Entrenamiento de Política SoArm101 con IsaacLab
Introducción
Este wiki introduce cómo usar Isaac Lab para entrenar y probar políticas de brazos robóticos SO-ARM100/101 con aprendizaje por refuerzo.
📌Prerrequisitos
- Una PC Ubuntu con GPU Nvidia
Si no tienes controladores CUDA o Conda instalados, por favor configúralos primero.
Comenzando
🚀 Paso 1. Instalar Isaac Lab
NVIDIA Isaac™ Lab es un marco unificado de código abierto para aprendizaje robótico que ayuda a investigadores y desarrolladores a entrenar políticas robóticas de manera eficiente.
Ejecuta los siguientes comandos en la terminal de la PC Ubuntu:
# Create and activate Conda environment
conda create -n isaaclab python=3.10
conda activate isaaclab
# Install PyTorch (GPU version)
pip install torch==2.7.0 torchvision==0.22.0 --index-url https://download.pytorch.org/whl/cu128
# Upgrade pip
pip install --upgrade pip
# Install Isaac Sim (with extensions)
pip install 'isaacsim[all,extscache]==4.5.0' --extra-index-url https://pypi.nvidia.com
# Clone IsaacLab repository
cd ~/Documents
git clone https://github.com/isaac-sim/IsaacLab.git
# Install dependencies
sudo apt install cmake build-essential
# Initialize setup
cd IsaacLab
./isaaclab.sh --install
Ejecuta el siguiente comando para verificar la instalación:
./isaaclab.sh -p scripts/tutorials/00_sim/create_empty.py
Si es exitoso, debería aparecer una ventana vacía de Isaac Sim.
🤖 Paso 2. Instalar el Proyecto isaac_so_arm101
Este repositorio implementa tareas para los robots SO‑ARM100 y SO‑ARM101 usando Isaac Lab. Sirve como base para varios tutoriales en la serie de proyectos de LycheeAI Hub: SO‑ARM101 × Isaac Sim × Isaac Lab.
Ejecuta los siguientes comandos:
cd ~/Documents
git clone https://github.com/MuammerBay/isaac_so_arm101.git
cd isaac_so_arm101
# Install project dependencies
python -m pip install -e source/SO_100
# Test environments
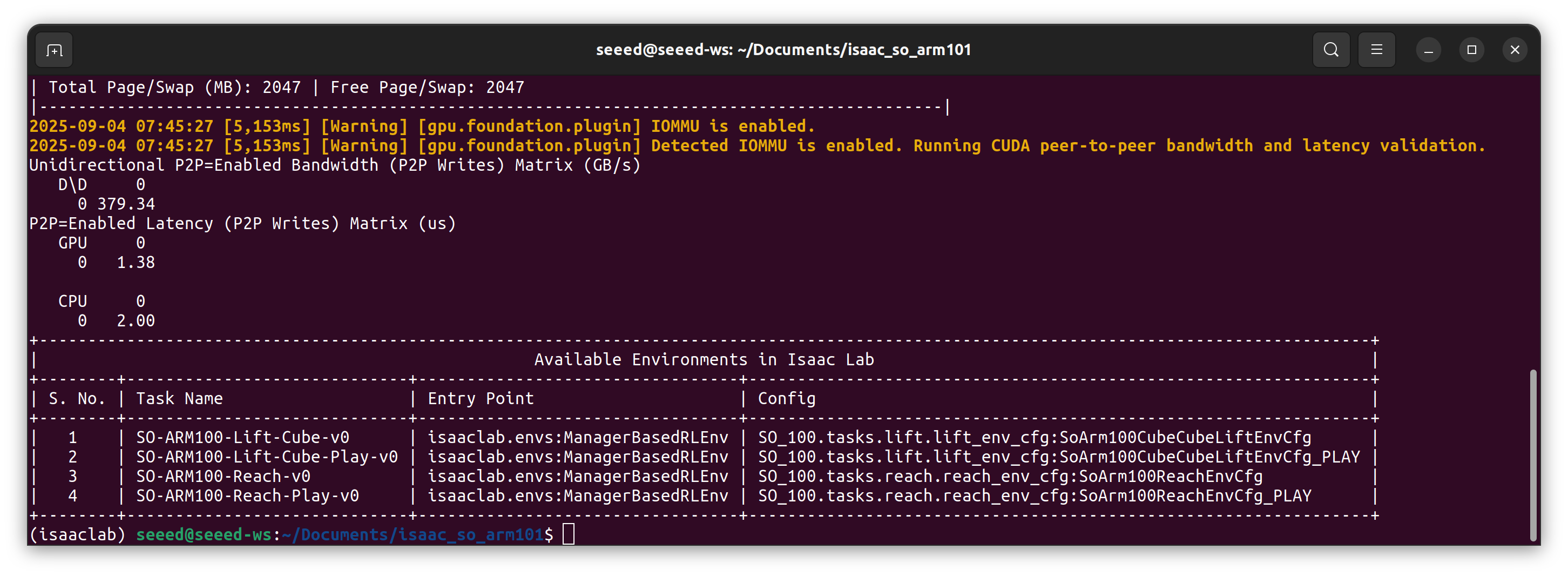
python scripts/list_envs.py
Si el proyecto isaac_so_arm101 se instala exitosamente, la ventana de terminal imprimirá el siguiente registro:
🎯 Paso 3. Iniciar Entrenamiento
Lanza el entrenamiento con:
python scripts/rsl_rl/train.py --task SO-ARM100-Reach-v0
Esto abrirá una ventana de Isaac Sim donde puedes observar el proceso de entrenamiento en tiempo real. Puedes agregar el parámetro --headless al comando de lanzamiento para acelerar el proceso de entrenamiento.
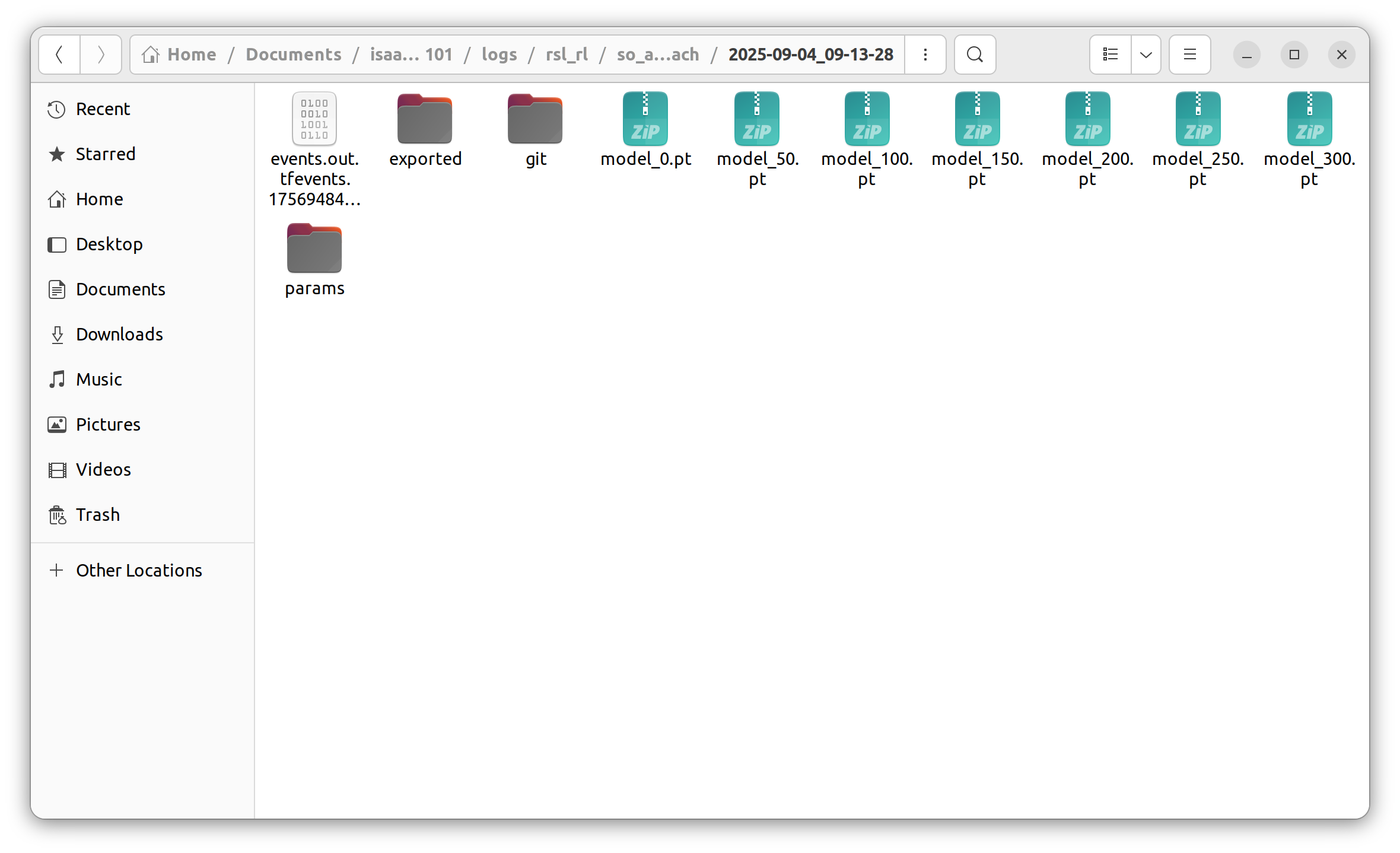
Después del entrenamiento, los pesos del modelo se guardarán en:
~/Documents/isaac_so_arm101/logs/rsl_rl/so_arm100_reach
🧪 Paso 4. Probar el Modelo
Prueba el modelo entrenado con:
python scripts/rsl_rl/play.py --task SO-ARM100-Reach-Play-v0
Durante las pruebas, las posiciones objetivo se generan aleatoriamente dentro de un rango definido, y el modelo entrenado dirige el brazo robótico para alcanzar esos objetivos.
Referencias
- https://lycheeai-hub.com/project-so-arm101-x-isaac-sim-x-isaac-lab-tutorial-series
- https://github.com/MuammerBay/isaac_so_arm101
- https://github.com/huggingface/lerobot
- https://github.com/isaac-sim/IsaacLab
- https://github.com/leggedrobotics/rsl_rl
Soporte Técnico y Discusión del Producto
¡Gracias por elegir nuestros productos! Estamos aquí para brindarle diferentes tipos de soporte para asegurar que su experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para satisfacer diferentes preferencias y necesidades.