Seeed Studio XIAO ESP32C3 con MicroPython

MicroPython es un intérprete de Python con una característica de compilación parcial de código nativo. Proporciona un subconjunto de características de Python 3.5, implementado para procesadores embebidos y sistemas con restricciones. Es diferente de CPython y puedes leer más sobre las diferencias aquí.
Instalando MicroPython
Instalar Esptool
Si aún no has instalado esptool.py, puedes hacerlo usando pip en tu pc:
pip install esptool
Descargar el firmware MicroPython para XIAO ESP32C3
Necesitas descargar el archivo binario del firmware desde micropython.org Después de descargar el archivo bin correcto, navega a la carpeta y abre una terminal cmd allí. Al momento de la versión final, la versión más reciente del archivo bin es:
ESP32_GENERIC_C3-20230602-v1.23.0.bin
Conecta el XIAO ESP32C3 a tu PC
Necesitas presionar y mantener presionado el botón BOOT en tu placa XIAO ESP32C3 para entrar al modo 'bootloader' mientras conectas el cable USB tipo C a tu pc.
Verificar puerto
Encuentra todos los dispositivos serie en tu pc.
- Linux
En Linux, puedes usar el comando dmesg para ver los dispositivos conectados:
dmesg | grep tty
Alternativamente, puedes listar dispositivos serie usando ls:
ls /dev/ttyS* /dev/ttyUSB*
- Windows
En Windows, puedes verificar los puertos serie a través del Administrador de dispositivos. Busca la sección "Puertos (COM y LPT)" para ver los puertos serie disponibles. También puedes usar el comando mode en el Símbolo del sistema para listar los puertos serie:
mode
- macOS
En macOS, puedes listar los puertos serie disponibles usando el comando ls:
ls /dev/cu*
Esto mostrará todos los dispositivos de puerto serie.

Si el puerto está ocupado, puedes usar el siguiente comando para encontrar y terminar cualquier proceso que esté usando el puerto (en macOS): Identificar procesos que usan el puerto:
lsof | grep port
Este comando lista archivos abiertos y busca cualquier proceso que use el puerto especificado. Encuentra el ID del proceso (PID) de la salida y termina el proceso:
kill -9 <PID>
Reemplaza PID con el ID de proceso real encontrado.
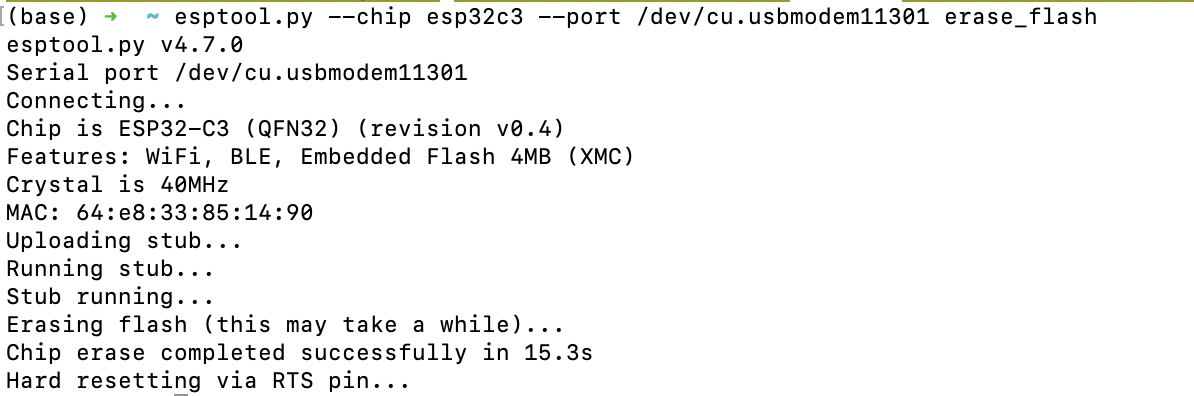
Borrar flash
esptool.py --chip esp32c3 --port /dev/cu.usbmodem11301 erase_flash
Reemplaza '/dev/cu.usbmodem11301' con el nombre de puerto correcto de tu sistema (por ejemplo, COM3 en Windows, /dev/ttyUSB0 en Linux).
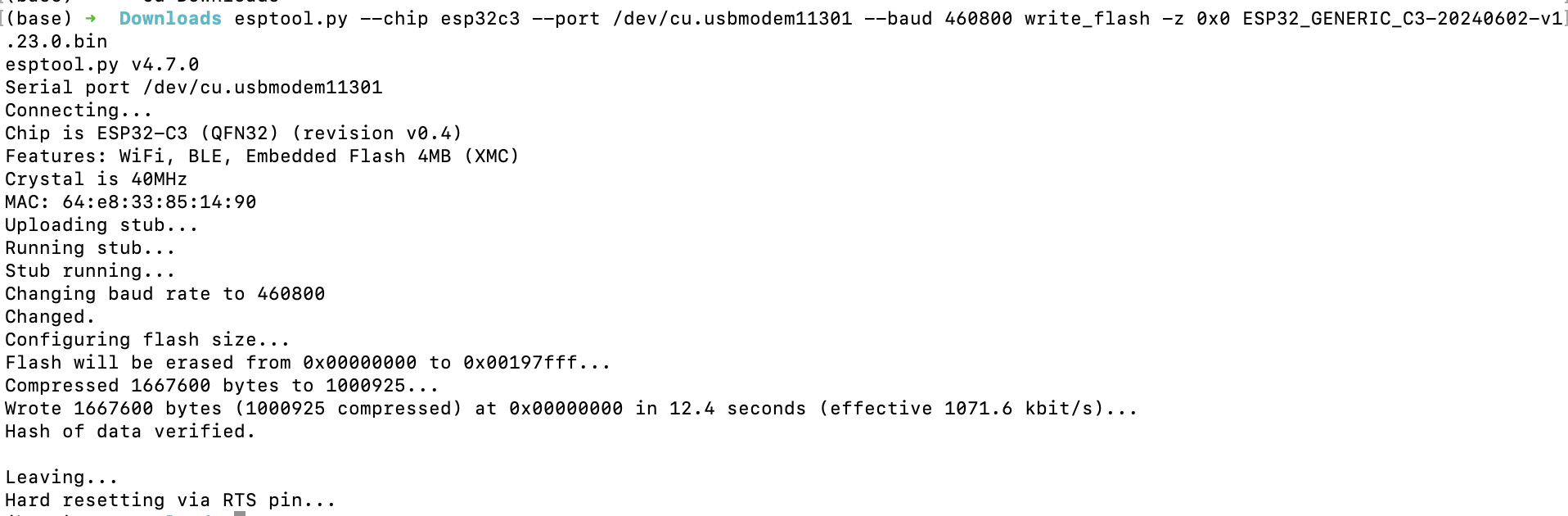
Escribir flash
Flashea el firmware en el XIAO ESP32C3:
esptool.py --chip esp32c3 --port /dev/cu.usbmodem11301 --baud 460800 write_flash -z 0x0 ESP32_GENERIC_C3-20240602-v1.23.0.bin
Nuevamente, reemplaza '/dev/cu.usbmodem11301' con el nombre de puerto correcto, y 'ESP32_GENERIC_C3-20240602-v1.23.0.bin' con la ruta a tu archivo de firmware en blanco.
¡Entonces puedes comenzar a compilar el script usando tu herramienta preferida para ESP32!
Editores Recomendados para MicroPython
Algunas de las herramientas populares se listan a continuación.
1. Thonny
Instala y abre thonny, luego configura Thonny siguiendo las instrucciones:
pip install thonny
#open thonny after installation
thonny
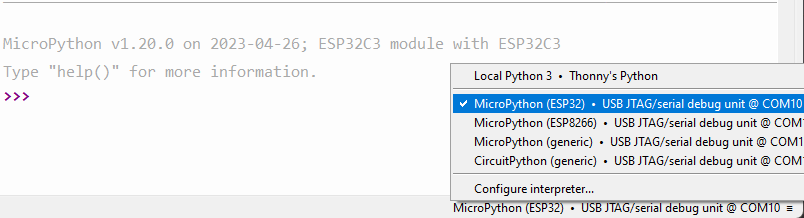
Ve a Run-->Configure Interpreter, y asegúrate de que la pestaña Interpreter en las opciones de Thonny se vea como se muestra a continuación, selecciona "CircuitPython (generic)" y puerto:
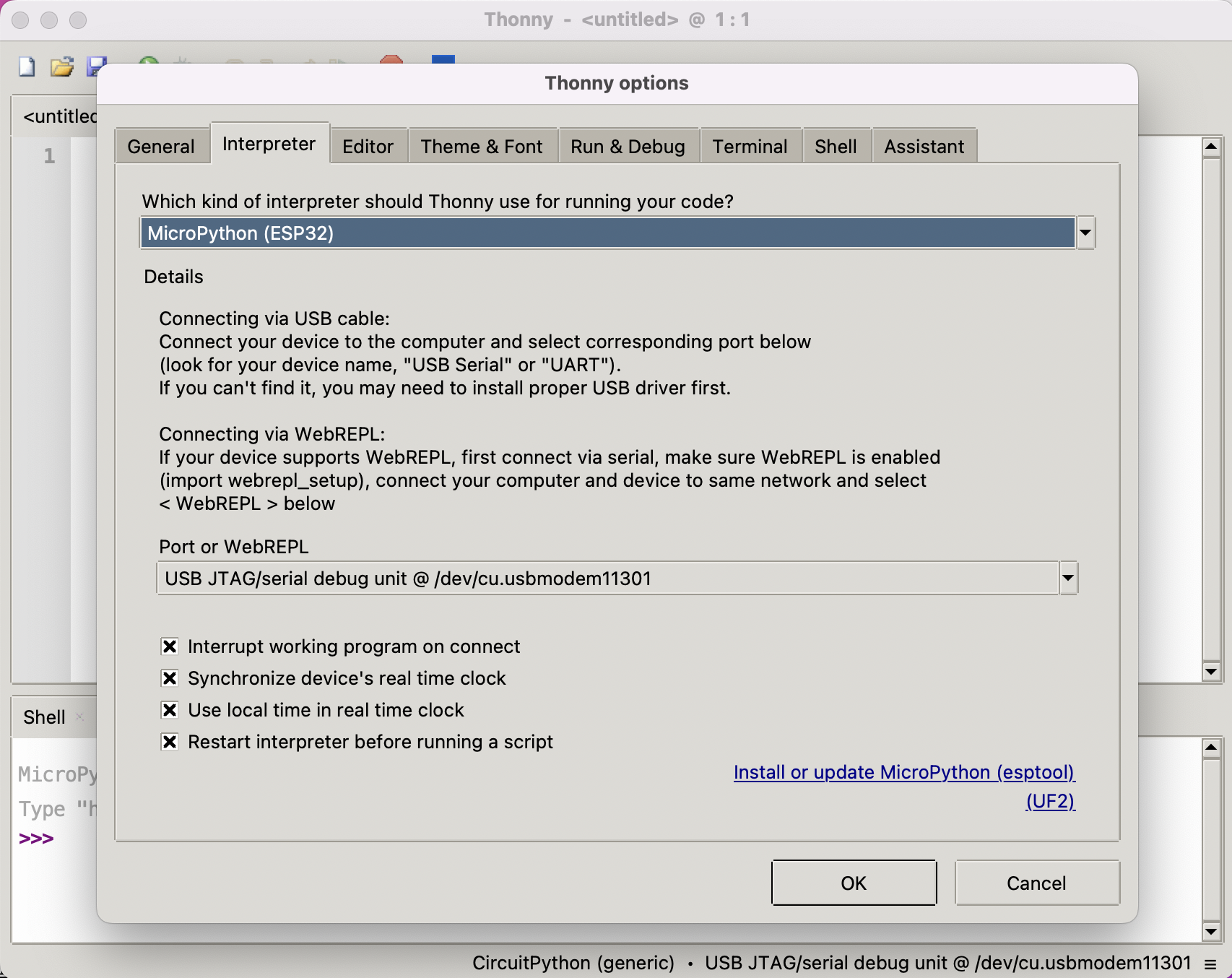
Haz clic en "OK" en el diálogo y deberías ver el shell de Micropython en la parte inferior de la ventana de thonny como se muestra en la figura a continuación. Ingresa el script línea por línea en el Shell para obtener el tamaño de flash y sram:
import gc
gc.mem_free()
import esp
esp.flash_size()
¡Felicidades por configurar exitosamente MicroPython en tu XIAO ESP32C3 con Thonny!
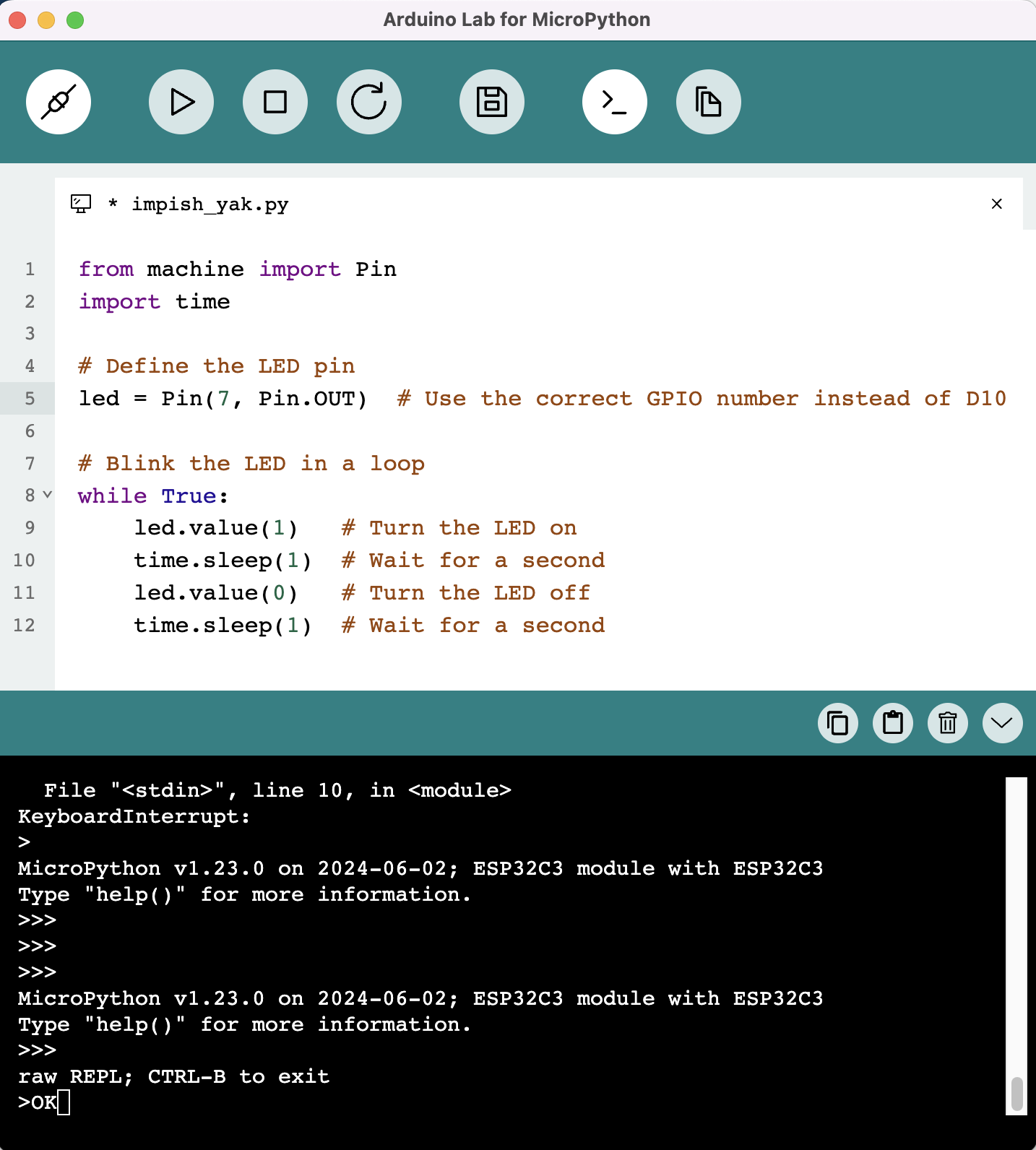
2. Arduino Lab para MicroPython
Descarga Arduino lab para MicroPython y conecta el dispositivo a tu PC.
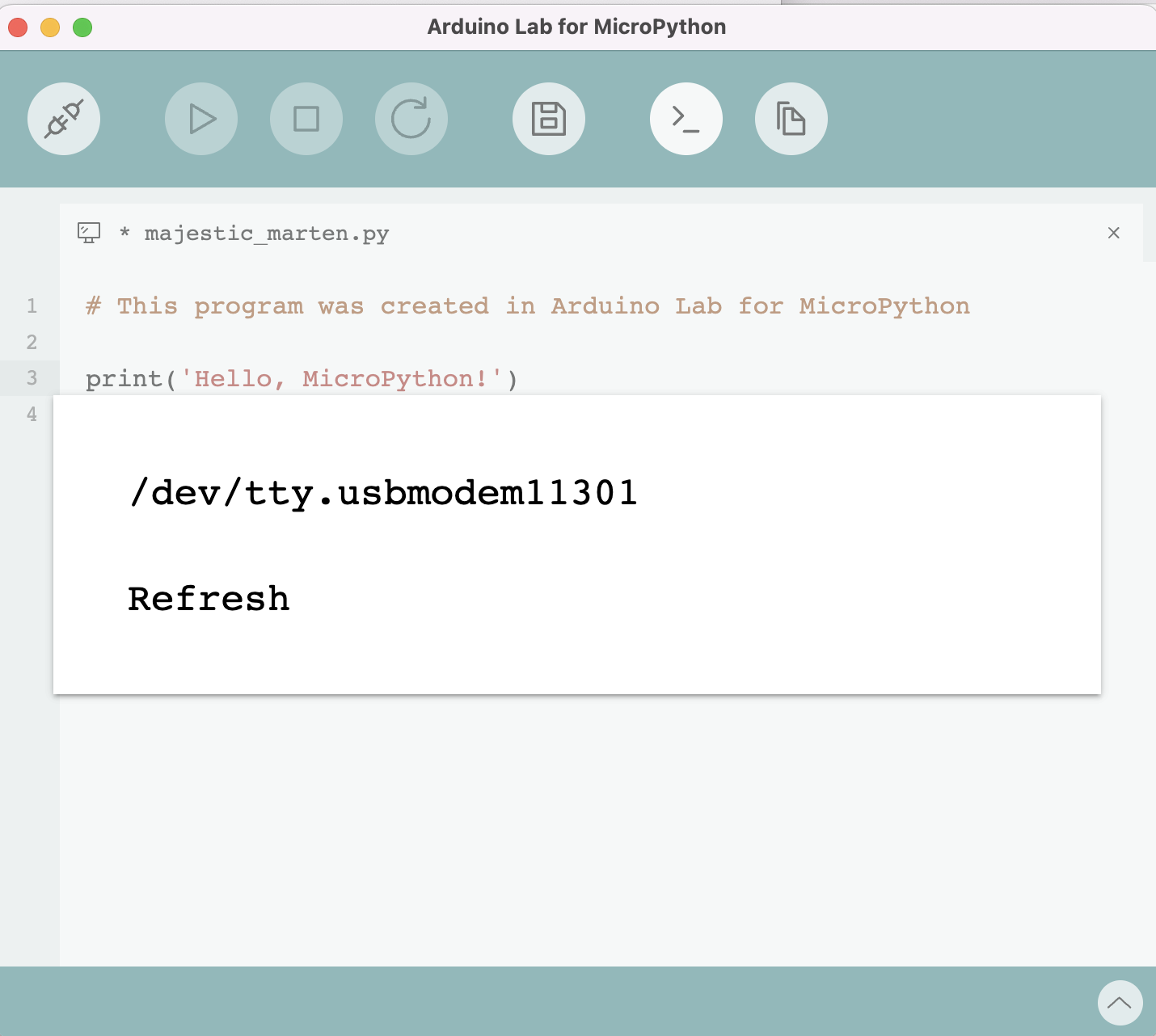
Código como este:
from machine import Pin
import time
# Define the LED pin
led = Pin(7, Pin.OUT) # Use the correct GPIO number instead of D10
# Blink the LED in a loop
while True:
led.value(1) # Turn the LED on
time.sleep(1) # Wait for a second
led.value(0) # Turn the LED off
time.sleep(1) # Wait for a second
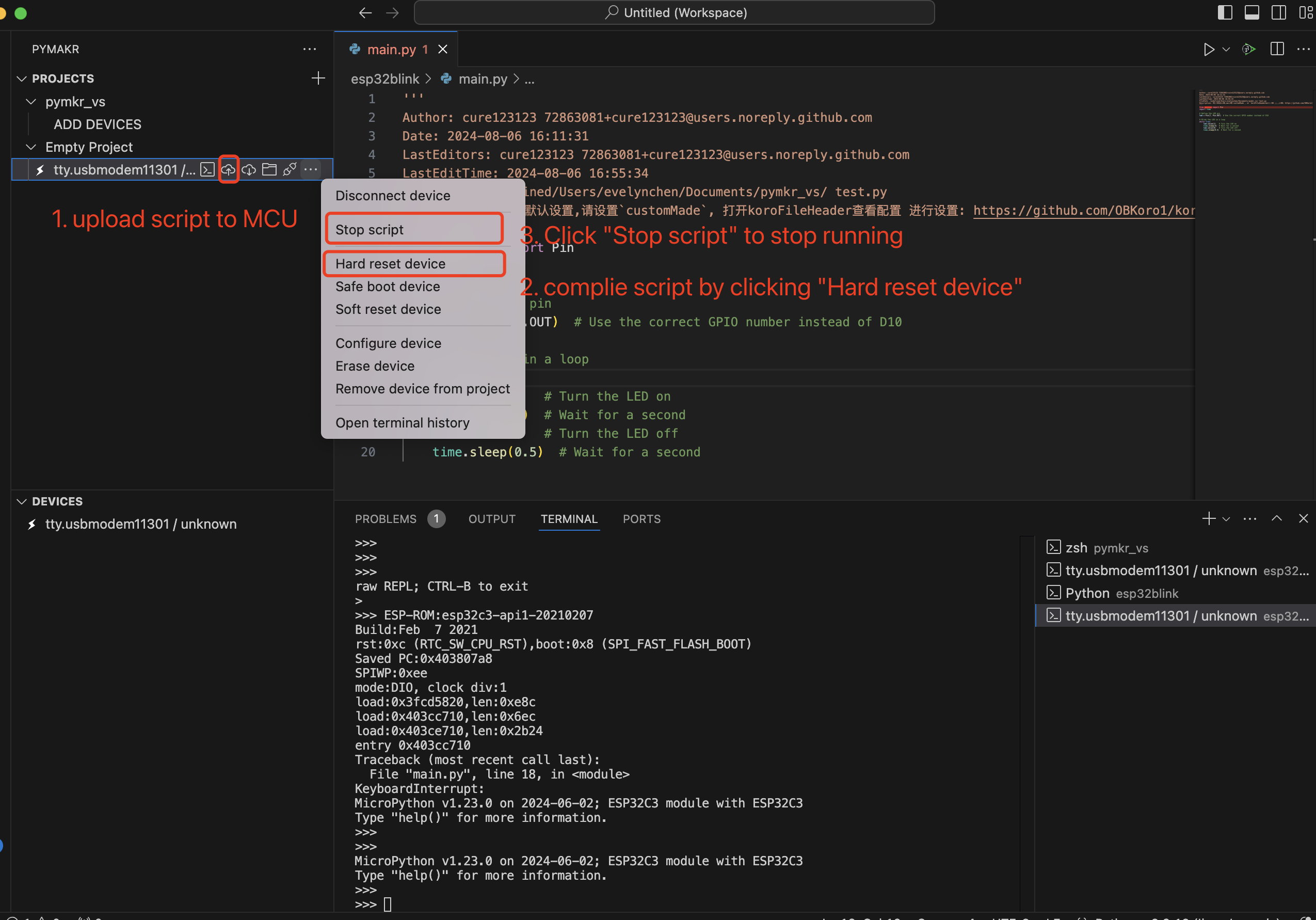
3. Pymakr en Visual Studio Code
- Instalar Pymakr Sigue las instrucciones de instalación para instalar Pymakr.
- Conecta tu XIAO ESP32C3 a tu computadora.
- Crear un Nuevo Proyecto Abre VS Code y crea un nuevo proyecto para tu microcontrolador.
- Añadir un Nuevo Archivo Python Crea un nuevo archivo Python dentro de tu proyecto.
- Subir Script al MCU y Compilar el Script
4. uPtCraft IDE
Información de Pinout/Puerto
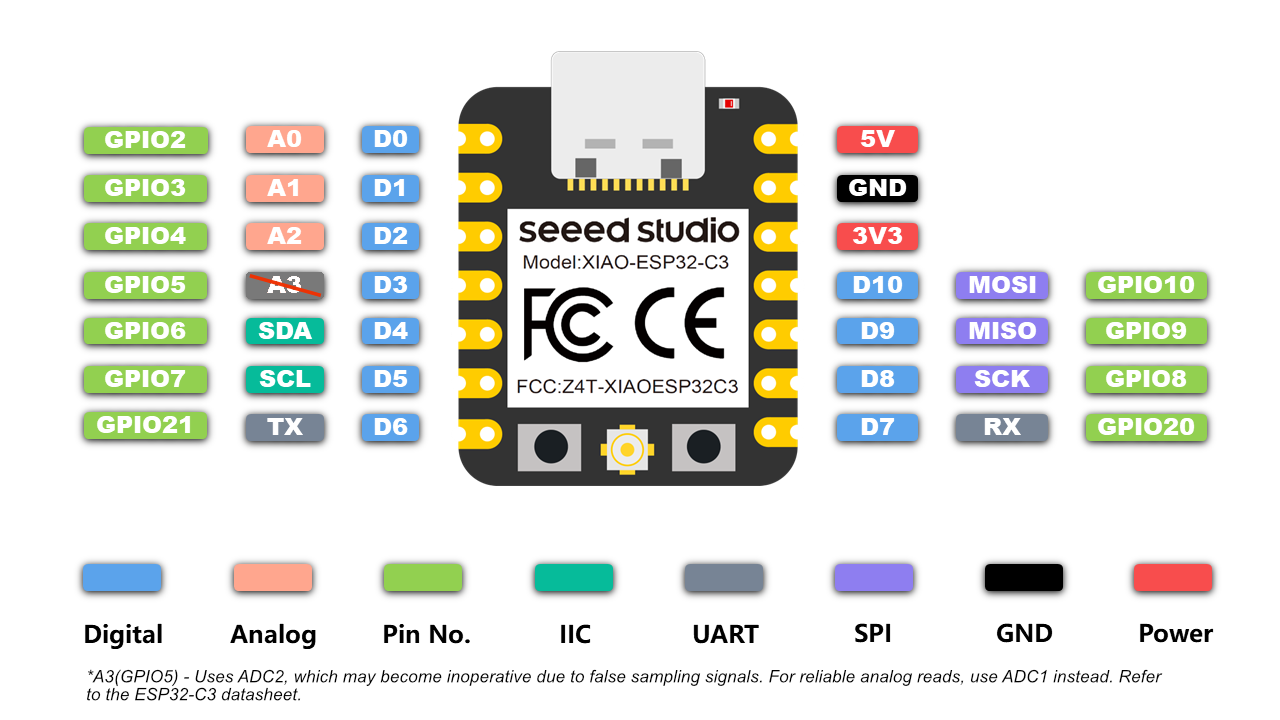
- Para más información, consulta la descripción general del hardware
- Esquemático del Seeed Studio XIAO ESP32C3
Comenzando con MicroPython en el XIAO ESP32C3
Aquí tienes una referencia rápida para la operación del ESP32 con micropython. Para más conocimiento sobre bibliotecas de micropython.
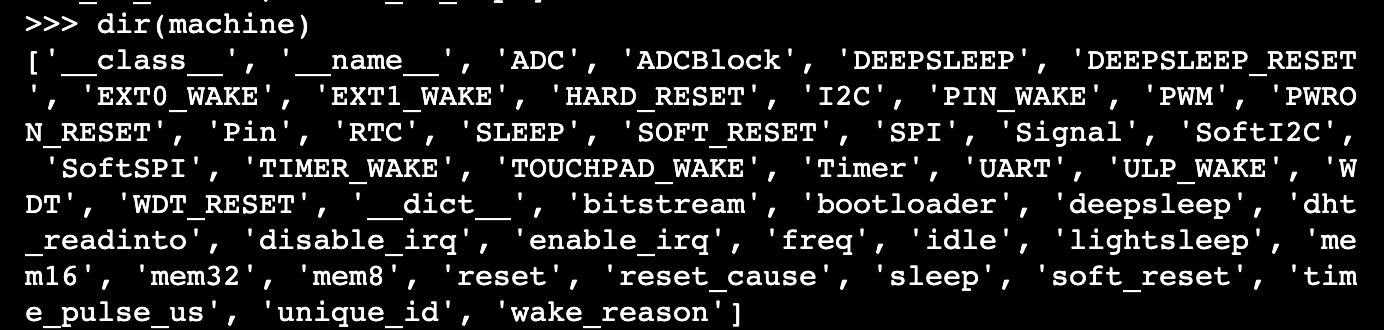
Control general de la placa
El REPL (Read-Eval-Print-Loop) de MicroPython está en UART0 (GPIO1=TX, GPIO3=RX) a una velocidad de baudios de 115200. La finalización con tabulador es útil para descubrir qué métodos tiene un objeto. El modo de pegado (ctrl-E) es útil para pegar un gran bloque de código Python en el REPL. Puedes usar la función dir() en MicroPython (similar en Python) para listar los atributos y métodos de un objeto. Por ejemplo, ingresa dir(machine) en el shell:
El módulo machine:
import machine
machine.freq() # get the current frequency of the CPU, for esp32c3 is 160000000
machine.freq(160000000) # set the CPU frequency to 160 MHz
El módulo esp:
import esp
esp.osdebug(None) # turn off vendor O/S debugging messages
esp.osdebug(0) # redirect vendor O/S debugging messages to UART(0)
# low level methods to interact with flash storage
esp.flash_size()
esp.flash_user_start()
esp.flash_erase(sector_no)
esp.flash_write(byte_offset, buffer)
esp.flash_read(byte_offset, buffer)
El módulo esp32: ESP32C3, ESP32S2, y ESP32S3 tienen un sensor de temperatura interno disponible y devuelve la temperatura en Celsius:
import esp32
esp32.mcu_temperature() # read the internal temperature of the MCU, in Celsius
Network-WLAN
El módulo Network: Más información consulte aquí.
import network
wlan = network.WLAN(network.STA_IF) # create station interface
wlan.active(True) # activate the interface
wlan.scan() # scan for access points
wlan.isconnected() # check if the station is connected to an AP
wlan.connect('ssid', 'key') # connect to an AP
wlan.config('mac') # get the interface's MAC address
wlan.ifconfig() # get the interface's IPv4 addresses
ap = network.WLAN(network.AP_IF) # create access-point interface
ap.config(ssid='ESP-AP') # set the SSID of the access point
ap.config(max_clients=10) # set how many clients can connect to the network
ap.active(True) # activate the interface
Una función útil para conectarse a tu red WiFi local es:
def do_connect():
import network
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
if not wlan.isconnected():
print('connecting to network...')
wlan.connect('ssid', 'key') #replace the ssid and key
while not wlan.isconnected():
pass
print('network config:', wlan.ifconfig())
Retraso y temporización
El módulo time:
import time
time.sleep(1) # sleep for 1 second
time.sleep_ms(500) # sleep for 500 milliseconds
time.sleep_us(10) # sleep for 10 microseconds
start = time.ticks_ms() # get millisecond counter
delta = time.ticks_diff(time.ticks_ms(), start) # compute time difference
Temporizadores
El puerto ESP32 tiene cuatro temporizadores de hardware. Usa la clase con un ID de temporizador del 0 al 3 (inclusive):
from machine import Timer
tim0 = Timer(0)
tim0.init(period=5000, mode=Timer.ONE_SHOT, callback=lambda t:print(0))
tim1 = Timer(1)
tim1.init(period=2000, mode=Timer.PERIODIC, callback=lambda t:print(1))
El período está en milisegundos. Los temporizadores virtuales no están soportados actualmente en este puerto.
Pines y GPIO
La clase machine.Pin:
from machine import Pin
p2 = Pin(2, Pin.OUT) # create output pin on GPIO2
p2.on() # set pin to "on" (high) level
p2.off() # set pin to "off" (low) level
p2.value(1) # set pin to on/high
p3 = Pin(3, Pin.IN) # create input pin on GPIO3
print(p3.value()) # get value, 0 or 1
p4 = Pin(4, Pin.IN, Pin.PULL_UP) # enable internal pull-up resistor
p5 = Pin(5, Pin.OUT, value=1) # set pin high on creation
p6 = Pin(6, Pin.OUT, drive=Pin.DRIVE_3) # set maximum drive strength
Los pines disponibles son de los siguientes rangos (inclusive): 2,3,4,5,6,7,8,9,10,20,21. Estos corresponden a los números de pin GPIO reales del chip ESP32C3.
UART(bus serie)
La clase machine.UART:
from machine import UART
uart1 = UART(1, baudrate=9600, tx=21, rx=20)
uart1.write('hello') # write 5 bytes
uart1.read(5) # read up to 5 bytes
El ESP32C3 tiene un UART por hardware. Los pines se listan a continuación:
| UART | Pin |
|---|---|
| TX | 21 |
| RX | 20 |
PWM(modulación por ancho de pulso)
PWM puede habilitarse en todos los pines con salida habilitada. La frecuencia base puede variar de 1Hz a 40MHz pero hay un compromiso; a medida que la frecuencia base aumenta, la resolución del ciclo de trabajo disminuye. La clase machine.PWM:
from machine import Pin, PWM
pwm2 = PWM(Pin(2), freq=5000, duty_u16=32768) # create PWM object from a pin
freq = pwm2.freq() # get current frequency
pwm2.freq(1000) # set PWM frequency from 1Hz to 40MHz
duty = pwm2.duty() # get current duty cycle, range 0-1023 (default 512, 50%)
pwm2.duty(256) # set duty cycle from 0 to 1023 as a ratio duty/1023, (now 25%)
duty_u16 = pwm2.duty_u16() # get current duty cycle, range 0-65535
pwm2.duty_u16(2**16*3//4) # set duty cycle from 0 to 65535 as a ratio duty_u16/65535, (now 75%)
duty_ns = pwm2.duty_ns() # get current pulse width in ns
pwm2.duty_ns(250_000) # set pulse width in nanoseconds from 0 to 1_000_000_000/freq, (now 25%)
pwm2.deinit() # turn off PWM on the pin
pwm3 = PWM(Pin(3), freq=20000, duty=512) # create and configure in one go
print(pwm3) # view PWM settings
Los chips ESP tienen diferentes periféricos de hardware:
| Especificación de Hardware | ESP32C3 | ESP32 |
|---|---|---|
| Número de grupos (modos de velocidad) | 1 | 2 |
| Número de temporizadores por grupo | 4 | 4 |
| Número de canales por grupo | 6 | 8 |
| Diferentes frecuencias PWM (grupos * temporizadores) | 4 | 8 |
| Total de canales PWM (Pines, ciclos de trabajo) (grupos * canales) | 6 | 16 |
ADC(conversión analógica a digital)
En XIAO ESP32C3, la funcionalidad ADC está disponible en los pines 2,3,4.
A3(GP105) - Usa ADC2, que puede volverse inoperativo debido a señales de muestreo falsas. Para lecturas analógicas, usa ADC1(A0/A1/A2) en su lugar. Consulta la hoja de datos del XIAO ESP32C3.
La clase machine.ADC:
from machine import ADC
adc = ADC(pin) # create an ADC object acting on a pin
val = adc.read_u16() # read a raw analog value in the range 0-65535
val = adc.read_uv() # read an analog value in microvolts
SPI
Bus SPI por software
El SPI por software (usando bit-banging) funciona en todos los pines, y se accede a través de la clase machine.SoftSPI:
from machine import Pin, SoftSPI
# construct a SoftSPI bus on the given pins
# polarity is the idle state of SCK
# phase=0 means sample on the first edge of SCK, phase=1 means the second
spi = SoftSPI(baudrate=100000, polarity=1, phase=0, sck=Pin(2), mosi=Pin(4), miso=Pin(6))
spi.init(baudrate=200000) # set the baudrate
spi.read(10) # read 10 bytes on MISO
spi.read(10, 0xff) # read 10 bytes while outputting 0xff on MOSI
buf = bytearray(50) # create a buffer
spi.readinto(buf) # read into the given buffer (reads 50 bytes in this case)
spi.readinto(buf, 0xff) # read into the given buffer and output 0xff on MOSI
spi.write(b'12345') # write 5 bytes on MOSI
buf = bytearray(4) # create a buffer
spi.write_readinto(b'1234', buf) # write to MOSI and read from MISO into the buffer
spi.write_readinto(buf, buf) # write buf to MOSI and read MISO back into buf
Bus SPI por hardware
Se accede al SPI por hardware a través de la clase machine.SPI y tiene los mismos métodos que el SPI por software mencionado anteriormente:
from machine import Pin, SPI
hspi = SPI(1, 10000000)
hspi = SPI(1, 10000000, sck=Pin(8), mosi=Pin(10), miso=Pin(9))
| SPI | Pin |
|---|---|
| SCK | D8 |
| MOSI | D10 |
| MISO | D9 |
I2C
Bus I2C por software
El I2C por software (usando bit-banging) funciona en todos los pines capaces de salida, y se accede a través de la clase machine.SoftI2C:
from machine import Pin, SoftI2C
i2c = SoftI2C(scl=Pin(7), sda=Pin(6), freq=100000)
i2c.scan() # scan for devices
i2c.readfrom(0x3a, 4) # read 4 bytes from device with address 0x3a
i2c.writeto(0x3a, '12') # write '12' to device with address 0x3a
buf = bytearray(10) # create a buffer with 10 bytes
i2c.writeto(0x3a, buf) # write the given buffer to the peripheral
Bus I2C por hardware
Se accede al controlador a través de la clase machine.I2C y tiene los mismos métodos que el I2C por software mencionado anteriormente:
from machine import Pin, I2C
i2c = I2C(0, scl=Pin(7), sda=Pin(6), freq=400000)
| I2C | GPIO | Pin |
|---|---|---|
| SCL | GPIO7 | D5 |
| SDA | GPIO6 | D4 |
Placa de Expansión Base para XIAO
Prerrequisitos:
| XIAO ESP32C3 con header soldado | Placa de Expansión Base para XIAO | Sensor de luz Grove |
|---|---|---|
 |  |  |
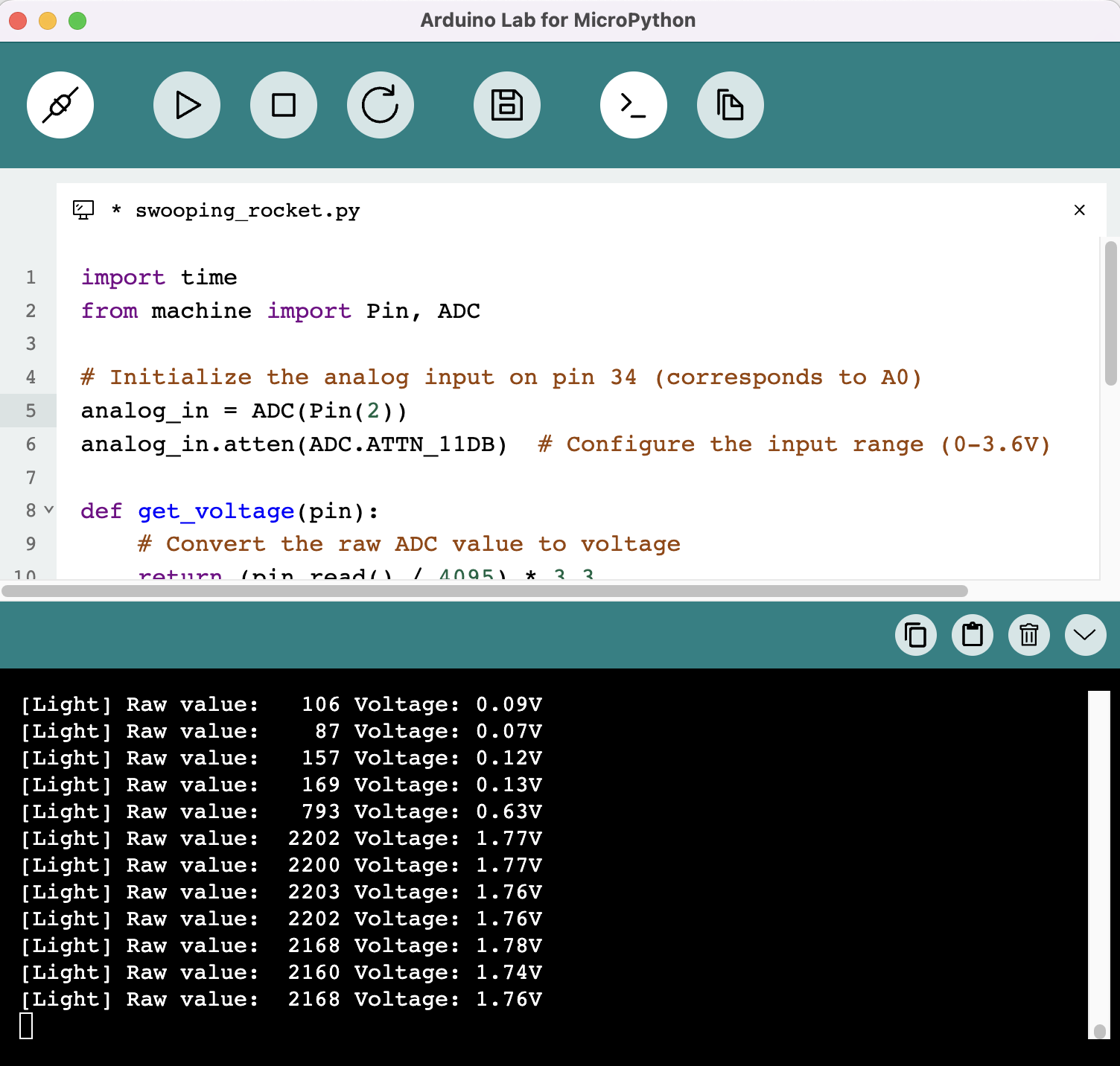
Leer los datos del sensor de luz
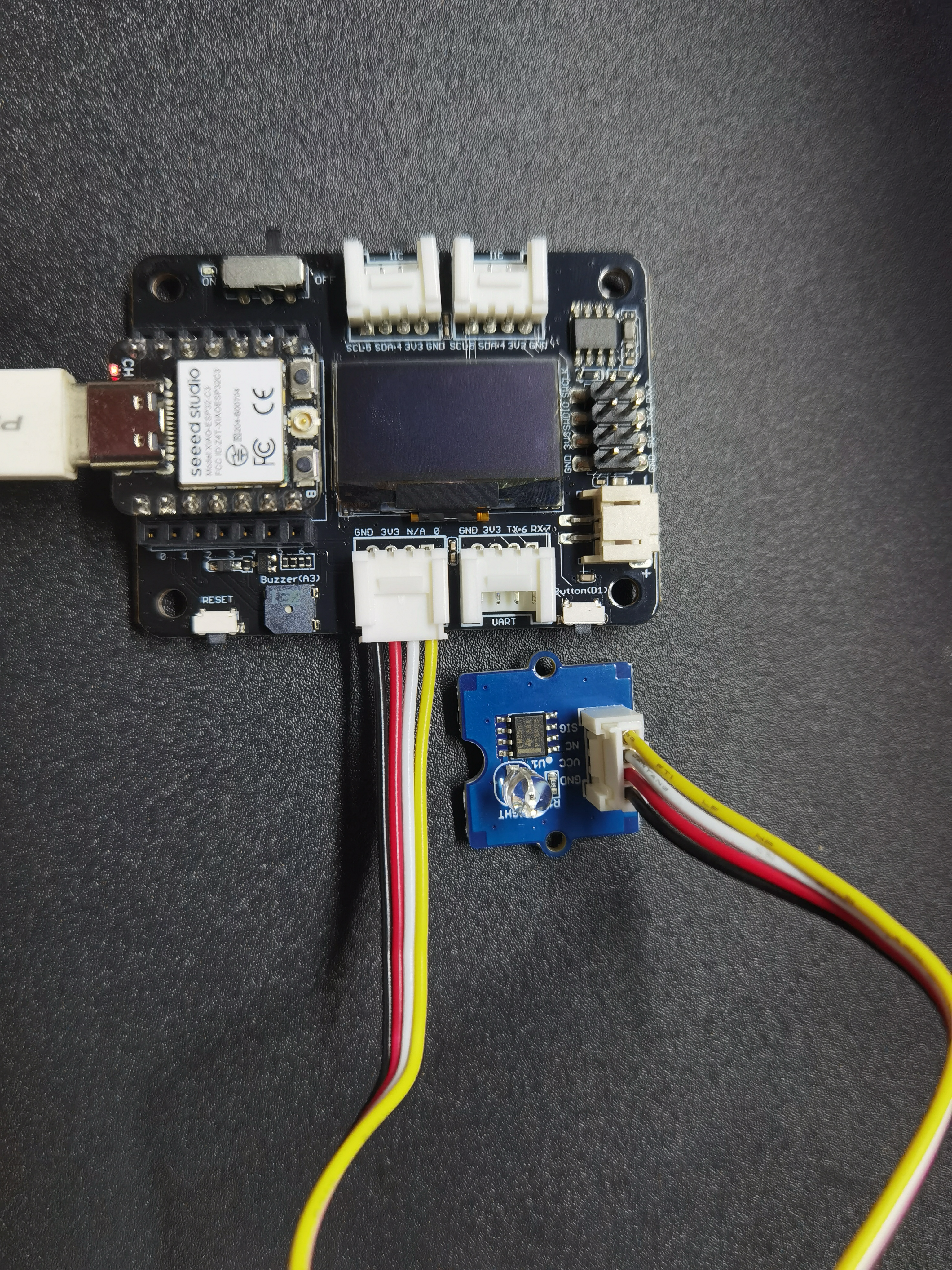
import time
from machine import Pin, ADC
# Initialize the analog input on pin 2 (corresponds to A0)
analog_in = ADC(Pin(2))
analog_in.atten(ADC.ATTN_11DB) # Configure the input range (0-3.6V)
def get_voltage(pin):
# Convert the raw ADC value to voltage
return (pin.read() / 4095) * 3.3
while True:
# Read the raw analog value
raw_value = analog_in.read()
# Convert the raw value to voltage
voltage = get_voltage(analog_in)
# Print the raw value and voltage to the serial console
print("[Light] Raw value: {:5d} Voltage: {:.2f}V".format(raw_value, voltage))
# Delay for a short period of time before reading again
time.sleep(1)
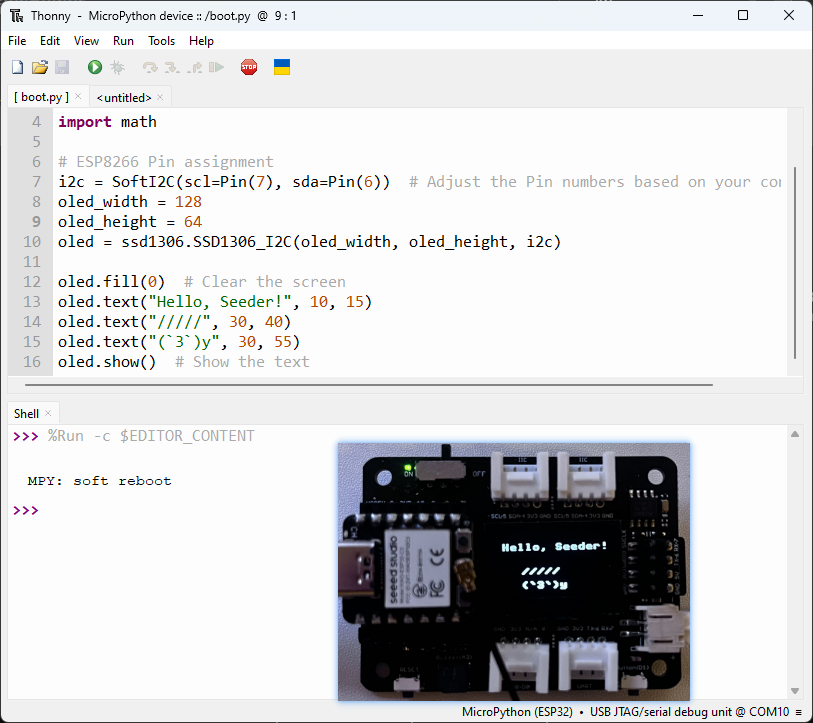
Encender la pantalla OLED
Conecta tu XIAO ESP32C3, abre Thonny y haz clic en la parte inferior derecha para configurar el intérprete Selecciona intérprete- Micropython (ESP32) y Puerto >>> Haz clic en OK
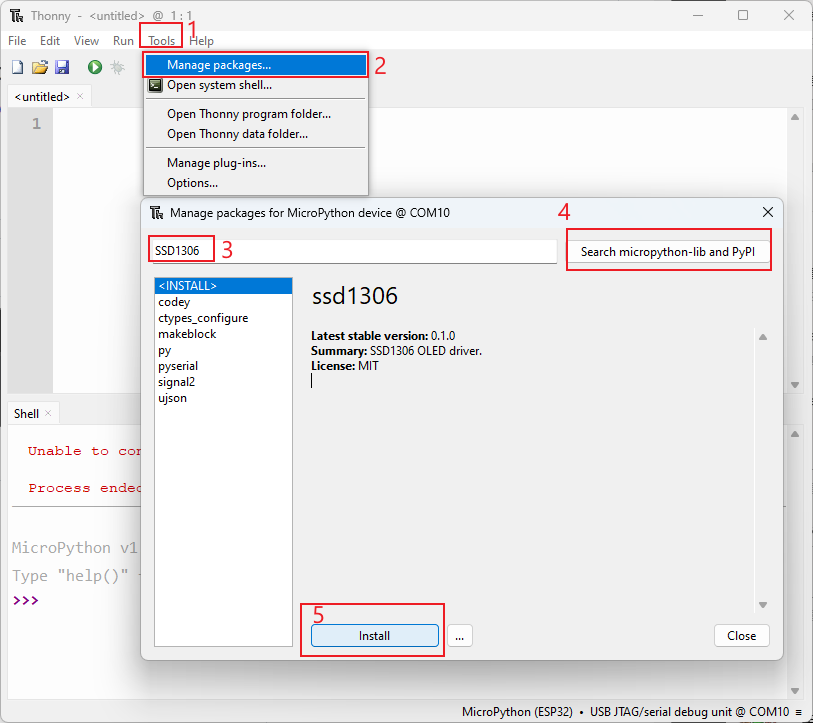
Si todo va bien, verás la salida en el shell Instala las librerías requeridas Haz clic en "Tools" >>> Haz clic en "Management Packages" >>> Ingresa el nombre de la librería >>> Haz clic en "Search micropython-lib and PyPl"
Ejecuta el script y grábalo en la placa. Después de terminar de codificar, haz clic en el botón verde para ejecutar el script.
import time
from machine import Pin, SoftI2C
import ssd1306
import math
# Pin assignment
i2c = SoftI2C(scl=Pin(7), sda=Pin(6)) # Adjust the Pin numbers based on your connections
oled_width = 128
oled_height = 64
oled = ssd1306.SSD1306_I2C(oled_width, oled_height, i2c)
oled.fill(0) # Clear the screen
oled.text("Hello, Seeder!", 10, 15)
oled.text("/////", 30, 40)
oled.text("(`3`)y", 30, 55)
oled.show() # Show the text
¡Gracias por leer este artículo! Siéntete libre de compartir tus pensamientos en los comentarios.
Recursos
- El archivo binario del firmware para XIAO ESP32C3 con MicroPython
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarte diferentes tipos de soporte para asegurar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para satisfacer diferentes preferencias y necesidades.