Seeed Studio XIAO RA4M1 Con MicroPython
MicroPython es un intérprete de Python con una función de compilación de código nativo parcial. Proporciona un subconjunto de características de Python 3.5, implementado para procesadores embebidos y sistemas restringidos. Es diferente de CircuitPython y puedes leer más sobre las diferencias en la documentación de MicroPython.
Usando MicroPython con XIAO RA4M1
A continuación, te guiaré sobre cómo usar MicroPython en el XIAO MG24 Sense y programarlo con Thonny IDE, basado en el sistema operativo Windows.
Preparación del Hardware
| Seeed Studio XIAO RA4M1 | Seeed Studio XIAO Debug Mate |
|---|---|
 |  |
Instalar Thonny IDE
Elige la versión apropiada para la instalación. Aquí, lo estoy instalando en un sistema Windows, así que he seleccionado la versión de Windows.
Sigue las instrucciones para la versión de Python deseada.
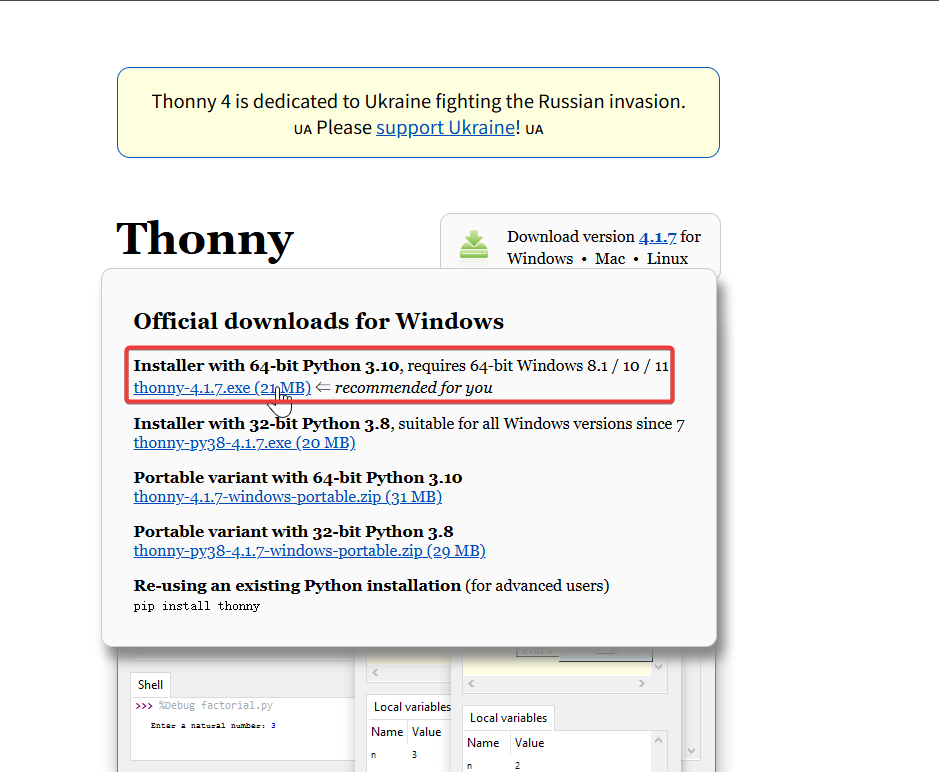
Luego, simplemente sigue los pasos predeterminados para la configuración.
Descargar el repositorio
Clónalo en la máquina local, y luego recuerda la ruta donde se almacena este MicroPython de XIAO RA4M1. Esta ruta se usará más tarde.
git clone https://github.com/Seeed-Studio/micropython-seeed-boards.git
Ejemplo de Parpadeo de LED
Aquí te mostraremos cómo encender el LED USER en el XIAO MG24 usando MicroPython con Thonny IDE.
Paso 1. Flashear el firmware de MicroPython
-
Descarga el paquete de Firmware de MicroPython para XIAO RA4M1 y extráelo en la ubicación apropiada. Luego abre la terminal en esta carpeta.
-
Inserta el XIAO RA4M1 en el XIAO XIAO Debug Mate.

- Haz clic en xiao_ra4m1_flash.bat y espera a que se complete la programación.

- Para Mac / Linux
sudo chmod +x xiao_ra4m1_flash.sh && ./xiao_ra4m1_flash.sh
Este script tiene comandos de cadena de herramientas de flasheo preconfigurados. Si lo estás usando por primera vez, puede tomar un poco de tiempo.
Después de haber terminado de programar el firmware, necesitas desconectar el XIAO RA4M1 del XIAO XIAO XIAO Debug Mate y conectarlo vía USB-C.
Paso 2. Configuración del Intérprete
Abre Thonny IDE, luego haz clic en la esquina inferior derecha de la interfaz para configurar las opciones del intérprete. Selecciona MicroPython (generic) y Puerto. Después de una configuración exitosa, la información de la versión de MicroPython se mostrará en el Shell.

Paso 3. Subir el archivo boards
- Abre la vista, selecciona File, y la ruta del administrador de archivos se mostrará en la barra lateral izquierda.

- Abre la ruta del archivo clonado o descargado, y abre
micropython-seeed-boards-master\examples - Hay múltiples archivos Python de xiao en la carpeta boards, pero la capacidad de memoria flash del XIAO RAM41 es limitada, así que solo necesitas mantener los dos archivos:
xiao.pyyxiao_ra4m1.py.

- Selecciona la carpeta boards y súbela al flash. Luego, podrás ver el archivo subido en el dispositivo/flash de MicroPython.

Paso 4. Ejecutar el Código
Haz clic en File -> New para crear un nuevo archivo y guárdalo como blink.py.
import time
from boards.xiao import XiaoPin
led = "led"
try:
# Initialize LED
led = XiaoPin(led, XiaoPin.OUT)
while True:
# LED 0.5 seconds on, 0.5 seconds off
led.value(1)
time.sleep(0.5)
led.value(0)
time.sleep(0.5)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: %s" % {e})
finally:
led.value(1)
Explicación del Código:
-
Importar Módulos
timeImporta el módulo timeXiao PinImporta la clase de control de pines para la placa de desarrollo Seeed Xiao desde el módulo boards.xiao, que se usa para operar los pines en la placa.
-
Definir Pines
led = "led""Especifica que el pin está conectado al pinledde la placa de desarrollo (aquí, el pin USER)
-
Lógica Principal (bloque try)
- El LED USER parpadeará a intervalos de 0.5 segundos.
Copia el código anterior, luego haz clic en el botón verde o presiona F5 para ejecutarlo.

Una vez que el código comience a ejecutarse, el LED USER parpadeará a intervalos de 0.5 segundos.
El resultado es el siguiente:

Ejemplo de PWM
En el XIAO RA4M1, los pines D5–D10 soportan la función PWM. Introduciremos cómo usar la función PWM con una luz de respiración PWM como ejemplo.
Preparación del Hardware
| Seeed Studio XIAO RA4M1 | Seeed Studio Grove Base for XIAO | Grove - Variable Color LED |
|---|---|---|
|  |  |
Software
- Crea un nuevo archivo llamado pwm.py y copia el código de referencia en él.
- Dado que solo los pines D5–D10 del XIAO RA4M1 soportan la función PWM, aquí se selecciona el pin D9.
import time
from boards.xiao import XiaoPWM
led = 9 #D9
try:
# set the frequency and period of the PWM signal
FREQ = 1000
PERIOD_NS = int(1_000_000_000 // FREQ)
# set the number of steps to fade the LED and the delay between steps
FADE_STEPS = 255
STEP_DELAY = 0.01
STEP_SIZE = 3
# initialize the PWM with a frequency and a 0% duty cycle
pwm = XiaoPWM(led)
pwm.init(freq=FREQ, duty=0)
while True:
# fade the LED in and out
for fade in range(0, FADE_STEPS + 1, STEP_SIZE):
duty_ns = int((fade * PERIOD_NS) / FADE_STEPS)
if duty_ns < 20:
duty_ns = 20
elif duty_ns > 960000:
duty_ns = 960000
pwm.duty_ns(duty_ns)
time.sleep(STEP_DELAY)
# fade the LED in and out again
for fade in range(FADE_STEPS, -1, -STEP_SIZE):
duty_ns = int((fade * PERIOD_NS) / FADE_STEPS)
if duty_ns < 20:
duty_ns = 20
elif duty_ns > 960000:
duty_ns = 960000
pwm.duty_ns(duty_ns)
time.sleep(STEP_DELAY)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: %s",repr(e))
finally:
if pwm is not None:
try:
pwm.deinit()
except Exception:
pass
Explicación del Código:
-
Importar Módulos
time: Importa el módulo de tiempo estándar para manejar retrasos (usado para controlar la velocidad del efecto de respiración).XiaoPWM: Importa la clase de control PWM (Modulación por Ancho de Pulso) del móduloboards.xiao, usada para generar señales similares a analógicas en el pin digital.
-
Definir Pines y Constantes
PIN = 0: Especifica que el dispositivo está conectado al pin D0 en la placa de desarrollo. -FREQ / PERIOD_NS: Establece la frecuencia PWM a 1000 Hz y calcula el período total en nanosegundos (1 segundo / 1000).FADE_STEPS / STEP_DELAY: Configura la resolución de la animación (255 pasos) y la velocidad (0.01s de espera entre cambios).
-
Lógica Principal (bloque try)
- Inicialización: El código inicializa el objeto PWM en el pin D0 comenzando con 0% de brillo (ciclo de trabajo).
- Bucle de Respiración: Dentro del bucle infinito
while True, dos buclesforcontrolan el brillo del LED:- Fade In: Aumenta gradualmente el
duty_ns(ancho de pulso) de 0 a la duración completa del período. - Fade Out: Disminuye gradualmente el
duty_nsdesde el período completo de vuelta a 0.
- Fade In: Aumenta gradualmente el
-
Cálculo del Ciclo de Trabajo: La fórmula
(fade * PERIOD_NS) // FADE_STEPSmapea el paso del bucle (0-255) al tiempo en nanosegundos requerido para el hardware PWM.- Seguridad/Limpieza: El bloque
finallyasegura quepwm.deinit()sea llamado para liberar recursos de hardware si el programa se detiene (ej., vía Ctrl+C).
- Seguridad/Limpieza: El bloque
Gráfico de Resultado
Después de que el programa se ejecute, el LED logrará un efecto de desvanecimiento, y puedes ajustar el tamaño del paso PWM según tus necesidades reales.

Ejemplo Analógico
La Placa de Desarrollo XIAO RA4M1 tiene un ADC de 12 bits para lectura de alta resolución de valores de sensores analógicos, lo que nos ayuda a leer valores más precisos.
A continuación, elegiremos dos sensores para reflejar las características del ADC.
Preparación de Hardware
| Seeed Studio XIAO RA4M1 | Seeed Studio Grove Base para XIAO | Grove - LED de Color Variable | Grove-Sensor de Ángulo Rotatorio |
|---|---|---|---|
| | |  |
Software
- Crea un nuevo archivo llamado adc.py y copia el código de referencia en él.
import time
from boards.xiao import XiaoPin, XiaoADC, XiaoPWM
adc_pin = 0 #D0
pwm_pin = 9 #D9
try:
adc = XiaoADC(adc_pin)
pwm = XiaoPWM(pwm_pin)
FREQ = 1000
PERIOD_NS = 1000000000 // FREQ
pwm.freq(FREQ)
pwm.duty_ns(0)
MAX_VOLTAGE = 3.3
DEAD_ZONE = 0.02
last_duty = -1
while True:
raw_value = adc.read_u16()
voltage = (raw_value / 65535.0) * MAX_VOLTAGE
# Calculate the base percentage (0.0 - 1.0)
duty_percent = voltage / MAX_VOLTAGE
# scope limitation
if duty_percent < 0: duty_percent = 0
if duty_percent > 1: duty_percent = 1
if abs(duty_percent - last_duty) < DEAD_ZONE:
time.sleep(0.05)
continue
inverted_duty = 1.0 - duty_percent
duty_ns = int(inverted_duty * PERIOD_NS)
if duty_ns < 20: duty_ns = 20
elif duty_ns > (PERIOD_NS * 0.96): duty_ns = int(PERIOD_NS * 0.96)
pwm.duty_ns(duty_ns)
print("Voltage: {:.2f}V, Brightness: {:.1f}%".format(voltage, duty_percent * 100))
last_duty = duty_percent
time.sleep(0.05)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: {}".format(e))
finally:
pwm.deinit()
-
Importar Módulos
time: Importa el módulo de tiempo estándar para manejar retrasos (usado para controlar la velocidad del efecto de respiración).XiaoPWM: Importa la clase de control PWM (Modulación por Ancho de Pulso) del móduloboards.xiao, usada para generar señales similares a analógicas en el pin digital. Explicación del Código:
-
Importar Módulos
time: Importa el módulo de tiempo estándar para manejar retrasos (usado para controlar la velocidad de muestreo del bucle).XiaoADC,XiaoPWM: Importa las clases de control de hardware del móduloboards.xiao.XiaoADCmaneja la entrada analógica (potenciómetro), yXiaoPWMmaneja la salida de modulación por ancho de pulso (LED).
-
Definir Pines y Constantes
adc_pin = 0/pwm_pin = 1: Mapea los pines físicos. El pin D0 se usa para el sensor de entrada, y el pin D1 se usa para el LED de salida.FREQ / PERIOD_NS: Establece la frecuencia de operación PWM a 1000 Hz y calcula la duración del período en nanosegundos (1,000,000 ns).MAX_VOLTAGE / DEAD_ZONE: Define el voltaje de referencia (3.3V) y un umbral de zona muerta del 2% para filtrar el ruido eléctrico y prevenir que el LED parpadee.
-
Lógica Principal (bloque try)
- Inicialización: Configura los objetos ADC y PWM. El PWM comienza con un ciclo de trabajo de 0.
- Bucle de Control: Dentro del bucle
while True, el código monitorea continuamente el sensor:- Leer y Normalizar: Lee el entero de 16 bits sin procesar (0-65535) del ADC y lo convierte en un voltaje de punto flotante (0.0V - 3.3V).
- Filtro de Vibración: Compara la lectura actual con
last_duty. Si el cambio es menor que laDEAD_ZONE, el bucle omite la actualización para mantener estabilidad.
-
Cálculo del Ciclo de Trabajo e Inversión de Lógica
- Lógica Activa Baja: La línea
inverted_duty = 1.0 - duty_percentinvierte la lógica. - Razón: Tu LED probablemente es Activo Bajo (conectado a VCC).
- Efecto: A medida que el voltaje aumenta,
duty_nsse vuelve más pequeño (manteniendo el pin LOW por más tiempo), haciendo que el LED sea más brillante.
- Lógica Activa Baja: La línea
-
Limitadores de Seguridad: El código limita la señal de salida entre un mínimo de 20ns y un máximo del 96% del período. Esto protege el hardware y asegura que la señal permanezca dentro de un rango válido.
-
Salida y Limpieza
- Retroalimentación: Imprime el voltaje actual y el porcentaje de brillo en la consola usando
.format()para compatibilidad con versiones anteriores de MicroPython. - Seguridad/Limpieza: El bloque
finallygarantiza quepwm.deinit()se ejecute cuando el programa se detenga, apagando de forma segura los recursos de hardware PWM.
- Retroalimentación: Imprime el voltaje actual y el porcentaje de brillo en la consola usando
Gráfico de resultados
- Gira el Grove-Rotary Angle Sensor, y el brillo del LED cambiará en consecuencia.

- La ventana Shell también imprimirá el voltaje y el porcentaje de brillo.

Ejemplo UART
UART es uno de los protocolos de comunicación más utilizados. Permite la transmisión de datos con solo dos líneas de datos, y su bajo costo lo hace ampliamente utilizado en muchos campos. A continuación, demostraremos la aplicación de la comunicación serie tomando como ejemplo la transmisión de datos del módulo GPS.
Preparación del Hardware
| Seeed Studio XIAO RA4M1 | Módulo L76K GNSS para Seeed Studio XIAO |
|---|---|
|  |
Software
- Crea un nuevo archivo llamado uart.py y copia el código de referencia en él.
Código de Referencia
from boards.xiao import XiaoUART
import time
import math
uart = "uart1"
baudrate = 9600
tx = 6 # D6
rx = 7 # D7
# Coordinate structure
class Coordinates:
def __init__(self, Lon=0.0, Lat=0.0):
self.Lon = Lon
self.Lat = Lat
# GPS data structure
class GNRMC:
def __init__(self):
self.Lon = 0.0 # GPS Longitude
self.Lat = 0.0 # GPS Latitude
self.Lon_area = '' # E or W
self.Lat_area = '' # N or S
self.Time_H = 0 # Time Hour
self.Time_M = 0 # Time Minute
self.Time_S = 0 # Time Second
self.Status = 0 # 1: Successful positioning, 0: Positioning failed
# Convert WGS-84 to GCJ-02
def transformLat(x, y):
ret = -100.0 + 2.0 * x + 3.0 * y + 0.2 * y * y + 0.1 * x * y + 0.2 * math.sqrt(abs(x))
ret += (20.0 * math.sin(6.0 * x * pi) + 20.0 * math.sin(2.0 * x * pi)) * 2.0 / 3.0
ret += (20.0 * math.sin(y * pi) + 40.0 * math.sin(y / 3.0 * pi)) * 2.0 / 3.0
ret += (160.0 * math.sin(y / 12.0 * pi) + 320 * math.sin(y * pi / 30.0)) * 2.0 / 3.0
return ret
# Convert WGS-84 to GCJ-02
def transformLon(x, y):
ret = 300.0 + x + 2.0 * y + 0.1 * x * x + 0.1 * x * y + 0.1 * math.sqrt(abs(x))
ret += (20.0 * math.sin(6.0 * x * pi) + 20.0 * math.sin(2.0 * x * pi)) * 2.0 / 3.0
ret += (20.0 * math.sin(x * pi) + 40.0 * math.sin(x / 3.0 * pi)) * 2.0 / 3.0
ret += (150.0 * math.sin(x / 12.0 * pi) + 300.0 * math.sin(x / 30.0 * pi)) * 2.0 / 3.0
return ret
# Convert GCJ-02 to BD-09
def bd_encrypt(gg):
bd = Coordinates()
x = gg.Lon
y = gg.Lat
z = math.sqrt(x * x + y * y) + 0.00002 * math.sin(y * x_pi)
theta = math.atan2(y, x) + 0.000003 * math.cos(x * x_pi)
bd.Lon = z * math.cos(theta) + 0.0065
bd.Lat = z * math.sin(theta) + 0.006
return bd
# Convert WGS-84 to GCJ-02
def transform(gps):
gg = Coordinates()
dLat = transformLat(gps.Lon - 105.0, gps.Lat - 35.0)
dLon = transformLon(gps.Lon - 105.0, gps.Lat - 35.0)
radLat = gps.Lat / 180.0 * pi
magic = math.sin(radLat)
magic = 1 - ee * magic * magic
sqrtMagic = math.sqrt(magic)
dLat = (dLat * 180.0) / ((a * (1 - ee)) / (magic * sqrtMagic) * pi)
dLon = (dLon * 180.0) / (a / sqrtMagic * math.cos(radLat) * pi)
gg.Lat = gps.Lat + dLat
gg.Lon = gps.Lon + dLon
return gg
# Convert to Baidu coordinates (BD-09)
def L76X_Baidu_Coordinates(gps):
wgs84_coords = Coordinates(gps.Lon, gps.Lat)
gcj02_coords = transform(wgs84_coords)
bd09_coords = bd_encrypt(gcj02_coords)
return bd09_coords
# Convert to Google coordinates (GCJ-02)
def L76X_Google_Coordinates(gps):
wgs84_coords = Coordinates(gps.Lon, gps.Lat)
gcj02_coords = transform(wgs84_coords)
return gcj02_coords
# Parse GNRMC NMEA sentence
def parse_gnrmc(nmea_sentence):
gps = GNRMC()
if not nmea_sentence.startswith(b'$GNRMC') and not nmea_sentence.startswith(b'$PNRMC'):
return gps
try:
# Convert to string and split by commas
sentence_str = nmea_sentence.decode('ascii', 'ignore')
fields = sentence_str.split(',')
if len(fields) < 12:
return gps
# Parse time field (HHMMSS.sss)
if fields[1]:
time_str = fields[1]
if '.' in time_str:
time_str = time_str.split('.')[0]
if len(time_str) >= 6:
gps.Time_H = int(time_str[0:2]) + 8 # GMT+8
gps.Time_M = int(time_str[2:4])
gps.Time_S = int(time_str[4:6])
if gps.Time_H >= 24:
gps.Time_H -= 24
# Parse status
gps.Status = 1 if fields[2] == 'A' else 0
if gps.Status == 1:
# Parse latitude (DDMM.MMMMM)
if fields[3] and fields[4]:
lat_str = fields[3]
if '.' in lat_str:
degrees = float(lat_str[0:2])
minutes = float(lat_str[2:])
gps.Lat = degrees + minutes / 60.0
gps.Lat_area = fields[4]
# Parse longitude (DDDMM.MMMMM)
if fields[5] and fields[6]:
lon_str = fields[5]
if '.' in lon_str:
degrees = float(lon_str[0:3])
minutes = float(lon_str[3:])
gps.Lon = degrees + minutes / 60.0
gps.Lon_area = fields[6]
except Exception as e:
print("Parse error:", e)
return gps
# Print formatted GPS data
def print_gps_data(gps):
print("\n--- GPS Data ---")
print("Time (GMT+8): {:02d}:{:02d}:{:02d}".format(gps.Time_H, gps.Time_M, gps.Time_S))
if gps.Status == 1:
print("Latitude (WGS-84): {:.6f} {}".format(gps.Lat, gps.Lat_area))
print("Longitude (WGS-84): {:.6f} {}".format(gps.Lon, gps.Lon_area))
# Coordinate conversion
baidu_coords = L76X_Baidu_Coordinates(gps)
google_coords = L76X_Google_Coordinates(gps)
print("Baidu Latitude: {:.6f}".format(baidu_coords.Lat))
print("Baidu Longitude: {:.6f}".format(baidu_coords.Lon))
print("Google Latitude: {:.6f}".format(google_coords.Lat))
print("Google Longitude: {:.6f}".format(google_coords.Lon))
print("GPS positioning successful.")
else:
print("GPS positioning failed or no valid data.")
try:
uart = XiaoUART(uart, baudrate, tx, rx)
# Initialize UART
uart.init(9600, bits=8, parity=None, stop=1)
# Buffer to accumulate complete messages
buffer = bytearray()
# Constants for coordinate transformation
pi = 3.14159265358979324
a = 6378245.0
ee = 0.00669342162296594323
x_pi = 3.14159265358979324 * 3000.0 / 180.0
while True:
available = uart.any()
if available > 0:
# Read all available bytes
data = uart.read(available)
buffer.extend(data)
# Check if we have a complete line (ends with newline)
if b'\n' in buffer:
# Find the newline position
newline_pos = buffer.find(b'\n')
# Extract the complete message
complete_message = buffer[:newline_pos + 1]
# Remove the processed part from buffer
buffer = buffer[newline_pos + 1:]
# Parse GNRMC sentences
if complete_message.startswith(b'$GNRMC') or complete_message.startswith(b'$PNRMC'):
gps_data = parse_gnrmc(complete_message)
print_gps_data(gps_data)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: %s" % {e})
finally:
uart.deinit()
Explicación del Código:
-
Importar Módulos
XiaoUARTImporta la clase de comunicación UART para la placa de desarrollo Seeed Xiao desde el móduloboards.xiao, utilizada para inicializar y controlar la comunicación serie.timeImporta el módulo de tiempo para soportar funciones relacionadas con el tiempo (aunque no se usa directamente aquí, se importa para uso futuro potencial o compatibilidad).mathImporta funciones matemáticas (sin,cos,sqrt,atan2, etc.) requeridas para algoritmos de transformación de coordenadas.
-
Definir Configuración UART
uart = "uart1"Especifica la instancia del controlador UART a usar — aquí,uart1.baudrate = 9600Establece la velocidad de baudios para comunicación serie a 9600 bps.tx = 6Especifica que el pin de transmisión UART (TX) está conectado al pin digital D6.rx = 7Especifica que el pin de recepción UART (RX) está conectado al pin digital D7.
-
Definir Estructuras de Datos
- Clase
Coordinates: Un contenedor simple para almacenar valores de longitud/latitud como números de punto flotante. - Clase
GNRMC: Representa datos GPS analizados de una sentencia NMEA$GNRMC. Contiene:- Latitud/Longitud en grados decimales
- Indicadores de hemisferio (
N/S,E/W) - Tiempo (hora, minuto, segundo — ajustado a GMT+8)
- Bandera de estado (1 = posición válida, 0 = sin posición)
- Clase
-
Funciones de Transformación de Coordenadas
transformLat(x, y)&transformLon(x, y)— Funciones auxiliares que implementan parte del algoritmo de conversión WGS-84 → GCJ-02 (usado en China para ofuscación de mapas).bd_encrypt(gg)— Convierte coordenadas GCJ-02 al sistema de coordenadas BD-09 de Baidu aplicando desplazamiento y rotación adicionales.transform(gps)— Función principal que convierte coordenadas WGS-84 (GPS crudo) a GCJ-02 usando fórmulas trigonométricas complejas basadas en el modelo elíptico de la Tierra.L76X_Baidu_Coordinates(gps)— Envoltorio que convierte GPS crudo (WGS-84) → GCJ-02 → BD-09 (formato de Mapas Baidu).L76X_Google_Coordinates(gps)— Envoltorio que convierte GPS crudo (WGS-84) → GCJ-02 (formato de Google Maps en China).
-
Analizar Sentencia GNRMC
parse_gnrmc(nmea_sentence)— Analiza una cadena NMEA$GNRMCo$PNRMCcruda en un objetoGNRMCestructurado.- Extrae tiempo (convierte de UTC a GMT+8).
- Verifica estado (
A= activo/posición válida,V= inválido). - Analiza latitud/longitud del formato DDMM.MMMMM → grados decimales.
- Devuelve objeto
GNRMCpoblado o uno vacío por defecto si el análisis falla.
-
Mostrar Datos GPS Formateados
print_gps_data(gps)— Imprime información GPS legible incluyendo:- Tiempo local (GMT+8)
- Coordenadas WGS-84 crudas con hemisferio
- Coordenadas convertidas GCJ-02 (compatible con Google) y BD-09 (compatible con Baidu)
- Mensaje de estado indicando si el posicionamiento tuvo éxito
-
Lógica Principal (bloque try)
- Inicializa interfaz UART con parámetros especificados.
- Define constantes globales necesarias para matemáticas de coordenadas (
pi,a,ee,x_pi) — parámetros del elipsoide terrestre y factores de escala. - Entra en bucle infinito para leer continuamente datos GPS entrantes vía UART.
- Usa
bufferpara acumular mensajes parciales hasta que se recibe una línea completa (terminando con\n). - Cuando llega una línea completa:
- Verifica si comienza con
$GNRMCo$PNRMC - Si es así, la analiza usando
parse_gnrmc() - Muestra salida formateada vía
print_gps_data()
- Verifica si comienza con
- Usa
- Maneja excepciones:
KeyboardInterrupt: Sale elegantemente con Ctrl+C.Exceptiongeneral: Captura e imprime cualquier error inesperado.
- Finalmente, llama
uart.deinit()para limpiar recursos UART antes de salir.
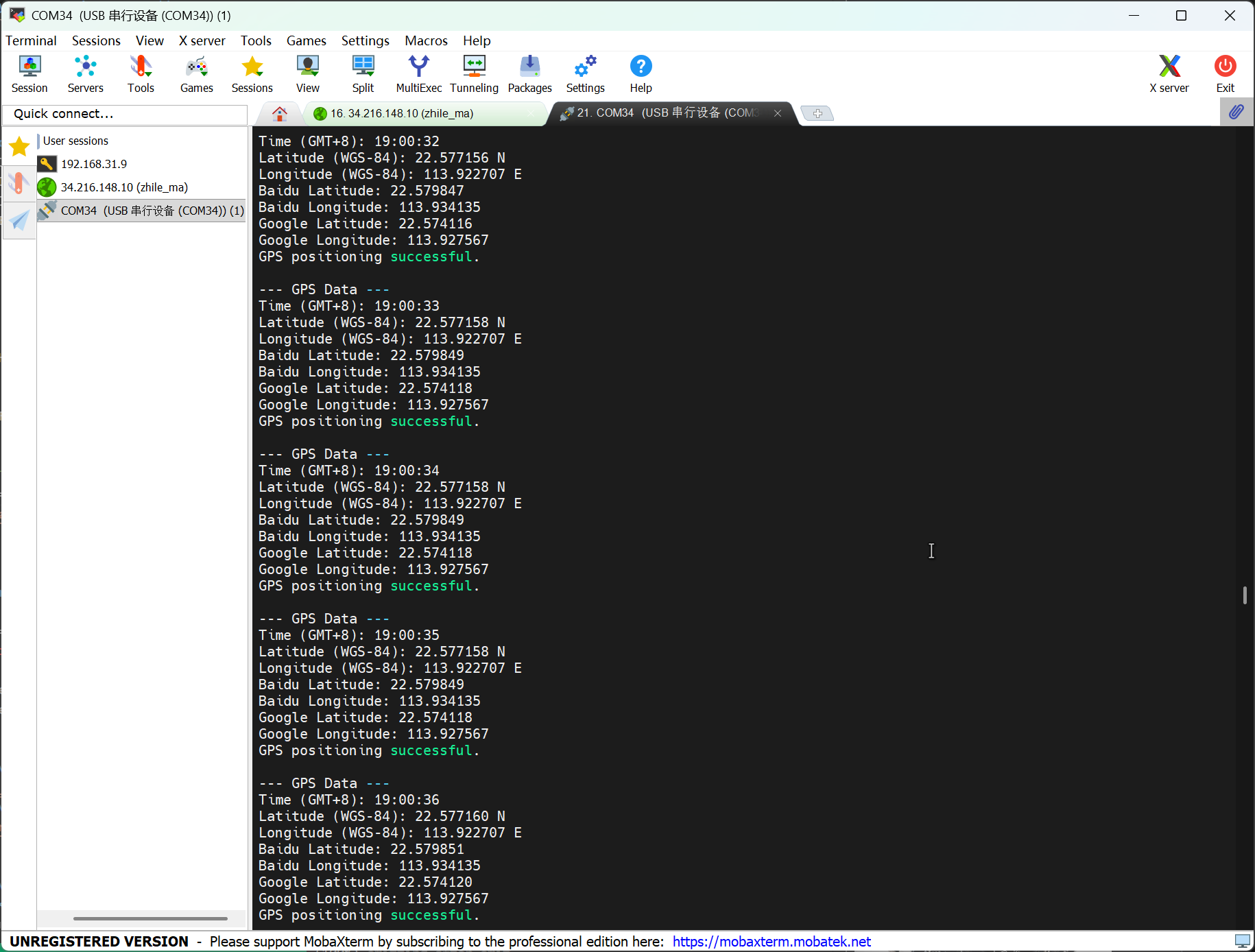
Gráfico de resultados
- Abre cualquier herramienta de puerto serie y establece la velocidad de baudios a 9600.
- El módulo GPS debe usarse en un área exterior abierta.
- El programa imprimirá la información GPS de tu ubicación.
Ejemplo I2C
XIAO RAM41 tiene una interfaz I2C que puede usarse para transmisión de datos y análisis de muchos sensores, así como para usar pantallas OLED.
Preparación de Hardware
| Seeed Studio XIAO RA4M1 | Seeed Studio Expansion Base for XIAO with Grove OLED |
|---|---|
|  |
Software
- Crea un nuevo archivo llamado i2c.py y copia el código de referencia en él.
Código de Referencia
import time
from boards.xiao import XiaoI2C
sda = 4 #D4
scl = 5 #D5
i2c = "i2c0"
frq = 400000
i2c = XiaoI2C(i2c, sda, scl, frq)
# Basic 8x8 font
font_data = {
' ': [0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00],
'D': [0x78,0x44,0x42,0x42,0x42,0x44,0x78,0x00],
'E': [0x7C,0x40,0x40,0x78,0x40,0x40,0x7C,0x00],
'H': [0x44,0x44,0x44,0x7C,0x44,0x44,0x44,0x00],
'L': [0x40,0x40,0x40,0x40,0x40,0x40,0x7C,0x00],
'O': [0x3C,0x42,0x42,0x42,0x42,0x42,0x3C,0x00],
'R': [0x7C,0x42,0x42,0x7C,0x48,0x44,0x42,0x00],
'W': [0x42,0x42,0x42,0x42,0x5A,0x66,0x42,0x00],
}
# Write a single command byte to SSD1306 via I2C
def ssd1306_write_command(cmd):
i2c.writeto(0x3C, bytes([0x00, cmd]))
# Write multiple command bytes to SSD1306 via I2C
def ssd1306_write_commands(cmds):
data = bytearray([0x00] + list(cmds))
i2c.writeto(0x3C, data)
# Write display data bytes to SSD1306 via I2C
def ssd1306_write_data(data):
buffer = bytearray(len(data) + 1)
buffer[0] = 0x40
buffer[1:] = data
i2c.writeto(0x3C, buffer)
# Clear the entire SSD1306 display
def ssd1306_clear():
ssd1306_write_commands(bytearray([0x21, 0, 127]))
ssd1306_write_commands(bytearray([0x22, 0, 7]))
empty_data = bytearray(128)
for _ in range(8):
ssd1306_write_data(empty_data)
ssd1306_write_commands([0x21, 0, 127])
# Initialize SSD1306 display with recommended settings
def ssd1306_init():
commands = [
bytearray([0xAE]),
bytearray([0xD5, 0x80]),
bytearray([0xA8, 63]),
bytearray([0xD3, 0x00]),
bytearray([0x40]),
bytearray([0x8D, 0x14]),
bytearray([0x20, 0x00]),
bytearray([0xA1]),
bytearray([0xC8]),
bytearray([0xDA, 0x12]),
bytearray([0x81, 0xCF]),
bytearray([0xD9, 0xF1]),
bytearray([0xDB, 0x40]),
bytearray([0xA4]),
bytearray([0xA6]),
bytearray([0xAF])
]
for cmd in commands:
ssd1306_write_commands(cmd)
ssd1306_clear()
print("SSD1306 initialized successfully")
ssd1306_write_commands([0x21, 0, 127])
# Draw a string of text at specified column and page (row) on SSD1306
def ssd1306_draw_text(text, x, y):
ssd1306_write_commands(bytearray([0x21, x, x + len(text) * 8 - 1]))
ssd1306_write_commands(bytearray([0x22, y, y + 0]))
display_data = bytearray()
for char in text:
font_bytes = font_data.get(char.upper(), font_data[' '])
for col in range(7, -1, -1):
val = 0
for row in range(8):
if font_bytes[row] & (1 << col):
val |= (1 << row)
display_data.append(val)
ssd1306_write_data(display_data)
try:
i2c_addr = i2c.scan()
if 0x3C not in i2c_addr:
raise Exception("SSD1306 not found on I2C bus")
else:
print("SSD1306 found on I2C bus: 0x3C")
# Initialize display
ssd1306_init()
ssd1306_draw_text("HELLO WORLD", 20, 4)
while True:
time.sleep(1)
except KeyboardInterrupt:
print("\nProgram interrupted by user")
except Exception as e:
print("\nError occurred: %s" % {e})
Explicación del Código:
-
Importar Módulos
time: Importa el módulo de tiempo estándar para manejar pausas y retrasos del programa (usado aquí para el sleep del buclewhile).XiaoI2C: Importa la clase I2C específica del hardware desdeboards.xiao, que maneja el protocolo de comunicación de bajo nivel para la placa de desarrollo XIAO.
-
Definir Configuración I2C
sda = 4,scl = 5: Asigna las líneas de datos I2C (SDA) y reloj (SCL) a los pines digitales D4 y D5 respectivamente. -i2c = "i2c0": Selecciona el bus periférico I2C de hardware específico (bus 0) en el microcontrolador.frq = 400000: Establece la velocidad de comunicación a 400 kHz (Modo Rápido), permitiendo actualizaciones rápidas de pantalla.i2c = XiaoI2C(...): Instancia el objeto I2C con la configuración de pines y frecuencia definida.
-
Definir Datos de Fuente
font_data: Un diccionario que actúa como tabla de búsqueda. Mapea caracteres (como 'H', 'E') a una lista de 8 bytes hexadecimales. Estos bytes representan la máscara de bits para los píxeles de ese carácter en una cuadrícula de 8x8.
-
Funciones Auxiliares (Controlador de Bajo Nivel)
ssd1306_write_command(cmd): Envía una sola instrucción de control a la pantalla. Prefija el byte con0x00, diciéndole al controlador SSD1306 que el siguiente byte es un comando, no datos de píxeles.ssd1306_write_commands(cmds): Envía eficientemente una secuencia de comandos de configuración en una sola transacción I2C para minimizar la sobrecarga.ssd1306_write_data(data): Envía datos gráficos a la RAM de la pantalla. Prefija los datos con0x40, indicando que los siguientes bytes representan píxeles que deben encenderse.
-
Funciones Auxiliares (Control de Alto Nivel)
ssd1306_clear(): Borra el contenido de la pantalla. Establece la dirección de columna (0-127) y la dirección de página (0-7) para cubrir toda la pantalla, luego escribe ceros (píxeles en blanco) en cada ubicación de memoria.ssd1306_init(): Envía una secuencia estricta de códigos hexadecimales (ej.,0xAEpara apagar la pantalla,0x8D 0x14para habilitar la bomba de carga) para configurar el voltaje del panel OLED, la dirección de escaneo y el modo de direccionamiento antes de encenderlo.ssd1306_draw_text(text, x, y): La función gráfica principal.- Establece la ventana de dibujo en la pantalla usando los comandos
0x21(Dirección de Columna) y0x22(Dirección de Página). - Itera a través de la cadena de entrada, recupera los bytes de la fuente y realiza operaciones bit a bit (
val |= (1 << row)) para transponer/rotar los datos para que coincidan con la estructura de memoria específica del SSD1306.
-
Lógica Principal (Flujo de Ejecución)
i2c.scan(): Detecta todos los dispositivos conectados al bus I2C para asegurar que el cableado sea correcto.- Validación de Dirección: Verifica si la pantalla está presente en la dirección
0x3C. Si no se encuentra, genera un error para detener la ejecución; de lo contrario, imprime una confirmación. ssd1306_init(): Despierta la pantalla y aplica la configuración.ssd1306_draw_text("HELLO WORLD", 20, 4): Renderiza el texto "HELLO WORLD" comenzando en la columna de píxel 20 en la página 4 (aproximadamente en el centro-izquierda de la pantalla).while True: Entra en un bucle infinito que duerme por 1 segundo repetidamente, manteniendo el programa en ejecución para que la pantalla permanezca activa.try...except: Envuelve la lógica principal en un manejador de errores para capturar problemas (como hardware faltante) o una interrupción del usuario (Ctrl+C), asegurando que el programa termine de manera elegante con un mensaje legible.
Gráfico de resultado
- Una vez que el programa comience a ejecutarse, mostrará HELLO WORLD en la pantalla.

Resumen
¡Felicitaciones! Habiendo completado los tutoriales anteriores, has adquirido la capacidad para el desarrollo básico y la depuración con XIAO RA4M1 y MicroPython. Esperamos verte crear proyectos más interesantes basados en estas habilidades fundamentales
Soporte Técnico y Discusión de Productos
¡Gracias por elegir nuestros productos! Estamos aquí para brindarte diferentes tipos de soporte para asegurar que tu experiencia con nuestros productos sea lo más fluida posible. Ofrecemos varios canales de comunicación para satisfacer diferentes preferencias y necesidades.