Canal de voz ROS2 en reSpeaker
Introducción

Este proyecto convierte tu voz en control de TurtleSim usando una matriz de micrófonos reSpeaker y ROS2. Di “Hey Jarvis” seguido de un comando, y Jarvis graba el audio, lo transcribe con Groq Whisper, interpreta la intención con Groq LLaMA y responde con Groq Orpheus TTS. Es compatible con movimiento hacia adelante/atrás, giros angulares, orientación basada en DoA y comandos de parada instantánea. El sistema integra detección de palabra de activación, captura de audio, tópicos de ROS2 y publicación de comandos al simulador en una única canalización fluida. Está diseñado para una configuración rápida con Ubuntu y ROS2 Humble, lo que facilita la ejecución de experimentos de robots controlados por voz.
| reSpeaker Flex XVF3800 Circular | reSpeaker XVF3800 | |
|---|---|---|
 | O |  |
Parte 1 — Instalar ROS2 Humble
Omite esta parte si ROS2 Humble ya está instalado en tu máquina. Comprueba ejecutando:
ros2 --version
1.1 Configurar el repositorio apt de ROS2
# Make sure your system is up to date
sudo apt update && sudo apt upgrade -y
# Install required tools
sudo apt install -y software-properties-common curl
# Add the ROS2 GPG key
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key \
-o /usr/share/keyrings/ros-archive-keyring.gpg
# Add the ROS2 repository to your sources
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] \
http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" \
| sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
1.2 Instalar ROS2 Humble Desktop
sudo apt update
sudo apt install -y ros-humble-desktop
La variante
desktopincluye TurtleSim, RViz y todas las herramientas que necesitas. Esta descarga es de alrededor de 1 GB — puede tardar unos minutos.
1.3 Instalar herramientas de compilación
sudo apt install -y python3-colcon-common-extensions python3-rosdep
1.4 Cargar ROS2 automáticamente en cada terminal
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc
1.5 Verificar la instalación
ros2 --version
# Expected output: ros2 cli version 0.18.x (or similar)
Luego prueba TurtleSim para confirmar que todo funciona:
# Terminal 1
ros2 run turtlesim turtlesim_node
# Terminal 2
ros2 run turtlesim turtle_teleop_key
Deberías ver una ventana con una tortuga que puedes manejar con las teclas de flecha. Pulsa Ctrl+C en ambos terminales cuando termines.
Parte 2 — Crear una regla udev para el dispositivo
Crea una nueva regla udev para asegurar los permisos adecuados para la reSpeaker USB Mic Array:
sudo nano /etc/udev/rules.d/50-respeaker.rules
Añade las siguientes líneas al archivo:
# ReSpeaker USB Mic Array
SUBSYSTEM=="usb", ATTR{idVendor}=="2886", ATTR{idProduct}=="0018", MODE="0666", GROUP="plugdev"
SUBSYSTEM=="usb", ATTR{idVendor}=="2886", ATTR{idProduct}=="001a", MODE="0666", GROUP="plugdev"
Recargar las reglas de udev y reiniciar el servicio
Recarga las reglas de udev y reinicia el servicio para que los cambios surtan efecto:
sudo udevadm control --reload-rules
sudo udevadm trigger
sudo service udev restart
Desconecta y vuelve a conectar tu reSpeaker USB Mic Array para aplicar las nuevas reglas.
Parte 3 — Obtener una clave de API de Groq
Este proyecto utiliza la API en la nube gratuita de Groq para:
- Whisper — conversión de voz a texto
- LLaMA 3 — comprensión de tus comandos
- Orpheus — respuesta de voz de Jarvis
- Ve a console.groq.com y crea una cuenta gratuita
- Haz clic en API Keys en la barra lateral izquierda
- Haz clic en Create API Key, ponle un nombre (por ejemplo, "jarvis") y cópiala
- Guárdala en un lugar seguro — la pegarás en
config.enven breve
El nivel gratuito de Groq es lo suficientemente generoso para desarrollo y pruebas. No se requiere tarjeta de crédito para comenzar.
Parte 4 — Instalar dependencias de Python (a nivel del sistema)
Importante: NO uses un entorno virtual para este proyecto. ROS2 utiliza el Python del sistema y no puede ver los paquetes instalados dentro de un venv. Instalamos todo con
--break-system-packagespara ponerlos a disposición de los nodos de ROS2.
pip install \
groq \
openwakeword \
pyaudio \
numpy<2 \
python-dotenv \
pyusb \
Descargar el modelo de palabra de activación "Hey Jarvis"
python3 -c "import openwakeword; openwakeword.utils.download_models()"
Esto descarga modelos preentrenados en ~/.openwakeword/. Tarda unos 30 segundos.
Instalar PortAudio (requerido por PyAudio)
sudo apt install -y portaudio19-dev python3-pyaudio
Parte 5 — Crear tu espacio de trabajo de ROS2
Sáltate a la Parte 6 si ya tienes un espacio de trabajo
~/ros2_ws.
# Create the workspace directory
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws
# Build the empty workspace to set it up
colcon build
# Source it and add to .bashrc so it loads automatically
echo "source ~/ros2_ws/install/setup.bash" >> ~/.bashrc
source ~/.bashrc
Parte 6 — Clonar y configurar el proyecto
6.1 Clonar el repositorio
Si estás usando Flex
cd ~/ros2_ws/src
git clone https://github.com/KasunThushara/ros_voice_controller_flex.git my_robot_controller
Si estás usando XVF3800
cd ~/ros2_ws/src
git clone https://github.com/KasunThushara/ros_voice_controller.git my_robot_controller
Tu espacio de trabajo ahora debería verse así:
~/ros2_ws/
└── src/
└── my_robot_controller/
├── my_robot_controller/
│ ├── voice_node.py
│ ├── rotate_doa.py
│ ├── wakeword.py
│ └── ...
├── launch/
│ └── jarvis.launch.py
└── config.env.example
6.2 Crear tu archivo de configuración
cd ~/ros2_ws/src/my_robot_controller
cp config.env.example config.env
nano config.env
Abre el archivo y rellena tus valores:
# ── Groq API (required) ────────────────────────────────
GROQ_API_KEY=gsk_xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx ← paste your key here
# ── Microphone ─────────────────────────────────────────
MIC_INDEX=1 ← find the correct number in Step 6.3 below
WAKEWORD_THRESHOLD=0.5
WAKEWORD_COOLDOWN=2
# ── Recording ──────────────────────────────────────────
RECORDING_SECONDS=4
SAMPLE_RATE=16000
# ── Models ─────────────────────────────────────────────
WAKEWORD_MODEL=hey jarvis
LLM_MODEL=llama-3.1-8b-instant
STT_MODEL=whisper-large-v3-turbo
TTS_MODEL=canopylabs/orpheus-v1-english
TTS_VOICE=autumn
Guarda con Ctrl+O, Enter, Ctrl+X.
6.3 Encontrar tu MIC_INDEX correcto
Ejecuta este asistente para listar todos los dispositivos de entrada de audio:
python3 -c "
import pyaudio
p = pyaudio.PyAudio()
print('\nAvailable INPUT devices:\n')
for i in range(p.get_device_count()):
d = p.get_device_info_by_index(i)
if d['maxInputChannels'] > 0:
print(f' [{i}] {d[\"name\"]}')
print(f' channels={int(d[\"maxInputChannels\"])} rate={int(d[\"defaultSampleRate\"])}Hz')
p.terminate()
"
Salida de ejemplo:
Available INPUT devices:
[0] HDA Intel PCH: ALC897 Analog
channels=2 rate=44100Hz
[1] reSpeaker Flex XVF3800
channels=6 rate=16000Hz ← this is the one you want
[2] USB PnP Sound Device
channels=2 rate=16000Hz
Encuentra la línea que dice reSpeaker Flex o reSpeaker Flex XVF3800. Anota el número entre corchetes — ese es tu MIC_INDEX. Actualiza config.env con ese número.
Parte 7 — Compilar el paquete
cd ~/ros2_ws
colcon build --packages-select my_robot_controller
source ~/.bashrc
Salida esperada:
Starting >>> my_robot_controller
Finished <<< my_robot_controller [3.2s]
Summary: 1 package finished [3.5s]
Debes ejecutar
colcon buildysource ~/.bashrccada vez que cambies cualquier archivo de Python.
Parte 8 — Ejecutar el proyecto
ros2 launch my_robot_controller jarvis.launch.py
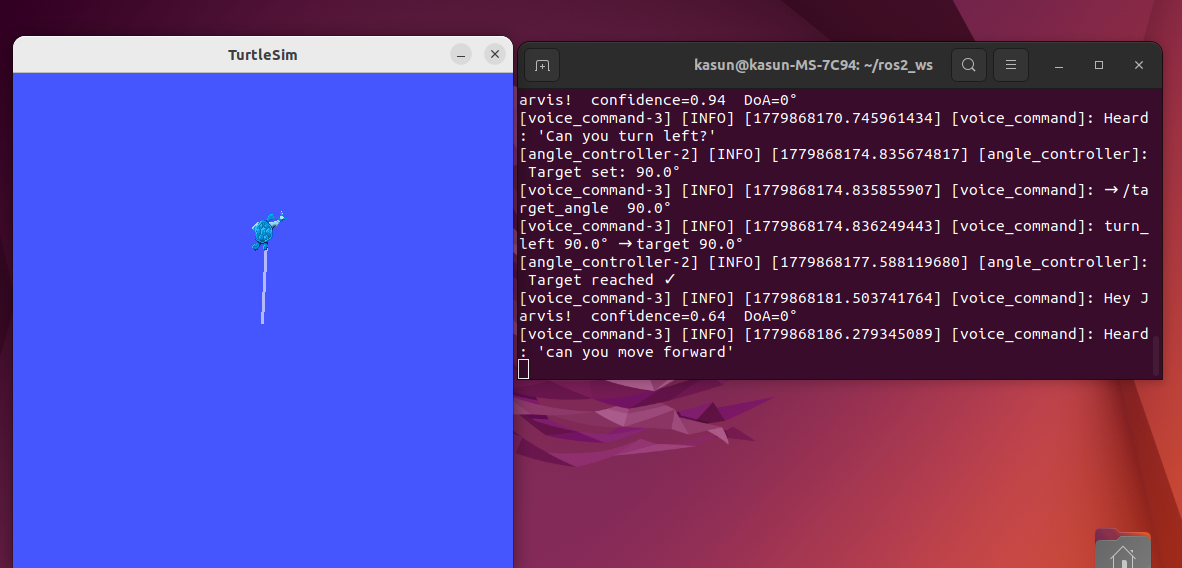
Deberías ver que se inician tres procesos:
[turtlesim_node-1] [INFO] Spawning turtle [turtle1] at x=[5.54], y=[5.54]
[angle_controller-2] [INFO] AngleController ready — listening on /target_angle
[voice_command-3] [INFO] reSpeaker Flex XVF3800 found — DoA ready
[voice_command-3] [WakeWord] Listening on device 1 (6ch → mono) for 'hey jarvis' ...
[voice_command-3] [INFO] Jarvis is listening ...
Se abrirá una ventana que muestra la tortuga. Ahora habla:
"Hey Jarvis, move forward"
Jarvis responderá "Moving forward!" y la tortuga se moverá.
Referencia de comandos de voz
| Di esto | Qué sucede |
|---|---|
"Hey Jarvis, move forward" | La tortuga se mueve 1 paso hacia adelante |
"Hey Jarvis, move backward" | La tortuga se mueve 1 paso hacia atrás |
"Hey Jarvis, turn left" | La tortuga gira 90° a la izquierda |
"Hey Jarvis, turn left 45" | La tortuga gira 45° a la izquierda |
"Hey Jarvis, turn right" | La tortuga gira 90° a la derecha |
"Hey Jarvis, turn right 30 degrees" | La tortuga gira 30° a la derecha |
"Hey Jarvis, turn to my direction" | La tortuga se orienta hacia tu voz (DoA) |
"Hey Jarvis, face me" | Igual que arriba |
"Hey Jarvis, turn to 90" | La tortuga gira al ángulo absoluto de 90° |
"Hey Jarvis, face 180 degrees" | La tortuga gira al ángulo absoluto de 180° |
"Hey Jarvis, spin around" | La tortuga hace un giro completo de 360° |
"Hey Jarvis, do a 360" | Igual que arriba |
"Hey Jarvis, stop" | La tortuga se detiene inmediatamente |
Estructura de archivos del proyecto
my_robot_controller/
│
├── my_robot_controller/ # Python package (ROS2 nodes)
│ ├── __init__.py
│ ├── voice_node.py # Main voice pipeline node
│ ├── rotate_doa.py # PID angle controller node
│ ├── wakeword.py # Wake word detection (openwakeword)
│ ├── audio_recorder.py # Mic recording after wake word
│ ├── stt.py # Speech-to-text (Groq Whisper)
│ ├── llm.py # Intent parsing (Groq LLaMA)
│ ├── tts.py # Text-to-speech (Groq Orpheus)
│ └── config.py # Loads settings from config.env
│
├── launch/
│ └── jarvis.launch.py # Starts all 3 nodes together
│
├── config.env # Your secrets (not in git)
├── config.env.example # Template — copy to config.env
├── package.xml
└── setup.py
Cómo se conectan los nodos
reSpeaker Flex (USB)
│
├── [voice_command node]
│ openwakeword → Groq Whisper → Groq LLaMA → Groq Orpheus
│ │ │
│ │ publishes /target_angle (Float32) │ speaks reply
│ │ publishes /turtle1/cmd_vel (Twist) │
│ │ ▼
│ ▼ Speaker output
└── [angle_controller node]
subscribes /target_angle
subscribes /turtle1/pose
PID control → publishes /turtle1/cmd_vel
│
▼
[turtlesim_node]
Referencia de configuración
Todos los ajustes se encuentran en config.env. Edítalo y recompila para aplicar los cambios.
| Variable | Predeterminado | Descripción |
|---|---|---|
GROQ_API_KEY | (required) | Tu clave de API de Groq |
MIC_INDEX | 1 | Índice de dispositivo PyAudio del reSpeaker |
WAKEWORD_MODEL | hey jarvis | Frase de palabra de activación |
WAKEWORD_THRESHOLD | 0.5 | Sensibilidad de detección (0.0–1.0, menor = más sensible) |
WAKEWORD_COOLDOWN | 2 | Segundos antes de que la palabra de activación pueda volver a dispararse |
RECORDING_SECONDS | 4 | Tiempo de grabación después de que se active la palabra de activación |
SAMPLE_RATE | 16000 | Frecuencia de muestreo de audio en Hz |
LLM_MODEL | llama-3.1-8b-instant | Modelo Groq LLM para el análisis de intención |
STT_MODEL | whisper-large-v3-turbo | Modelo Groq Whisper para transcripción |
TTS_MODEL | canopylabs/orpheus-v1-english | Modelo Groq TTS |
TTS_VOICE | autumn | Voz para la salida de voz (tara, leah, leo, dan, mia) |
Recursos
Creado con:
- Seeed Studio reSpeaker Flex — matriz de micrófonos con chip XMOS XVF3800
- ROS2 Humble — middleware para robots
- openwakeword — detección local de palabra de activación
- Groq — Whisper STT ultrarrápido, LLaMA LLM, Orpheus TTS
- TurtleSim — simulador de tortuga para ROS2
Soporte técnico y debate sobre el producto
Gracias por elegir nuestros productos. Estamos aquí para ofrecerte diferentes tipos de soporte y garantizar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para adaptarnos a diferentes preferencias y necesidades.