IsaacLabでSoArm101ポリシーを訓練する
はじめに
このwikiでは、Isaac Labを使用してSO-ARM100/101ロボットアームのポリシーを強化学習で訓練およびテストする方法を紹介します。
📌前提条件
- Nvidia GPU搭載のUbuntu PC
CUDAドライバーやCondaがインストールされていない場合は、まずそれらをセットアップしてください。
始めましょう
🚀 ステップ1. Isaac Labのインストール
NVIDIA Isaac™ Labは、研究者や開発者がロボットポリシーを効率的に訓練するのに役立つロボット学習用のオープンソース統合フレームワークです。
Ubuntu PCのターミナルで以下のコマンドを実行してください:
# Conda環境の作成とアクティベート
conda create -n isaaclab python=3.10
conda activate isaaclab
# PyTorch(GPU版)のインストール
pip install torch==2.7.0 torchvision==0.22.0 --index-url https://download.pytorch.org/whl/cu128
# pipのアップグレード
pip install --upgrade pip
# Isaac Sim(拡張機能付き)のインストール
pip install 'isaacsim[all,extscache]==4.5.0' --extra-index-url https://pypi.nvidia.com
# IsaacLabリポジトリのクローン
cd ~/Documents
git clone https://github.com/isaac-sim/IsaacLab.git
# 依存関係のインストール
sudo apt install cmake build-essential
# セットアップの初期化
cd IsaacLab
./isaaclab.sh --install
インストールを確認するために以下のコマンドを実行してください:
./isaaclab.sh -p scripts/tutorials/00_sim/create_empty.py
成功すると、空のIsaac Simウィンドウが表示されます。
🤖 ステップ2. isaac_so_arm101プロジェクトのインストール
このリポジトリは、Isaac Labを使用してSO‑ARM100およびSO‑ARM101ロボット用のタスクを実装しています。これは、LycheeAI Hubシリーズプロジェクト:SO‑ARM101 × Isaac Sim × Isaac Labのいくつかのチュートリアルの基盤として機能します。
以下のコマンドを実行してください:
cd ~/Documents
git clone https://github.com/MuammerBay/isaac_so_arm101.git
cd isaac_so_arm101
# プロジェクトの依存関係をインストール
python -m pip install -e source/SO_100
# 環境のテスト
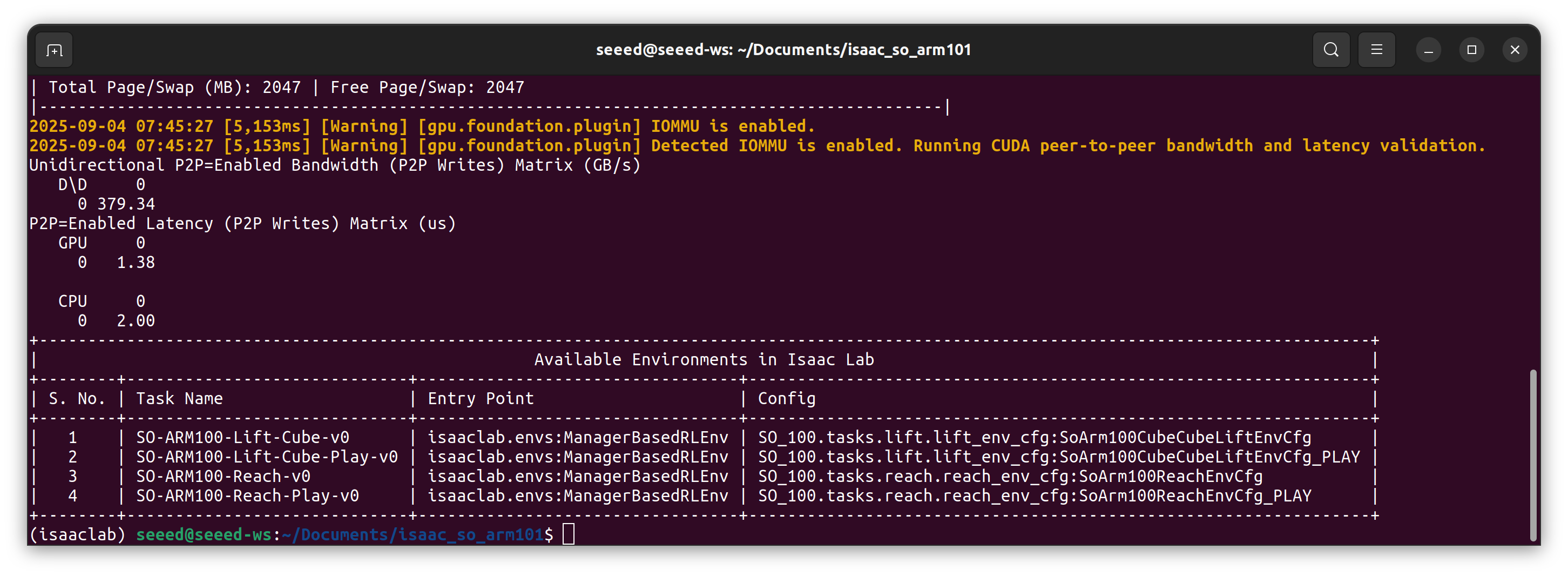
python scripts/list_envs.py
isaac_so_arm101プロジェクトが正常にインストールされると、ターミナルウィンドウに以下のログが出力されます:
🎯 ステップ3. 訓練の開始
以下のコマンドで訓練を開始してください:
python scripts/rsl_rl/train.py --task SO-ARM100-Reach-v0
これによりIsaac Simウィンドウが開き、訓練プロセスをリアルタイムで観察できます。起動コマンドに--headlessパラメータを追加すると、訓練プロセスを高速化できます。
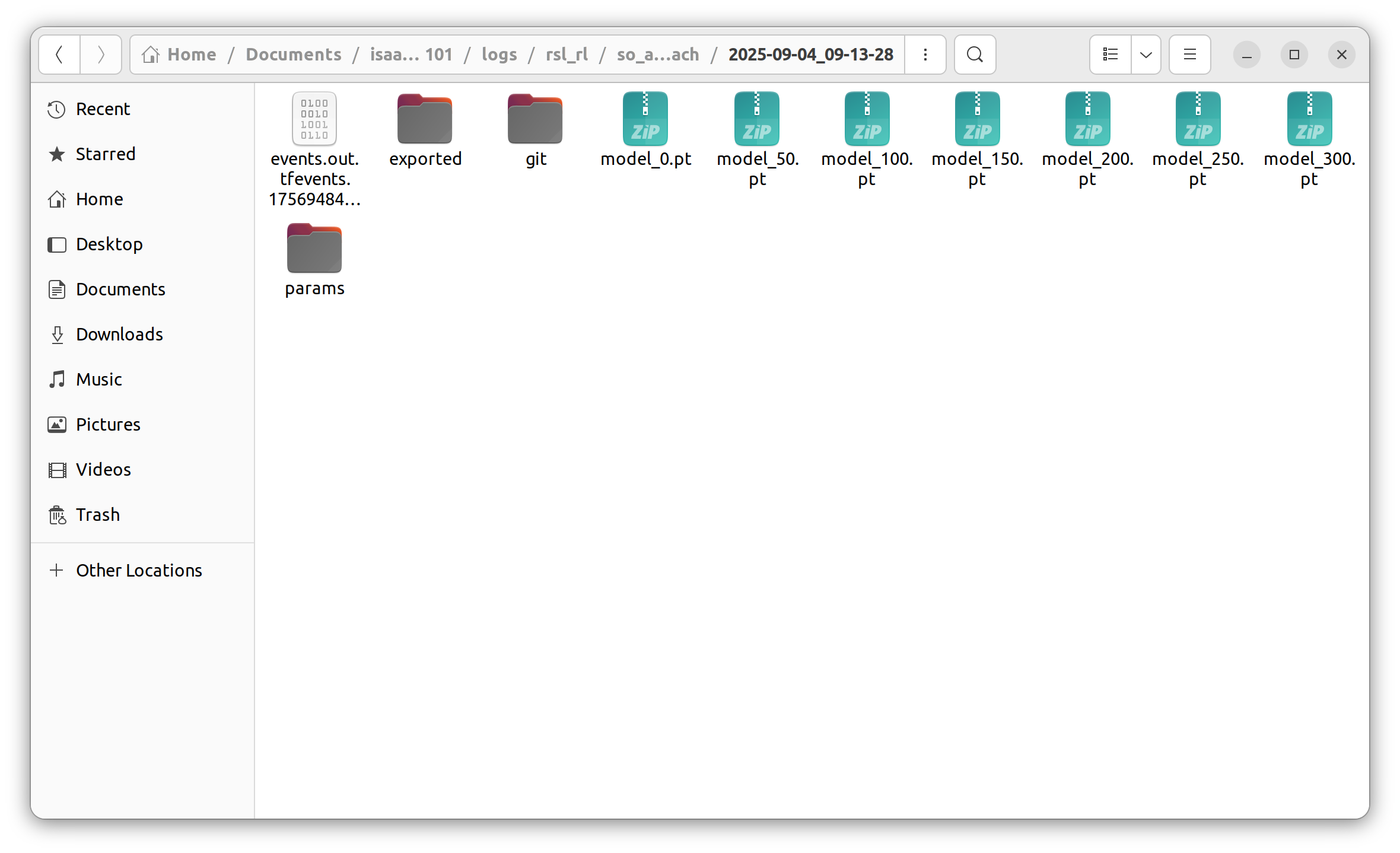
訓練後、モデルの重みは以下の場所に保存されます:
~/Documents/isaac_so_arm101/logs/rsl_rl/so_arm100_reach
🧪 ステップ4. モデルのテスト
訓練されたモデルを以下のコマンドでテストしてください:
python scripts/rsl_rl/play.py --task SO-ARM100-Reach-Play-v0
テスト中、ターゲット位置は定義された範囲内でランダムに生成され、訓練されたモデルがロボットアームを駆動してそれらのターゲットに到達させます。
参考文献
- https://lycheeai-hub.com/project-so-arm101-x-isaac-sim-x-isaac-lab-tutorial-series
- https://github.com/MuammerBay/isaac_so_arm101
- https://github.com/huggingface/lerobot
- https://github.com/isaac-sim/IsaacLab
- https://github.com/leggedrobotics/rsl_rl
技術サポート & 製品に関するディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社製品での体験が可能な限りスムーズになるよう、さまざまなサポートを提供しています。さまざまな好みやニーズに対応するため、複数のコミュニケーションチャンネルを用意しています。