How to Build the Driver Module for Seeed's Jetson BSP
When the required .ko driver module is not available in reComputer/reServer, you can compile the driver module on Jetson and load it. This wiki demonstrates the specific steps and important notes, using JetPack 6.2 as an example.
1. Prepare workspace
This article uses L4T 36.4.3, which corresponds to JetPack 6.2 BSP, as an example to show how to compile the .ko driver module for pl2303 (a USB-to-serial related driver) on reComputer/reServer.
This tutorial downloads the source code on the Jetson and compiles the .ko kernel modules.
First, download the BSP source code from NVIDIA’s official website according to your L4T version.
If you're unsure about the relationship between L4T versions and JetPack versions, you can refer to this link: https://developer.nvidia.com/embedded/jetpack-archive.
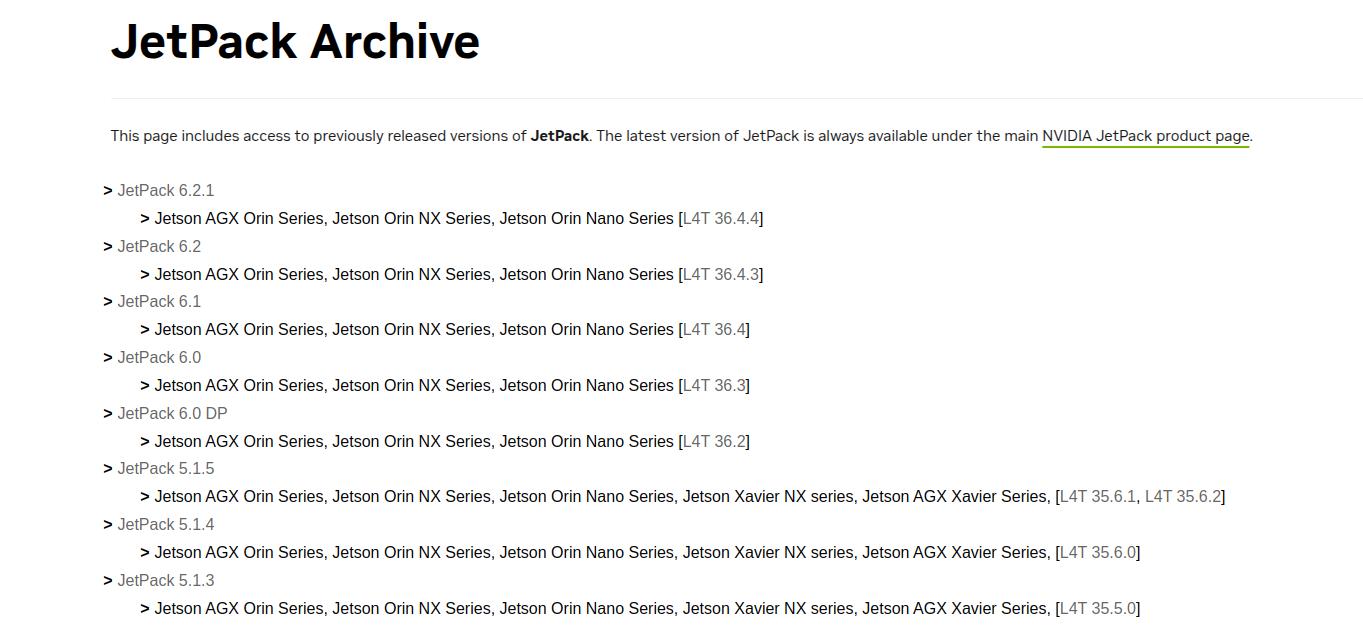
Search for the specific L4T (Linux for Tegra) release you want to compile, e.g.:
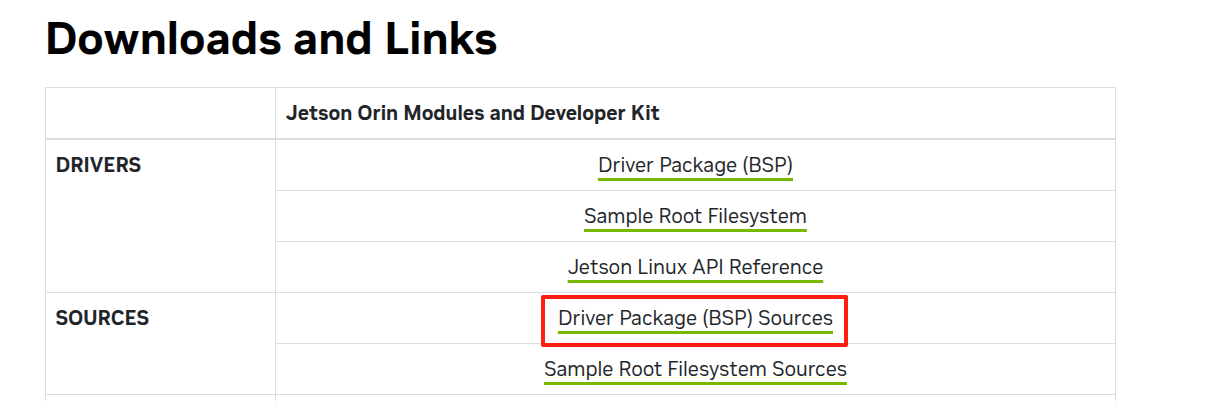
Download the corresponding BSP source code from NVIDIA’s website:
Place the downloaded BSP source code archive into your working directory, then run the following commands in the terminal to fully extract it:
# First extract the main file
tar -xjf public_sources.tbz2
# Enter the extracted directory
cd Linux_for_Tegra/source
# Recursively extract all .tbz2, .tar.bz2, .tar.gz, .tgz, .tar.xz files
find . -type f \( -name "*.tbz2" -o -name "*.tar.bz2" -o -name "*.tar.gz" -o -name "*.tgz" -o -name "*.tar.xz" \) -exec bash -c '
dir=$(dirname "$1")
filename=$(basename "$1")
cd "$dir"
if [[ "$filename" == *.tbz2 || "$filename" == *.tar.bz2 ]]; then
tar -xjf "$filename"
elif [[ "$filename" == *.tar.gz || "$filename" == *.tgz ]]; then
tar -xzf "$filename"
elif [[ "$filename" == *.tar.xz ]]; then
tar -xJf "$filename"
fi
cd - > /dev/null
' _ {} \;
After extracting all the archives, navigate to Linux_for_Tegra/source and locate the driver source path based on keywords:
sudo find . -type f -name "*<keyword>*"
# For exmaple:
sudo find . -type f -name "*pl2303*"

Create a new workspace for compilation. According to the printed source path in the terminal, copy the driver source code into this workspace.
Then, inside the workspace, create a Makefile for compilation with the following content:
obj-m += pl2303.o
all:
make -C /lib/modules/$(shell uname -r)/build M=$(PWD) modules
clean:
make -C /lib/modules/$(shell uname -r)/build M=$(PWD) clean
Here, pl2303.o should be replaced with the corresponding name of the driver you want to compile.
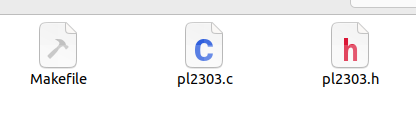
The workspace will look similar to the figure below, containing both the source file and the Makefile:
Before compiling, you need to establish a symbolic link:
# Remove existing redundant directory if it exists
sudo rm -r /lib/modules/$(uname -r)/build
# Create symbolic link
sudo ln -s /usr/src/linux-headers-$(uname -r)-ubuntu22.04_aarch64/3rdparty/canonical/linux-jammy/kernel-source /lib/modules/$(uname -r)/build
After creating the symbolic link, run the following command in your workspace to compile and obtain the .ko driver module:
make
After compilation, the .ko file will be generated in the current directory:
Next, copy the .ko file to the correct target path:
sudo cp pl2303.ko /lib/modules/$(uname -r)/kernel/drivers/usb/serial/
For compiled .ko driver modules, the target path prefix is always /lib/modules/$(uname -r)/kernel/. The suffix depends on the type of driver module and can be inferred from the relative path of the source code, which gives the full target path:

After copying to the target path, load the .ko driver module:
sudo depmod -a
sudo modprobe pl2303
Once successfully loaded, you can run modinfo <driver_name> to verify:

Resources
Tech Support & Product Discussion
Thank you for choosing our products! We are here to provide you with different support to ensure that your experience with our products is as smooth as possible. We offer several communication channels to cater to different preferences and needs.