Desplegando Tu Brazo Robótico Inteligente Controlado por Voz con reSpeaker + HorizonArm-Mark
Objetivo: Hacer que el brazo robótico HorizonArm-Mark funcione con reSpeaker XVF3800 para lograr la operación del brazo robótico controlado por voz.
Seeed-Projects: https://github.com/Seeed-Projects
reSpeaker XVF3800 es un arreglo circular profesional de 4 micrófonos basado en el chip XMOS XVF3800. Cuenta con modo dual, captación de campo lejano de 360° (hasta 5 metros), Cancelación de Eco Acústico (AEC), Control Automático de Ganancia (AGC), Dirección de Llegada (DoA), desreverberación, formación de haz y supresión de ruido, proporcionando captación de voz confiable en entornos ruidosos. Con sus potentes capacidades de captura de audio y reducción de ruido, proporciona excelentes "oídos" para aplicaciones de control por voz.
Parte 1: Preparación de Hardware y Firmware de reSpeaker
Esta sección explica cómo flashear el firmware USB para el reSpeaker XVF3800. El firmware USB soporta modo plug-and-play, permitiendo conexión directa a PCs, Raspberry Pi y otros dispositivos. El firmware USB solo soporta USB DFU (no I2C DFU). Si el dispositivo está ejecutando actualmente firmware I2S, por favor ingrese al Modo Seguro primero, luego flashee el firmware USB usando USB DFU. El Modo Seguro soporta tanto USB DFU como I2C DFU.
Recursos de Referencia:
- Guía de Introducción reSpeaker XVF3800
- Repositorio de Firmware reSpeaker XVF3800
- Repositorio de Código reSpeaker
1.1 Preparación
Requisitos de Hardware
| Elementos | Descripción |
|---|---|
| reSpeaker XVF3800 USB 4-Mic Array | Arreglo de micrófonos controlador principal |
| Cable USB Type-C | Usado para alimentación y transmisión de datos |
| Computadora | Compatible con Windows / macOS / Linux |
Preparación de Software (Instalando dfu-util)
Windows:
- Descarga y extrae los binarios de
dfu-util(ej.,D:\dfu-util-0.11-binaries\win64\) - Agrega el directorio que contiene
dfu-util.exeal PATH del sistema - Abre un símbolo del sistema y ejecuta
dfu-util -Vpara verificar la instalación - Si
dfu-util -ldevuelveLIBUSB_ERROR_NOT_SUPPORTED, por favor usa Zadig para reemplazar el controlador del dispositivo con WinUSB
macOS (Homebrew):
brew install dfu-util
dfu-util -l
Linux (Debian / Ubuntu / Raspberry Pi OS):
sudo apt update
sudo apt install dfu-util
sudo dfu-util -l
Descargar Firmware USB
Visita el repositorio de firmware: https://github.com/respeaker/reSpeaker_XVF3800_USB_4MIC_ARRAY/tree/master/xmos_firmwares
Selecciona uno de los siguientes firmwares USB según tus necesidades (la versión de 2 canales es generalmente suficiente):
| Firmware | Canales | Descripción |
|---|---|---|
respeaker_xvf3800_usb_dfu_firmware_v2.0.x.bin | 2 | Salida de doble canal procesada Canal 0: Conferencia Canal 1: ASR |
respeaker_xvf3800_usb_dfu_firmware_6chl_v2.0.x.bin | 6 | Canal 0: Audio procesado (Conferencia) Canal 1: Audio procesado (ASR) Canales 2-5: Datos en bruto para Micrófonos 0-3 |
1.2 Conectar e Ingresar al Modo DFU
Instrucciones de Cableado
Al conectar a una computadora, por favor usa el puerto USB-C cerca del conector de auriculares de 3.5mm (lado XMOS). No uses el puerto del lado XIAO.
Ingresando al Modo Seguro
El modo seguro es requerido en las siguientes situaciones:
- El firmware actual está en modo I2S y necesita cambiarse a modo USB
- El firmware está corrupto o se flasheó firmware incorrecto
Pasos de Operación:
- Desconecta completamente el dispositivo de la alimentación
- Mantén presionado el botón Mute de la placa
- Mientras mantienes el botón presionado, reconecta la alimentación
- Cuando el LED rojo comience a parpadear, suelta el botón — el dispositivo ha ingresado al Modo Seguro
1.3 Flashear Firmware USB Usando dfu-util
Confirmar Visibilidad del Dispositivo
Ejecuta el siguiente comando para verificar si el dispositivo es reconocido:
# Linux / Raspberry Pi OS
sudo dfu-util -l
# macOS / Windows
dfu-util -l
La salida esperada debe incluir: Found DFU: [2886:001a] ... alt=1, name="reSpeaker DFU Upgrade"
Ejecutar Comando de Flasheo
# Linux / Raspberry Pi OS (needs sudo)
sudo dfu-util -R -e -a 1 -D /path/to/respeaker_xvf3800_usb_dfu_firmware_v2.0.x.bin
# macOS / Windows (no sudo needed)
dfu-util -R -e -a 1 -D /path/to/respeaker_xvf3800_usb_dfu_firmware_v2.0.x.bin
Descripción de Parámetros:
-R: Reiniciar/rebootear el dispositivo después de que el flasheo esté completo-e: Borrar firmware original-a 1: Escribir a la partición de Actualización-D: Especificar la ruta al archivo de firmware
Después de que el flasheo esté completo, el dispositivo se reiniciará automáticamente y cargará el firmware USB.
1.4 Verificación y Solución de Problemas
Verificar Firmware
Después de flashear el firmware USB, puedes verificarlo de la siguiente manera:
-
Detección del Administrador de Dispositivos
- Windows: Abre el Administrador de Dispositivos; deberías ver "reSpeaker 3800" bajo "Sonido, vídeo y controladores de juegos"
- macOS/Linux: Ejecuta el comando
lsusbpara verificar si el dispositivo es reconocido como un dispositivo de audio USB

-
Prueba de Grabación
- Usa Audacity u otro software de grabación
- Selecciona "reSpeaker 3800" como el dispositivo de grabación
- Establece la frecuencia de muestreo a 16000 Hz y el número de canales según el firmware flasheado (2 o 6 canales)
- Inicia la grabación y prueba la captura de voz
Preguntas Comunes
P: ¿No puedes detectar el dispositivo con dfu-util -l?
- Verifica el cable USB y el puerto (debes usar el conector del lado XMOS, el puerto USB-C cerca del conector de auriculares de 3.5mm)
- Si el dispositivo está ejecutando actualmente firmware I2S, por favor ingresa al Modo Seguro primero
- Usuarios de Windows: Asegúrate de que el controlador WinUSB sea usado vía Zadig
P: ¿Error durante el flasheo?
- Intenta cambiar el cable USB o el puerto del host
- Re-flashea en Modo Seguro
P: ¿La computadora no reconoce el dispositivo después del flasheo?
- Asegúrate de estar usando el archivo de firmware USB (el nombre del archivo comienza con
usb), no el firmware I2S - Intenta reconectar el dispositivo o cambiar el puerto USB
P: ¿Sin sonido o sonido anormal durante la grabación?
- Verifica si la frecuencia de muestreo del software de grabación está establecida a 16000 Hz
- Confirma que el conteo de canales coincida con el firmware (2 o 6 canales)
- Verifica si el micrófono está silenciado (ve si el LED rojo de silencio está encendido; presiona el botón de silencio para desactivar el silencio)
Parte 2: Configuración de Software y Conexión
2.1 Conexión de Hardware
Asegúrate de que la computadora de control esté conectada tanto al brazo robótico como al arreglo de micrófonos vía USB.
2.2 Conectando el Brazo Robótico
- Abre el software de control del brazo robótico, HorizonArm
- Haz clic en el botón Connect en la esquina superior izquierda
- Selecciona el puerto serie correspondiente (ej., COM3) y la velocidad de baudios (500000)
- Selecciona Motor ID Settings → Robotic Arm → Custom ID, y confirma que muestre: 1, 2, 3, 4, 5, 6
- Haz clic en Connect
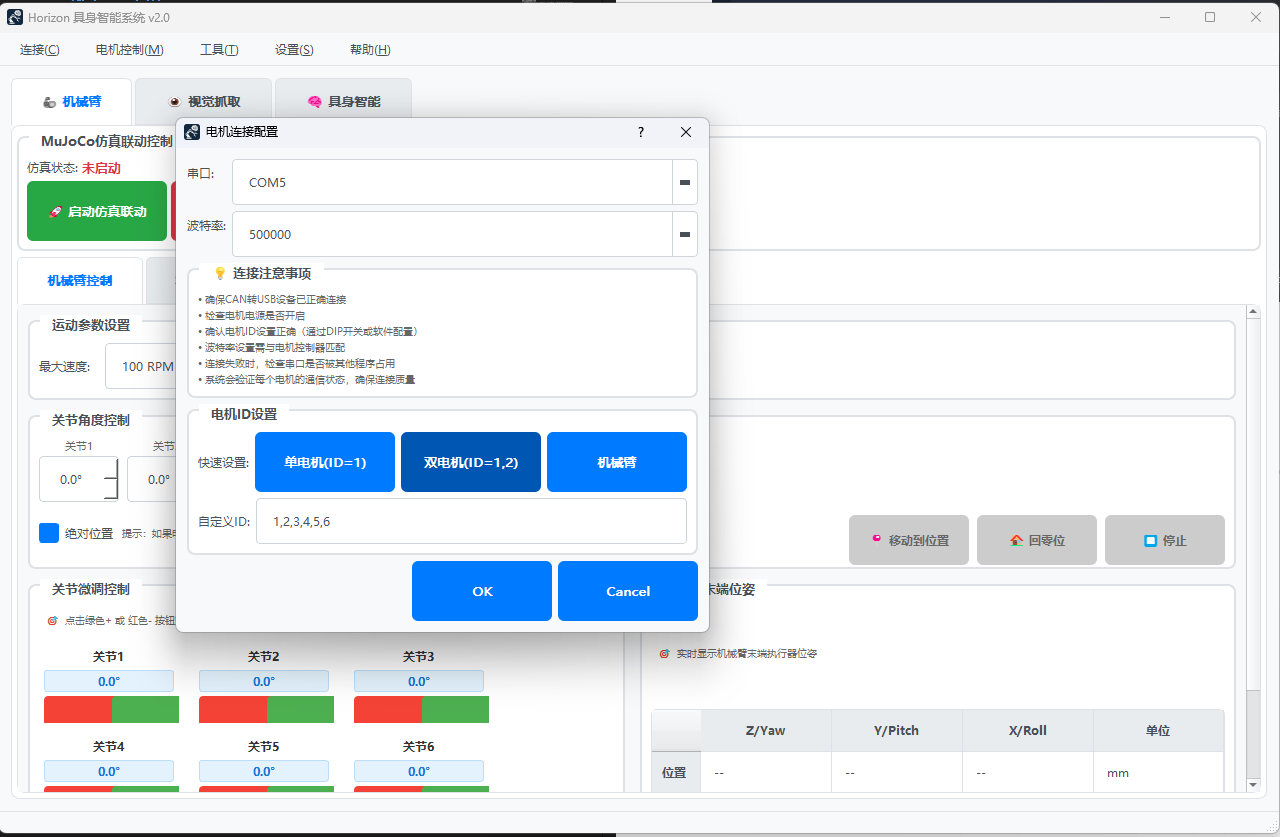
Una vez que la conexión sea exitosa, puedes ver el estado del brazo robótico en la interfaz de HorizonArm. Haz clic en Go to Zero para devolver el brazo a su posición inicial (estado recto de 90 grados).
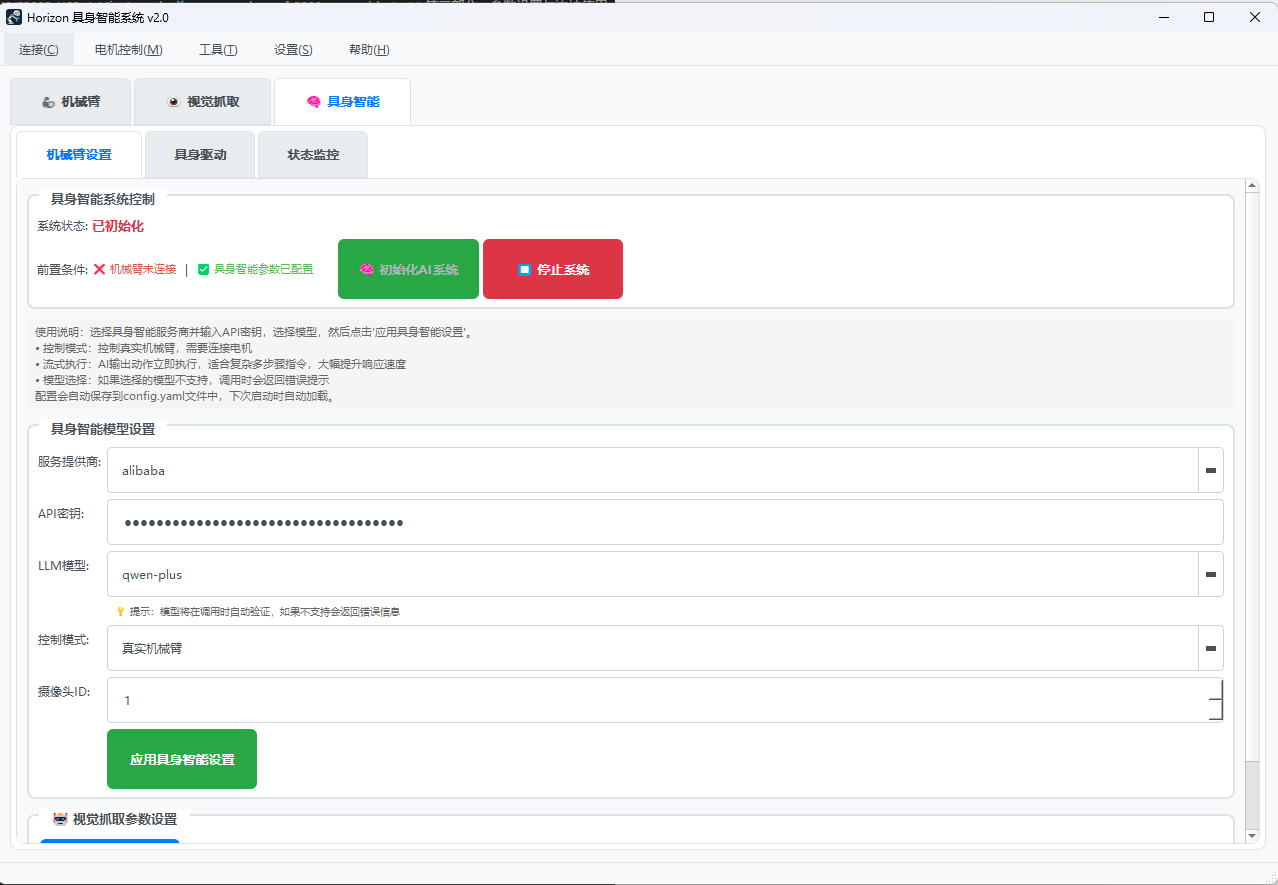
2.3 Configurando el Sistema de IA
- Haz clic en la interfaz Embodied Intelligence
- Configura parámetros:
- Ingresa la dirección API y la clave para el LLM (Modelo de Lenguaje Grande)
- Selecciona el ID de Cámara (usualmente 1, o 0 para algunos modelos)
- Haz clic en Initialize AI System
- Ingresa a la interfaz Embodied Drive para comenzar a usarla
2.4 Operación de Control por Voz
Después de ingresar a la interfaz de ejecución, verás cuatro botones de control:

Métodos de Operación:
| Función | Instrucciones de Operación |
|---|---|
| Execute Command | Ingresa un comando en la caja de texto y haz clic en el botón para ejecutarlo |
| Run Dialogue | Similar a una función de grabación: • Primer clic: Iniciar grabación • Segundo clic: Terminar grabación La grabación será enviada al LLM para procesamiento, los resultados se mostrarán en la interfaz, y el brazo robótico realizará acciones basadas en las instrucciones |
| Enable Dialogue Mode | El brazo robótico ingresa a un estado de escucha continua. Después de decir la palabra de activación "Mark", el habla subsecuente será reconocida como un comando y ejecutada |
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestro producto! Proporcionamos múltiples canales de comunicación para asegurar que tengas una experiencia fluida con el producto.