RS485 transmission of Vision AI V2 data

If you need to use the RS485 expansion board in conjunction with Vision AI V2, you will need to re-solder new header pins to the back of the RS485 expansion board.
Hadware Preparation
| Seeed Studio XIAO ESP32S3 | Grove Vision AI V2 | OV5647-62 FOV Camera Module for Raspberry Pi 3B+4B | Seeed Studio XIAO RS485-Expansion-Board |
|---|---|---|---|
 |  |  |  |
Connection method
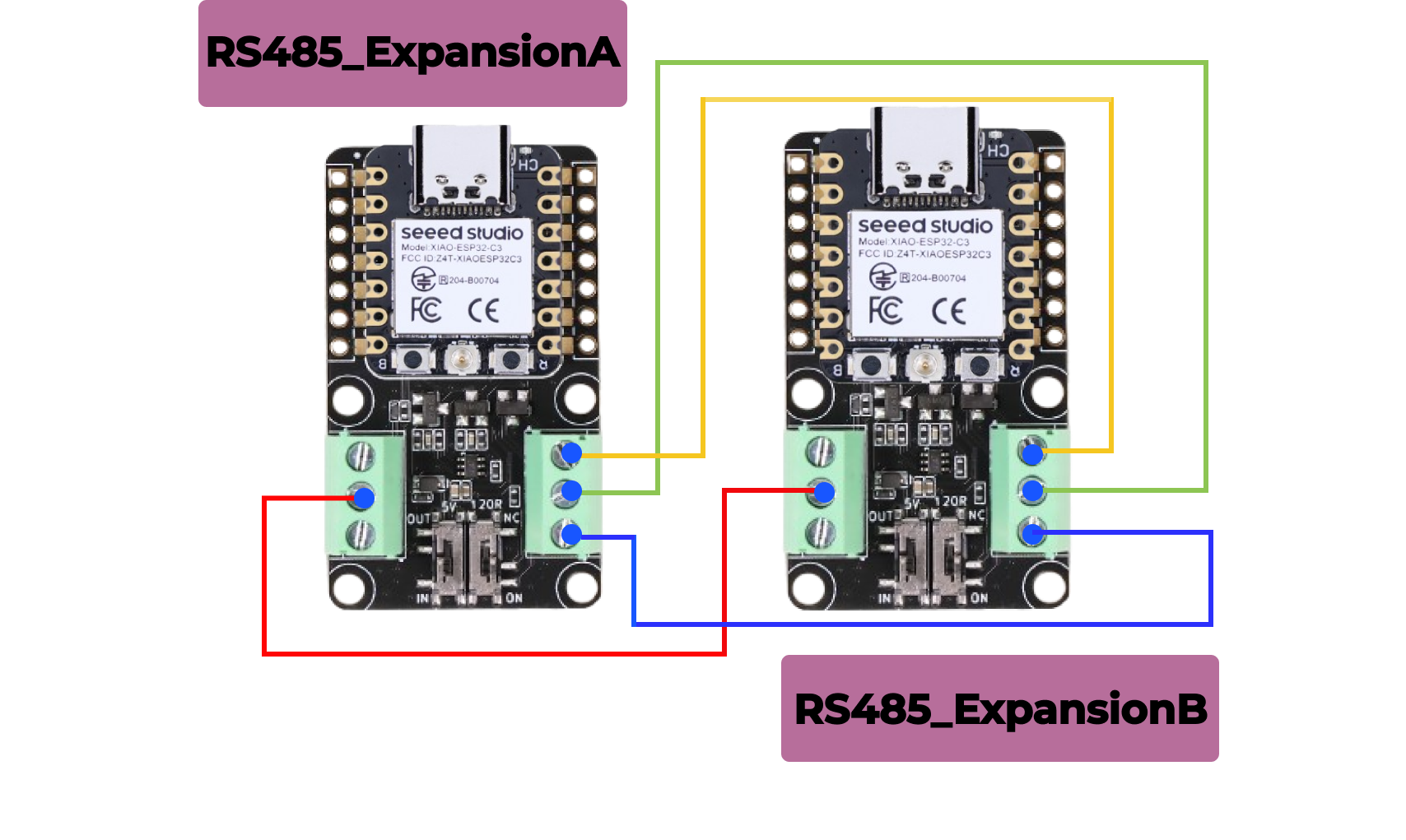
First of all, prepare two expansion boards, two XIAO series development boards, and one Vision AI V2, and connect the corresponding pins according to the diagram,This routine uses the XIAO ESP32C3 as a demo.
Step 1 . Prepare two RS485 expansion boards and two XIAO series development boards and connect the pins according to the following figure
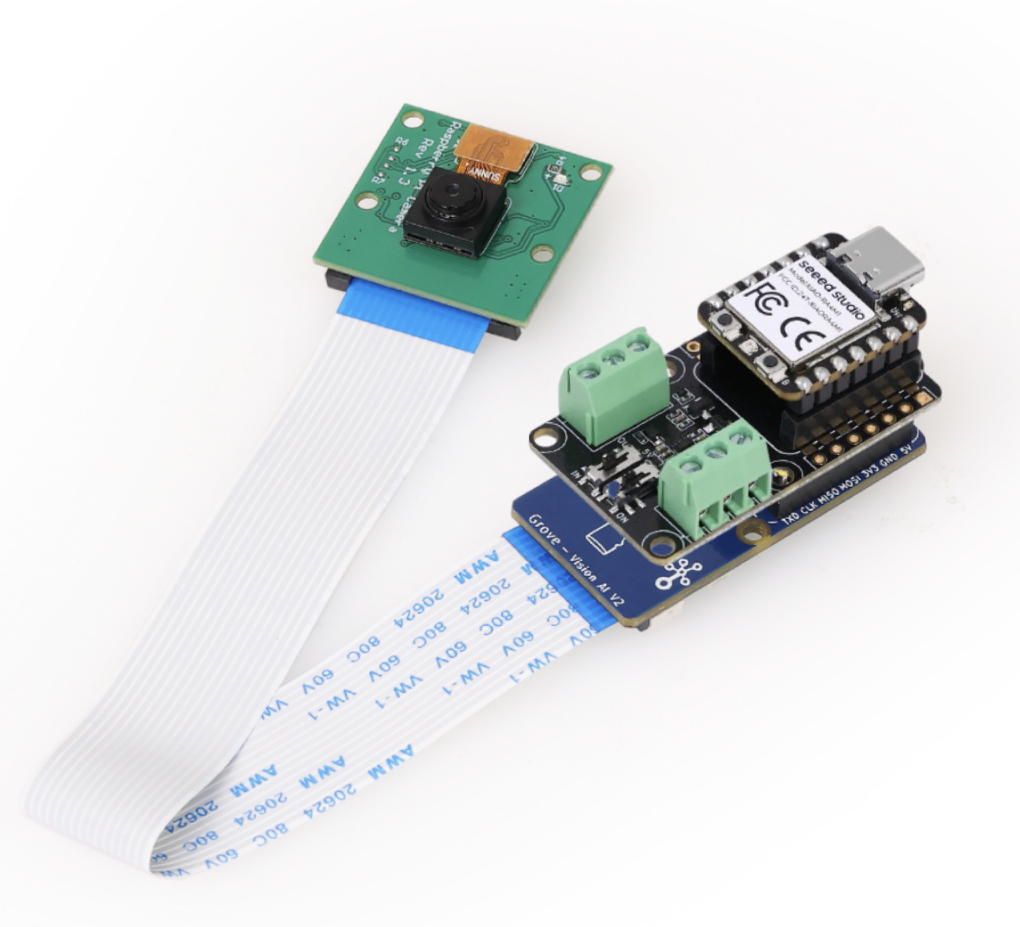
Step 2 . Prepare Vision AI V2 to be mounted on the reverse side of one of the two RS485 expansion boards as a sender
If you are using an RS485 expansion board for the first time and are not sure how to wire it, click on this link(https://wiki.seeedstudio.com/XIAO-RS485-Expansion-Board/)
If you don't know how to burn the model and add the model output code, click on this link(https://wiki.seeedstudio.com/grove_vision_ai_v2_software_support/), which will tell you each step in detail
For better subsequent use, do not skip these two steps!
Software Prearation
Sender Code
#include <Seeed_Arduino_SSCMA.h>
#ifdef ESP32
#include <HardwareSerial.h>
HardwareSerial Serial3(1);
// Define two Serial devices mapped to the two internal UARTs
HardwareSerial atSerial(0);
#else
#define atSerial Serial1
#endif
#define enable_pin D2 // Define the enable pin as D2
SSCMA AI;
void setup()
{
Serial3.begin(115200, SERIAL_8N1, 7, 6); // Initialize Serial3 with 115200 baud rate, 8 data bits, no parity, 1 stop bit
Serial.begin(9600); // Initialize Serial for debugging output
AI.begin(&atSerial); // Initialize the AI module with the AT serial
pinMode(enable_pin, OUTPUT); // Set the enable pin as an output
digitalWrite(enable_pin, HIGH); // Set the enable pin to high to enable the AI module
}
void loop()
{
if (!AI.invoke(1, false, true)) { // Invoke the AI to start processing
Serial.println("invoke success"); // Print success message
// Print performance metrics
Serial.print("perf: prepocess=");
Serial.print(AI.perf().prepocess);
Serial.print(", inference=");
Serial.print(AI.perf().inference);
Serial.print(", postpocess=");
Serial.println(AI.perf().postprocess);
// Loop through detected boxes
for (int i = 0; i < AI.boxes().size(); i++) {
Serial.print("Box[");
Serial.print(i);
Serial.print("] target=");
Serial.print(AI.boxes()[i].target);
Serial.print(", score=");
Serial.print(AI.boxes()[i].score);
Serial.print(", x=");
Serial.print(AI.boxes()[i].x);
Serial.print(", y=");
Serial.print(AI.boxes()[i].y);
Serial.print(", w=");
Serial.print(AI.boxes()[i].w);
Serial.print(", h=");
Serial.println(AI.boxes()[i].h);
}
// Loop through detected classes
for (int i = 0; i < AI.classes().size(); i++) {
Serial.print("Class[");
Serial.print(i);
Serial.print("] target=");
Serial.println(AI.classes()[i].target);
// Check the target class and send corresponding status
if (AI.classes()[i].target == 0) {
String status_a = "no people detected"; // Define status for no people detected
Serial3.println(status_a); // Send status to Serial3
Serial.println(status_a); // Print status to Serial monitor
} else if (AI.classes()[i].target == 1) {
String status_b = "people detected"; // Define status for people detected
Serial3.println(status_b); // Send status to Serial3
Serial.println(status_b); // Print status to Serial monitor
}
}
delay(1000); // Wait for 1 second before the next loop iteration
}
}
Code Detailed Functions
-
Library Inclusion
- Include the
HardwareSeriallibrary to use hardware serial functionality. - Include the
Seeed_Arduino_SSCMAlibrary for AI module control.
- Include the
-
Serial Object Creation
HardwareSerial Serial3(1);
HardwareSerial atSerial(0);Create Serial3 and atSerial objects for serial communication.
-
AI Object Creation
SSCMA AI;Create an instance of the SSCMA class for AI processing.
-
Performance Metrics
Serial.print("perf: prepocess=");
Serial.print(AI.perf().prepocess);
Serial.print(", inference=");
Serial.print(AI.perf().inference);
Serial.print(", postpocess=");
Serial.println(AI.perf().postprocess);Print performance metrics of the AI processing stages: preprocessing, inference, and postprocessing.
-
Detected Boxes Loop
for (int i = 0; i < AI.boxes().size(); i++) {
Serial.print("Box[");
Serial.print(i);
Serial.print("] target=");
Serial.print(AI.boxes()[i].target);
Serial.print(", score=");
Serial.print(AI.boxes()[i].score);
Serial.print(", x=");
Serial.print(AI.boxes()[i].x);
Serial.print(", y=");
Serial.print(AI.boxes()[i].y);
Serial.print(", w=");
Serial.print(AI.boxes()[i].w);
Serial.print(", h=");
Serial.println(AI.boxes()[i].h);
}Loop through detected boxes and print their details, including target, score, and bounding box coordinates.
-
Detected Classes Loop
for (int i = 0; i < AI.classes().size(); i++) {
Serial.print("Class[");
Serial.print(i);
Serial.print("] target=");
Serial.println(AI.classes()[i].target);Loop through detected classes and print their targets.
-
Macro Definition
pinMode(enable_pin, OUTPUT); // Set the enable pin as an output
digitalWrite(enable_pin, LOW);Define the enable pin as D2.
-
Send Message
// Check the target class and send corresponding status
if (AI.classes()[i].target == 0) {
String status_a = "no people detected"; // Define status for no people detected
Serial3.println(status_a); // Send status to Serial3
Serial.println(status_a); // Print status to Serial monitor
} else if (AI.classes()[i].target == 1) {
String status_b = "people detected"; // Define status for people detected
Serial3.println(status_b); // Send status to Serial3
Serial.println(status_b); // Print status to Serial monitor
}Determine whether a person is detected, if a person is detected it is sent to the receiver PEOPLE DETECTED, if no person is detected it is sent to the receiver NO PEOPLE DETECTED.
Receiver Code
#include <HardwareSerial.h>
HardwareSerial Serial3(1); // Use UART2
#define enable_pin D2 // Define the enable pin as D2
void setup() {
Serial.begin(115200); // Initialize the hardware serial with a baud rate of 115200
Serial3.begin(115200, SERIAL_8N1, 7, 6); // Initialize Serial3 with 115200 baud rate, 8 data bits, no parity, 1 stop bit (RX=D4(GPIO4), TX=D5(GPIO5))
// Wait for the hardware serial to be ready
while(!Serial3);
while(!Serial); // This line is generally unnecessary as Serial.begin() is ready immediately
pinMode(enable_pin, OUTPUT); // Set the enable pin as an output
digitalWrite(enable_pin, LOW); // Set the enable pin to low to enable the device
}
void loop() {
delay(100); // Delay for 100 milliseconds
// Check if there is data available from the hardware serial
if (Serial3.available()) {
String receivedData = Serial3.readStringUntil('\n'); // Read string until newline character
Serial.print("Received data: "); // Print label for received data
Serial.println(receivedData); // Directly print the received data
}
}
Code Detailed Functions
-
Library Inclusion
- Include the
HardwareSeriallibrary to use hardware serial functionality.
- Include the
-
Serial Object Creation
- Create a
Serial3object using UART2.
- Create a
-
Macro Definition
pinMode(enable_pin, OUTPUT); // Set the enable pin as an output
digitalWrite(enable_pin, LOW);Define the enable pin as D2.
-
Setup Function
Serial3.begin(115200, SERIAL_8N1, 7, 6);nitialize the main serial and Serial3, setting baud rate, data bits, etc.this is the serial port that communicates with the vision ai v2 to transfer data.
while(!Serial3);
while(!Serial);Wait for the all serial ports to be ready, set the enable pin as output, and pull it low to enable the device.
-
Loop Function
if (Serial3.available());: wCheck every 100 milliseconds if there is data available on Serial3.String receivedData = Serial3.readStringUntil('\n');:If data is available, read it until a newline character and print the received data to the main serial.
-
Print results
Serial.print("Received data: ");
Serial.println(receivedData);Printing the sender's message
Results Chart
However, the camera will send “people detected” when it recognizes a person and "no people detected" when it does not recognize a person, and the receiver will display the result of the sender's recognition on the serial port.

Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.