Control por voz de reBot Arm B601 con Nvidia Jetson Thor
Introducción
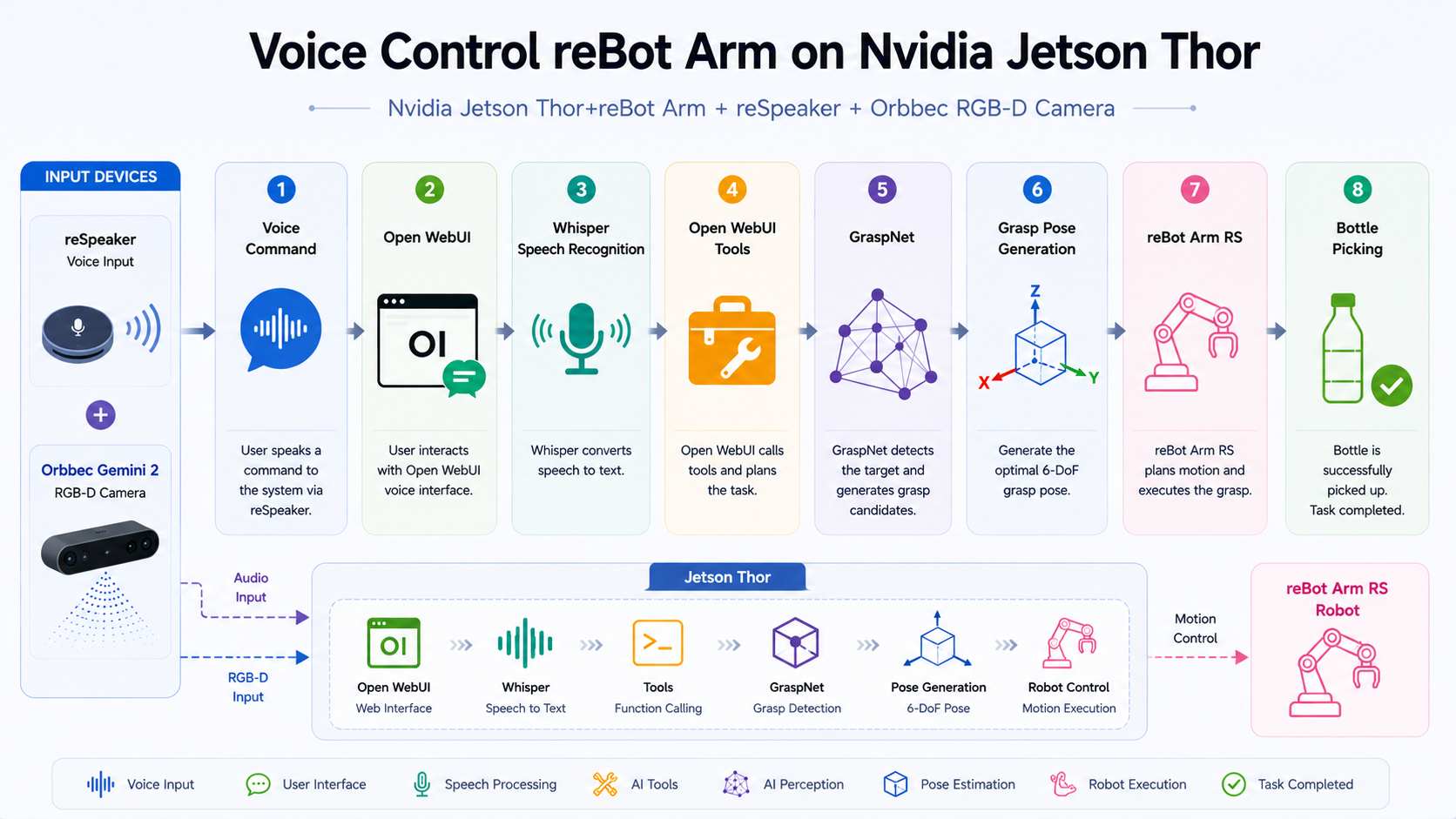
Los modelos de lenguaje grandes (LLMs) están haciendo que los sistemas robóticos sean más intuitivos al permitir la interacción en lenguaje natural. Combinados con visión robótica y planificación de agarre, los usuarios pueden controlar robots usando simples comandos de voz.

En este tutorial, desplegaremos un sistema completo de agarre robótico controlado por voz en la plataforma NVIDIA Jetson Thor.
Características
- Inferencia de IA completamente local en Jetson Thor
- Interacción por voz usando Whisper
- LLM local impulsado por Ollama
- Interfaz OpenWebUI basada en navegador
- Detección de agarre 6-DoF usando GraspNet
- Control en tiempo real del brazo robótico
Flujo de trabajo
Preparación de hardware
Hardware requerido
- Nvidia Jetson Thor (JetPack 7.x instalado)
- reBot Arm B601 DM
- Adaptador USB-a-CAN
- Cámara RGBD Orbbec Gemini 2
- reSpeaker
- Fuente de alimentación y cable USB para el brazo robótico
- Botón USB (opcional)
| reBot Arm B601 | Kit de desarrollo NVIDIA® Jetson AGX Thor™ | Cámara RGBD Orbbec Gemini 2 | reSpeaker Flex XVF3800 Linear-4 |
|---|---|---|---|
 |  |  |  |
Conexión de hardware
- Conecta la cámara al puerto USB de Jetson Thor.
- Conecta el reBot Arm RS a Jetson Thor mediante el módulo CAN2USB.
- Conecta el micrófono USB a Jetson Thor.
- Enciende todos los dispositivos.
Instalar Ollama
Paso 1. Instalar Ollama
curl -fsSL https://ollama.com/install.sh | sh
Paso 2. Descargar un modelo de lenguaje
ollama pull nemotron3:33b
Paso 3. Verificar Ollama
ollama run nemotron3:33b
Desplegar OpenWebUI
Paso 1. Iniciar OpenWebUI
docker run -d -p 4000:8080 \
--add-host=host.docker.internal:host-gateway \
-e OLLAMA_BASE_URL=http://host.docker.internal:11434 \
-v open-webui_tt:/app/backend/data --name open-webui_tt \
ghcr.io/open-webui/open-webui:main
Nota: La imagen oficial de Docker de Open WebUI no incluye una función de pulsar para hablar (grabación de voz activada por botón). Si deseas habilitar la funcionalidad de pulsar para hablar, utiliza en su lugar la siguiente imagen de Docker.
Paso 2. Acceder a la interfaz
Abre tu navegador y visita:
http://<Jetson-IP>:3000
Paso 3. Conectar Ollama
Configura el endpoint de Ollama dentro de OpenWebUI.
http://host.docker.internal:11434
Si Open WebUI no puede conectarse correctamente a Ollama, modifica la configuración del servicio systemd de Ollama y luego reinicia el servicio de Ollama: /etc/systemd/system/ollama.service
[Unit]
Description=Ollama Service
After=network-online.target
[Service]
ExecStart=/usr/local/bin/ollama serve
User=ollama
Group=ollama
Restart=always
RestartSec=3
Environment="PATH=/home/seeed/.local/bin:/home/seeed/.local/bin:/home/seeed/.nvm/versions/node/v22.22.2/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/games:/usr/local/games:/snap/bin"
Environment="OLLAMA_HOST=0.0.0.0:11434"
[Install]
WantedBy=default.target
Paso 4. Configurar las herramientas
Workspace --> Tools --> New Tool
robot arm tools
"""
title: Grasp Web Robot Arm
author: seeedstudio
version: 0.3.0
description: Open WebUI tools for controlling grasp_web.py robot arm HTTP API.
requirements: requests
"""
import os
import requests
from typing import Dict, Any, List, Optional
class Tools:
def __init__(self):
self.base_url = os.getenv(
"GRASP_BASE", "http://host.docker.internal:8090"
).rstrip("/")
self.timeout = float(os.getenv("GRASP_TIMEOUT", "20"))
def _json_or_text(self, r: requests.Response):
try:
return r.json()
except Exception:
return r.text
def _get(self, path: str) -> Dict[str, Any]:
try:
r = requests.get(f"{self.base_url}{path}", timeout=self.timeout)
return {
"ok": r.ok,
"status_code": r.status_code,
"data": self._json_or_text(r),
}
except Exception as e:
return {"ok": False, "error": str(e)}
def _post(self, path: str, payload: Optional[dict] = None) -> Dict[str, Any]:
try:
r = requests.post(
f"{self.base_url}{path}",
json=payload or {},
timeout=self.timeout,
)
return {
"ok": r.ok,
"status_code": r.status_code,
"data": self._json_or_text(r),
}
except Exception as e:
return {"ok": False, "error": str(e)}
# -------------------------
# 状态查询
# -------------------------
def robot_state(self) -> Dict[str, Any]:
"""
读取机器人状态:关节角度、末端位姿、夹爪状态,包括位置、速度、力矩、是否夹住。
这是只读操作,不会驱动机械臂。
"""
return self._get("/robot/state")
# -------------------------
# 基础操作
# -------------------------
def reset_robot(self) -> Dict[str, Any]:
"""
复位机器人:停止当前执行、松开夹爪、机械臂回原点。
注意:这会驱动真实机械臂运动。
"""
return self._post("/reset", {})
def move_ready(self) -> Dict[str, Any]:
"""
移动机械臂到预定义就绪位:张开夹爪并移动到就绪姿态。
注意:这会驱动真实机械臂运动。
"""
return self._post("/ready", {})
# -------------------------
# 目标类别设置
# -------------------------
def set_target_class(self, class_name: str) -> Dict[str, Any]:
"""
设置目标类别,例如 bottle、cup、apple。
设置后后端会自动触发推理更新。
传入空字符串 "" 可以取消类别过滤,扫描全场所有检测到的物体。
"""
if class_name is None:
return {"ok": False, "error": "class_name must be a string"}
return self._post("/target", {"class_name": class_name})
def clear_target_filter(self) -> Dict[str, Any]:
"""
取消目标类别过滤,扫描全场所有检测到的物体。
"""
return self._post("/target", {"class_name": ""})
# -------------------------
# 夹爪控制
# -------------------------
def gripper_state(self) -> Dict[str, Any]:
"""
读取夹爪状态:位置、速度、力矩、是否夹住。
这是只读操作,不会驱动机械臂。
"""
return self._post("/gripper", {"action": "state"})
def gripper_open(self, distance_m: float = 0.09) -> Dict[str, Any]:
"""
张开夹爪到指定距离。
参数:
- distance_m: 张开距离,单位米,默认 0.09
注意:这会驱动真实夹爪。
"""
if distance_m < 0:
return {"ok": False, "error": "distance_m must be >= 0"}
return self._post(
"/gripper",
{
"action": "open",
"distance_m": distance_m,
},
)
def gripper_close(self) -> Dict[str, Any]:
"""
闭合夹爪,使用非阻塞力矩模式。
注意:这会驱动真实夹爪。
"""
return self._post("/gripper", {"action": "close"})
def gripper_release(self) -> Dict[str, Any]:
"""
释放夹爪,松开并解除 HOLDING 状态。
注意:这会驱动真实夹爪。
"""
return self._post("/gripper", {"action": "release"})
# -------------------------
# 关节控制
# -------------------------
def joint_jog(
self,
joint: str,
delta_deg: float,
duration_s: float = 2.0,
safety_margin_deg: float = 5.0,
) -> Dict[str, Any]:
"""
单关节点动控制。
参数:
- joint: joint1 ~ joint6
- delta_deg: 相对旋转角度,单位度。正数为正方向,负数为负方向
- duration_s: 运动时间,单位秒
- safety_margin_deg: 限位安全边距,单位度
注意:这会驱动真实机械臂。
"""
valid_joints = {"joint1", "joint2", "joint3", "joint4", "joint5", "joint6"}
if joint not in valid_joints:
return {"ok": False, "error": "joint must be one of joint1 ~ joint6"}
if duration_s <= 0:
return {"ok": False, "error": "duration_s must be greater than 0"}
if safety_margin_deg < 0:
return {"ok": False, "error": "safety_margin_deg must be >= 0"}
return self._post(
"/joint/jog",
{
"joint": joint,
"delta_deg": delta_deg,
"duration_s": duration_s,
"safety_margin_deg": safety_margin_deg,
},
)
def move_joints(
self,
joints_rad: List[float],
duration_s: float = 3.0,
) -> Dict[str, Any]:
"""
一次性设置所有 6 个关节的绝对位置。
参数:
- joints_rad: 6 个关节角,单位弧度
- duration_s: 运动时间,单位秒
关节顺序:
[joint1, joint2, joint3, joint4, joint5, joint6]
注意:这会驱动真实机械臂。
"""
if not isinstance(joints_rad, list) or len(joints_rad) != 6:
return {"ok": False, "error": "joints_rad must be a list of 6 numbers"}
if duration_s <= 0:
return {"ok": False, "error": "duration_s must be greater than 0"}
return self._post(
"/joint/move",
{
"joints_rad": joints_rad,
"duration_s": duration_s,
},
)
def move_zero_joints(self) -> Dict[str, Any]:
"""
将所有关节移动到 0 位。
注意:这会驱动真实机械臂。
"""
return self.move_joints(
joints_rad=[0.0, 0.0, 0.0, 0.0, 0.0, 0.0],
duration_s=3.0,
)
def move_ready_joints(self) -> Dict[str, Any]:
"""
移动到示例就绪关节位:
[0.0, -1.0, -1.5, 0.5, 0.0, 0.0]
注意:这会驱动真实机械臂。
"""
return self.move_joints(
joints_rad=[0.0, -1.0, -1.5, 0.5, 0.0, 0.0],
duration_s=3.0,
)
# -------------------------
# 末端位姿控制
# -------------------------
def move_pose(
self,
x: float,
y: float,
z: float,
roll: float,
pitch: float,
yaw: float,
duration: float = 3.0,
) -> Dict[str, Any]:
"""
末端位姿控制。服务端会先做 IK 规划,不可达则返回错误。
参数:
- x, y, z: 末端位置,单位米
- roll, pitch, yaw: 末端姿态,单位弧度
- duration: 运动时间,单位秒
建议先调用 ready 或 joint/move 到可达位置后,再使用 move_pose。
注意:这会驱动真实机械臂。
"""
if duration <= 0:
return {"ok": False, "error": "duration must be greater than 0"}
return self._post(
"/move/pose",
{
"x": x,
"y": y,
"z": z,
"roll": roll,
"pitch": pitch,
"yaw": yaw,
"duration": duration,
},
)
def move_ready_pose(self) -> Dict[str, Any]:
"""
移动到默认末端就绪位:
x=0.25, y=0.0, z=0.35, roll=0.0, pitch=1.2, yaw=0.0
注意:这会驱动真实机械臂。
"""
return self.move_pose(
x=0.25,
y=0.0,
z=0.35,
roll=0.0,
pitch=1.2,
yaw=0.0,
duration=3.0,
)
def move_near_current_pose(self) -> Dict[str, Any]:
"""
移动到从零位出发通常可达的保守末端位:
x=0.260, y=0.0, z=0.20, roll=0.0, pitch=0.0, yaw=0.0
注意:这会驱动真实机械臂。
"""
return self.move_pose(
x=0.260,
y=0.0,
z=0.20,
roll=0.0,
pitch=0.0,
yaw=0.0,
duration=2.0,
)
# -------------------------
# 底座点动
# -------------------------
def base_jog(
self,
delta_deg: float,
duration_s: float = 2.0,
) -> Dict[str, Any]:
"""
底座点动。
参数:
- delta_deg: 底座旋转角度,单位度。正数为正方向,负数为负方向
- duration_s: 运动时间,单位秒
注意:这会驱动真实机械臂底座。
"""
if duration_s <= 0:
return {"ok": False, "error": "duration_s must be greater than 0"}
return self._post(
"/base_jog",
{
"delta_deg": delta_deg,
"duration_s": duration_s,
},
)
# -------------------------
# 一键自动抓取
# -------------------------
def auto_grasp(
self,
class_name: str = "bottle",
max_retries: int = 10,
retry_interval_s: float = 1.5,
) -> Dict[str, Any]:
"""
一键自动抓取。
流程:
1. 设置目标类别
2. 自动循环推理
3. 检测到目标后执行夹取
后端会在后台运行抓取流程。
可通过 robot_state 查看进度。
参数:
- class_name: 目标类别,例如 bottle。空字符串表示扫描全场
- max_retries: 最大重试次数
- retry_interval_s: 每次重试间隔,单位秒
注意:这会驱动真实机械臂。
"""
if max_retries <= 0:
return {"ok": False, "error": "max_retries must be greater than 0"}
if retry_interval_s <= 0:
return {"ok": False, "error": "retry_interval_s must be greater than 0"}
return self._post(
"/auto_grasp",
{
"class_name": class_name,
"max_retries": max_retries,
"retry_interval_s": retry_interval_s,
},
)
# -------------------------
# 视频流
# -------------------------
def stream_url(self) -> Dict[str, Any]:
"""
返回 MJPEG 视频流地址。
不会驱动机械臂。
"""
return {
"ok": True,
"stream_url": f"{self.base_url}/stream.mjpg",
}
Desplegar el servicio backend de reBot Arm
Paso 1. Instalar paquetes del sistema y Miniconda
sudo apt update
sudo apt install -y git wget curl build-essential cmake libusb-1.0-0-dev python3-pip
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
bash Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc
Paso 2. Clonar el proyecto
git clone https://github.com/jjjadand/reBot-DevArm-Grasp.git rebot_grasp-jetson
cd rebot_grasp-jetson
Si estás utilizando un paquete interno en lugar del repositorio público, copia ese directorio de proyecto a Jetson y ejecuta los comandos restantes desde la raíz del proyecto.
Paso 3. Crear el entorno de Python
Usa Python 3.10 en JetPack 6.x. Usa Python 3.12 en JetPack 7.x / Thor.
# JetPack 6.x
conda create -y -n graspnet python=3.10
# JetPack 7.x / Thor
# conda create -y -n graspnet python=3.12
conda activate graspnet
python -m pip install -U pip wheel setuptools
Comprueba tus versiones de JetPack y CUDA:
cat /etc/nv_tegra_release
nvcc --version
Paso 4. Instalar PyTorch compatible con Jetson
No instales el paquete genérico de PyTorch CPU/GPU de PyPI en Jetson. Instala un wheel que coincida con tus versiones de JetPack, Python y CUDA. Para usuarios de reComputer, también puedes seguir la guía dedicada: Install Pytorch for reComputer Jetson.
Los puntos de partida habituales son:
# JetPack 6.x, CUDA 12.x, Python 3.10
pip install --extra-index-url https://pypi.jetson-ai-lab.io/jp6/cu126 torch torchvision
# JetPack 7.x / Thor, CUDA 13.x, Python 3.12
# pip install --extra-index-url https://pypi.jetson-ai-lab.io/sbsa/cu130 torch torchvision
Verifica CUDA desde Python:
python - <<'PY'
import torch
print("torch:", torch.__version__)
print("cuda available:", torch.cuda.is_available())
print("device:", torch.cuda.get_device_name(0) if torch.cuda.is_available() else "none")
PY
cuda available debe ser True antes de continuar.
Paso 5. Instalar dependencias de Python
pip install -r requirements-graspnet-jetson.txt
Paso 6. Instalar los SDK de robot, GraspNet y GraspNet API
mkdir -p sdk
git clone https://github.com/vectorBH6/reBotArm_control_py.git sdk/reBotArm_control_py
pip install -e sdk/reBotArm_control_py
git clone https://github.com/graspnet/graspnet-baseline.git sdk/graspnet-baseline
git clone https://github.com/graspnet/graspnetAPI.git sdk/graspnetAPI
pip install -e sdk/graspnetAPI
Descarga el checkpoint preentrenado de GraspNet desde la página de descargas de GraspNet y colócalo aquí:
sdk/graspnet-baseline/checkpoints/checkpoint-rs.tar
Paso 7. Establecer rutas de CUDA y compilar los operadores CUDA de GraspNet
Establece la ruta de CUDA para tu versión de JetPack:
# JetPack 6.x example
export CUDA_HOME=/usr/local/cuda-12.6
# JetPack 7.x / Thor example
# export CUDA_HOME=/usr/local/cuda-13.0
export PATH="$CUDA_HOME/bin:$PATH"
export LD_LIBRARY_PATH="$CUDA_HOME/lib64:$LD_LIBRARY_PATH"
Compila las extensiones CUDA utilizadas por GraspNet:
bash scripts/install_graspnet_cuda_ops.sh
bash scripts/install_graspnet_cuda_ops.sh --check
Si más adelante cambias JetPack, Python, CUDA o PyTorch, vuelve a compilar con:
bash scripts/install_graspnet_cuda_ops.sh --force
Paso 8. Instalar el SDK de la cámara Orbbec
El proyecto incluye un asistente que instala pyorbbecsdk2 en el entorno de Python activo:
bash scripts/install_pyorbbecsdk.sh
Si necesitas compilar el SDK localmente, primero clona el árbol de código fuente y ejecuta el modo de código fuente:
git clone https://github.com/orbbec/pyorbbecsdk.git sdk/pyorbbecsdk
bash scripts/install_pyorbbecsdk.sh --from-source
Instala las reglas udev de Orbbec cuando el árbol de código fuente del SDK esté disponible:
sudo bash sdk/pyorbbecsdk/scripts/env_setup/install_udev_rules.sh
sudo udevadm control --reload-rules
sudo udevadm trigger
Paso 9. Descargar pesos de YOLO y exportar TensorRT en el Jetson de destino
Los archivos de motor de TensorRT son específicos del dispositivo. Siempre exporta el .engine en el Jetson que ejecutará la demostración.
mkdir -p models
wget https://github.com/ultralytics/assets/releases/download/v8.3.0/yolo11n-seg.pt -O models/yolo11n-seg.pt
yolo export model=models/yolo11n-seg.pt format=engine imgsz=640 half=True device=0 workspace=4
La salida esperada es:
models/yolo11n-seg.engine
Si la exportación FP16 falla en tu plataforma, exporta sin half=True:
yolo export model=models/yolo11n-seg.pt format=engine imgsz=640 device=0 workspace=4
Verificar y calibrar
Ejecuta estas comprobaciones en orden antes de intentar una sujeción real.
1. Comprobar la cámara RGB-D
conda activate graspnet
cd ~/rebot_grasp-jetson
python scripts/verify_pyorbbec_stream.py
python scripts/verify_pyorbbec_stream.py --preview --seconds 10
La comprobación solo de texto debe informar información de fotogramas RGB y de profundidad. La comprobación de vista previa debe mostrar ventanas RGB y de profundidad cuando haya una pantalla de escritorio disponible.
2. Comprobar la conexión del robot
Comienza con el modo de solo lectura:
python scripts/verify_rebot_arm_motion.py --read-only
Luego ejecuta un pequeño movimiento de la articulación 6 después de confirmar que la trayectoria del brazo está despejada:
python scripts/verify_rebot_arm_motion.py --deg 5
3. Comprobar la pila de GraspNet
python scripts/verify_graspnet_stack.py
Si la cámara aún no está conectada pero solo quieres comprobar los archivos de Python, CUDA, GraspNet y YOLO:
python scripts/verify_graspnet_stack.py --skip-camera
4. Realizar la calibración eye-in-hand
Este proyecto utiliza calibración eye-in-hand: la cámara está montada en el efector final y el marcador ArUco está fijo en la mesa. La configuración predeterminada espera un marcador DICT_4X4_50, ID 0, de 0.1 m. El repositorio incluye archivos de marcadores imprimibles como aruco100x100.pdf.
Recopilación automática:
python scripts/collect_handeye_eih.py
Recopilación manual con compensación de gravedad:
python scripts/collect_handeye_eih.py --manual
Los resultados de la calibración se guardan en el directorio de la cámara activa:
config/calibration/orbbec_gemini2/hand_eye.npz
config/calibration/orbbec_gemini2/intrinsics.npz
Verifica la calibración guardada:
python scripts/verify_handeye_calibration.py
Vuelve a calibrar siempre que cambie el soporte de la cámara, la garra, el tamaño de la placa ArUco o la geometría de la mesa.
Iniciar la aplicación
La interfaz Web UI es la primera interfaz de usuario recomendada. Proporciona vídeo MJPEG en vivo, selección de objetivo, vista previa de sujeción, ejecución de sujeción real, ajuste de compensación, movimiento base, control de la garra, posición de preparado y operaciones de reinicio.
Primero inicia en modo de vista previa. Esto no ejecuta movimiento real del robot:
conda activate graspnet
cd ~/rebot_grasp-jetson
python scripts/grasp_web.py \
--host 0.0.0.0 \
--port 8000 \
--num-point 12000 \
--cloud-crop-nsample 32
Abre la Web UI desde un navegador:
http://<jetson_ip>:8000
Usa el modo de vista previa para confirmar el flujo de la cámara, las detecciones de YOLO, el filtrado de objetivos y la generación de puntos de sujeción. Haz clic en el control de inferencia o actualización en la Web UI para actualizar la vista previa de GraspNet.
Abre la página Open WebUI (http://<jetson_ip>:4000). Si has habilitado las Robot Arm Tools en el chat, puedes controlar el brazo robótico directamente usando comandos en lenguaje natural.
Demostración de funciones
Referencias
- https://docs.nvidia.com/jetson/agx-thor-devkit/user-guide/latest/index.html
- https://github.com/Seeed-Projects/reBot-DevArm
- https://github.com/graspnet/graspnet-baseline.git
- https://github.com/vectorBH6/reBotArm_control_py
- https://github.com/orbbec/pyorbbecsdk.git
- https://wiki.seeedstudio.com/es/install_torch_on_recomputer/
Soporte técnico y debate sobre el producto
Gracias por elegir nuestros productos. Estamos aquí para ofrecerte diferentes tipos de soporte y garantizar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para adaptarnos a diferentes preferencias y necesidades.