Cómo usar RoboSense LiDAR en reComputer
Introducción
Los sensores LiDAR de RoboSense proporcionan datos de nube de puntos 3D de alta precisión para diversas aplicaciones. Esta guía se enfoca en configurar el modelo RS32 en un dispositivo reComputer J30/40 ejecutando ROS Noetic.
Esta wiki proporciona una guía paso a paso para instalar y configurar RoboSense LiDAR en reComputer J30/40 Jetson usando ROS, y visualizar datos de nube de puntos.
Prerrequisitos
-
reComputer serie J30/40: Ya completó la instalación del sistema JetPack 5.x y el entorno ROS Noetic según el tutorial.
-
RoboSense toda la serie lidar

Comenzando
Instalar Robosense SDK
-
Paso 1: Instalar Dependencias Básicas
sudo apt-get update &&
sudo apt-get install -y libyaml-cpp-dev libpcap-dev -
Paso 2: Crear Espacio de Trabajo
mkdir -p catkin_ws/src
cd catkin_ws/src -
Paso 3: Clonar el rslidar_sdk
git clone https://github.com/RoboSense-LiDAR/rslidar_sdk.git
cd rslidar_sdk
git submodule init
git submodule update -
Paso 4: Abrir el archivo CMakeLists.txt ubicado en catkin_ws/src/rslidar_sdk/CMakeLists.txt y cambiar la variable COMPILE_METHOD en la parte superior del archivo a CATKIN.

-
Paso 4: Eliminar el archivo package.xml existente ubicado en el directorio catkin_ws/src/rslidar_sdk/,Renombrar el archivo package_ros1.xml a package.xml.

-
Paso 5: Ingresar los Siguientes Comandos en la Terminal
cd ~/catkin_ws/src/rslidar_sdk/
mkdir build && cd build
cmake .. && make -j4
cd ~/catkin_ws/
catkin_make
Conectar Hardware
- Paso 1: Conectar la fuente de alimentación, Robosense RS32 LiDAR, caja de interfaz, y cable Ethernet al reComputer J4012 como se describe a continuación:
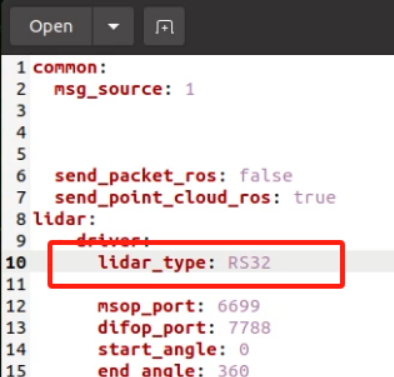
- Paso 2: Abrir el archivo config.yaml ubicado en /catkin_ws/src/rslidar_sdk/config/config.yaml y cambiar el lidar_type en la línea 10 a RS32. Guardar el archivo y cerrarlo. Asegúrese de completar el modelo LiDAR correcto según su dispositivo.
Configurar Dirección IP de reComputer
La dirección IP predeterminada para el Robosense RS32 LiDAR es 192.168.1.200, la dirección IP de la máquina host objetivo es 192.168.1.102, el número de puerto del paquete MSOP es 6699, y el número de puerto del paquete DIFOP es 7788. Después de conectar el hardware, necesita configurar manualmente la dirección IP del reComputer.
-
Paso 1: Abrir Configuración de Ethernet.

-
Paso 2: Seleccionar Configuración Manual en el campo IPv4 e ingresar la dirección IP 192.168.1.102 y máscara 255.255.255.0.

ping 192.168.1.200
Si recibe datos del LiDAR, indica una conexión exitosa.
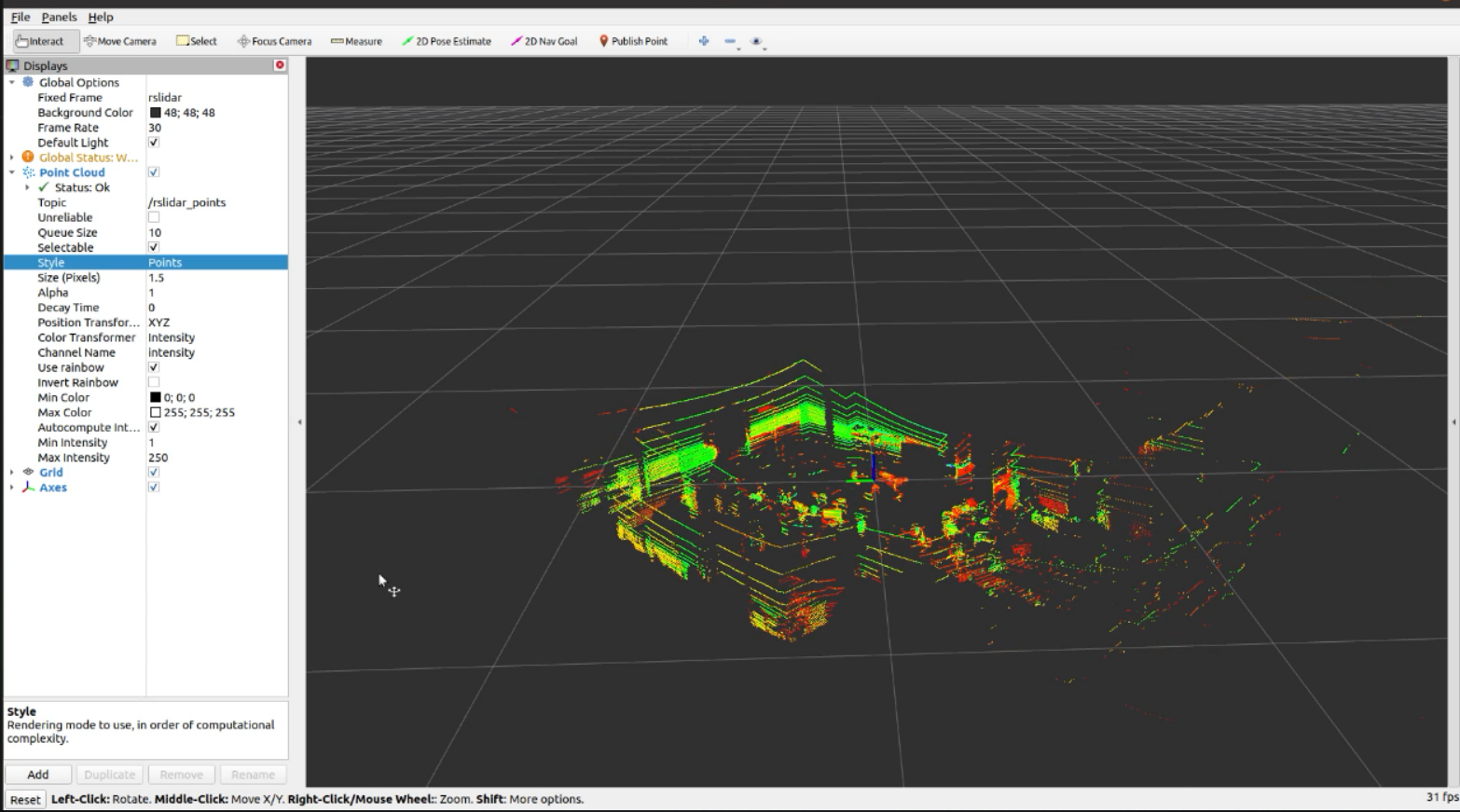
Ejecutar Código Lidar
cd ~/catkin_ws/
source devel/setup.bash
roslaunch rslidar_sdk start.launch
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarle diferentes tipos de soporte para asegurar que su experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para atender diferentes preferencias y necesidades.