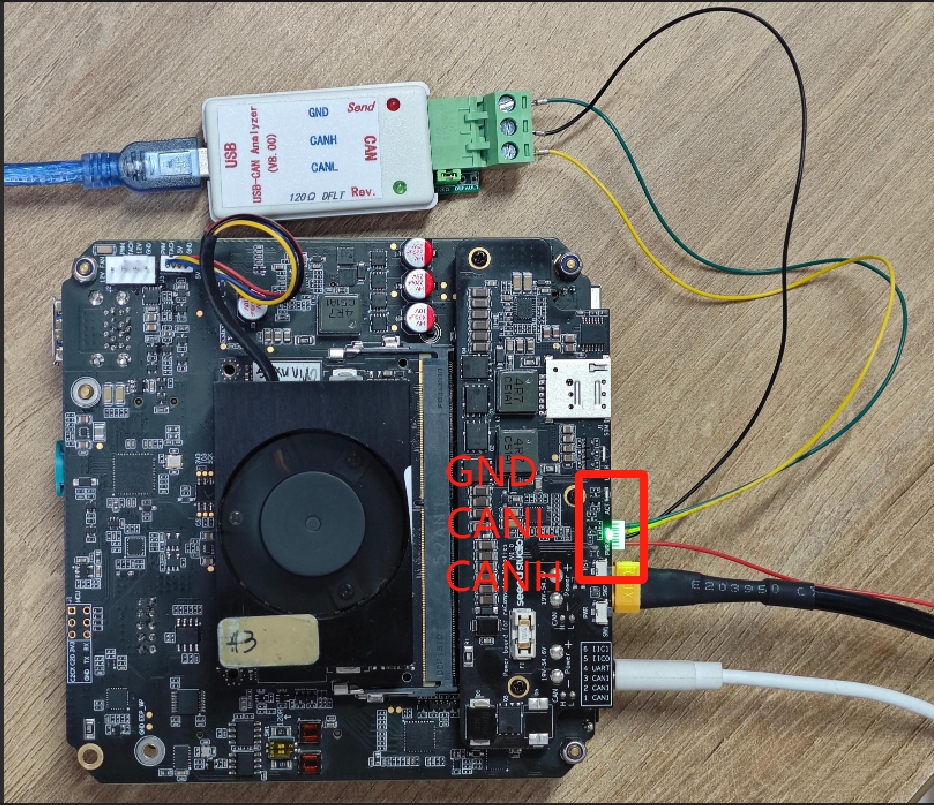
Según el método de conexión que se muestra en la figura siguiente, conecta CANL, CANH y GND de CAN1 a los puertos CANL, CANH y GND correspondientes de la herramienta USB to CAN respectivamente.
En nuestro caso, de acuerdo con el adaptador que utilizamos, hemos descargado e instalado el software que se puede encontrar aquí.
Paso 1. Configura la interfaz CAN1:
#Set the bit rate
sudo ip link set can1 type can bitrate 500000
#Enable CAN1
sudo ip link set can1 up
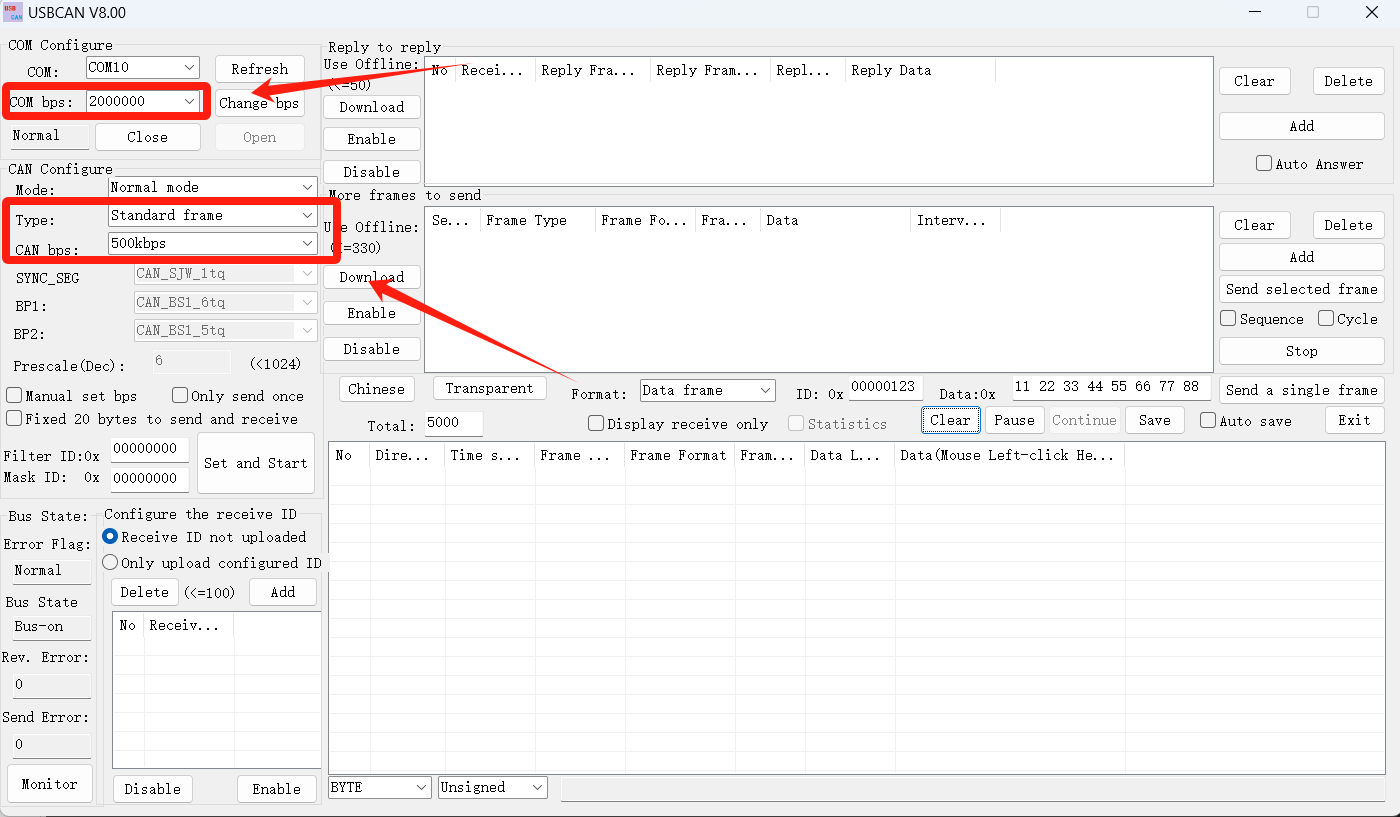
Paso 2. Configura el software de recepción de datos en el PC. Configura los ajustes de comunicación como se muestra en la siguiente imagen.
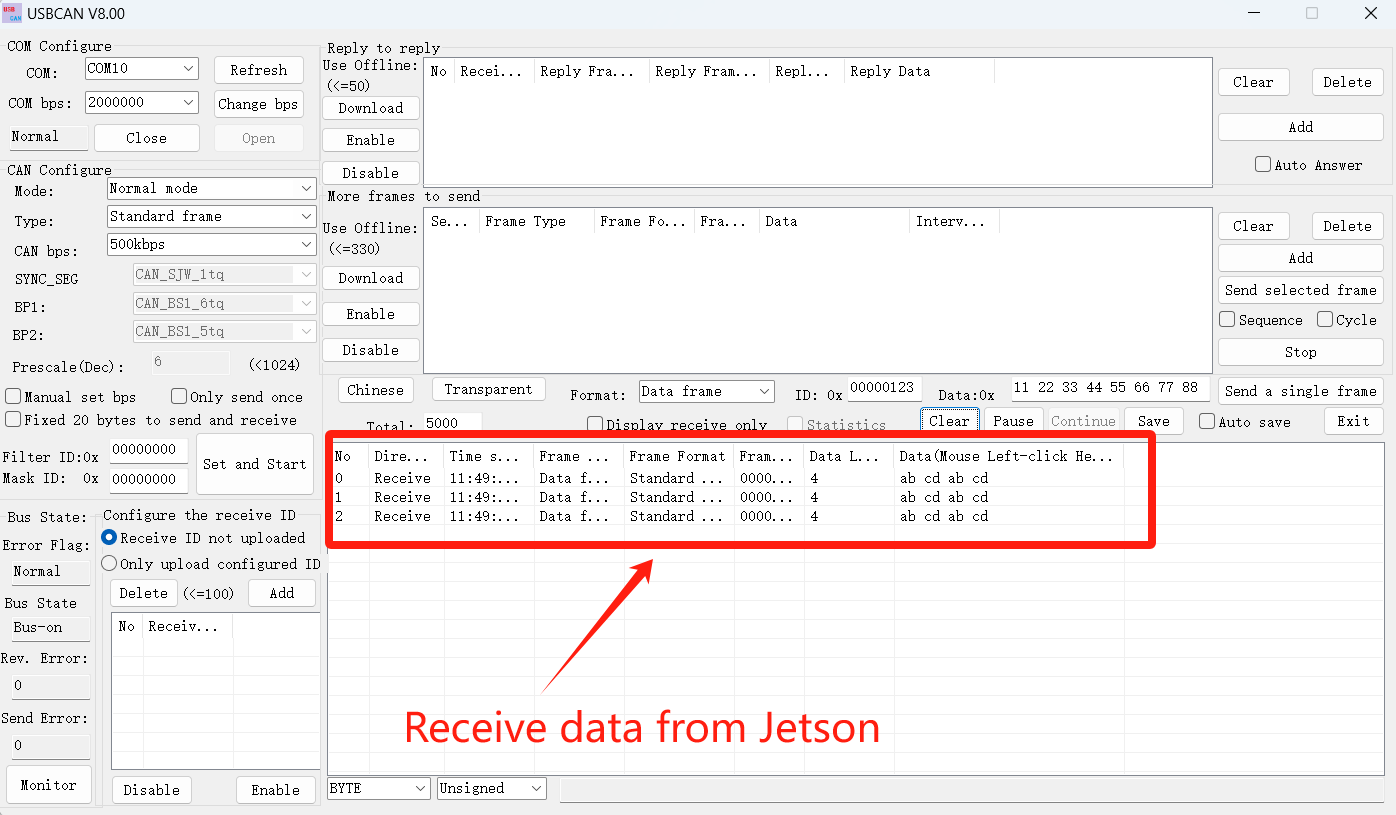
Paso 3. Jetson envía datos al PC:
cansend can1 123#abcdabcd
Paso 3. El PC envía datos al Jetson:
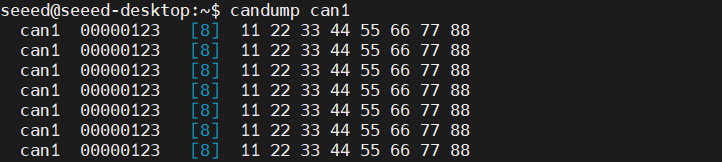
#CAN1 monitors PC data
candump can1
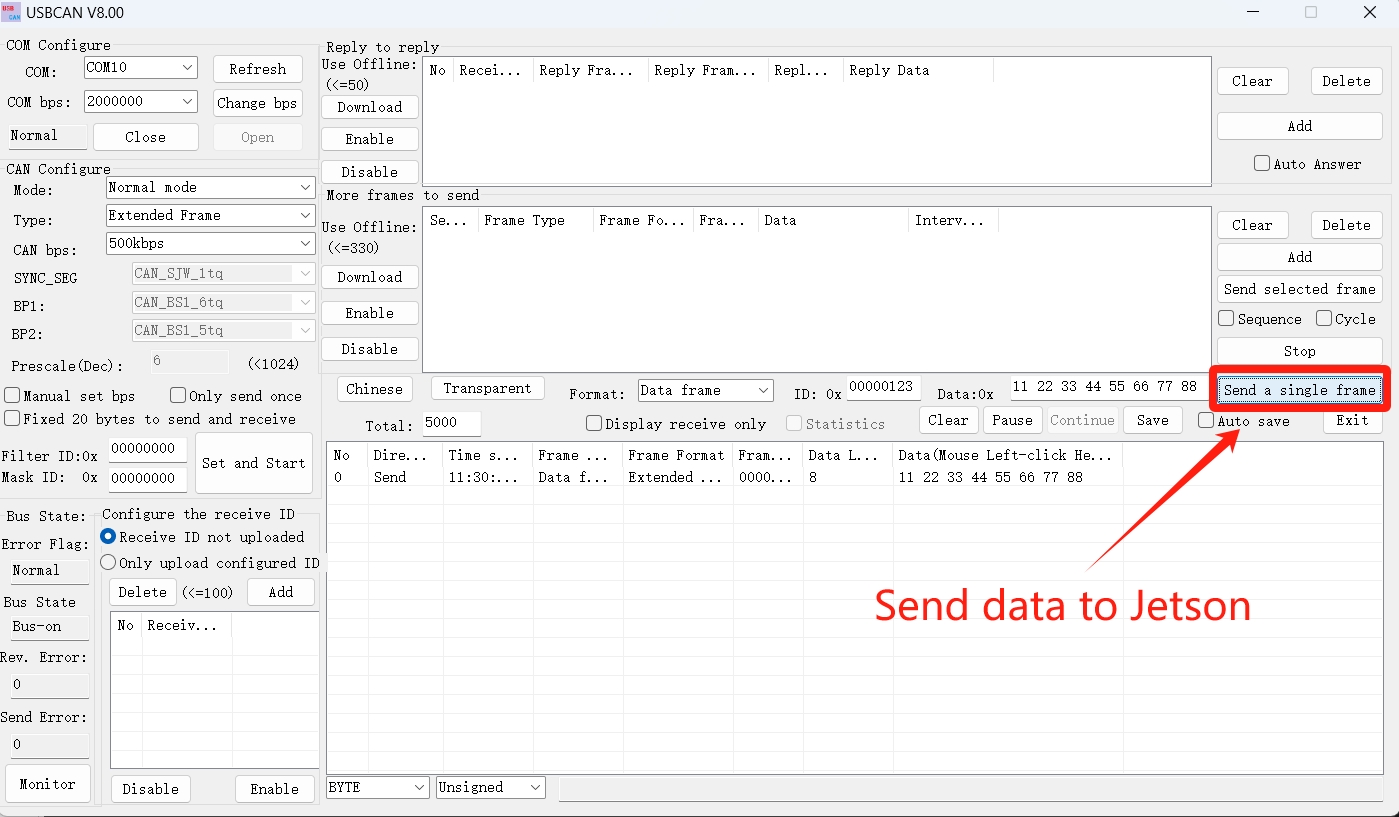
Se puede ver que la terminal Jetson ha recibido los datos enviados por el PC.
Modo CAN FD
Aquí utilizo CAN0 para conectarlo a CAN1 y demostrar cómo varios dispositivos Jetson pueden comunicarse mediante la interfaz CAN.
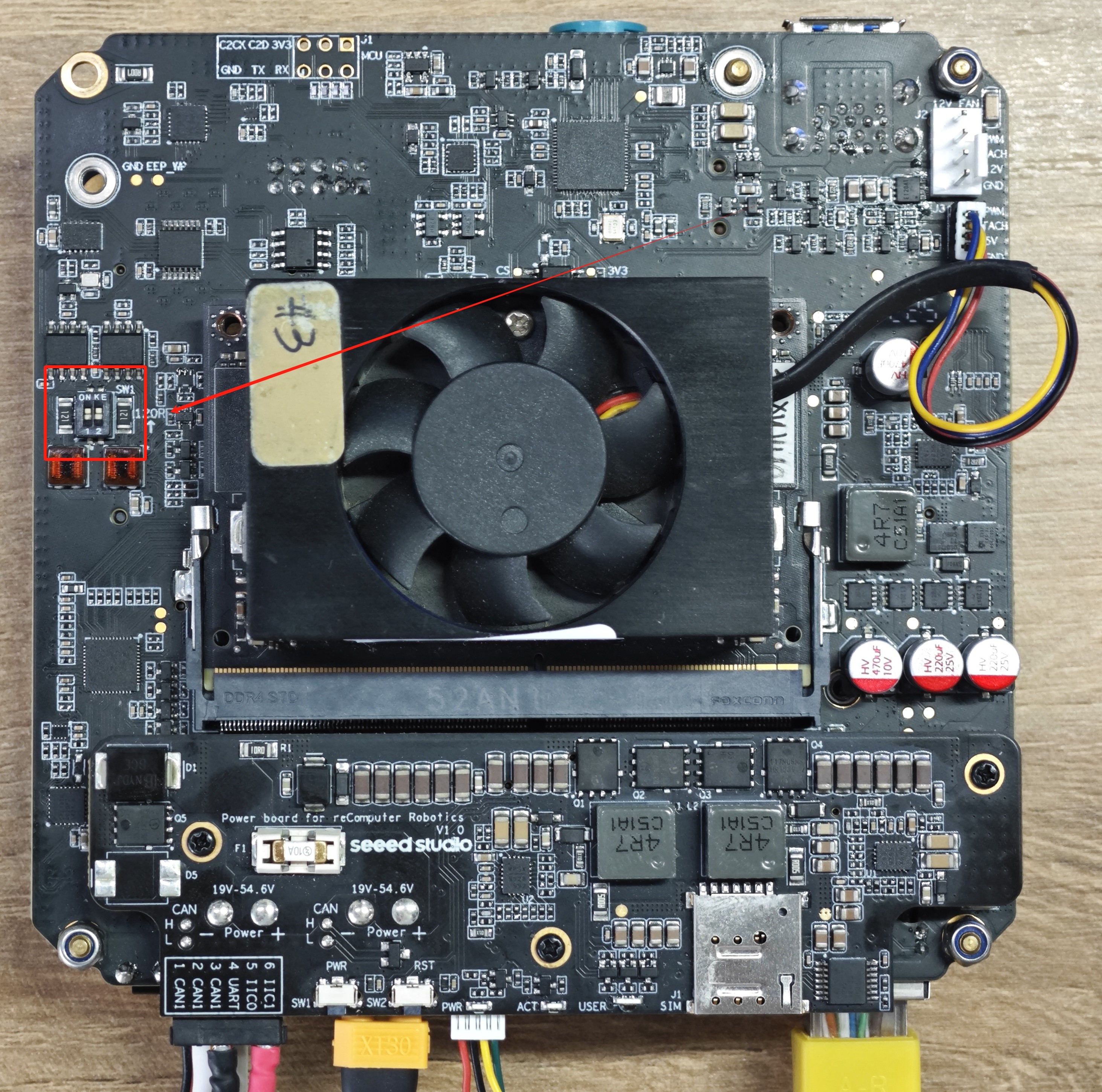
Conexión de hardware
Paso 1. Retira la tapa inferior y ajusta ambas resistencias de terminación de 120Ω a la posición ON.
Paso 2. Configura las interfaces CAN0 y CAN1:
#close the interface
sudo ip link set can0 down
sudo ip link set can1 down
#Set to FD mode
sudo ip link set can0 type can bitrate 500000 dbitrate 2000000 fd on
sudo ip link set can1 type can bitrate 500000 dbitrate 2000000 fd on
#open the interface
sudo ip link set can0 up
sudo ip link set can1 up
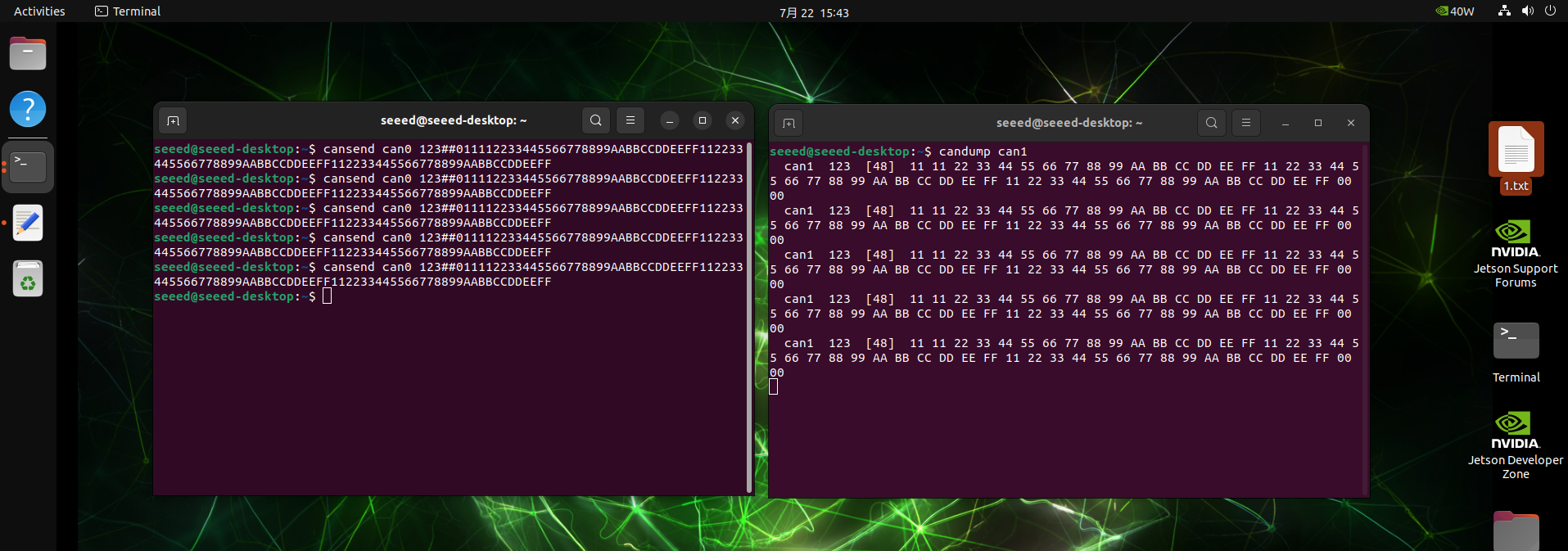
Paso 3. Abre una nueva terminal para escuchar CAN1 y, a través de CAN0, envía datos a CAN1:
#open a new terminal and run
candump can1
#another terminal sends data
cansend can0 123##011112233445566778899AABBCCDDEEFF112233445566778899AABBCCDDEEFF112233445566778899AABBCCDDEEFF
123is ID##Indicates CAN FD frame- The following is 64 bytes of data (a total of 128 hexadecimal characters)
UART
El Robotics J401 proporciona un conector JST estándar de 4 pines para comunicación serie UART.
Conexión de hardware
Para la comunicación UART, sigue el siguiente cableado. Aquí usamos la herramienta USB to TTL como ejemplo.

Instrucciones de uso
Paso 1. Abre la terminal en el dispositivo Jetson y ejecuta el siguiente comando para habilitar la interfaz UART:
gpioset --mode=time --sec=100 2 5=0
Paso 2. Conecta la herramienta USB to TTL al puerto UART del Robotics J401 y al PC.
Paso 3. Abre la herramienta de puerto serie en el PC (aquí usamos la herramienta xcom como ejemplo) y establece la velocidad en baudios a 115200.
Paso 4. Crea un script sencillo en Python para la comunicación serie:
import serial
import time
ser = serial.Serial('/dev/ttyTHS1', 115200, timeout=1)
ser.write(b'Hello Jetson!\n')
while True:
if ser.in_waiting:
data = ser.readline()
print("get:", data.decode('utf-8').strip())
time.sleep(0.1)
ser.close()
Paso 5. Ejecuta el script de Python en el dispositivo Jetson:
python3 uart_test.py
Paso 6. Ahora puedes ver la salida en el PC y también puedes enviar datos desde el PC al dispositivo Jetson:


I2C
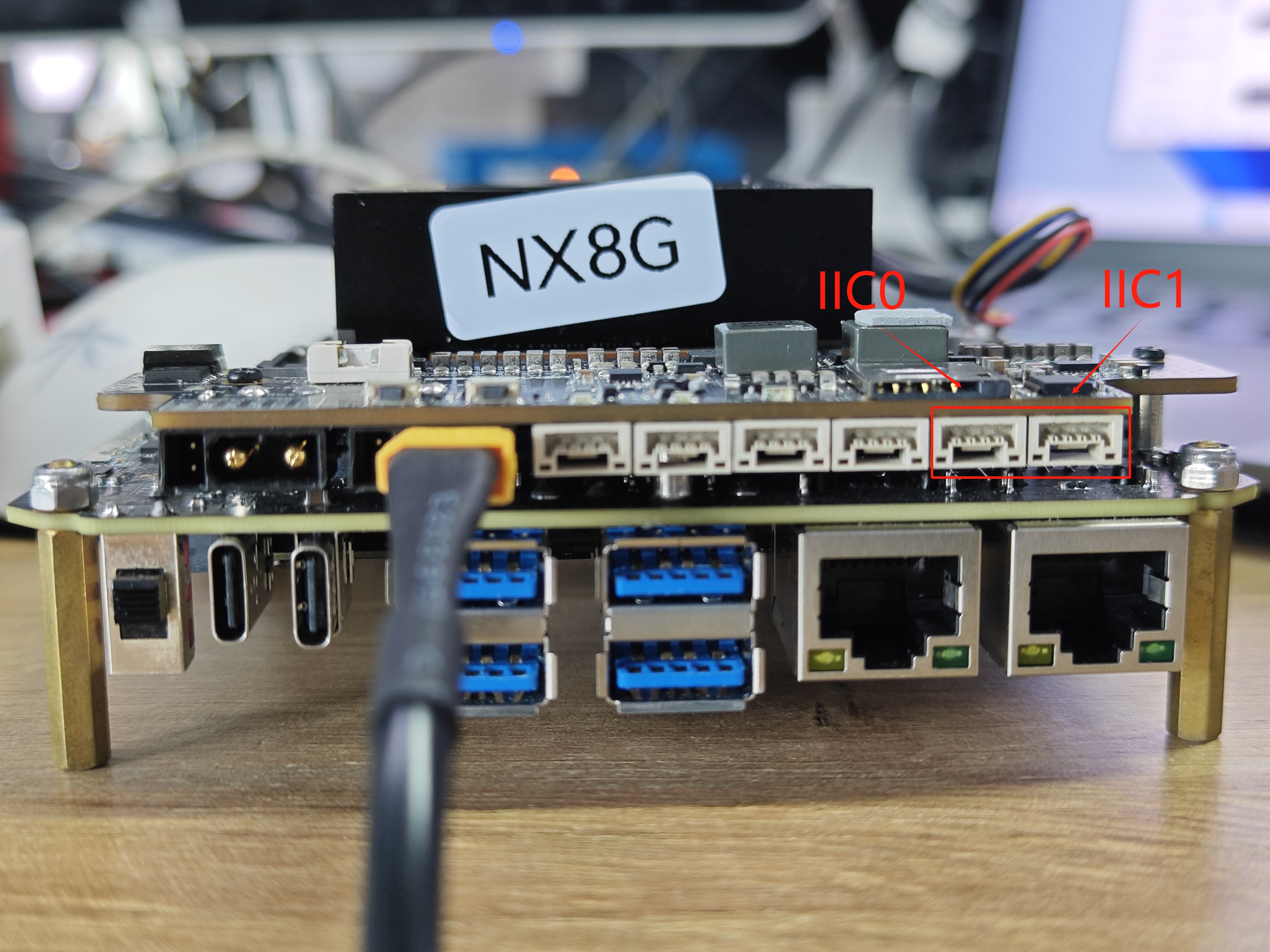
Robotics J401 proporciona dos interfaces I2C (IIC0 e IIC1) mediante conectores estándar JST de 4 pines. Permite una fácil conexión de sensores y periféricos para la expansión del sistema.
Conexión de hardware
El Robotics J401 cuenta con dos interfaces IIC GH-1.25 de 4 pines, IIC0 e IIC1.
En la datasheet, puedes encontrar el diagrama de cableado para la interfaz IIC0/IIC1 GH-1.25 de 4 pines como se muestra a continuación:

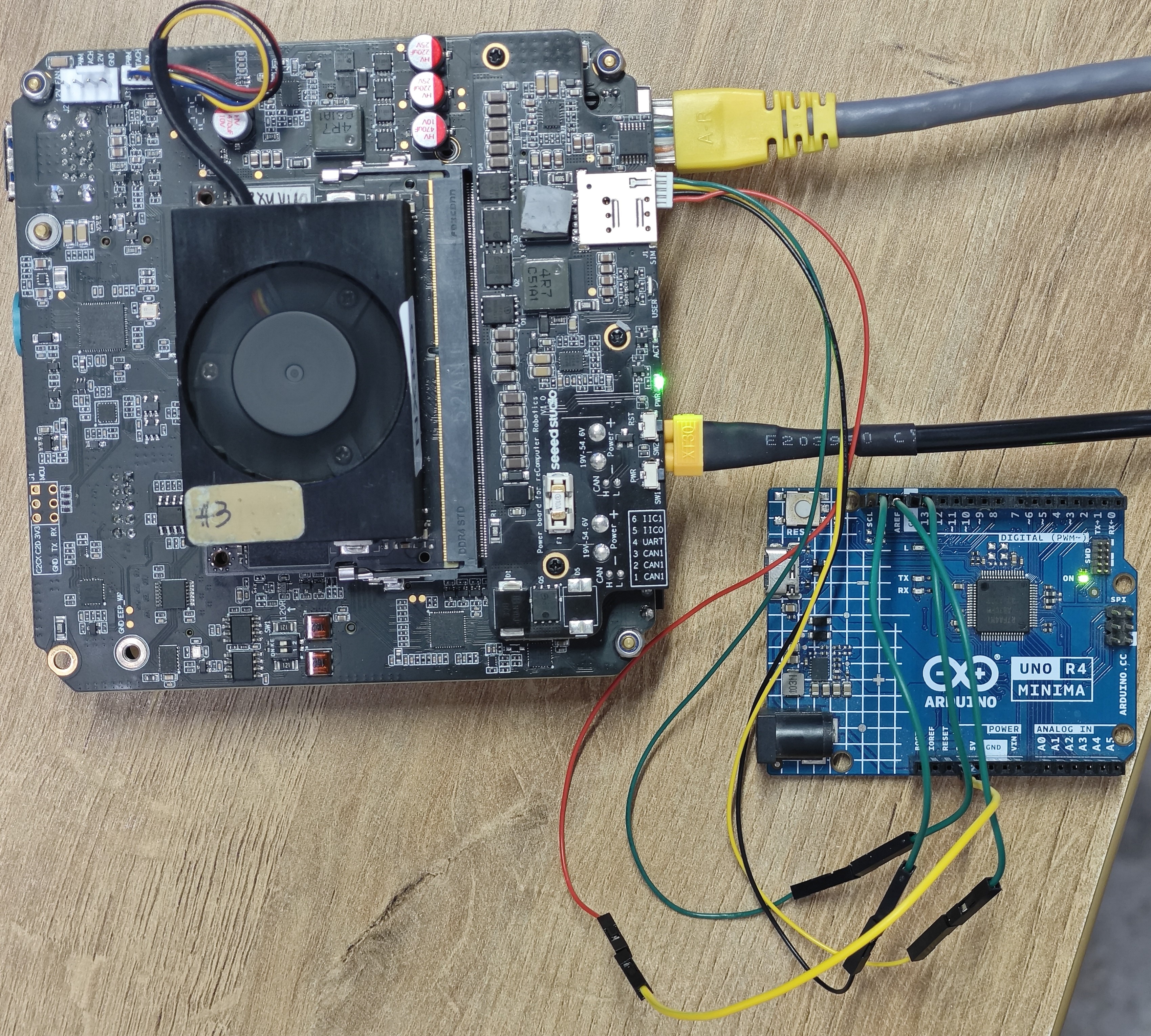
Selecciona un dispositivo de interfaz IIC para la prueba; la elección depende de ti. Aquí utilizamos un Arduino-Uno-Rev4-Minima para probar I2C0/I2C1.
El proceso de prueba aquí consiste en escanear las direcciones de los dispositivos conectados externamente en IIC0/IIC1.
Conecta los dispositivos (IIC0/IIC1 ↔ Device) de acuerdo con las siguientes conexiones:
-
Power → Power
-
SDA → SDA
-
SCL → SCL
-
Ground → Ground
Instrucciones de uso
Paso 1. Descarga el Arduino IDE para cargar el código.
Paso 2. Selecciona el tipo de placa de desarrollo.
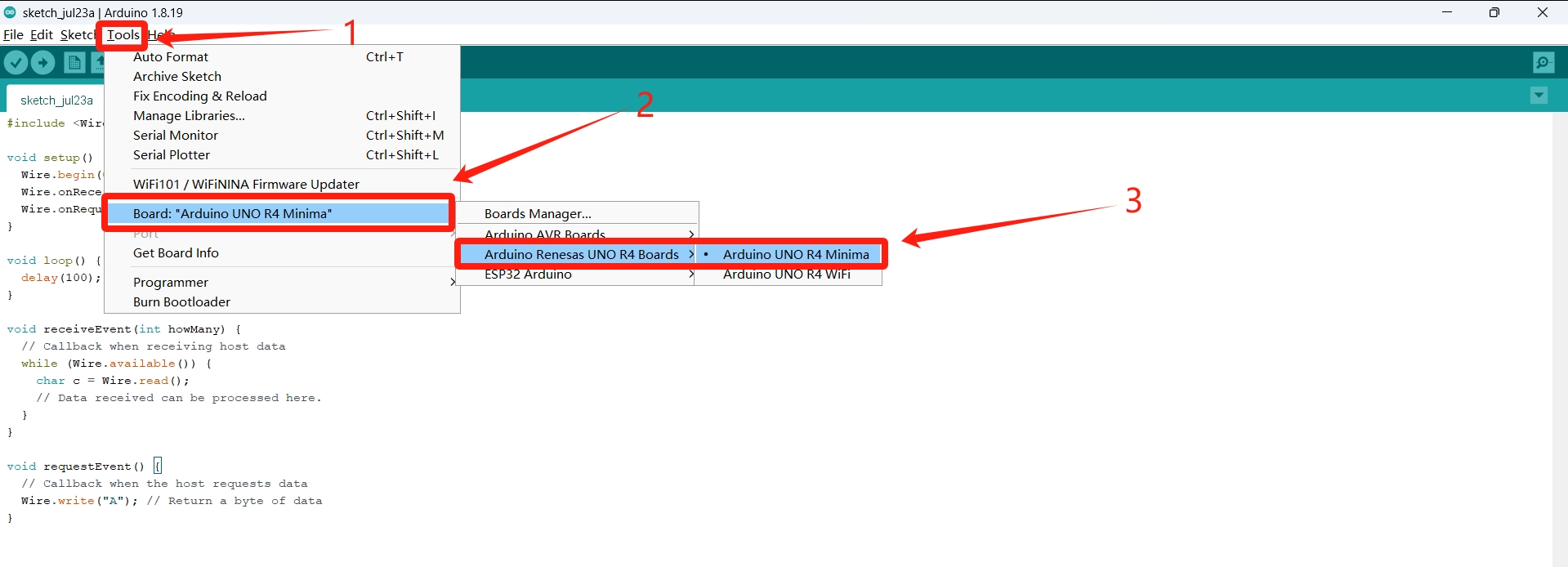
Paso 3. Reinicia el IDE y carga tu código.
#code example
#include <Wire.h>
void setup() {
Wire.begin(0x08); // Set the I2C slave address to 0x08
Wire.onReceive(receiveEvent);
Wire.onRequest(requestEvent);
}
void loop() {
delay(100);
}
void receiveEvent(int howMany) {
// Callback when receiving host data
while (Wire.available()) {
char c = Wire.read();
// Data received can be processed here.
}
}
void requestEvent() {
// Callback when the host requests data
Wire.write("A"); // Return a byte of data
}
Paso 4. Instala en Jetson las herramientas para la prueba de IIC.
sudo apt update
sudo apt-get install i2c-tools
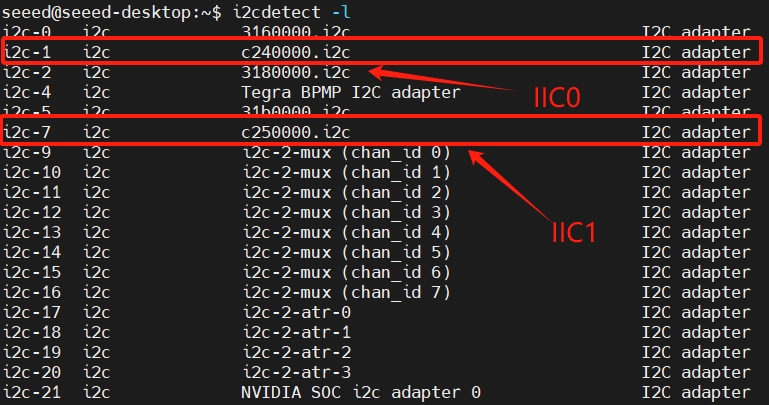
Paso 5. Ejecuta el siguiente comando en la terminal para ver los nombres mapeados en el bus IIC:
i2cdetect -l
Paso 6. Ejecuta los siguientes comandos para escanear en IIC0:
sudo i2cdetect -y -r 1
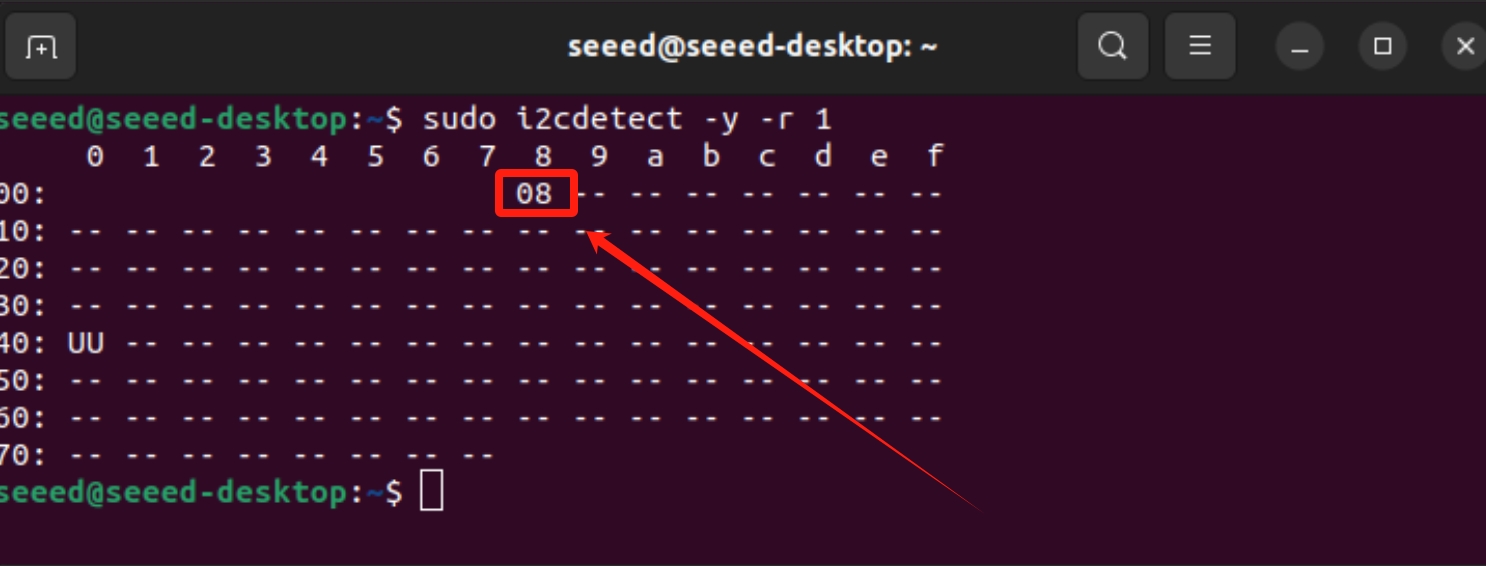
Podemos ver que el dispositivo conectado a IIC0 está configurado en la dirección 0x08.
Puerto de expansión
La placa carrier Robotics j401 incluye un Camera Expansion Header para la placa de expansión GMSL. Puede conectar y operar simultáneamente cuatro cámaras GMSL al mismo tiempo.
Conexión de hardware
A continuación se muestra la ranura de conexión de la placa de expansión de cámara GMSL de la placa carrier Robotics j401 (es necesario preparar una placa de expansión con antelación):

Los siguientes son los modelos de cámaras GMSL que ya hemos soportado:
- SG3S-ISX031C-GMSL2F
- SG2-AR0233C-5200-G2A
- SG2-IMX390C-5200-G2A
- SG8S-AR0820C-5300-G2A
- Orbbec Gemini 335Lg
Instrucciones de uso
Antes de habilitar la funcionalidad GMSL, asegúrate de haber instalado una versión de JetPack con el controlador para la placa de expansión GMSL.
Configurar el archivo Jetson IO
sudo /opt/nvidia/jetson-io/jetson-io.py
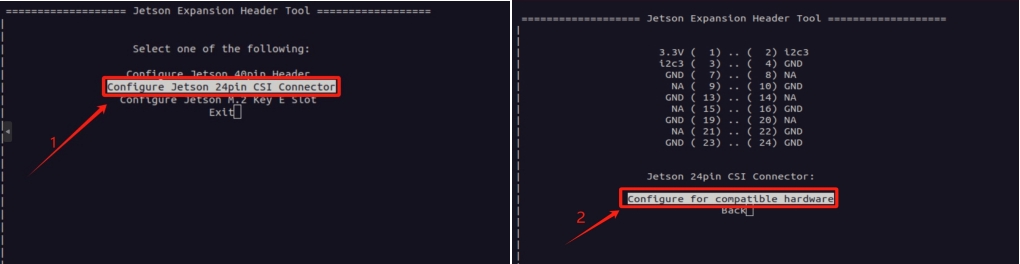
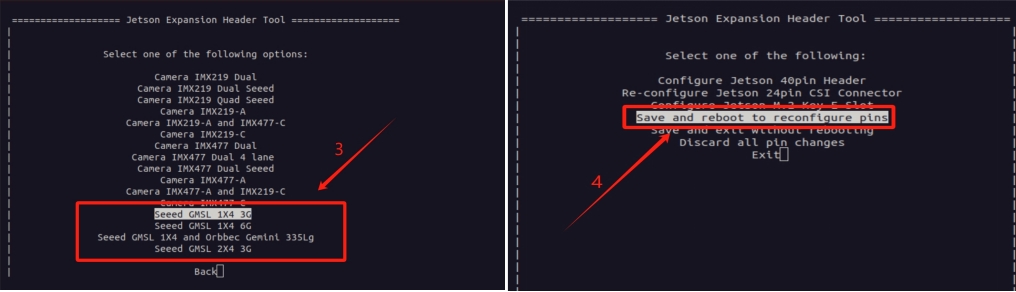
Hay tres archivos overlay en total, a saber, Seeed GMSL 1X4 3G, Seeed GMSL 1X4 6G, Seeed GMSL 1X4 y Orbbec Gemini 335Lg. Estos corresponden respectivamente a la cámara 3G de SG3S, la cámara 6G de SG2 y SG8S, y la cámara de Orbbec. Como se muestra en la Figura 3, configura el archivo io de acuerdo con el modelo de tu cámara.
Paso 2. Instala las herramientas de configuración de la interfaz de vídeo.
sudo apt update
sudo apt install v4l-utils
Usar la cámara Gemini 335Lg
#Download the Orbbec Gemini 335Lg visualization tool
wget https://github.com/orbbec/OrbbecSDK_v2/releases/download/v2.4.8/OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64.zip
#unzip and run the UI tool
unzip OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64.zip
cd OrbbecViewer_v2.4.8_202507031357_a1355db_linux_aarch64
./OrbbecViewer
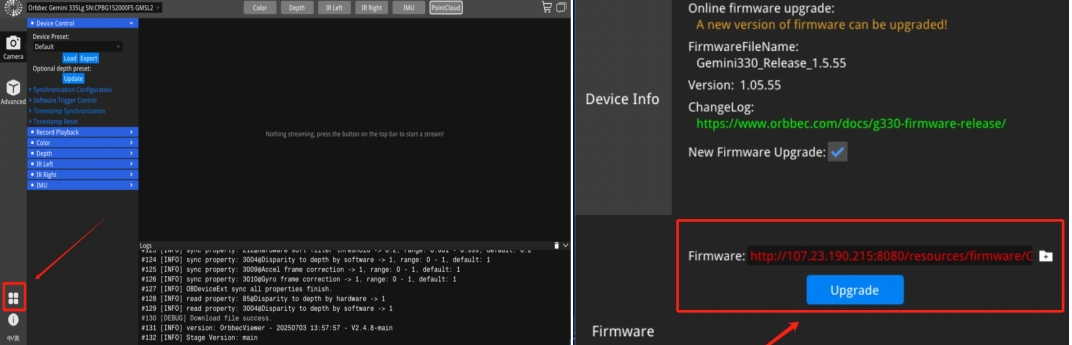
La primera vez que la enciendas, puede que necesites actualizar el firmware.
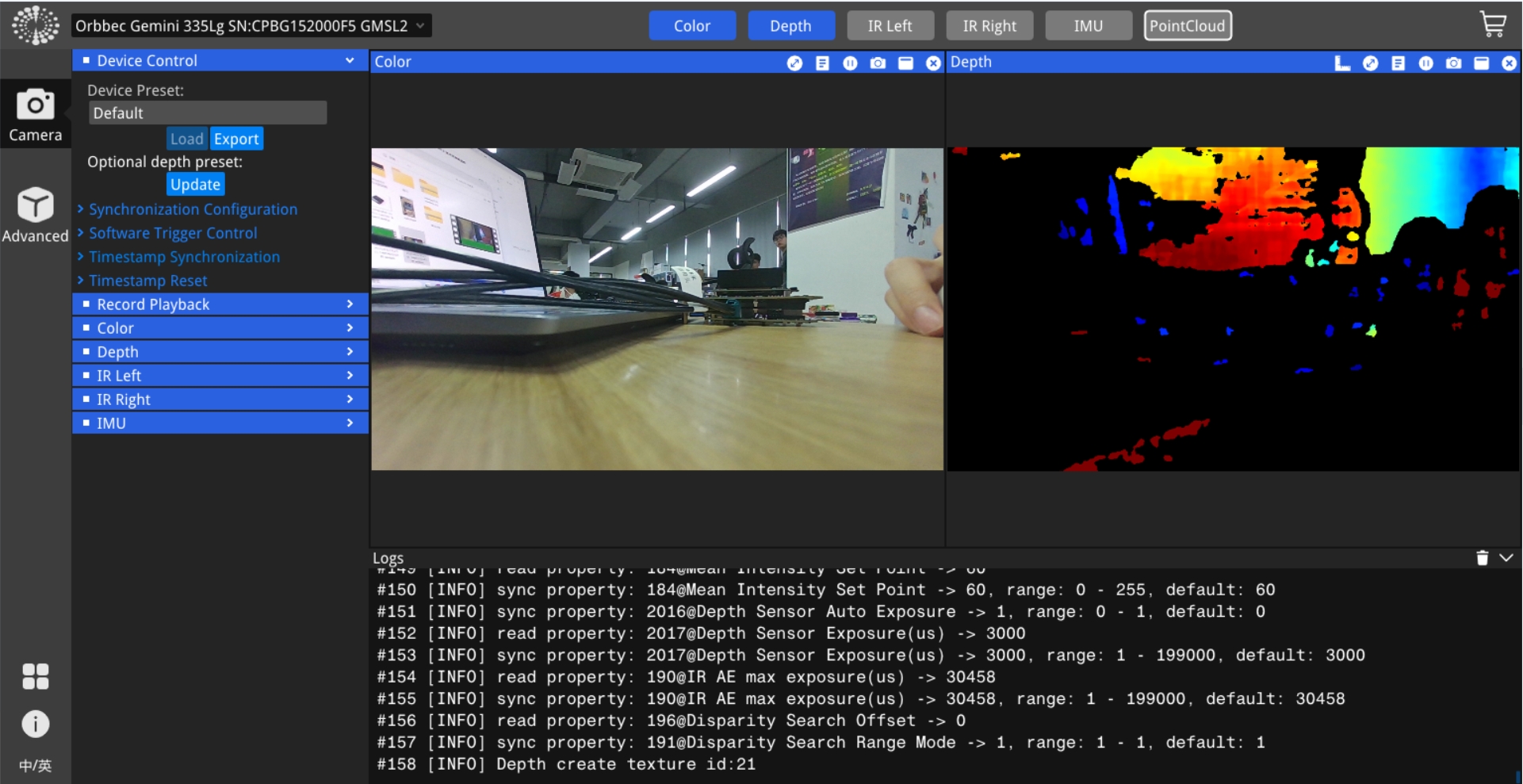
Al abrir el flujo de datos, puedes ver el vídeo de la cámara.
Usar las cámaras de la Serie SGxxx
Paso 1. Configura el modo de sincronización de fotogramas (¡no está habilitado por defecto!).
Aquí mostramos cómo configurar cámaras de diferentes modelos y resoluciones.
#enables frame synchronization
v4l2-ctl -d /dev/video0 --set-ctrl=trig_mode=1
#Set the frame rate of the camera
v4l2-ctl -V --set-fmt-video=width=1920,height=1536 -c sensor_mode=0 --stream-mmap -d /dev/video0
#Set the camera format
v4l2-ctl -V --set-fmt-video=width=1920,height=1536 -c sensor_mode=0 -d /dev/video0
trig_mode = 1 habilita la sincronización de fotogramas, mientras que trig_mode = 0 deshabilita la sincronización de fotogramas. La configuración predeterminada es deshabilitar la sincronización de fotogramas.
--set-fmt-video sigue la resolución que se selecciona en función de la cámara conectada. Actualmente, hay tres opciones de sensor_mode, cada una correspondiente a una resolución diferente.
- sensor_mode=0 -------> YUYV8_1X16/1920x1536
- sensor_mode=1 -------> YUYV8_1X16/1920x1080
- sensor_mode=2 -------> YUYV8_1X16/3840x2160
Paso 2. Inicia la cámara.
gst-launch-1.0 \
v4l2src device=/dev/video0 ! \
video/x-raw,format=YUY2,width=1920,height=1080,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
gst-launch-1.0 \
v4l2src device=/dev/video1 ! \
video/x-raw,format=YUY2,width=1920,height=1080,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
gst-launch-1.0 \
v4l2src device=/dev/video2 ! \
video/x-raw,format=YUY2,width=1536,height=1080,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
gst-launch-1.0 \
v4l2src device=/dev/video3 ! \
video/x-raw,format=YUY2,width=3840,height=2160,framerate=30/1 ! \
videoconvert ! \
videoscale ! \
xvimagesink
Pantalla
El reComputer Jetson Robotics J401 está equipado con un DP1.4 (incluido en el Type-C Host) para salida de pantalla de alta resolución.
Recursos
- Esquemático de la Carrier Board reComputer Robotics J401
- Datasheet de la Carrier Board reComputer Robotics J401
- Archivo 3D de reComputer Robotics
- Documento mecánico - reComputer Robotics PCBA
- Catálogo de productos Seeed NVIDIA Jetson
- Comparación de Nvidia Jetson
- Casos de éxito de Seeed Nvidia Jetson
- Seeed Jetson One Pager
Soporte técnico y debate sobre el producto
Gracias por elegir nuestros productos. Estamos aquí para ofrecerte diferentes tipos de soporte y garantizar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para adaptarnos a diferentes preferencias y necesidades.