Seeed Studio XIAO RP2350 con C/C++ SDK
Introducción
El Seeed Studio XIAO RP2350, alimentado por el microcontrolador RP2350, ofrece un rendimiento robusto en un factor de forma pequeño. Esta guía proporciona pasos esenciales para configurar y usar el SDK de C/C++ con el XIAO RP2350.
Prerrequisitos
Antes de comenzar, asegúrate de tener lo siguiente:
- Una computadora ejecutando Windows, macOS o Linux.
- Un cable USB para conectar el XIAO RP2350 a tu computadora.
- Conocimiento básico de programación en C/C++.
Guía de Instalación Vía Vscode
Para aquellos que prefieren la experiencia de desarrollo nativa, explora la Documentación del SDK de C/C++ de Raspberry Pi Pico o Raspberry Pi Pico SDK | GitHub.
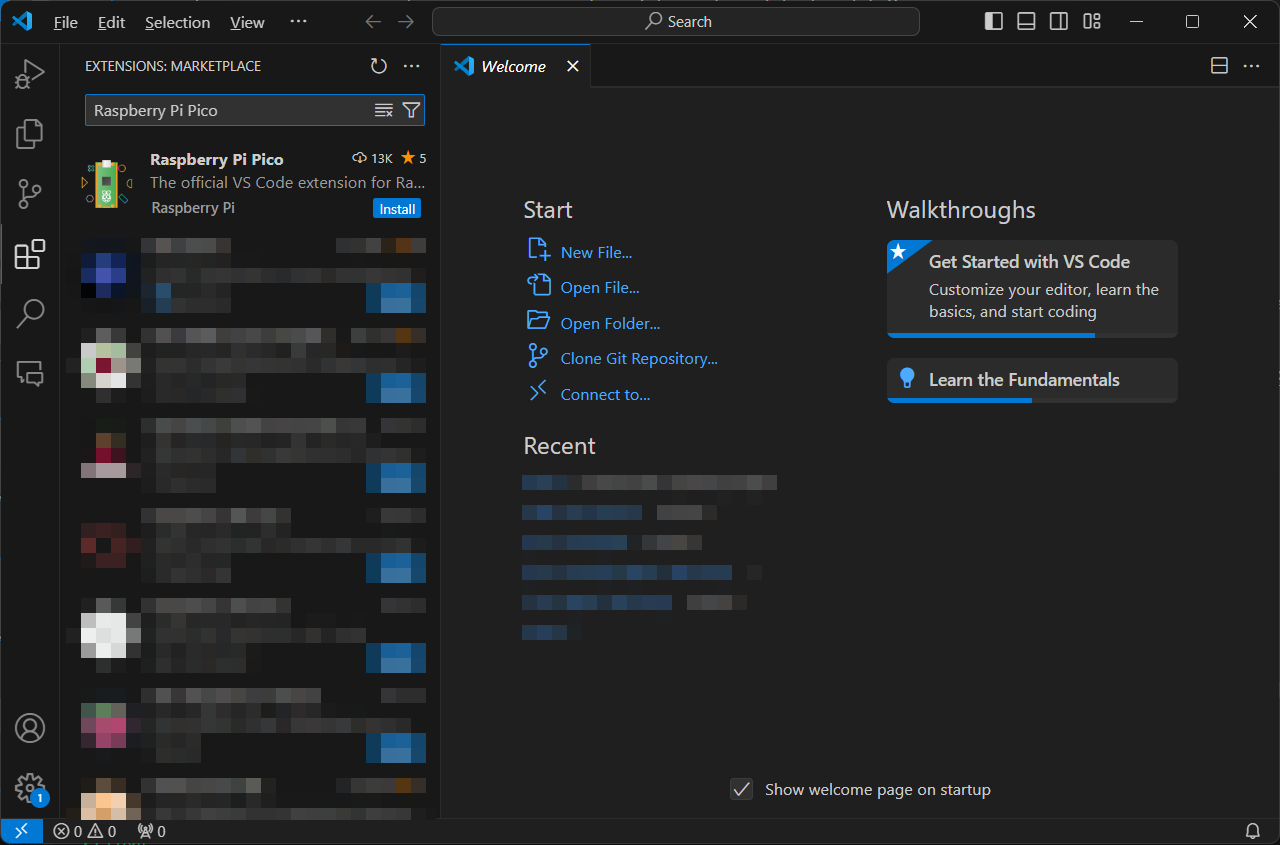
Para una experiencia más fácil y simplificada con la programación del SDK, especialmente para aquellos nuevos en esto, puedes instalar la extensión Raspberry Pi Pico para Visual Studio Code (VSCode).
Esta extensión simplifica el proceso de configuración guiándote a través de las instalaciones necesarias de la cadena de herramientas, evitando la necesidad de instalar manualmente cada herramienta individualmente. Sin embargo, aún necesitarás asegurar que tu sistema cumpla con los requisitos de plataforma: Windows x64, macOS (Sonoma y más reciente), Linux x64, o arm64.
Para instrucciones de instalación detalladas adaptadas a tu sistema operativo, por favor consulta la página de Extensión Raspberry Pi Pico para VSCode.
Paso 1: Instalar la Extensión
Paso 2: Crear un Nuevo Proyecto
Una vez que la página se carga, puedes ver el contenido requerido.
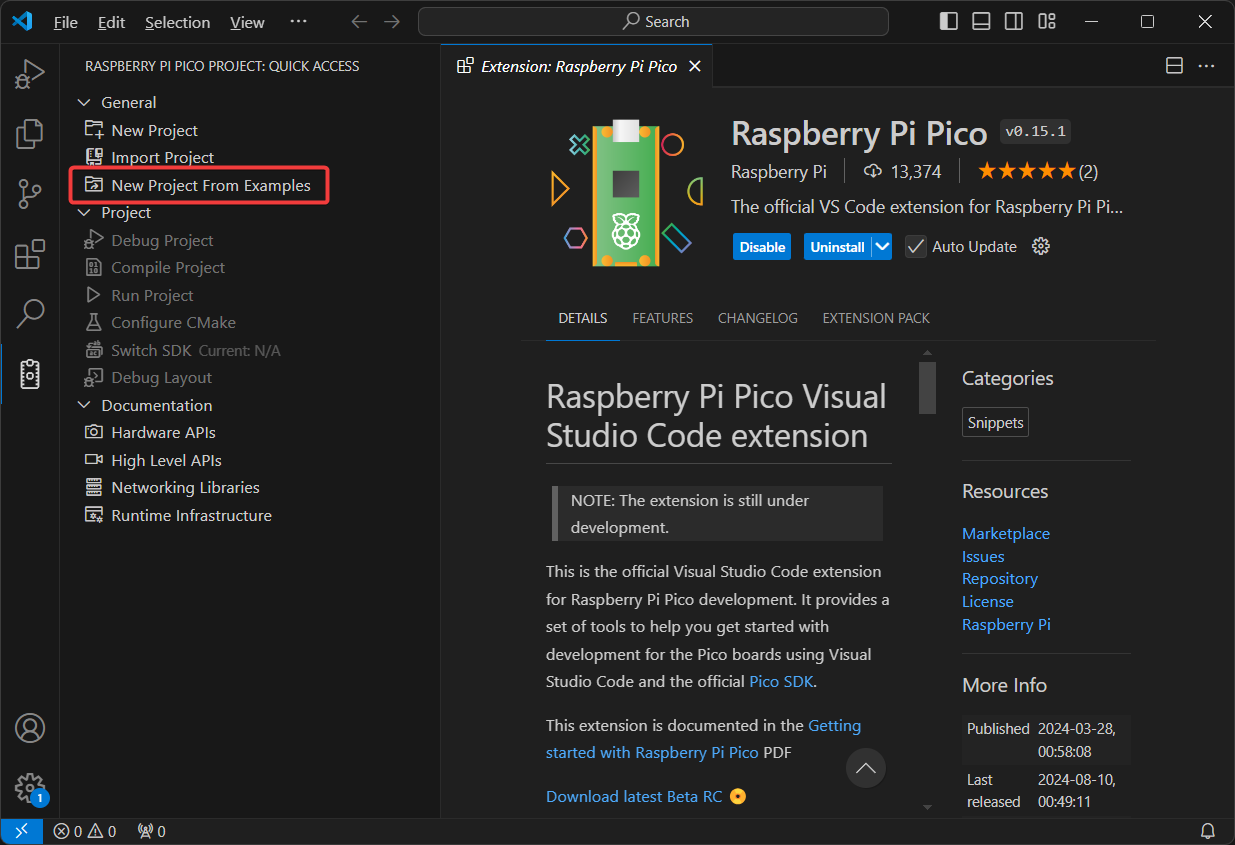
Intenta crear un proyecto vía New Project From Examples.
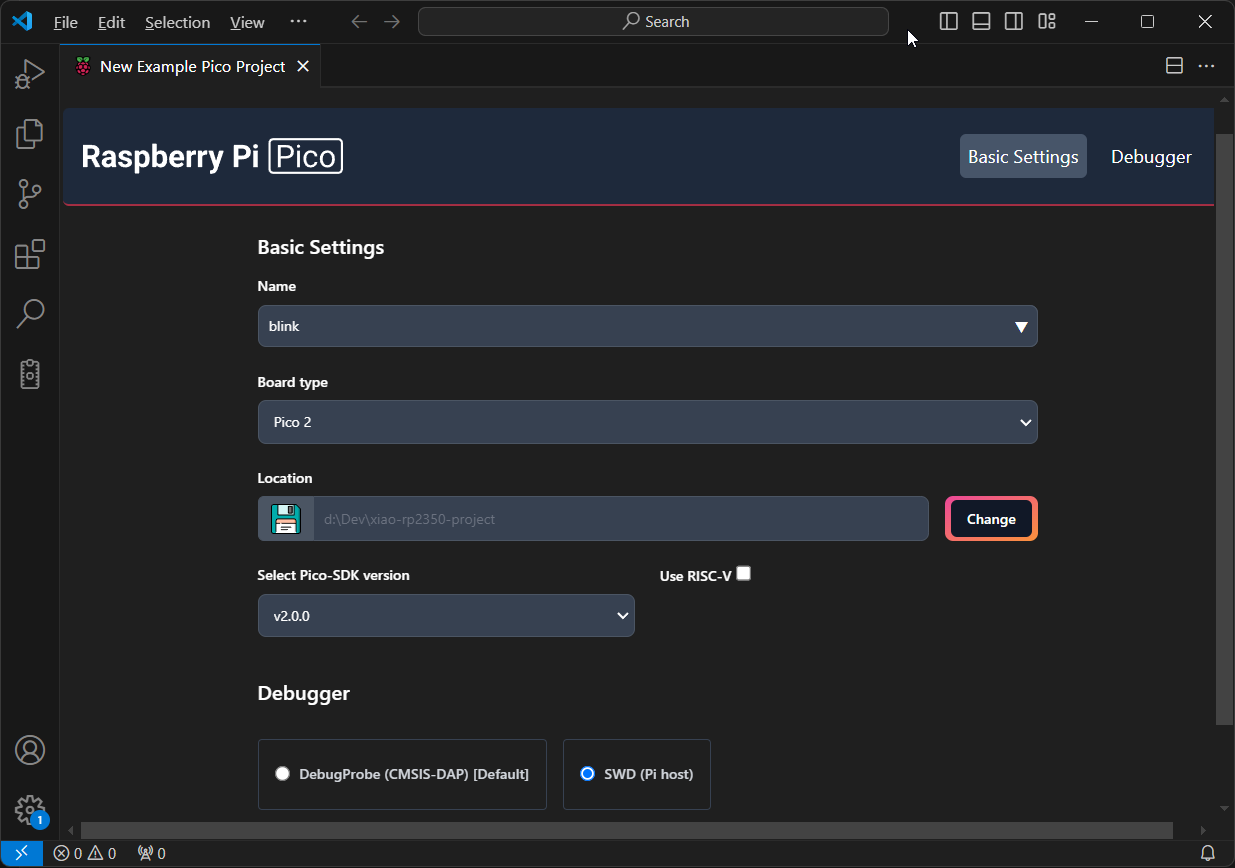
Paso 3: Configurar tu Proyecto
- Nombre: Típicamente, este será el nombre del proyecto de ejemplo; en este caso, elegiremos el proyecto
blink. - Tipo de Placa:
Pico 2 - Ubicación: Elige dónde quieres almacenar tu proyecto XIAO RP2350.
- Versión del SDK: Debe ser versión
v2.0.0o posterior. - Depurador: Si planeas usar la interfaz de depuración SWD, marca la opción SWD Debugger para habilitar la depuración más tarde.
- Configurar proyecto
- Opciones Avanzadas
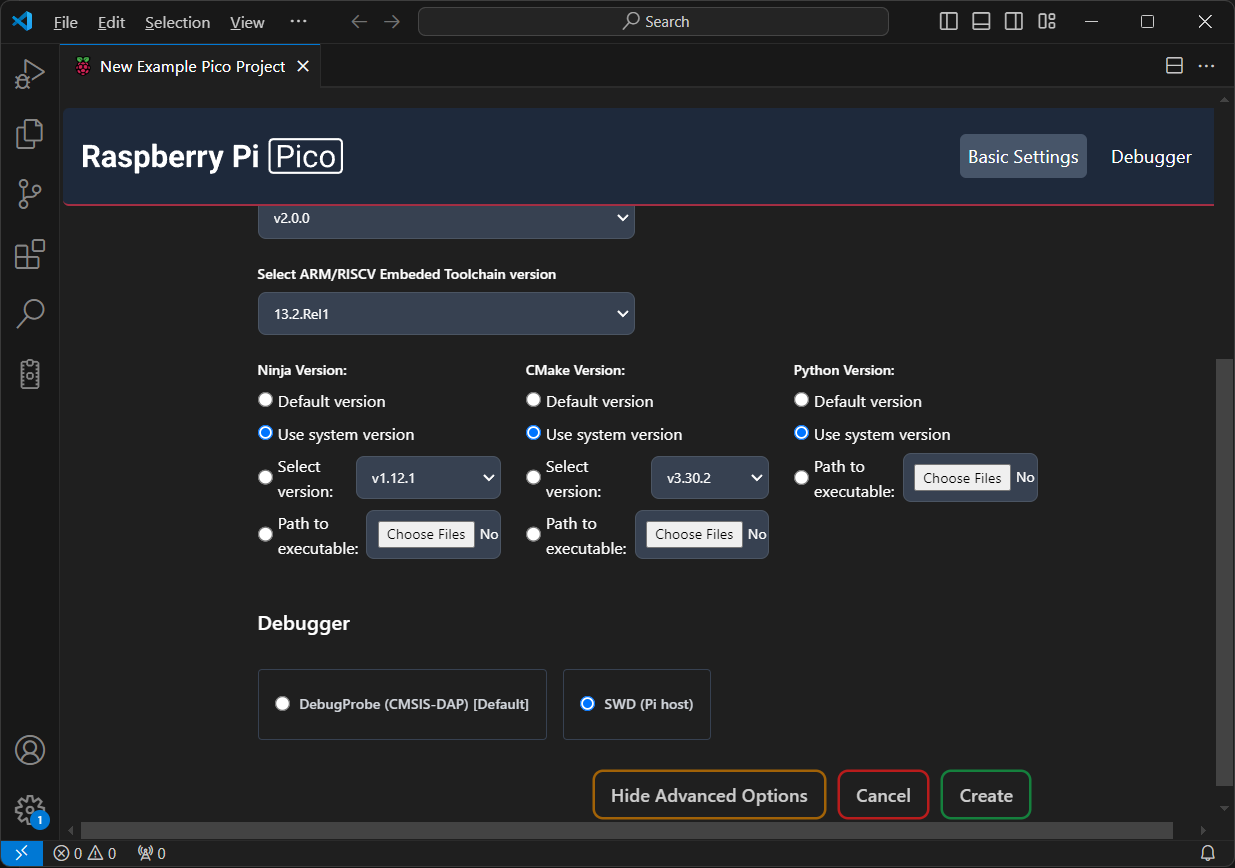
Si quieres ajustar finamente tu configuración de cadena de herramientas y evitar descargar recursos redundantes, marca las Opciones Avanzadas. Aquí, puedes especificar rutas para herramientas como Ninja y CMake. Si no has instalado previamente CMake o un entorno Python, o si prefieres no preocuparte por eso, puedes omitir este paso.
En este ejemplo, usaré las versiones del sistema ya instaladas en mi máquina Windows y agregadas al PATH del sistema. Por lo tanto, selecciono Use system version.
Si esta es tu primera vez ejecutando la configuración, cuando hagas clic en Create, la extensión descargará y gestionará el SDK por ti. En Windows, el SDK típicamente se colocará en %userprofile%.pico-sdk. El tiempo que toma configurar depende de tu velocidad de internet. Una vez completado, se abrirá una nueva ventana con tu proyecto.
Paso 4: Construir el Proyecto
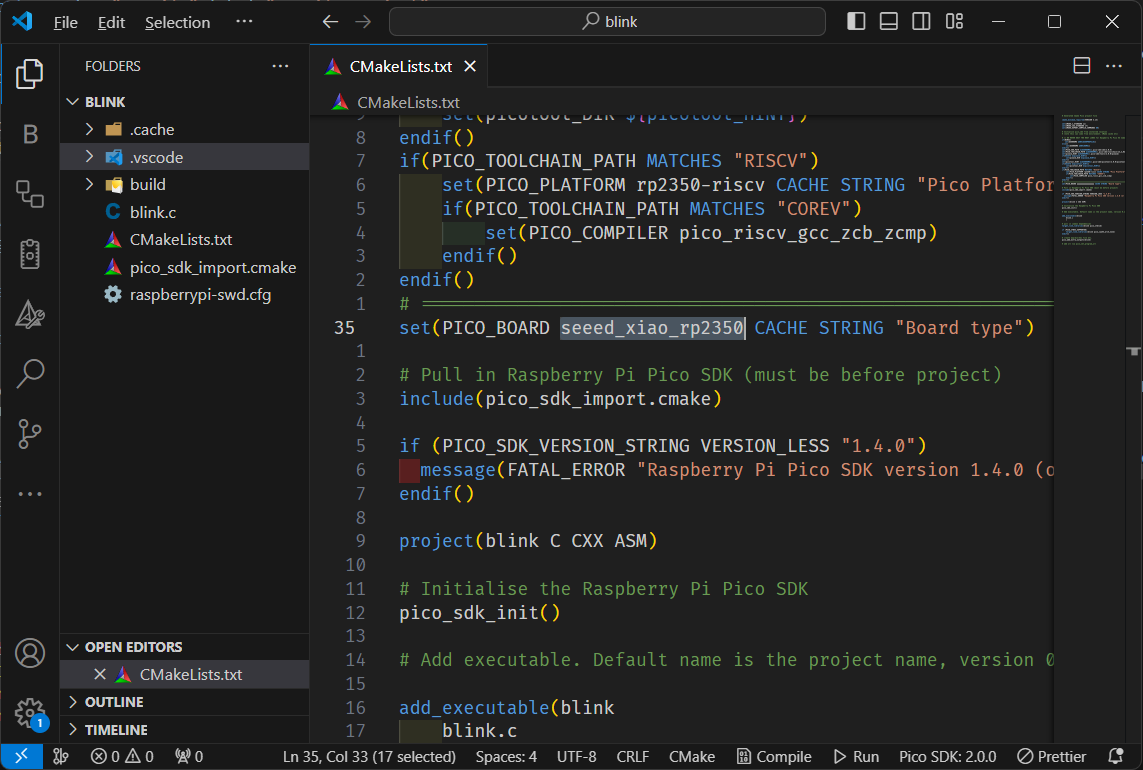
La primera vez que configures tu proyecto, necesitarás modificar manualmente el tipo de placa en el proyecto CMake porque la extensión no incluye la placa XIAO RP2350 por defecto. Establece la placa a seeed_xiao_rp2350 como se muestra a continuación:
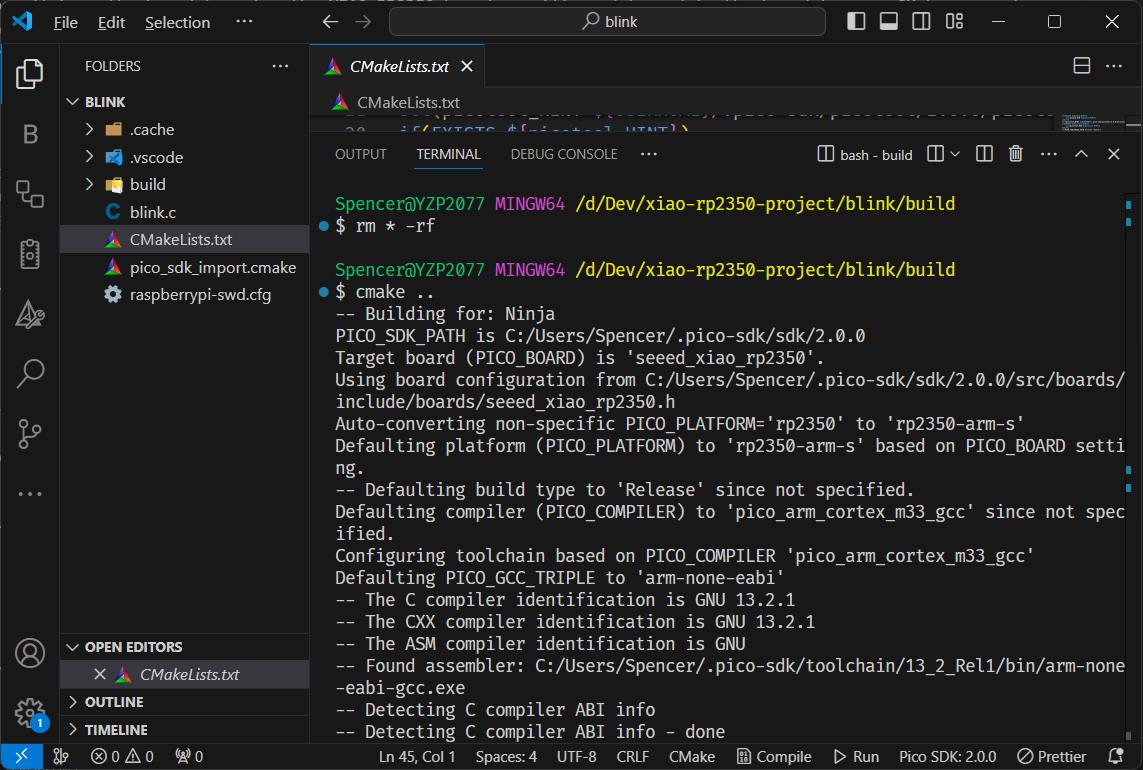
Después de modificar el tipo de placa, limpia la carpeta build para asegurar que use la configuración correcta de la placa desde %userprofile%/.pico-sdk/sdk/2.0.0/src/boards/include/boards/seeed_xiao_rp2350.h. Luego escribe los siguientes comandos para generar el caché de CMake en la carpeta build:
cmake .. # in build folder
Esto permitirá que la tarea de compilación de la extensión funcione correctamente.
- Compilar Proyecto
- Ejecutar Proyecto
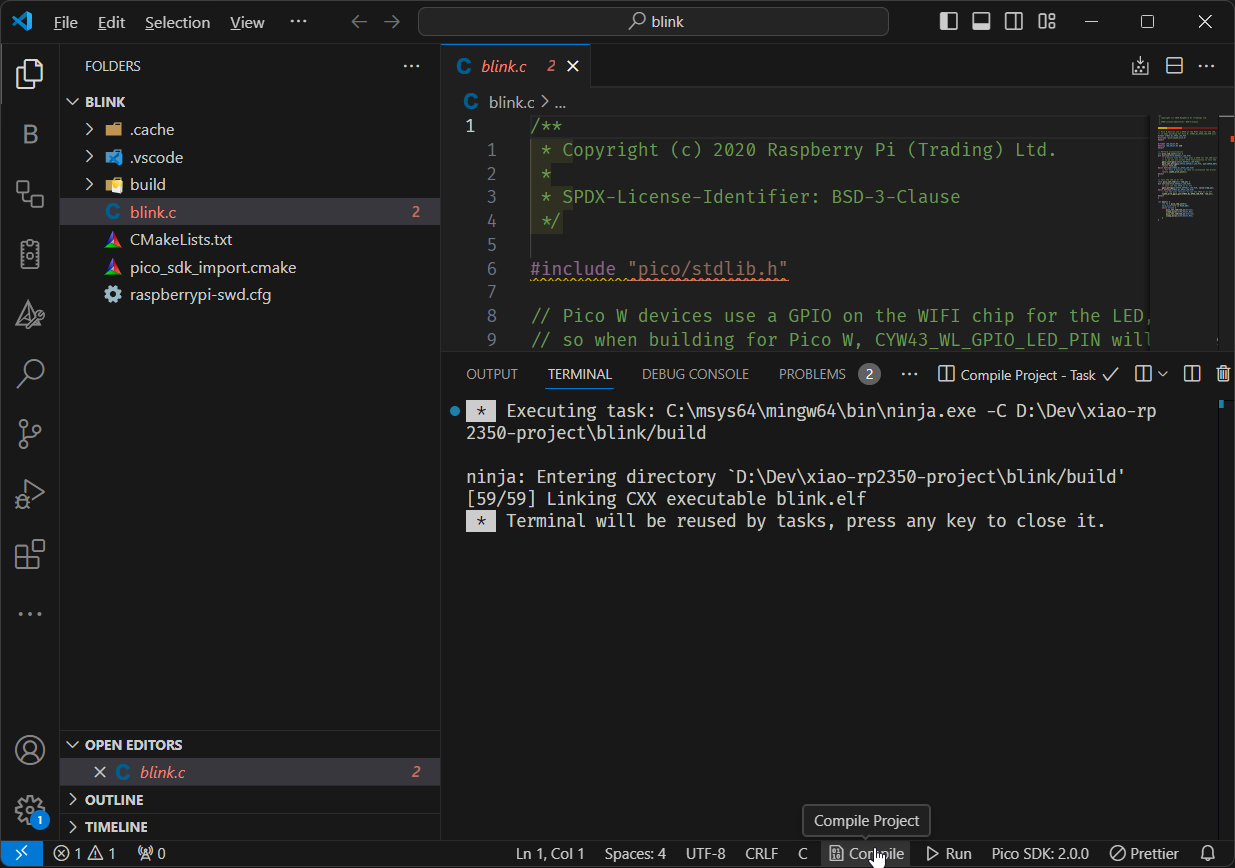
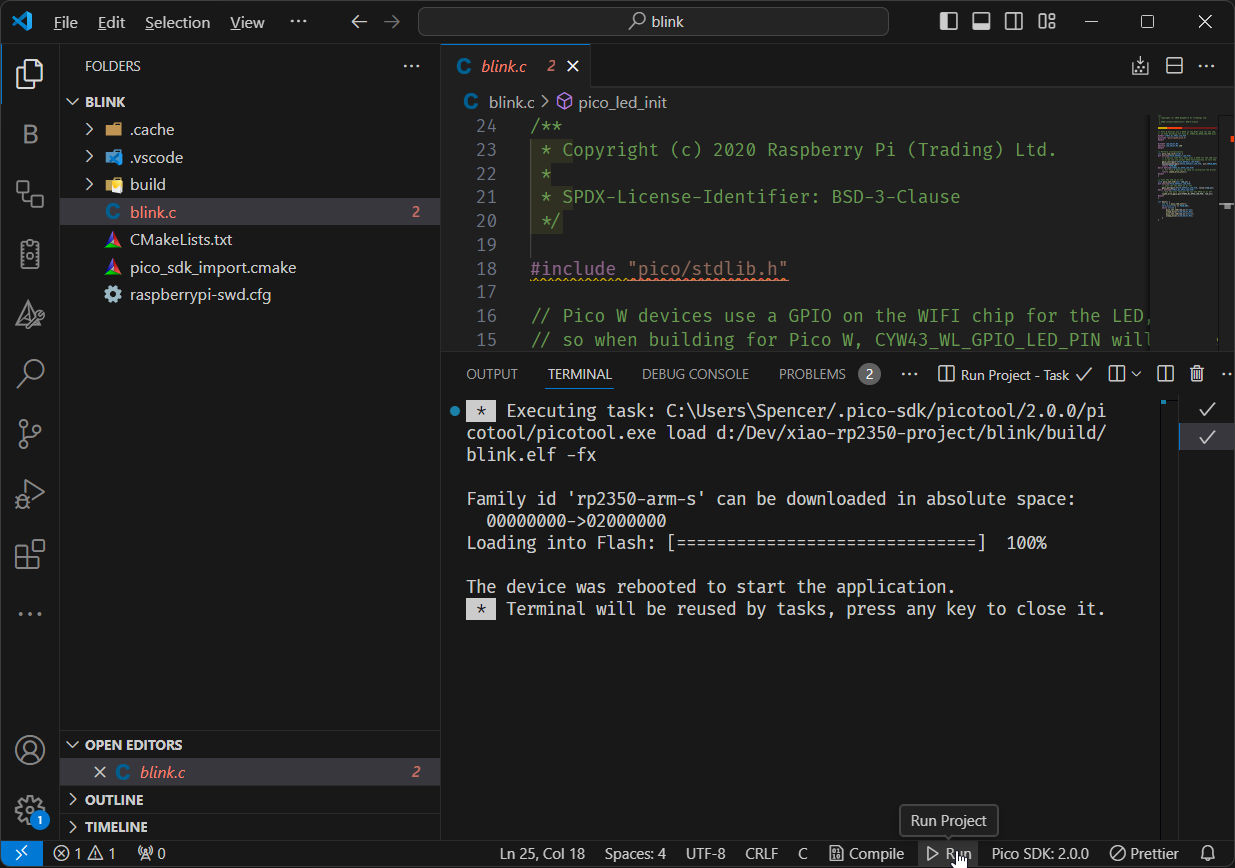
Ahora puedes presionar el botón Compile para construir el proyecto. Esto generará el archivo blink.uf2 en la carpeta build, que puedes arrastrar y soltar en la unidad RP2350 reconocida por tu computadora.
Si tu dispositivo está en modo BOOT, puedes presionar el botón Run para compilar y copiar automáticamente el archivo .uf2 al RP2350, eliminando la necesidad de arrastrar y soltar manualmente el archivo.
Acabamos de configurar el entorno de desarrollo y crear exitosamente un nuevo proyecto usando la extensión Raspberry Pi Pico para VSCode. Con el proyecto listo y tus herramientas configuradas, puedes compilar y ejecutar fácilmente tu código en el XIAO RP2350, optimizando tu proceso de desarrollo.
Ejemplo 1: Parpadeo de LED
Para demostrar el uso básico del SDK, el siguiente ejemplo detalla la programación del LED integrado para que parpadee:
#include "pico/stdlib.h"
const int sleep_time = 250;
int main() {
const uint LED_PIN = PICO_DEFAULT_LED_PIN; // GPIO25
gpio_init(LED_PIN);
gpio_set_dir(LED_PIN, GPIO_OUT);
while (true) {
gpio_put(LED_PIN, 1);
sleep_ms(sleep_time);
gpio_put(LED_PIN, 0);
sleep_ms(sleep_time);
}
}
Ejemplo 2: Parpadeo RGB
- ws2812.c
- ws2812.pio
- CMakeLists.txt
/**
* Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
#include <stdio.h>
#include <stdlib.h>
#include "pico/stdlib.h"
#include "hardware/pio.h"
#include "hardware/clocks.h"
#include "ws2812.pio.h"
#define IS_RGBW true
#define NUM_PIXELS 1
#ifdef PICO_DEFAULT_WS2812_PIN
#define WS2812_PIN PICO_DEFAULT_WS2812_PIN
#else
// default to pin 2 if the board doesn't have a default WS2812 pin defined
#define WS2812_PIN 22
#endif
static inline void put_pixel(uint32_t pixel_grb) {
pio_sm_put_blocking(pio0, 0, pixel_grb << 8u);
}
static inline uint32_t urgb_u32(uint8_t r, uint8_t g, uint8_t b) {
return
((uint32_t) (r) << 8) |
((uint32_t) (g) << 16) |
(uint32_t) (b);
}
void pattern_snakes(uint len, uint t) {
for (uint i = 0; i < len; ++i) {
uint x = (i + (t >> 1)) % 64;
if (x < 10)
put_pixel(urgb_u32(0xff, 0, 0));
else if (x >= 15 && x < 25)
put_pixel(urgb_u32(0, 0xff, 0));
else if (x >= 30 && x < 40)
put_pixel(urgb_u32(0, 0, 0xff));
else
put_pixel(0);
}
}
void pattern_random(uint len, uint t) {
if (t % 8)
return;
for (int i = 0; i < len; ++i)
put_pixel(rand());
}
void pattern_sparkle(uint len, uint t) {
if (t % 8)
return;
for (int i = 0; i < len; ++i)
put_pixel(rand() % 16 ? 0 : 0xffffffff);
}
void pattern_greys(uint len, uint t) {
int max = 100; // let's not draw too much current!
t %= max;
for (int i = 0; i < len; ++i) {
put_pixel(t * 0x10101);
if (++t >= max) t = 0;
}
}
typedef void (*pattern)(uint len, uint t);
const struct {
pattern pat;
const char *name;
} pattern_table[] = {
{pattern_snakes, "Snakes!"},
{pattern_random, "Random data"},
{pattern_sparkle, "Sparkles"},
{pattern_greys, "Greys"},
};
int main() {
//set_sys_clock_48();
stdio_init_all();
const int RGB_POWER = 23;
gpio_init(RGB_POWER);
gpio_set_dir(RGB_POWER, GPIO_OUT);
gpio_put(RGB_POWER, 1);
printf("WS2812 Smoke Test, using pin %d", WS2812_PIN);
// todo get free sm
PIO pio = pio0;
int sm = 0;
uint offset = pio_add_program(pio, &ws2812_program);
ws2812_program_init(pio, sm, offset, WS2812_PIN, 800000, IS_RGBW);
int t = 0;
while (1) {
int pat = rand() % count_of(pattern_table);
int dir = (rand() >> 30) & 1 ? 1 : -1;
puts(pattern_table[pat].name);
puts(dir == 1 ? "(forward)" : "(backward)");
for (int i = 0; i < 1000; ++i) {
pattern_table[pat].pat(NUM_PIXELS, t);
sleep_ms(10);
t += dir;
}
}
}
;
; Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
;
; SPDX-License-Identifier: BSD-3-Clause
;
.program ws2812
.side_set 1
.define public T1 2
.define public T2 5
.define public T3 3
.lang_opt python sideset_init = pico.PIO.OUT_HIGH
.lang_opt python out_init = pico.PIO.OUT_HIGH
.lang_opt python out_shiftdir = 1
.wrap_target
bitloop:
out x, 1 side 0 [T3 - 1] ; Side-set still takes place when instruction stalls
jmp !x do_zero side 1 [T1 - 1] ; Branch on the bit we shifted out. Positive pulse
do_one:
jmp bitloop side 1 [T2 - 1] ; Continue driving high, for a long pulse
do_zero:
nop side 0 [T2 - 1] ; Or drive low, for a short pulse
.wrap
% c-sdk {
#include "hardware/clocks.h"
static inline void ws2812_program_init(PIO pio, uint sm, uint offset, uint pin, float freq, bool rgbw) {
pio_gpio_init(pio, pin);
pio_sm_set_consecutive_pindirs(pio, sm, pin, 1, true);
pio_sm_config c = ws2812_program_get_default_config(offset);
sm_config_set_sideset_pins(&c, pin);
sm_config_set_out_shift(&c, false, true, rgbw ? 32 : 24);
sm_config_set_fifo_join(&c, PIO_FIFO_JOIN_TX);
int cycles_per_bit = ws2812_T1 + ws2812_T2 + ws2812_T3;
float div = clock_get_hz(clk_sys) / (freq * cycles_per_bit);
sm_config_set_clkdiv(&c, div);
pio_sm_init(pio, sm, offset, &c);
pio_sm_set_enabled(pio, sm, true);
}
%}
.program ws2812_parallel
.define public T1 2
.define public T2 5
.define public T3 3
.wrap_target
out x, 32
mov pins, !null [T1-1]
mov pins, x [T2-1]
mov pins, null [T3-2]
.wrap
% c-sdk {
#include "hardware/clocks.h"
static inline void ws2812_parallel_program_init(PIO pio, uint sm, uint offset, uint pin_base, uint pin_count, float freq) {
for(uint i=pin_base; i<pin_base+pin_count; i++) {
pio_gpio_init(pio, i);
}
pio_sm_set_consecutive_pindirs(pio, sm, pin_base, pin_count, true);
pio_sm_config c = ws2812_parallel_program_get_default_config(offset);
sm_config_set_out_shift(&c, true, true, 32);
sm_config_set_out_pins(&c, pin_base, pin_count);
sm_config_set_set_pins(&c, pin_base, pin_count);
sm_config_set_fifo_join(&c, PIO_FIFO_JOIN_TX);
int cycles_per_bit = ws2812_parallel_T1 + ws2812_parallel_T2 + ws2812_parallel_T3;
float div = clock_get_hz(clk_sys) / (freq * cycles_per_bit);
sm_config_set_clkdiv(&c, div);
pio_sm_init(pio, sm, offset, &c);
pio_sm_set_enabled(pio, sm, true);
}
%}
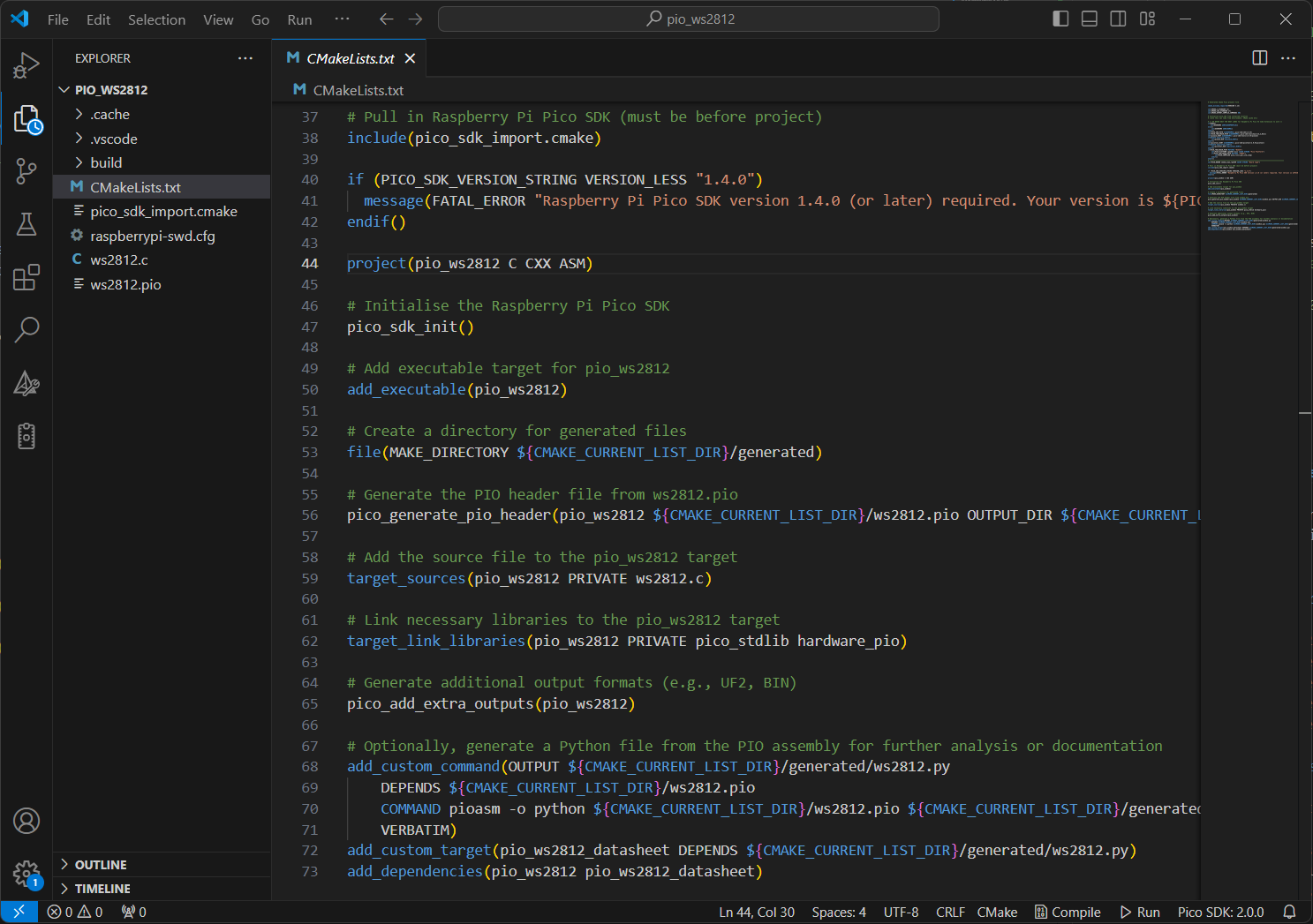
Copia el siguiente fragmento y añádelo a tu archivo CMakeLists.txt.
project(pio_ws2812 C CXX ASM)
# Initialise the Raspberry Pi Pico SDK
pico_sdk_init()
# Add executable target for pio_ws2812
add_executable(pio_ws2812)
# Create a directory for generated files
file(MAKE_DIRECTORY ${CMAKE_CURRENT_LIST_DIR}/generated)
# Generate the PIO header file from ws2812.pio
pico_generate_pio_header(pio_ws2812 ${CMAKE_CURRENT_LIST_DIR}/ws2812.pio OUTPUT_DIR ${CMAKE_CURRENT_LIST_DIR}/generated)
# Add the source file to the pio_ws2812 target
target_sources(pio_ws2812 PRIVATE ws2812.c)
# Link necessary libraries to the pio_ws2812 target
target_link_libraries(pio_ws2812 PRIVATE pico_stdlib hardware_pio)
# Generate additional output formats (e.g., UF2, BIN)
pico_add_extra_outputs(pio_ws2812)
# Optionally, generate a Python file from the PIO assembly for further analysis or documentation
add_custom_command(OUTPUT ${CMAKE_CURRENT_LIST_DIR}/generated/ws2812.py
DEPENDS ${CMAKE_CURRENT_LIST_DIR}/ws2812.pio
COMMAND pioasm -o python ${CMAKE_CURRENT_LIST_DIR}/ws2812.pio ${CMAKE_CURRENT_LIST_DIR}/generated/ws2812.py
VERBATIM)
add_custom_target(pio_ws2812_datasheet DEPENDS ${CMAKE_CURRENT_LIST_DIR}/generated/ws2812.py)
add_dependencies(pio_ws2812 pio_ws2812_datasheet)
Ejemplo 3: Impresión UART
Si deseas habilitar la salida de printf a tu computadora a través de USB, necesitarás configurar el archivo CMakeLists.txt de tu proyecto agregando la siguiente línea:
pico_enable_stdio_usb(your_project_name 1)
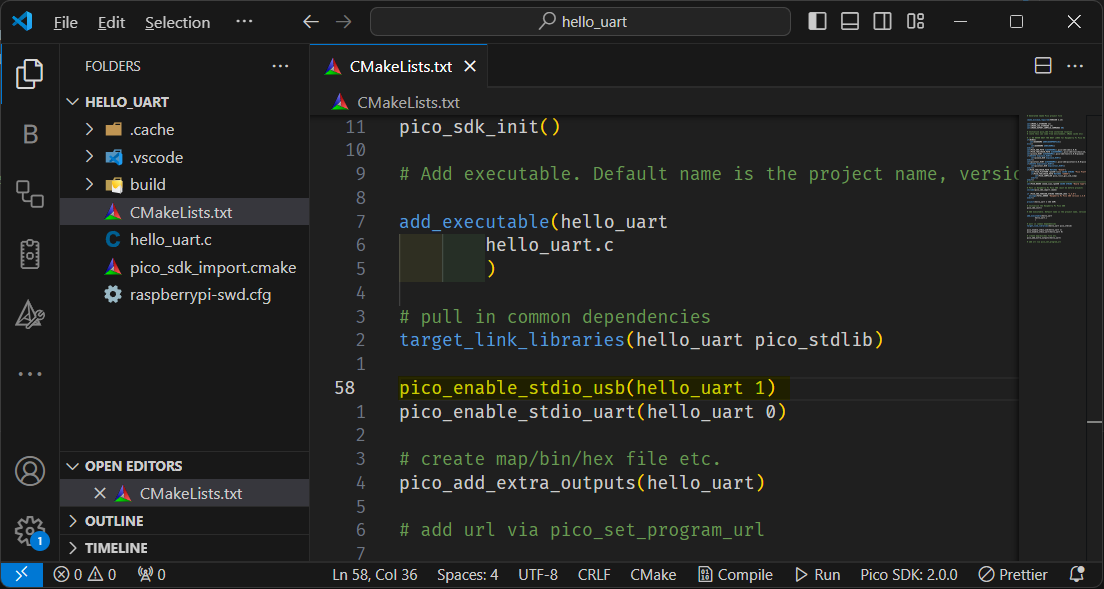
Además, asegúrate de inicializar la E/S estándar en tu código añadiendo stdio_init_all(); en tu función main.
#include "hardware/uart.h"
#include "pico/stdlib.h"
#include <pico/stdio.h>
#include <pico/time.h>
#include <stdio.h>
#define UART_ID uart0
#define BAUD_RATE 115200
// We are using pins 0 and 1, but see the GPIO function select table in the
// datasheet for information on which other pins can be used.
#define UART_TX_PIN 0
#define UART_RX_PIN 1
int main() {
stdio_init_all();
// Set up our UART with the required speed.
uart_init(UART_ID, BAUD_RATE);
// Set the TX and RX pins by using the function select on the GPIO
// Set datasheet for more information on function select
gpio_set_function(UART_TX_PIN, UART_FUNCSEL_NUM(UART_ID, UART_TX_PIN));
gpio_set_function(UART_RX_PIN, UART_FUNCSEL_NUM(UART_ID, UART_RX_PIN));
// Use some the various UART functions to send out data
// In a default system, printf will also output via the default UART
// Send out a character without any conversions
uart_putc_raw(UART_ID, 'A');
// Send out a character but do CR/LF conversions
uart_putc(UART_ID, 'B');
// Send out a string, with CR/LF conversions
uart_puts(UART_ID, " Hello, UART!\n");
// Print test
int i = 0;
for (;;) {
sleep_ms(500);
printf("Hello %d", i++);
}
}
Ejemplo 4: Leer Voltaje de Batería
#include <stdio.h>
#include "pico/stdlib.h"
#include "hardware/gpio.h"
#include "hardware/adc.h"
void init_gpio() {
const int gpio = 19;
gpio_init(gpio);
gpio_set_dir(gpio, GPIO_OUT);
gpio_put(gpio, 1);
}
int main() {
stdio_init_all();
printf("ADC battery Example - GPIO29 A3\n");
init_gpio();
adc_init();
// Make sure GPIO is high-impedance, no pullups etc
adc_gpio_init(29);
// Select ADC input 0 (GPIO26)
adc_select_input(3);
while (1) {
// 12-bit conversion, assume max value == ADC_VREF == 3.3 V
const float conversion_factor = 3.3f / (1 << 12);
uint16_t result = adc_read();
printf("Raw value: 0x%03x, voltage: %f V\n", result, result * conversion_factor * 2);
sleep_ms(500);
}
}
FAQ
Submódulo TinyUSB No Inicializado; Soporte USB No Disponible
Problema: Al compilar un proyecto, puedes ver esta advertencia:
TinyUSB submodule has not been initialized; USB support will be unavailable
Solución:
-
Abrir Terminal en Linux/macOS o Símbolo del sistema/PowerShell/Git Bash en Windows.
-
Navegar al directorio del Pico SDK:
cd /path/to/your/pico-sdk -
Inicializar el submódulo:
git submodule update --init
Esto habilitará el soporte USB en tu proyecto.
Recursos
- 🔗 [Enlace] Raspberry Pi Pico SDK | GitHub
- 📄 [PDF] Raspberry Pi Pico-series C/C++SDK el libro que documenta las APIs del SDK
- 📄 [PDF] Getting started with Raspberry Pi Pico-series - Documentación oficial de Raspberry Pi.
- 📽️ [Video] Intro to Raspberry Pi Pico and RP2040 - Un tutorial en video.
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarte diferentes tipos de soporte para asegurar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para satisfacer diferentes preferencias y necesidades.