Fine-tune GR00T N1.7 for reBot Arm and Deploy on Jetson Thor
Introduction
This wiki explains how to fine-tune NVIDIA Isaac GR00T N1.7 for the reBot Arm B601 DM and deploy it on reComputer Robotics J601 using TensorRT acceleration.
NVIDIA GR00T N1.7 marks a major leap forward in the evolution of embodied intelligence as a cutting-edge, end-to-end Vision-Language-Action (VLA) foundation model. It seamlessly bridges the gap between perception and execution, allowing robots to transform complex visual inputs and verbal cues directly into real-world physical maneuvers. Powered by the new Cosmos Reason2-2B vision-language model, GR00T N1.7 achieves an unprecedented level of environmental awareness, while its state-of-the-art DiT (Diffusion Transformer) action decoder delivers ultra-smooth action generation and rock-solid robustness against real-world disturbances.

Hardware Requirements
- reComputer Robotics J601 with NVIDIA Jetson Thor (JetPack 7.x installed)
- reBot Arm B601 DM
- Star Arm 102 for reBot Arm B601‑DM Leader
- USB-to-CAN adapter
- USB camera x2
- Power supply and USB cable for the robotic arm
Hardware Connection
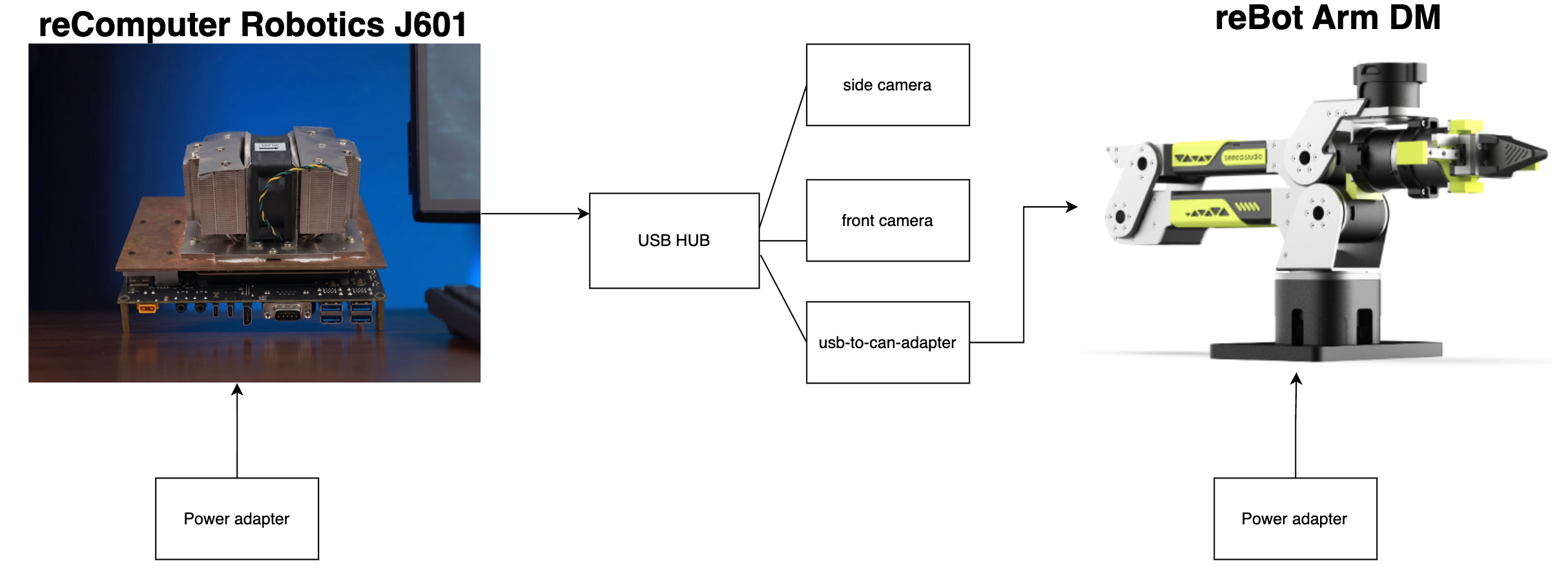
Data collection
If you want to deploy your own VLA model, first of all, we need to collect a dataset suitable for our task to fine-tune the model, so that it can be adapted to our crawling task. You can refer to this wiki for environment configuration and data collection.
Model fine-tuning
Prepare Python Environment
On the fine-tuning server (x86 with GPU), clone the repository and set up the environment:
sudo apt install git-lfs && git lfs install
git clone --recurse-submodules https://github.com/NVIDIA/Isaac-GR00T
cd Isaac-GR00T
sudo apt-get update && sudo apt-get install -y ffmpeg
uv sync --python 3.10
cd /examples/SO100/
uv pip install -e .
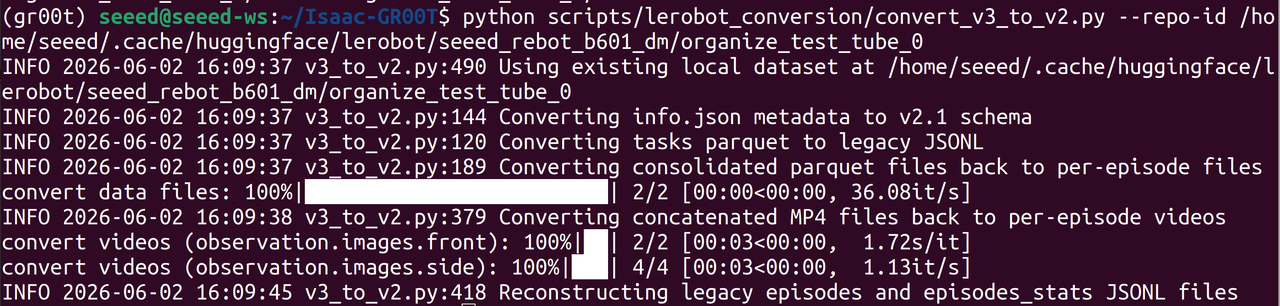
Dataset Conversion
The dataset collected via the LeRobot framework is in v3.0 format, while GR00T requires v2.0. Run the conversion script included in the Isaac-GR00T repository:
cd <path-to-isaac-gr00t>
uv run --project scripts/lerobot_conversion \
python scripts/lerobot_conversion/convert_v3_to_v2.py \
--repo-id /home/seeed/.cache/huggingface/lerobot/seeed_rebot_b601_dm/organize_test_tube
Please replace the file path with your own dataset path.
After execution, the previously collected LeRobot dataset will be downgraded from v3.0 to v2.0 format.
Then copy the following modality.json file into the meta folder of the converted dataset:
modality.json (click to expand)
{
"state": {
"single_arm": {
"start": 0,
"end": 6
},
"gripper": {
"start": 6,
"end": 7
}
},
"action": {
"single_arm": {
"start": 0,
"end": 6
},
"gripper": {
"start": 6,
"end": 7
}
},
"video": {
"front": {
"original_key": "observation.images.front"
},
"side": {
"original_key": "observation.images.side"
}
},
"annotation": {
"human.task_description": {
"original_key": "task_index"
}
}
}
Fine-tune the GR00T N1.7
Once the dataset is ready, run the fine-tuning script:
cd <path-to-isaac-gr00t>
uv pip uninstall deepspeed
export MAX_STEPS=10000
export SAVE_STEPS=5000
bash examples/finetune.sh \
--base-model-path nvidia/GR00T-N1.7-3B \
--dataset-path /home/seeed/.cache/huggingface/lerobot/seeed_rebot_b601_dm/organize_test_tube_0 \
--modality-config-path examples/SO100/so100_config.py \
--embodiment-tag NEW_EMBODIMENT \
--output-dir ~/output
Please replace the file path with your own dataset and output directory paths.
Since our training dataset is relatively small, you can reduce the number of training steps to save compute resources.
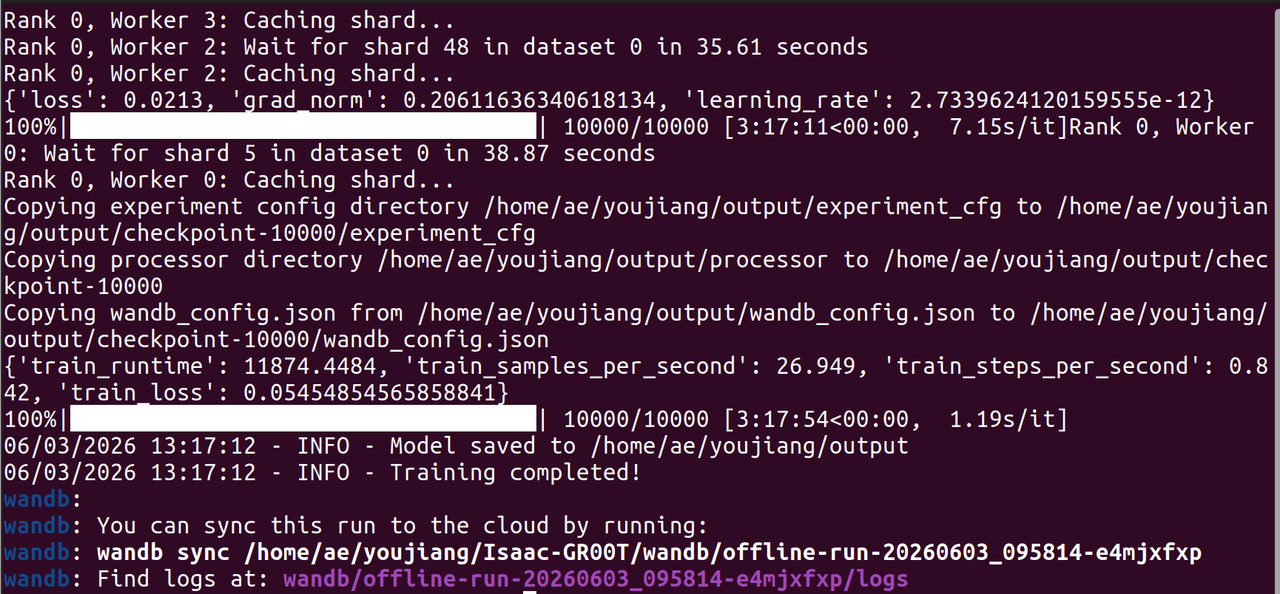
After training is complete, you can find the fine-tuned GR00T N1.7 model files in the --output-dir directory.

Deploy on Jetson
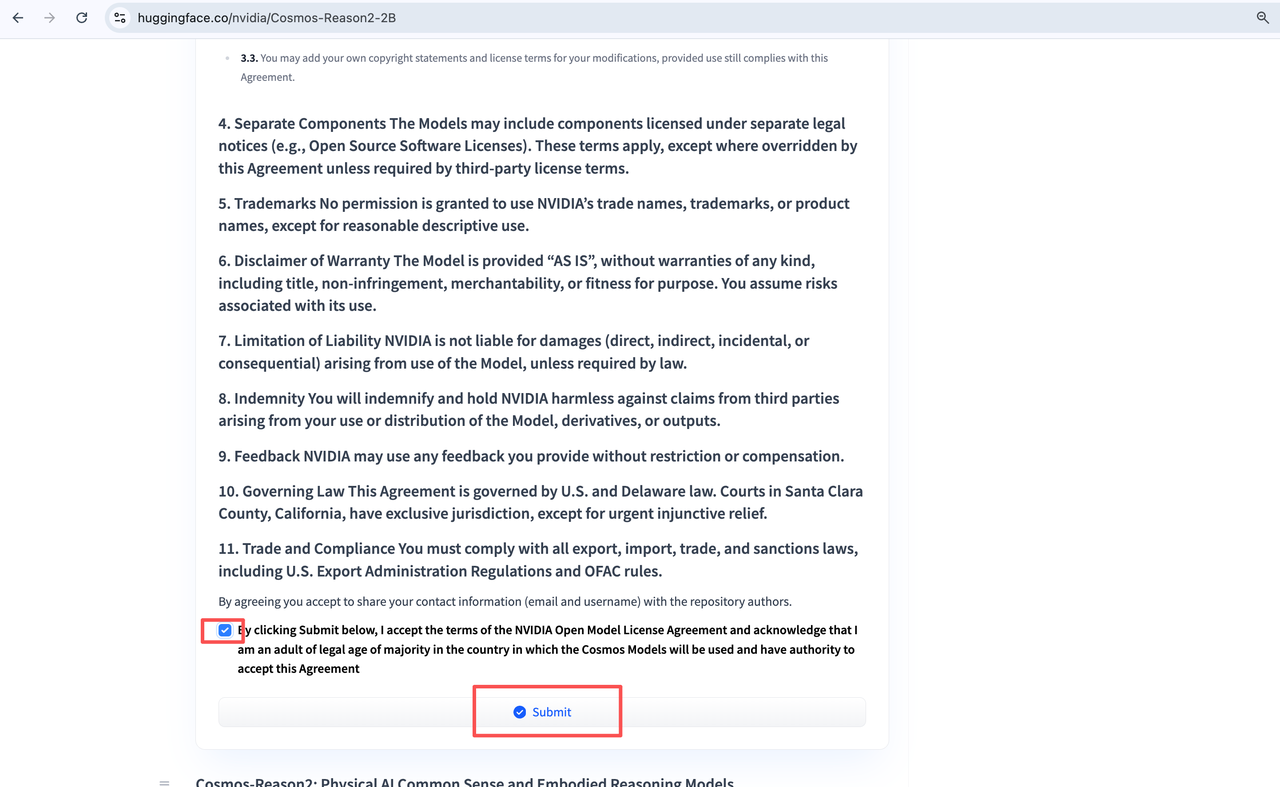
Permission Acquisition
To download models and datasets from Hugging Face, you need to grant access to the required repositories first.
Install the Hugging Face CLI and log in:
uv tool install -U "huggingface_hub[cli]"
# Log in to your Hugging Face account and input your token
hf auth login
Visit the following link to obtain download permission for the required model: 🔗 https://huggingface.co/nvidia/Cosmos-Reason2-2B
Clone the Repository
# Install git-lfs
sudo apt install git-lfs && git lfs install
# Clone the repository
git clone --recurse-submodules https://github.com/NVIDIA/Isaac-GR00T
cd Isaac-GR00T
git submodule update --init --recursive
Docker Setup (Recommended)
Thor uses CUDA 13 and Python 3.12, which require a different dependency stack than x86 or Orin. Tested with JetPack 7.1. There are two ways to run on Thor: Docker (recommended) or bare metal.
Build the Thor container from the repo root:
cd docker && sudo bash build.sh --profile=thor
Download the finetuned model (run once, on the host):
uv run hf download nvidia/GR00T-N1.7-LIBERO \
--include "libero_10/config.json" \
"libero_10/embodiment_id.json" \
"libero_10/model-*.safetensors" \
"libero_10/model.safetensors.index.json" \
"libero_10/processor_config.json" \
"libero_10/statistics.json" \
--local-dir checkpoints/GR00T-N1.7-LIBERO
Start an interactive Docker session (recommended for multi-step TRT work):
# Add Docker to the user group
sudo usermod -aG docker $USER
docker run -it --rm --runtime nvidia --gpus all \
--ipc=host \
--ulimit memlock=-1 \
--ulimit stack=67108864 \
--network host \
-v "$(pwd)":/workspace/repo \
-v "${HF_HOME:-${HOME}/.cache/huggingface}":/root/.cache/huggingface \
-w /workspace/repo \
-e HF_TOKEN="${HF_TOKEN:-}" \
gr00t-thor \
bash
Bare Metal Setup
If you prefer not to use Docker, you can install dependencies directly:
bash scripts/deployment/thor/install_deps.sh
# In each new shell
source .venv/bin/activate
source scripts/activate_thor.sh
Verify Environment
You can run PyTorch inference to verify the environment is properly configured.
Before running the script, you need to log in to your Hugging Face account in advance and enter your token.
# Run inference on demo trajectories using PyTorch (no TRT setup needed):
uv run python scripts/deployment/standalone_inference_script.py \
--model-path checkpoints/GR00T-N1.7-LIBERO/libero_10 \
--dataset-path demo_data/libero_demo \
--embodiment-tag LIBERO_PANDA \
--traj-ids 0 1 2 3 4 \
--inference-mode pytorch \
--action-horizon 8
Dataset Format Conversion
GR00T only supports datasets in the LeRobot v2.1 format. However, the dataset format used when collecting data with the LeRobot framework is v3.0. To export the accelerated TensorRT engine model on Jetson, the dataset format needs to be converted to the same format used during GR00T training.
Place the following conversion script as scripts/convert_v3_to_v2.py in the Isaac-GR00T repository:
convert_v3_to_v2.py (click to expand)
#!/usr/bin/env python3
"""
LeRobot v3.0 to v2.1 Format Converter for Seeed REBOT-B601-DM Dataset
Converts a LeRobot v3.0 dataset to v2.1 format compatible with GR00T's
LeRobotEpisodeLoader.
Usage:
python convert_v3_to_v2.py \
--input /home/seeed/.cache/huggingface/lerobot/seeed_rebot_b601_dm/test \
--output /home/seeed/.cache/huggingface/lerobot/seeed_rebot_b601_dm/test_v2
The converter:
1. Reads episodes from meta/episodes/chunk-*/file-*.parquet
2. Splits data parquet into per-episode parquet files (v2.1 naming)
3. Extracts video clips per episode from v3.0 continuous MP4 files
4. Generates meta/modality.json, meta/tasks.jsonl, meta/episodes.jsonl
"""
import argparse
import json
import os
import shutil
import subprocess
from pathlib import Path
import pandas as pd
def _val(x):
"""Convert pyarrow/pandas scalar to native Python value."""
if hasattr(x, "item"):
return x.item()
elif hasattr(x, "tolist"):
return x.tolist()
return x
# ============================================================================
# 1. meta/modality.json
# ============================================================================
MODALITY_JSON = {
"video": {
"down_size": {
"type": "video",
"original_key": "observation.images.down_size"
},
"up_side": {
"type": "video",
"original_key": "observation.images.up_side"
}
},
"state": {
"single_arm": {
"start": 0,
"end": 6,
"original_key": "observation.state"
},
"gripper": {
"start": 6,
"end": 7,
"original_key": "observation.state"
}
},
"action": {
"single_arm": {
"start": 0,
"end": 6,
"original_key": "action"
},
"gripper": {
"start": 6,
"end": 7,
"original_key": "action"
}
},
"annotation": {
"language.language_instruction": {
"original_key": "task_index"
}
}
}
# ============================================================================
# 2. Convert tasks.parquet -> tasks.jsonl
# ============================================================================
def convert_tasks(input_dir: Path, output_dir: Path):
"""Convert tasks.parquet to tasks.jsonl."""
eps_dir = input_dir / "meta" / "episodes"
task_text = "unknown"
for chunk_dir in sorted(eps_dir.iterdir()):
if chunk_dir.is_dir():
for pf in sorted(chunk_dir.glob("*.parquet")):
df_eps = pd.read_parquet(pf, engine="pyarrow")
for _, row in df_eps.iterrows():
tasks_val = row.get("tasks", None)
if tasks_val is not None:
if hasattr(tasks_val, "tolist"):
tasks_val = tasks_val.tolist()
if isinstance(tasks_val, (list, tuple)) and len(tasks_val) > 0:
task_text = str(tasks_val[0])
break
if task_text != "unknown":
break
if task_text != "unknown":
break
tasks_path = input_dir / "meta" / "tasks.parquet"
df_tasks = pd.read_parquet(tasks_path, engine="pyarrow")
tasks = []
for _, row in df_tasks.iterrows():
ti_val = row["task_index"]
ti = int(ti_val.item()) if hasattr(ti_val, "item") else int(ti_val)
tasks.append({"task_index": ti, "task": task_text})
tasks_path_out = output_dir / "meta" / "tasks.jsonl"
with open(tasks_path_out, "w") as f:
for t in tasks:
f.write(json.dumps(t) + "\n")
print(f" Created tasks.jsonl ({len(tasks)} tasks)")
# ============================================================================
# 3. Convert episodes -> episodes.jsonl
# ============================================================================
def convert_episodes(input_dir: Path, output_dir: Path):
"""Convert episodes parquet files to episodes.jsonl."""
eps_dir = input_dir / "meta" / "episodes"
all_eps = []
for chunk_dir in sorted(eps_dir.iterdir()):
if chunk_dir.is_dir():
for pf in sorted(chunk_dir.glob("*.parquet")):
df = pd.read_parquet(pf, engine="pyarrow")
for _, row in df.iterrows():
def get(v):
val = row[v]
if hasattr(val, "tolist"):
val = val.tolist()
return val
tasks_val = get("tasks")
if isinstance(tasks_val, (list, tuple)) and len(tasks_val) > 0:
tasks_str = [str(tasks_val[0])]
else:
tasks_str = ["unknown"]
ep = {
"episode_index": int(get("episode_index")),
"length": int(get("length")),
"tasks": tasks_str,
}
all_eps.append(ep)
all_eps.sort(key=lambda x: x["episode_index"])
eps_path_out = output_dir / "meta" / "episodes.jsonl"
with open(eps_path_out, "w") as f:
for ep in all_eps:
f.write(json.dumps(ep) + "\n")
print(f" Created episodes.jsonl ({len(all_eps)} episodes)")
# ============================================================================
# 4. Split data parquet -> per-episode parquet files (v2.1 naming)
# ============================================================================
def convert_data_parquet(input_dir: Path, output_dir: Path):
"""
Split combined data parquet files into per-episode parquet files.
v3.0: data/chunk-000/file-000.parquet contains ALL episodes' data
v2.1: data/chunk-000/episode_000000.parquet (one per episode)
"""
data_dir = input_dir / "data"
output_data = output_dir / "data"
eps_dir = input_dir / "meta" / "episodes"
ep_data_map = {}
for chunk_dir in sorted(eps_dir.iterdir()):
if chunk_dir.is_dir():
for pf in sorted(chunk_dir.glob("*.parquet")):
df_eps = pd.read_parquet(pf, engine="pyarrow")
for _, erow in df_eps.iterrows():
ei = int(_val(erow["episode_index"]))
dci = int(_val(erow["data/chunk_index"]))
dfi = int(_val(erow["data/file_index"]))
ep_data_map[ei] = (dci, dfi)
chunk_files = {}
for chunk_dir in sorted(data_dir.iterdir()):
if not chunk_dir.is_dir():
continue
chunk_idx = int(chunk_dir.name.split("-")[1])
files = {}
for pf in sorted(chunk_dir.glob("*.parquet")):
file_idx = int(pf.stem.split("-")[1])
files[file_idx] = pf
chunk_files[chunk_idx] = files
for chunk_idx, files in sorted(chunk_files.items()):
output_chunk = output_data / f"chunk-{chunk_idx:03d}"
output_chunk.mkdir(parents=True, exist_ok=True)
ep_chunks = {}
for ep_idx, (dci, dfi) in sorted(ep_data_map.items()):
if dci == chunk_idx:
ep_chunks[ep_idx] = files[dfi]
for ep_idx, parquet_path in sorted(ep_chunks.items()):
df = pd.read_parquet(parquet_path, engine="pyarrow")
ep_rows = df[df["episode_index"] == ep_idx]
cols_to_keep = [c for c in ep_rows.columns if c in ("action", "observation.state", "task_index")]
ep_rows = ep_rows[cols_to_keep].reset_index(drop=True)
out_name = f"episode_{ep_idx:06d}.parquet"
out_path = output_chunk / out_name
ep_rows.to_parquet(out_path, engine="pyarrow", index=False)
total_eps = len(list(output_data.glob("chunk-*/episode_*.parquet")))
print(f" Converted data: {total_eps} episode parquet files")
# ============================================================================
# 5. Extract video clips per episode
# ============================================================================
def convert_videos(input_dir: Path, output_dir: Path):
"""
Extract per-episode video clips from v3.0 continuous MP4 files.
v3.0: videos/{cam}/chunk-{chunk:03d}/file-{file:03d}.mp4 (continuous, multi-episode)
v2.1: videos/{cam}/chunk-{chunk:03d}/episode_{ep:06d}.mp4 (one per episode)
"""
videos_dir = input_dir / "videos"
output_videos = output_dir / "videos"
camera_keys = [
"observation.images.down_size",
"observation.images.up_side",
]
eps_dir = input_dir / "meta" / "episodes"
ep_video_map = {}
for chunk_dir in sorted(eps_dir.iterdir()):
if chunk_dir.is_dir():
for pf in sorted(chunk_dir.glob("*.parquet")):
df_eps = pd.read_parquet(pf, engine="pyarrow")
for _, row in df_eps.iterrows():
ei = int(_val(row["episode_index"]))
ep_video_map[ei] = {}
for cam in camera_keys:
ep_video_map[ei][cam] = {
"chunk": int(_val(row[f"videos/{cam}/chunk_index"])),
"file": int(_val(row[f"videos/{cam}/file_index"])),
"from_ts": float(_val(row[f"videos/{cam}/from_timestamp"])),
"to_ts": float(_val(row[f"videos/{cam}/to_timestamp"])),
}
all_tasks = [(ep_idx, cam) for ep_idx, cam_data in sorted(ep_video_map.items()) for cam in camera_keys]
total = len(all_tasks)
done = 0
errors = 0
for ep_idx, cam in all_tasks:
vinfo = ep_video_map[ep_idx][cam]
src_name = f"file-{vinfo['file']:03d}.mp4"
src = videos_dir / cam / f"chunk-{vinfo['chunk']:03d}" / src_name
dest = output_videos / cam / f"chunk-{vinfo['chunk']:03d}" / f"episode_{ep_idx:06d}.mp4"
dest.parent.mkdir(parents=True, exist_ok=True)
if dest.exists():
done += 1
print(f"\r Extracting clips: {done}/{total} (errors: {errors})", end="", flush=True)
continue
duration = vinfo["to_ts"] - vinfo["from_ts"]
start = vinfo["from_ts"]
cmd = [
"ffmpeg", "-y",
"-ss", str(start),
"-i", str(src),
"-t", str(duration),
"-c:v", "libx264",
"-crf", "18",
"-preset", "fast",
"-an",
str(dest),
]
result = subprocess.run(cmd, capture_output=True, text=True)
done += 1
if result.returncode != 0:
errors += 1
print(f"\n ERROR ep{ep_idx} {cam}: {result.stderr[-300:]}")
print(f"\r Extracting clips: {done}/{total} (errors: {errors})", end="", flush=True)
print()
print(f" Extracted {total - errors} video clips ({len(ep_video_map)} episodes x {len(camera_keys)} cameras)")
# ============================================================================
# 6. Generate v2.1 info.json
# ============================================================================
def convert_info_json(input_dir: Path, output_dir: Path):
"""Update info.json for v2.1 format."""
info_path = input_dir / "meta" / "info.json"
with open(info_path) as f:
info = json.load(f)
info["data_path"] = "data/chunk-{episode_chunk:03d}/episode_{episode_index:06d}.parquet"
info["video_path"] = "videos/{video_key}/chunk-{episode_chunk:03d}/episode_{episode_index:06d}.mp4"
for key in ["data_files_size_in_mb", "video_files_size_in_mb", "splits"]:
info.pop(key, None)
info_path_out = output_dir / "meta" / "info.json"
with open(info_path_out, "w") as f:
json.dump(info, f, indent=2)
print(f" Created info.json")
# ============================================================================
# Main
# ============================================================================
def main():
parser = argparse.ArgumentParser(description="Convert LeRobot v3.0 dataset to v2.1 format")
parser.add_argument("--input", type=str, required=True, help="Input v3.0 dataset path")
parser.add_argument("--output", type=str, required=True, help="Output v2.1 dataset path")
args = parser.parse_args()
input_dir = Path(args.input)
output_dir = Path(args.output)
print(f"\nConverting LeRobot v3.0 -> v2.1")
print(f" Input: {input_dir}")
print(f" Output: {output_dir}")
(output_dir / "meta").mkdir(parents=True, exist_ok=True)
print("\n[1/6] Creating meta/modality.json...")
with open(output_dir / "meta" / "modality.json", "w") as f:
json.dump(MODALITY_JSON, f, indent=2)
print(" Created modality.json")
print("\n[2/6] Creating meta/tasks.jsonl...")
convert_tasks(input_dir, output_dir)
print("\n[3/6] Creating meta/episodes.jsonl...")
convert_episodes(input_dir, output_dir)
print("\n[4/6] Converting data parquet files...")
convert_data_parquet(input_dir, output_dir)
print("\n[5/6] Extracting video clips...")
convert_videos(input_dir, output_dir)
print("\n[6/6] Creating meta/info.json...")
convert_info_json(input_dir, output_dir)
print("\n[Done] Copying meta/stats.json...")
shutil.copy(input_dir / "meta" / "stats.json", output_dir / "meta" / "stats.json")
print(" Copied stats.json")
print(f"\nConversion complete: {output_dir}")
if __name__ == "__main__":
main()
Run the conversion script, for example:
python3 scripts/convert_v3_to_v2.py \
--input /home/seeed/.cache/huggingface/lerobot/seeed_rebot_b601_dm/test \
--output /home/seeed/.cache/huggingface/lerobot/seeed_rebot_b601_dm/test_v2
Export Model as TensorRT Engine
After verifying the environment and preparing the dataset, you can export the fine-tuned model to a TensorRT engine for accelerated inference on Jetson Thor.
cd Isaac-GR00T/
source .venv/bin/activate
source scripts/activate_thor.sh
python3 scripts/deployment/build_trt_pipeline.py \
--model-path /path/to/your/finetuned_model \
--dataset-path /home/seeed/.cache/huggingface/lerobot/seeed_rebot_b601_dm/test_v2 \
--embodiment-tag NEW_EMBODIMENT \
--output-dir ./seeed_rebot_b601_dm_deployment \
--precision bf16 \
--batch-size 1 \
--steps export,build
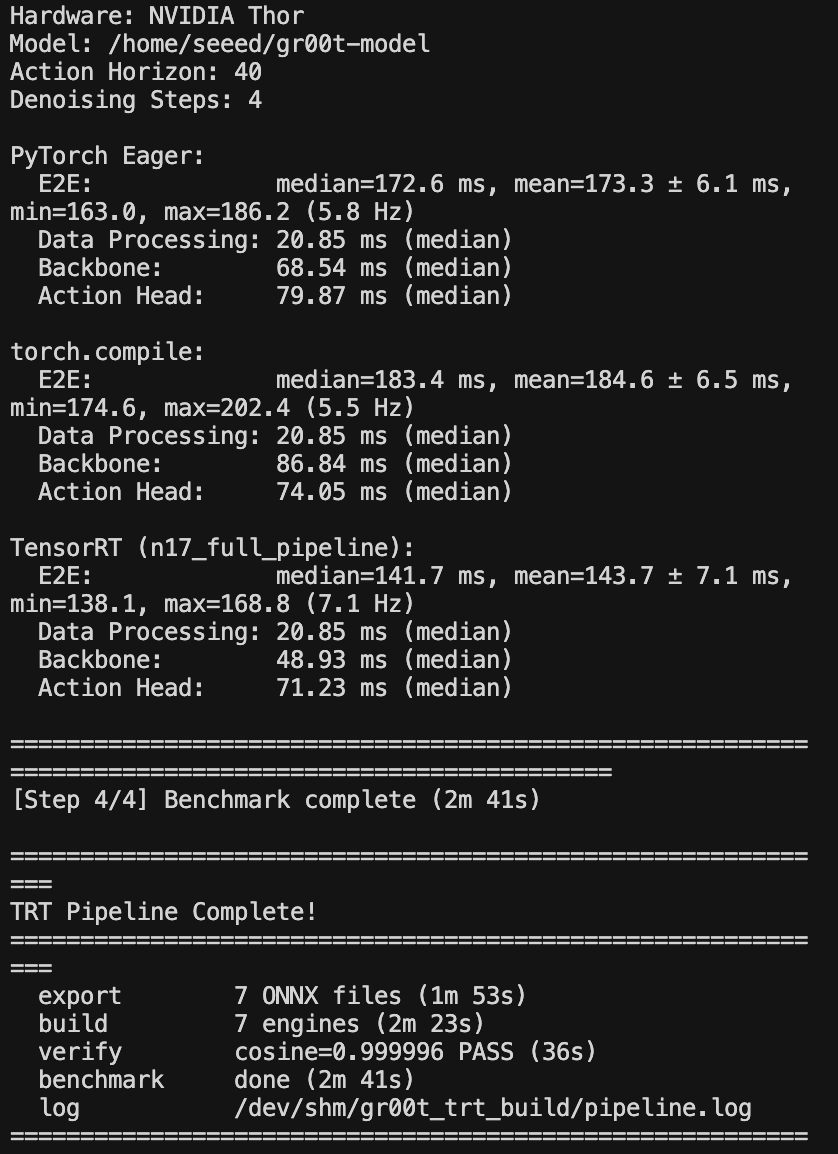
You will receive an accelerated and optimized model file in the engine format, as well as the intermediate converted ONNX file while waiting.
Inference on Jetson Thor
This chapter explains how to perform inference on Jetson using the GR00T N1.7 model that has been fine-tuned and accelerated with TensorRT.
Start the Inference Service
Use the following script to start the model service. Minor modifications have been made to the original script to support the inference of the TensorRT engine model.
run_gr00t_server.py (click to expand)
# SPDX-FileCopyrightText: Copyright (c) 2026 NVIDIA CORPORATION & AFFILIATES. All rights reserved.
# SPDX-License-Identifier: Apache-2.0
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
from dataclasses import dataclass
import importlib
import json
import os
from pathlib import Path
import sys
from gr00t.data.embodiment_tags import EmbodimentTag
from gr00t.data.types import ModalityConfig
from gr00t.policy.gr00t_policy import Gr00tPolicy
from gr00t.policy.replay_policy import ReplayPolicy
from gr00t.policy.server_client import PolicyServer
import tyro
DEFAULT_MODEL_SERVER_PORT = 5555
@dataclass
class ServerConfig:
"""Configuration for running the GR00T inference server."""
# Gr00t policy configs
model_path: str | None = None
"""Path to the model checkpoint directory"""
embodiment_tag: str = "new_embodiment"
"""Embodiment tag (name or value, case-insensitive). Run with --help to see known tags."""
device: str = "cuda"
"""Device to run the model on"""
# Replay policy configs
dataset_path: str | None = None
"""Path to the dataset for replay trajectory"""
modality_config_path: str | None = None
"""Path to the modality configuration file"""
execution_horizon: int | None = None
"""Policy execution horizon during inference. Required when --dataset-path is set (ReplayPolicy)."""
# Server configs
host: str = "0.0.0.0"
"""Host address for the server"""
port: int = DEFAULT_MODEL_SERVER_PORT
"""Port number for the server"""
strict: bool = True
"""Whether to enforce strict input and output validation"""
use_sim_policy_wrapper: bool = False
"""Whether to use the sim policy wrapper"""
# TensorRT inference configs
trt_engine_path: str = ""
"""Path to directory containing TensorRT engine files. If set, uses TRT inference instead of PyTorch."""
trt_mode: str = "n17_full_pipeline"
"""TRT mode: 'n17_full_pipeline', 'vit_llm_only', 'action_head', or 'dit_only'."""
def main(config: ServerConfig):
config.embodiment_tag = EmbodimentTag.resolve(config.embodiment_tag)
print("Starting GR00T inference server...")
print(f" Embodiment tag: {config.embodiment_tag}")
print(f" Model path: {config.model_path}")
print(f" Device: {config.device}")
print(f" Host: {config.host}")
print(f" Port: {config.port}")
if config.trt_engine_path:
print(f" TRT engines: {config.trt_engine_path}")
print(f" TRT mode: {config.trt_mode}")
# Create and start the server
if config.model_path is not None:
if config.model_path.startswith("/") and not os.path.exists(config.model_path):
raise FileNotFoundError(f"Model path {config.model_path} does not exist")
policy = Gr00tPolicy(
embodiment_tag=config.embodiment_tag,
model_path=config.model_path,
device=config.device,
strict=config.strict,
)
# Replace PyTorch modules with TensorRT engines if requested
if config.trt_engine_path:
deploy_dir = str(Path(__file__).resolve().parents[2] / "scripts" / "deployment")
if deploy_dir not in sys.path:
sys.path.insert(0, deploy_dir)
from trt_model_forward import setup_tensorrt_engines
setup_tensorrt_engines(policy, config.trt_engine_path, mode=config.trt_mode)
print(f" TensorRT engines loaded in '{config.trt_mode}' mode")
elif config.dataset_path is not None:
if config.execution_horizon is None:
raise ValueError(
"--execution-horizon is required when --dataset-path is set "
"(ReplayPolicy needs a positive integer to advance episodes)."
)
if config.execution_horizon <= 0:
raise ValueError(
f"--execution-horizon must be positive; got {config.execution_horizon}."
)
modality_configs: dict[str, ModalityConfig] | None = None
if config.modality_config_path is not None:
config_path = Path(config.modality_config_path)
if config_path.suffix == ".py":
sys.path.append(str(config_path.parent))
importlib.import_module(config_path.stem)
print(f"Loaded modality config: {config_path}")
elif config_path.suffix == ".json":
with open(config.modality_config_path, "r") as f:
raw = json.load(f)
modality_configs = {k: ModalityConfig(**v) for k, v in raw.items()}
else:
raise ValueError(
f"Unsupported modality config format: {config_path.suffix}. Use .py or .json"
)
if modality_configs is None:
from gr00t.configs.data.embodiment_configs import MODALITY_CONFIGS
modality_configs = MODALITY_CONFIGS.get(config.embodiment_tag.value)
if modality_configs is None:
raise ValueError(
f"No built-in modality config for embodiment tag "
f"'{config.embodiment_tag.name}' (value='{config.embodiment_tag.value}'). "
f"Available tags: {sorted(MODALITY_CONFIGS.keys())}. "
f"Please provide --modality-config-path (JSON or .py) "
f"when using this tag with ReplayPolicy."
)
policy = ReplayPolicy(
dataset_path=config.dataset_path,
modality_configs=modality_configs,
execution_horizon=config.execution_horizon,
strict=config.strict,
)
else:
raise ValueError("Either model_path or dataset_path must be provided")
# Apply sim policy wrapper if needed
if config.use_sim_policy_wrapper:
from gr00t.policy.gr00t_policy import Gr00tSimPolicyWrapper
policy = Gr00tSimPolicyWrapper(policy)
server = PolicyServer(
policy=policy,
host=config.host,
port=config.port,
)
print(f"\n✓ Server ready — listening on {config.host}:{config.port}\n")
try:
server.run()
except KeyboardInterrupt:
print("\nShutting down server...")
if __name__ == "__main__":
config = tyro.cli(ServerConfig)
main(config)
Run the inference server with the TensorRT engine:
python gr00t/eval/run_gr00t_server.py \
--model-path /home/seeed/checkpoint-10000/ \
--embodiment-tag NEW_EMBODIMENT \
--trt-engine-path /dev/shm/gr00t_trt_build/engines \
--trt-mode n17_full_pipeline
Make sure to replace the model path with your own fine-tuned model checkpoint path.
Real Robot Execution
Here, use the LeRobot environment to start the robotic arm and perform the task.
cd /path/to/lerobot
source .venv/bin/activate
cd Isaac-GR00T/gr00t/eval/real_robot
git clone https://github.com/zibochen6/rebot-arm-dm.git
uv pip install -e .
uv pip install --no-deps -e ../../../../
Start the robotic arm:
python eval_rebot_arm_dm.py \
--robot.type=seeed_b601_dm_follower \
--robot.id=b601_dm_follower \
--robot.port=/dev/ttyACM0 \
--robot.can_adapter=damiao \
--robot.cameras='{ front: {type: opencv, index_or_path: /dev/video0, width: 640, height: 480, fps: 30}, side: {type: opencv, index_or_path: /dev/video2, width: 640, height: 480, fps: 30}}' \
--policy_host=localhost \
--policy_port=5555 \
--lang_instruction="Grab markers and place into pen holder." \
--action_smoothing_alpha=0.05 \
--action_smoothing_max_delta=20.0 \
--action_smoothing_gripper_alpha=0.1
The first execution might report a failure to find the calibration file for the robotic arm. This is because the calibration file generated when using LeRobot to verify the reBot Arm has the name follower1.json, while the program is looking for b601_dm_follower.json. Rename the calibration file to solve the problem:
mv ~/.cache/huggingface/lerobot/calibration/robots/seeed_b601_dm_follower/follower1.json \
~/.cache/huggingface/lerobot/calibration/robots/seeed_b601_dm_follower/b601_dm_follower.json
References
- 🔗 https://developer.nvidia.com/embedded/jetpack
- 🔗 https://github.com/NVIDIA/Isaac-GR00T/tree/main
- 🔗 https://huggingface.co/nvidia/GR00T-N1.7-LIBERO
Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.