Raspberry Pi用2チャンネルCAN BUS FDシールド

これはRaspberry Pi用のCAN BUSシールド(以下、2チャンネルPi HATと呼びます)で、2チャンネルのCAN BUS I/Oを備え、CAN FDをサポートしています。CAN FDは、より高速な伝送速度(最大8Mbps)をサポートします。
また、オンボードに2つの120Ω終端抵抗があり、スイッチで制御可能です。

バージョンの説明
Raspberry Pi用CAN BUSシールドには3つのバージョンがあります。これらの3つのバージョンはすべてRaspberry Piプラットフォームで完全に動作します。Raspberry Piプラットフォームを使用している場合、このセクションをスキップしても構いません。
現在、このCAN BUSシールドはJetson Nano Developer Kit(SDカード)をサポートしていますが、eMMCを搭載したJetson Nano(reComputer J1010/J1020v2)はサポートしていません。CAN BUSシールドの異なるバージョンは機能性に影響を与えるため、Jetson Nanoプラットフォームで使用する場合は、以下の表をよく確認してください。
| 製品名 | チップ | RPiの状態 | Jetson Nanoの状態 |
|---|---|---|---|
| Raspberry Pi用2チャンネルCAN-BUS(FD)シールド (MCP2517FD) | MCP2517FD | 2チャンネル | 1チャンネル(can0) |
| Raspberry Pi用2チャンネルCAN-BUS(FD)シールド (MCP2518FD) | MCP2518FD | 2チャンネル | 2チャンネル |
ご覧の通り、Raspberry Pi用2チャンネルCAN-BUS(FD)シールド(MCP2517FD)には2つのバージョンのチップが使用されており、両チャンネルがRaspberry Piで動作しますが、Jetson Nanoプラットフォームでは1チャンネル(CAN0)のみが動作します!
特徴
- 高速転送レート:8Mbps@10m 20AWGシールドケーブル / 1Mbps@40m 20AWGシールドケーブル
- 安定した電源供給、Raspberry Pi電源またはDC電源を選択可能
- Raspberry Pi 2、Raspberry Pi 3、Raspberry Pi 4、Raspberry Pi Zeroに対応
- ワンボタンで120Ω終端抵抗を設定可能
- CAN FDをサポート
ハードウェア概要




取り付けガイド

組み立て時にCAN BUSポートの金属端子とRaspberry PiのHDMIインターフェース間で短絡を防ぐためにナイロン柱を使用していることがわかります。そのため、必ず図のようにナイロン柱を組み立ててください。
仕様
| パラメータ | 値 |
|---|---|
| 電源入力 | 12V~24V DC Raspberry Pi GPIO 5V |
| CAN FDコントローラー | MCP2517FD |
| CAN FDトランシーバー | MCP2557FD |
| CAN FDチャンネル | 2 |
| 転送速度 | 8Mbps@10m 20AWGシールドケーブル 1Mbps@40m 20AWGシールドケーブル |
| Piとの通信インターフェース | SPI |
| Groveインターフェース | Grove I2C x2 |
対応プラットフォーム
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
はじめに
必要な材料
| Raspberry Pi | 2-Channel CAN-BUS(FD) Shield | Arduinoボード | CAN-BUS Shield V2 |
|---|---|---|---|
 |  |  |  |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
💡 注意: Raspberry Pi用2チャンネルCAN BUS FDシールドはカーネルバージョン6.6.42以下でのみサポートされています。
また、2本のオス-オスジャンパーと、これらのボードに電力を供給するための電源ケーブルが必要です。
ハードウェア接続
-
ステップ1. 取り付けガイドに従って、2-Channel CAN-BUS(FD) ShieldをRaspberry Piに接続します。
-
ステップ2. CAN BUS Shield V2をSeeeduino(またはArduino)ボードに接続します。
-
ステップ3. ジャンパーを使用して両方のシールドのCAN端子を接続します。
| 2-Channel CAN-BUS(FD) Shield | CAN-BUS Shield V2 |
|---|---|
| CAN_0_L | CANL |
| CAN_0_H | CANH |
シールドの裏側にシルクスクリーンが記載されています。
- ステップ4. Raspberry PiとSeeeduinoに電力を供給します。

ソフトウェア
CAN-HATのインストール
- ステップ1. config.txtファイルを開きます
sudo nano /boot/config.txt
- ステップ2. ファイルの末尾に以下の行を追加します
dtoverlay=seeed-can-fd-hat-v2
-
ステップ3. Ctrl + xを押し、yを押してEnterを押し、ファイルを保存します
-
ステップ4. Raspberry Piを再起動します
sudo reboot
- ステップ5. カーネルログを確認して、CAN-BUS HATが正常に初期化されたかどうかを確認します。また、ifconfigの結果リストにcan0とcan1が表示されます。
pi@raspberrypi:~ $ dmesg | grep spi
[ 6.178008] mcp25xxfd spi0.0 can0: MCP2517FD rev0.0 (-RX_INT +MAB_NO_WARN +CRC_REG +CRC_RX +CRC_TX +ECC -HD m:20.00MHz r:18.50MHz e:0.00MHz) successfully initialized.
[ 6.218466] mcp25xxfd spi0.1 (unnamed net_device) (uninitialized): Failed to detect MCP25xxFD (osc=0x00000000).
pi@raspberrypi:~ $ ifconfig -a
can0: flags=128<NOARP> mtu 16
unspec 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00 txqueuelen 10 (UNSPEC)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
device interrupt 166
can1: flags=128<NOARP> mtu 16
unspec 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00 txqueuelen 10 (UNSPEC)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
device interrupt 167
eth0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500
inet 10.0.0.13 netmask 255.255.255.0 broadcast 10.0.0.255
inet6 fe80::44cc:eeb8:47a0:7fce prefixlen 64 scopeid 0x20<link>
ether b8:27:eb:25:d4:e0 txqueuelen 1000 (Ethernet)
RX packets 299 bytes 27437 (26.7 KiB)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 172 bytes 25974 (25.3 KiB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
lo: flags=73<UP,LOOPBACK,RUNNING> mtu 65536
inet 127.0.0.1 netmask 255.0.0.0
inet6 ::1 prefixlen 128 scopeid 0x10<host>
loop txqueuelen 1000 (Local Loopback)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
wlan0: flags=4098<BROADCAST,MULTICAST> mtu 1500
ether b8:27:eb:70:81:b5 txqueuelen 1000 (Ethernet)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
- ステップ 6. CAN FD プロトコルを設定し、データビットレートを 8M の速度に設定します。詳細な使用方法についてはカーネルドキュメントを参照してください
sudo ip link set can0 up type can bitrate 1000000 dbitrate 8000000 restart-ms 1000 berr-reporting on fd on
sudo ip link set can1 up type can bitrate 1000000 dbitrate 8000000 restart-ms 1000 berr-reporting on fd on
sudo ifconfig can0 txqueuelen 65536
sudo ifconfig can1 txqueuelen 65536
- ステップ 7. 2つのターミナルウィンドウを開き、それぞれのウィンドウで以下のコマンドを入力して CAN FD プロトコルをテストします。
#データ送信
cangen can0 -mv
#データ受信
candump can0
ジャンパーを使用して 2 つのチャンネルを接続することで、CAN-BUS をテストできます: 0_L ←→ 1_L, 0_H ←→ 1_H。
Arduino CAN BUS シールドとの通信
このデモでは、2つのチャンネルのうち1つだけを使用します。
Arduino CAN BUS シールド用に Arduino コードを提供しています。Arduino の使い方がわからない場合は、こちらを参照してください。
2 チャンネル Pi Hat では、送信と受信に 2 つの方法があります。can-util/cangen と Python コードの両方を使用できます。
CAN BUS シールドで送信し、CAN HAT で受信
Arduino CAN BUS シールド用コード:
// デモ: CAN-BUS シールド、データ送信
// [email protected]
#include <mcp_can.h>
#include <SPI.h>
// v1.1以降のバージョンのCSピンはデフォルトでD9
// v0.9bおよびv1.0はデフォルトでD10
const int SPI_CS_PIN = 9;
MCP_CAN CAN(SPI_CS_PIN); // CSピンを設定
void setup()
{
Serial.begin(115200);
while (CAN_OK != CAN.begin(CAN_500KBPS)) // CANバスを初期化: ボーレート = 500k
{
Serial.println("CAN BUS シールドの初期化に失敗しました");
Serial.println("CAN BUS シールドを再初期化します");
delay(100);
}
Serial.println("CAN BUS シールドの初期化に成功しました!");
}
unsigned char stmp[8] = {0, 0, 0, 0, 0, 0, 0, 0};
void loop()
{
// データ送信: ID = 0x00、標準フレーム、データ長 = 8、stmp: データバッファ
stmp[7] = stmp[7]+1;
if(stmp[7] == 100)
{
stmp[7] = 0;
stmp[6] = stmp[6] + 1;
if(stmp[6] == 100)
{
stmp[6] = 0;
stmp[5] = stmp[6] + 1;
}
}
CAN.sendMsgBuf(0x00, 0, 8, stmp);
delay(100); // 100msごとにデータを送信
}
// ファイル終了
Raspberry Pi の設定を行い、can-util を使用して受信できます。
# 500k ボーレートを設定
pi@raspberrypi:~ $ sudo ip link set can0 up type can bitrate 500000
pi@raspberrypi:~ $ ip -details link show can0
3: can0: <NOARP,UP,LOWER_UP,ECHO> mtu 16 qdisc pfifo_fast state UNKNOWN mode DEFAULT group default qlen 10
link/can promiscuity 0
can state ERROR-ACTIVE (berr-counter tx 0 rx 0) restart-ms 0
bitrate 500000 sample-point 0.875
tq 25 prop-seg 34 phase-seg1 35 phase-seg2 10 sjw 1
mcp25xxfd: tseg1 2..256 tseg2 1..128 sjw 1..128 brp 1..256 brp-inc 1
mcp25xxfd: dtseg1 1..32 dtseg2 1..16 dsjw 1..16 dbrp 1..256 dbrp-inc 1
clock 40000000numtxqueues 1 numrxqueues 1 gso_max_size 65536 gso_max_segs 65535
# データ受信
pi@raspberrypi:~ $ candump can0
can0 000 [8] 00 00 00 00 00 00 00 05
can0 000 [8] 00 00 00 00 00 00 00 06
can0 000 [8] 00 00 00 00 00 00 00 07
can0 000 [8] 00 00 00 00 00 00 00 08
can0 000 [8] 00 00 00 00 00 00 00 09
can0 000 [8] 00 00 00 00 00 00 00 0A
can0 000 [8] 00 00 00 00 00 00 00 0B
can0 000 [8] 00 00 00 00 00 00 00 0C
can0 000 [8] 00 00 00 00 00 00 00 0D
can0 000 [8] 00 00 00 00 00 00 00 0E
can0 000 [8] 00 00 00 00 00 00 00 0F
can0 000 [8] 00 00 00 00 00 00 00 10
can0 000 [8] 00 00 00 00 00 00 00 11
can0 000 [8] 00 00 00 00 00 00 00 12
can0 000 [8] 00 00 00 00 00 00 00 13
can0 000 [8] 00 00 00 00 00 00 00 14
can0 000 [8] 00 00 00 00 00 00 00 15
can0 000 [8] 00 00 00 00 00 00 00 16
can0 000 [8] 00 00 00 00 00 00 00 17
can0 000 [8] 00 00 00 00 00 00 00 18
can0 000 [8] 00 00 00 00 00 00 00 19
can0 000 [8] 00 00 00 00 00 00 00 1A
can0 000 [8] 00 00 00 00 00 00 00 1B
can0 000 [8] 00 00 00 00 00 00 00 1C
can0 000 [8] 00 00 00 00 00 00 00 1D
または、Python コードを使用して CAN データを取得することもできます。Python を使用して CAN データを受信するには、まず python-can をインストールする必要があります。
# python-can をインストール
sudo pip3 install python-can
新しい Python ファイルを開き、以下のコードをコピーして can_test.py として保存します。
import can
can_interface = 'can0'
bus = can.interface.Bus(can_interface, bustype='socketcan_native')
while True:
message = bus.recv(1.0) # タイムアウトは秒単位。
if message is None:
print('タイムアウトが発生しました。メッセージがありません。')
print(message)
Python コードを実行すると、以下のような結果が得られます。
pi@raspberrypi:~ $ python3 can_test.py
Timestamp: 1550471771.628215 ID: 0000 S DLC: 8 00 00 00 00 00 00 0e 63 Channel: can0
Timestamp: 1550471772.629302 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 00 Channel: can0
Timestamp: 1550471773.630658 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 01 Channel: can0
Timestamp: 1550471774.632018 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 02 Channel: can0
Timestamp: 1550471775.633395 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 03 Channel: can0
Timestamp: 1550471776.634774 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 04 Channel: can0
Timestamp: 1550471777.636135 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 05 Channel: can0
Timestamp: 1550471778.637481 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 06 Channel: can0
Timestamp: 1550471779.638859 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 07 Channel: can0
Timestamp: 1550471780.640222 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 08 Channel: can0
Timestamp: 1550471781.641602 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 09 Channel: can0
Timestamp: 1550471782.642970 ID: 0000 S DLC: 8 00 00 00 00 00 00 0f 0a Channel: can0
CAN BUS Shield 受信と CAN HAT 送信
Raspberry Pi では、cangen を使用してランダムなパッケージを送信できます:
pi@raspberrypi:~ $ cangen can0 -v
can0 442#14.C4.1A.1A.C2.25.79.25
can0 748#4E.C7.8B.0B.6E.B9.15.77
can0 1E4#64.D4.62.22.2F.A6.BF
can0 1DD#69.6F.61.33.1F.59.E4.7C
can0 63D#
can0 764#2C.C1.E3
can0 68B#11.9C.63.6D.EA.E9.4B
can0 329#DA.06.2C.34.6C
can0 7DD#2E.F5.E0.2A.26.77.58.38
can0 1BE#94.30.6E.2F.A2.7B.E3.1D
can0 654#D1.21.A3.58.31.E8.51.5F
can0 706#51.41.36.5C.43.8D.AE.5D
can0 34A#89.F2.DE.33.AE.52.38.6C
can0 6AC#C1.35.83.41.37
can0 38C#22.AF
can0 208#22.8E.97.58.E5.69.F7.2C
Arduino では、以下のコードを使用して CAN データを受信できます。
// デモ: CAN-BUS Shield、割り込みモードでデータを受信
// 割り込みモードでは、データの到着間隔が速すぎてはいけません。20ms以上必要です。
// それ以外の場合はチェックモードを使用してください。
// loovee, 2014-6-13
#include <SPI.h>
#include "mcp_can.h"
// v1.1以降のバージョンのCSピンはデフォルトでD9
// v0.9bおよびv1.0はデフォルトでD10
const int SPI_CS_PIN = 9;
MCP_CAN CAN(SPI_CS_PIN); // CSピンを設定
unsigned char flagRecv = 0;
unsigned char len = 0;
unsigned char buf[8];
char str[20];
void setup()
{
Serial.begin(115200);
while (CAN_OK != CAN.begin(CAN_500KBPS)) // CANバスを初期化: ボーレート = 500k
{
Serial.println("CAN BUS Shield 初期化失敗");
Serial.println("CAN BUS Shield を再初期化します");
delay(100);
}
Serial.println("CAN BUS Shield 初期化成功!");
attachInterrupt(0, MCP2515_ISR, FALLING); // 割り込みを開始
}
void MCP2515_ISR()
{
flagRecv = 1;
}
void loop()
{
if(flagRecv)
{ // データを受信したか確認
flagRecv = 0; // フラグをクリア
// 保留中のすべてのメッセージを反復処理
// バスが飽和しているか、MCUがビジー状態の場合、
// 両方のRXバッファが使用中であり、単一のメッセージを読み取ってもIRQ条件がクリアされない可能性があります。
while (CAN_MSGAVAIL == CAN.checkReceive())
{
// データを読み取る, len: データ長, buf: データバッファ
CAN.readMsgBuf(&len, buf);
// データを出力
for(int i = 0; i<len; i++)
{
Serial.print(buf[i]);Serial.print("\t");
}
Serial.println();
}
}
}
Arduino IDE の シリアルモニタ を開くには、ツール -> シリアルモニタ をクリックします。または ctrl+shift+m キーを同時に押します。ボーレートを 115200 に設定してください。結果は以下のようになります:

または、python-can を使用してデータを送信することもできます:
Python コードは以下の通りです:
import time
import can
bustype = 'socketcan_native'
channel = 'can0'
def producer(id):
""":param id: データIDを含むメッセージをバスに送信します。"""
bus = can.interface.Bus(channel=channel, bustype=bustype)
for i in range(10):
msg = can.Message(arbitration_id=0xc0ffee, data=[id, i, 0, 1, 3, 1, 4, 1], extended_id=False)
bus.send(msg)
# Issue #3: 書き込みスレッドが生き続けるようにする必要があります。
time.sleep(1)
producer(10)
CAN-HAT のアンインストール
この CAN-HAT をアンインストールしたい場合は、以下のコードを実行してください:
pi@raspberrypi:~/seeed-linux-dtoverlays/modules/CAN-HAT $ sudo ./uninstall.sh
...
------------------------------------------------------
Raspberry Pi を再起動してすべての設定を適用してください
ありがとうございました!
------------------------------------------------------
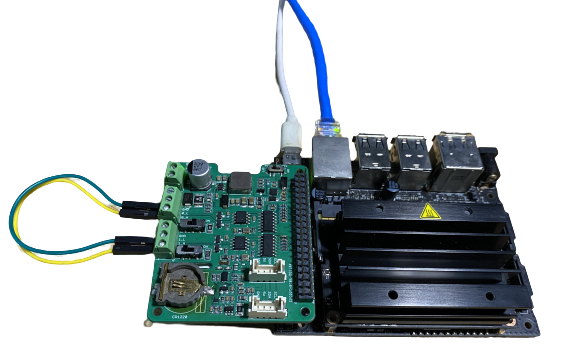
Jetson NanoでCAN-BUSシールドを使用する
現在、CAN-BUSシールドはJetson Nanoプラットフォームもサポートしていますが、ハードウェアのバージョンによっていくつかの制限があります。Jetson Nanoプラットフォームを使用している場合は、バージョン宣言を参照してください!
- リポジトリをクローンする:
git clone https://github.com/Seeed-Studio/seeed-linux-dtoverlays
- dtboとドライバーをビルドする:
cd seeed-linux-dtoverlays
export CUSTOM_MOD_LIST="CAN-HAT"; make all_jetsonnano
- ドライバーをインストールする:
sudo -E make install_jetsonnano
- dtboをインストールする:
sudo cp overlays/jetsonnano/2xMCP2518FD-spi0.dtbo /boot
sudo /opt/nvidia/jetson-io/config-by-hardware.py -n "Seeed 2xMCP2518FD"
sudo reboot
これで、dmesg | grep spiやifconfig -aを実行してCAN-BUSが正しく初期化されたか確認できます。ハードウェアによっては、can0またはcan0とcan1の両方が表示されるはずです。
ここで使用されているハードウェアは、最新の2チャンネルCAN FDマスターハット(RPi用)であり、Jetson Nanoプラットフォームで2チャンネルをサポートしています。古いバージョンを使用している場合は、can0の単一チャンネルのみが利用可能です。
qqq@jetson-qqq:~$ dmesg | grep spi
[ 10.867712] mcp25xxfd spi0.0 can0: MCP2518FD rev0.0 (-RX_INT -MAB_NO_WARN +CRC_REG +CRC_RX +CRC_TX +ECC -HD m:20.00MHz r:18.50MHz e:0.00MHz) successfully initialized.
[ 10.879487] mcp25xxfd spi0.1 can1: MCP2518FD rev0.0 (-RX_INT -MAB_NO_WARN +CRC_REG +CRC_RX +CRC_TX +ECC -HD m:20.00MHz r:18.50MHz e:0.00MHz) successfully initialized.
qqq@jetson-qqq:~$ ifconfig -a
can0: flags=128<NOARP> mtu 16
unspec 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00 txqueuelen 10 (UNSPEC)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
device interrupt 112
can1: flags=128<NOARP> mtu 16
unspec 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00 txqueuelen 10 (UNSPEC)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
device interrupt 114
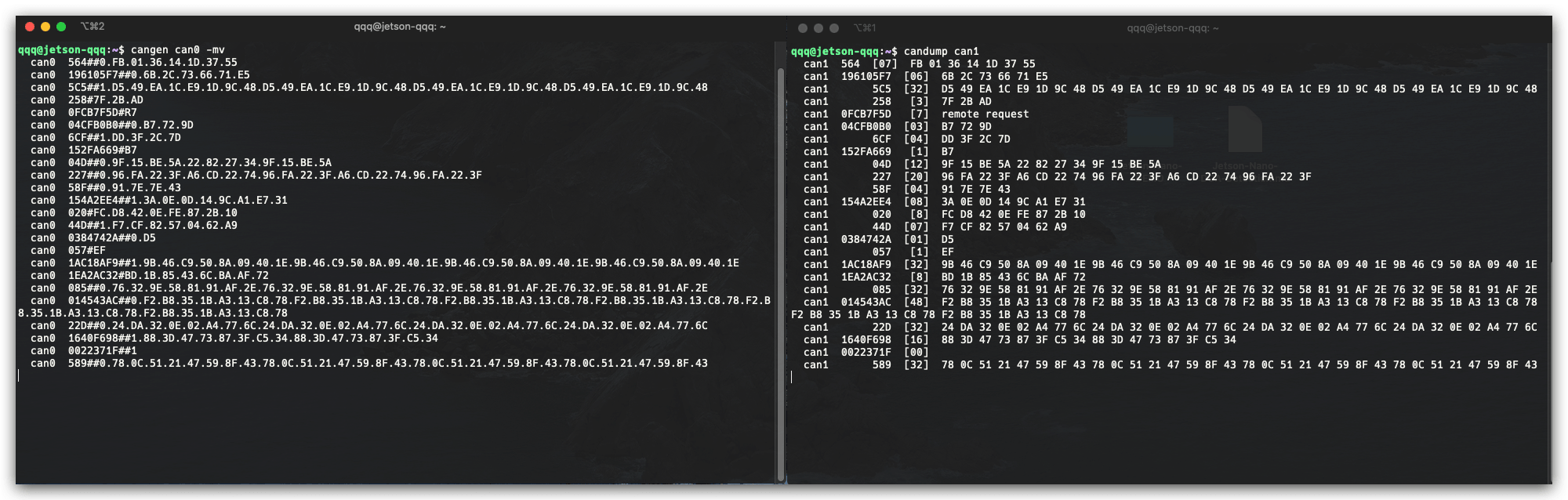
テスト
注意: ここでは2チャンネルCAN FDマスターハット(RPi用)をハードウェアとして使用しています。
以下のようにチャンネルを接続してテストすることができます:
0_L ←→ 1_L
0_H ←→ 1_H
2つのターミナルウィンドウを開き、以下のコマンドを入力してCAN FDプロトコルをテストします。
#データ送信
cangen can0 -mv
#データ受信
candump can1
内蔵RTCの使用
最新の2チャンネルCAN FDマスターハット(RPi用)にはオンボードRTCも搭載されています。以下の手順に従ってRaspberry PiにRTCドライバーをインストールしてください:
- Raspberry Piを更新して再起動:
sudo apt update
sudo apt upgrade
sudo reboot
- 依存関係をインストールする:
sudo apt install i2c-tools build-essential raspberrypi-kernel-headers
- ドライバーをダウンロードする:
curl -O -L https://github.com/dresden-elektronik/raspbee2-rtc/archive/master.zip
unzip master.zip
- RTCカーネルモジュールをコンパイルする:
cd raspbee2-rtc-master
make
- RTCカーネルモジュールをインストールする:
sudo make install
sudo reboot
- RTCモジュールにシステム時間を設定する:
sudo hwclock --systohc
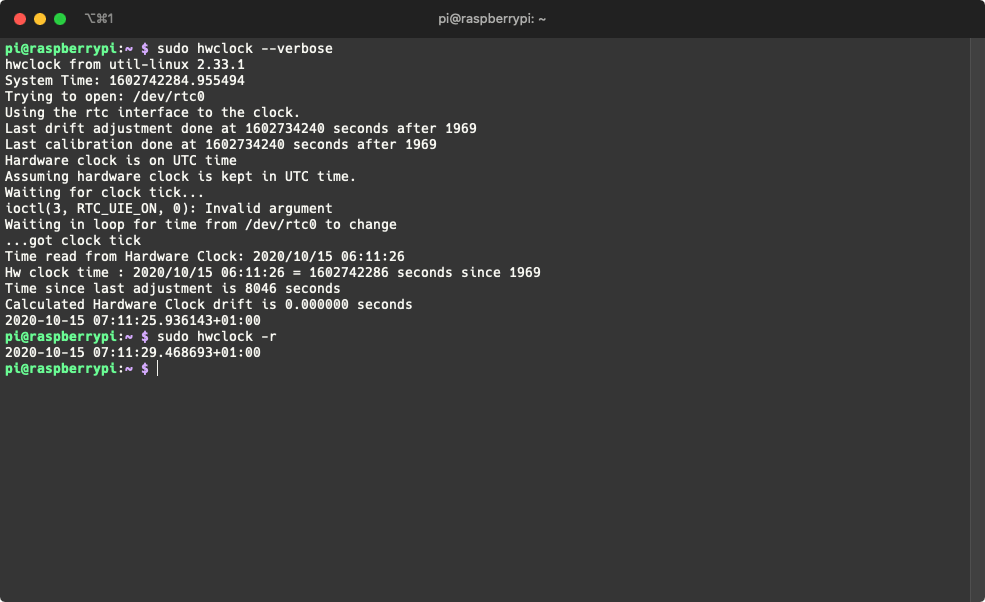
- RTCが動作しているかテストする:
sudo hwclock --verbose
以下のコマンドでRTC時間を読み取ることができます:
sudo hwclock -r
Wio Terminal を使用する

CAN-BUS Pi Hat を SBC と一緒に使用するだけでなく、Wio Terminal(Arduino互換ボード)でも使用できます!これにより、MCU上でCAN関連のプロジェクトを開発することが可能です。
以下のWikiを確認して、Wio Terminalについてさらに詳しく知ることができます:
必要なハードウェア
テスト目的で、他のCAN-BUSデバイスコンポーネントを準備することもできます。この例では以下を使用しています:
- CAN-BUS Shield V2(MCP2515およびMCP2551を採用) + Arduinoボード
Seeed_Arduino_CAN Arduinoライブラリのインストール
Seeed SAMDボードライブラリをインストールし、最新バージョンに更新していることを確認してください!
-
Seeed_Arduino_CAN リポジトリにアクセスし、リポジトリ全体をローカルドライブにダウンロードします。
-
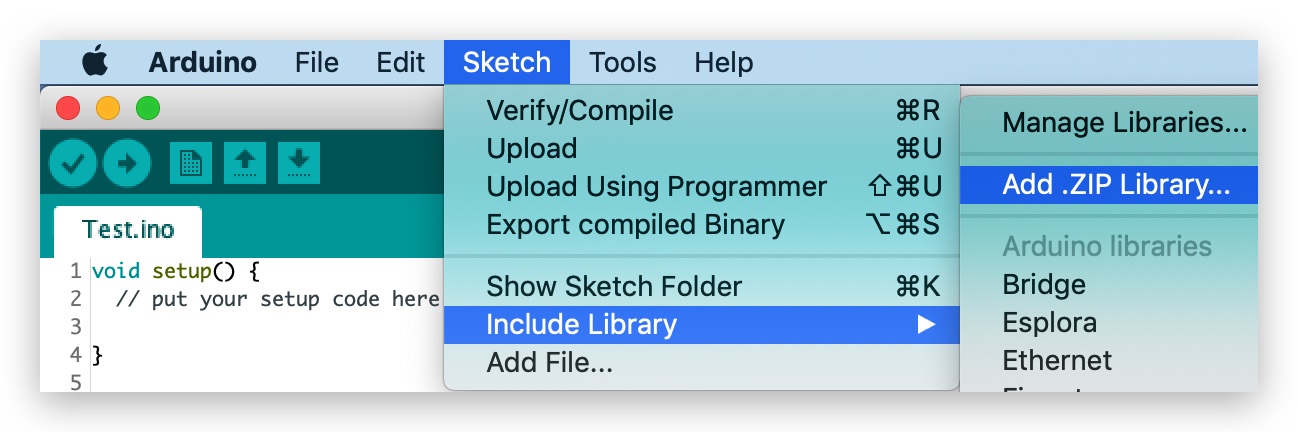
次に、Seeed_Arduino_CANライブラリをArduino IDEにインストールします。Arduino IDEを開き、
スケッチ->ライブラリを含める->ZIP形式のライブラリを追加をクリックし、先ほどダウンロードしたSeeed_Arduino_CANファイルを選択します。
送信例コード
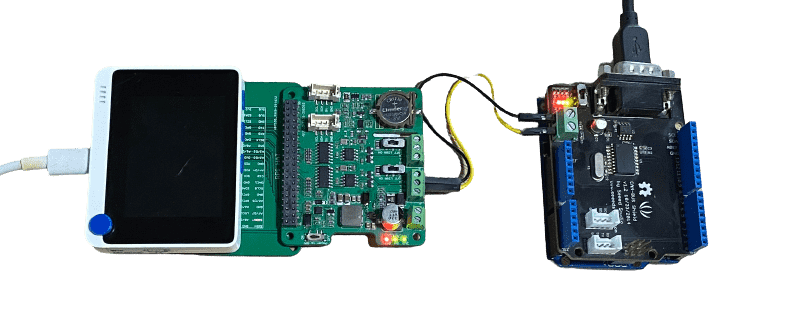
これは、2チャンネル CAN-BUS(FD) シールド for Raspberry Pi (MCP2518FD) を Wio Terminal と一緒に使用して、CAN-BUSデータを別のCAN-BUSデバイスに送信する例です(この場合、CAN-BUS Shield V2(MCP2515およびMCP2551を採用)+ Arduino Uno)。
ハードウェア接続
-
2チャンネル CAN-BUS(FD) シールド for Raspberry Pi (MCP2518FD) の
Channel 0 Lを CAN-BUS Shield V2 のCANLに接続します。 -
2チャンネル CAN-BUS(FD) シールド for Raspberry Pi (MCP2518FD) の
Channel 0 Hを CAN-BUS Shield V2 のCANHに接続します。 -
40ピン Raspberry Pi Hat アダプタボード を使用して、2チャンネル CAN-BUS(FD) シールド for Raspberry Pi (MCP2518FD) を Wio Terminal に接続します。
- Arduino Uno + CAN-BUS Shield V2 用コード
#include <SPI.h>
#include "mcp2515_can.h"
/*SAMD core*/
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SERIAL SerialUSB
#else
#define SERIAL Serial
#endif
const int SPI_CS_PIN = 9;
mcp2515_can CAN(SPI_CS_PIN);
unsigned char len = 0;
unsigned char buf[8];
void setup() {
SERIAL.begin(115200);
while (!SERIAL) {
; // ネイティブUSBポートのみ必要なシリアルポート接続を待機
}
while (CAN_OK != CAN.begin(CAN_500KBPS)) { // CANバス初期化:ボーレート = 500k
SERIAL.println("CAN BUS Shield 初期化失敗");
SERIAL.println("CAN BUS Shield を再初期化します");
delay(100);
}
SERIAL.println("CAN BUS Shield 初期化成功!");
}
void loop() {
// 保留中のすべてのメッセージを反復処理
// バスが飽和しているかMCUがビジー状態の場合、
// 両方のRXバッファが使用中であり、単一メッセージの読み取りではIRQ条件がクリアされません。
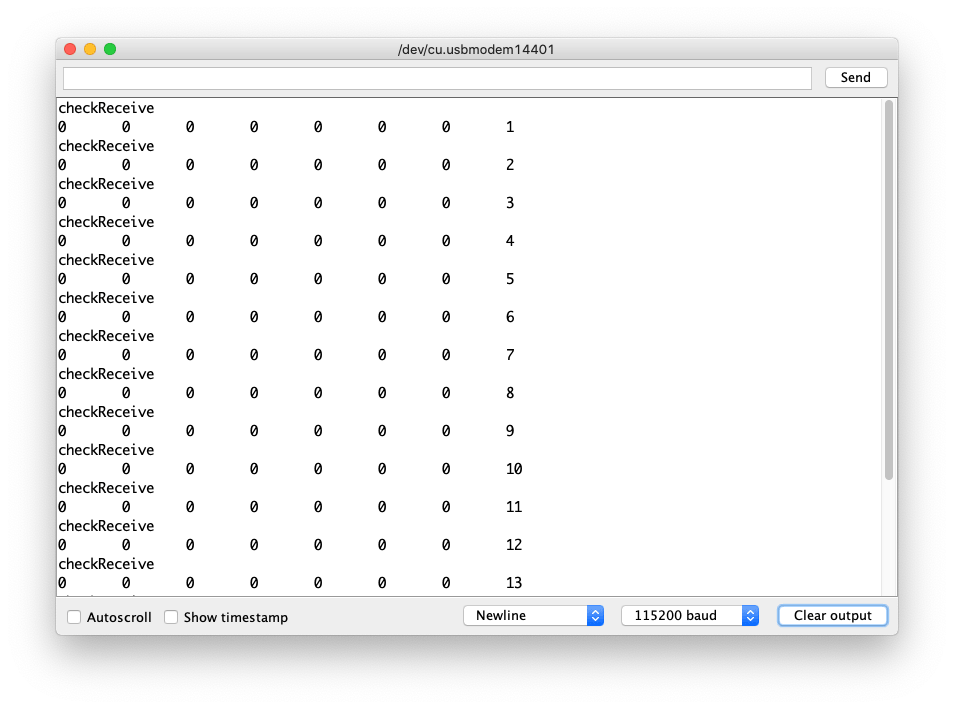
while (CAN_MSGAVAIL == CAN.checkReceive()) {
// データを読み取る、len: データ長、buf: データバッファ
SERIAL.println("checkReceive");
CAN.readMsgBuf(&len, buf);
// データを出力
for (int i = 0; i < len; i++) {
SERIAL.print(buf[i]); SERIAL.print("\t");
}
SERIAL.println();
}
}
- Wio Terminal + 2チャンネル CAN-BUS(FD) シールド for Raspberry Pi (MCP2518FD) 用コード
#include <SPI.h>
#include "mcp2518fd_can.h"
/*SAMD core*/
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SERIAL SerialUSB
#else
#define SERIAL Serial
#endif
// ハードウェアに応じてSPI CSピンを設定
// Wio Terminal w/ MCP2518FD RPi Hat:
// Channel 0 SPI_CS ピン: BCM 8
// Channel 1 SPI_CS ピン: BCM 7
// 割り込みピン: BCM25
// *****************************************
// Arduino MCP2515 Hat:
// SPI_CS ピン: D9
const int SPI_CS_PIN = BCM8;
mcp2518fd CAN(SPI_CS_PIN); // CSピンを設定
void setup() {
SERIAL.begin(115200);
while(!Serial){};
while (0 != CAN.begin((byte)CAN_500K_1M)) { // CANバス初期化:ボーレート = 500k
SERIAL.println("CAN BUS Shield 初期化失敗");
SERIAL.println("CAN BUS Shield を再初期化します");
delay(100);
}
SERIAL.println("CAN BUS Shield 初期化成功!");
}
unsigned char stmp[8] = {0, 0, 0, 0, 0, 0, 0, 0};
void loop() {
// データ送信: id = 0x00、標準フレーム、データ長 = 8、stmp: データバッファ
stmp[7] = stmp[7] + 1;
if (stmp[7] == 100) {
stmp[7] = 0;
stmp[6] = stmp[6] + 1;
if (stmp[6] == 100) {
stmp[6] = 0;
stmp[5] = stmp[6] + 1;
}
}
CAN.sendMsgBuf(0x00, 0, 8, stmp);
delay(100); // 100msごとにデータを送信
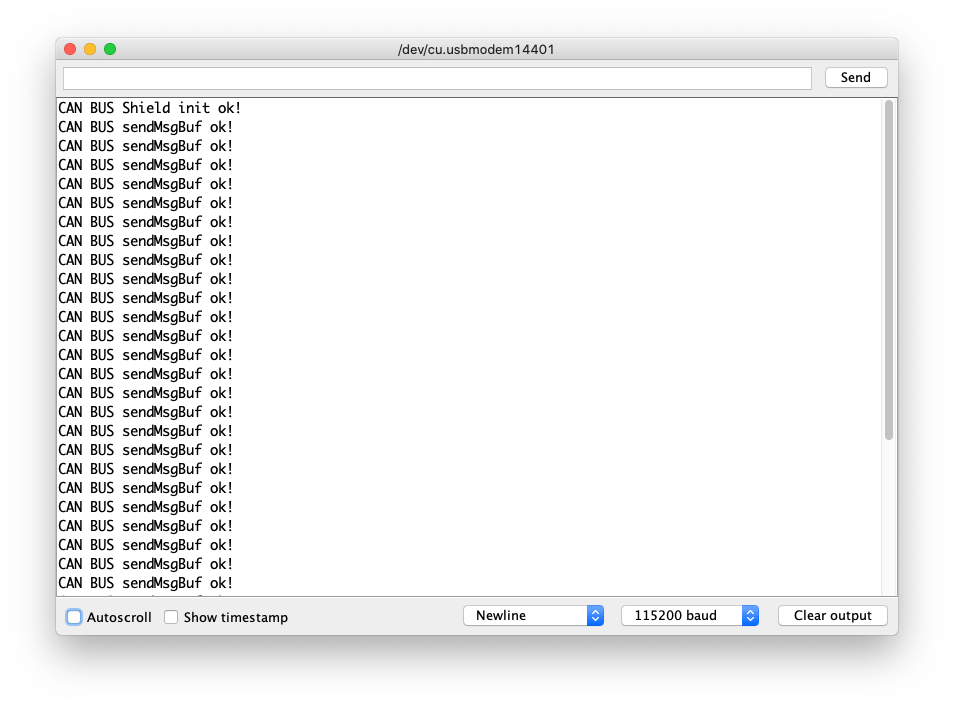
SERIAL.println("CAN BUS sendMsgBuf 成功!");
}
受信例コード
これは、2チャンネル CAN-BUS(FD) シールド for Raspberry Pi (MCP2518FD) を Wio Terminal と一緒に使用して、別のCAN-BUSデバイスからCAN-BUSデータを受信する例です(この場合、CAN-BUS Shield V2(MCP2515およびMCP2551を採用)+ Arduino Uno)。
ハードウェア接続
送信例と同じ接続。
- Arduino Uno + CAN-BUS Shield V2 用コード
#include <SPI.h>
#include "mcp2515_can.h"
/*SAMD core*/
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SERIAL SerialUSB
#else
#define SERIAL Serial
#endif
const int SPI_CS_PIN = 9;
mcp2515_can CAN(SPI_CS_PIN); // CSピンを設定
void setup() {
SERIAL.begin(115200);
while(!Serial){};
while (CAN_OK != CAN.begin(CAN_500KBPS)) { // CANバス初期化:ボーレート = 500k
SERIAL.println("CAN BUS Shield 初期化失敗");
SERIAL.println("CAN BUS Shield を再初期化します");
delay(100);
}
SERIAL.println("CAN BUS Shield 初期化成功!");
}
unsigned char stmp[8] = {0, 0, 0, 0, 0, 0, 0, 0};
void loop() {
// データ送信: id = 0x00、標準フレーム、データ長 = 8、stmp: データバッファ
stmp[7] = stmp[7] + 1;
if (stmp[7] == 100) {
stmp[7] = 0;
stmp[6] = stmp[6] + 1;
if (stmp[6] == 100) {
stmp[6] = 0;
stmp[5] = stmp[6] + 1;
}
}
CAN.sendMsgBuf(0x00, 0, 8, stmp);
delay(100); // 100msごとにデータを送信
SERIAL.println("CAN BUS sendMsgBuf 成功!");
}
- Wio Terminal + 2-Channel CAN-BUS(FD) Shield for Raspberry Pi (MCP2518FD) 用コード
#include <SPI.h>
#include "mcp2518fd_can.h"
/*SAMDコア*/
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SERIAL SerialUSB
#else
#define SERIAL Serial
#endif
// ハードウェアに応じてSPI CSピンを設定
// Wio Terminal w/ MCP2518FD RPi Hatの場合:
// チャンネル0 SPI_CSピン: BCM 8
// チャンネル1 SPI_CSピン: BCM 7
// 割り込みピン: BCM25
// *****************************************
// Arduino MCP2515 Hatの場合:
// SPI_CSピン: D9
const int SPI_CS_PIN = BCM8;
mcp2518fd CAN(SPI_CS_PIN);
unsigned char len = 0;
unsigned char buf[8];
void setup() {
SERIAL.begin(115200);
while (!SERIAL) {
; // ネイティブUSBポートのみで必要なシリアルポート接続を待機
}
while (0 != CAN.begin((byte)CAN_500K_1M)) { // CANバス初期化:ボーレート = 500k
SERIAL.println("CAN BUS Shield 初期化失敗");
SERIAL.println("CAN BUS Shield を再初期化します");
delay(100);
}
SERIAL.println("CAN BUS Shield 初期化成功!");
}
void loop() {
// 保留中のすべてのメッセージを反復処理
// バスが飽和している場合やMCUが忙しい場合、
// 両方のRXバッファが使用中であり、単一のメッセージを読み取ってもIRQ条件はクリアされません。
while (CAN_MSGAVAIL == CAN.checkReceive()) {
// データを読み取る、len: データ長、buf: データバッファ
SERIAL.println("checkReceive");
CAN.readMsgBuf(&len, buf);
// データを出力
for (int i = 0; i < len; i++) {
SERIAL.print(buf[i]); SERIAL.print("\t");
}
SERIAL.println();
}
}
割り込みを使用した受信例コード
これは、2-Channel CAN-BUS(FD) Shield for Raspberry Pi (MCP2518FD) を使用して Wio Terminal が他のCAN-BUSデバイス(この場合、MCP2515とMCP2551を採用したCAN-BUS Shield V2 + Arduino Uno)からCAN-BUSデータを受信する例です。より信頼性を高めるために、割り込みを使用して受信データフローをトリガーしています。
ハードウェア接続
- Arduino Uno + CAN-BUS Shield V2 用コード
#include <SPI.h>
#include "mcp2515_can.h"
/*SAMDコア*/
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SERIAL SerialUSB
#else
#define SERIAL Serial
#endif
const int SPI_CS_PIN = 9;
mcp2515_can CAN(SPI_CS_PIN); // CSピンを設定
void setup() {
SERIAL.begin(115200);
while(!Serial){};
while (CAN_OK != CAN.begin(CAN_500KBPS)) { // CANバス初期化:ボーレート = 500k
SERIAL.println("CAN BUS Shield 初期化失敗");
SERIAL.println("CAN BUS Shield を再初期化します");
delay(100);
}
SERIAL.println("CAN BUS Shield 初期化成功!");
}
unsigned char stmp[8] = {0, 0, 0, 0, 0, 0, 0, 0};
void loop() {
// データ送信: id = 0x00、標準フレーム、データ長 = 8、stmp: データバッファ
stmp[7] = stmp[7] + 1;
if (stmp[7] == 100) {
stmp[7] = 0;
stmp[6] = stmp[6] + 1;
if (stmp[6] == 100) {
stmp[6] = 0;
stmp[5] = stmp[6] + 1;
}
}
CAN.sendMsgBuf(0x00, 0, 8, stmp);
delay(100); // 100msごとにデータ送信
SERIAL.println("CAN BUS sendMsgBuf 成功!");
}
Wio Terminal + 2-Channel CAN-BUS(FD) Shield for Raspberry Pi (MCP2518FD) 用コード
#include <SPI.h>
#include "mcp2518fd_can.h"
/*SAMDコア*/
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SERIAL SerialUSB
#else
#define SERIAL Serial
#endif
// ハードウェアに応じてSPI CSピンを設定
// Wio Terminal w/ MCP2518FD RPi Hatの場合:
// チャンネル0 SPI_CSピン: BCM 8
// チャンネル1 SPI_CSピン: BCM 7
// 割り込みピン: BCM25
// *****************************************
// Arduino MCP2515 Hatの場合:
// SPI_CSピン: D9
const int SPI_CS_PIN = BCM8;
const int CAN_INT_PIN = BCM25;
mcp2518fd CAN(SPI_CS_PIN);
unsigned char flagRecv = 0;
unsigned char len = 0;
unsigned char buf[8];
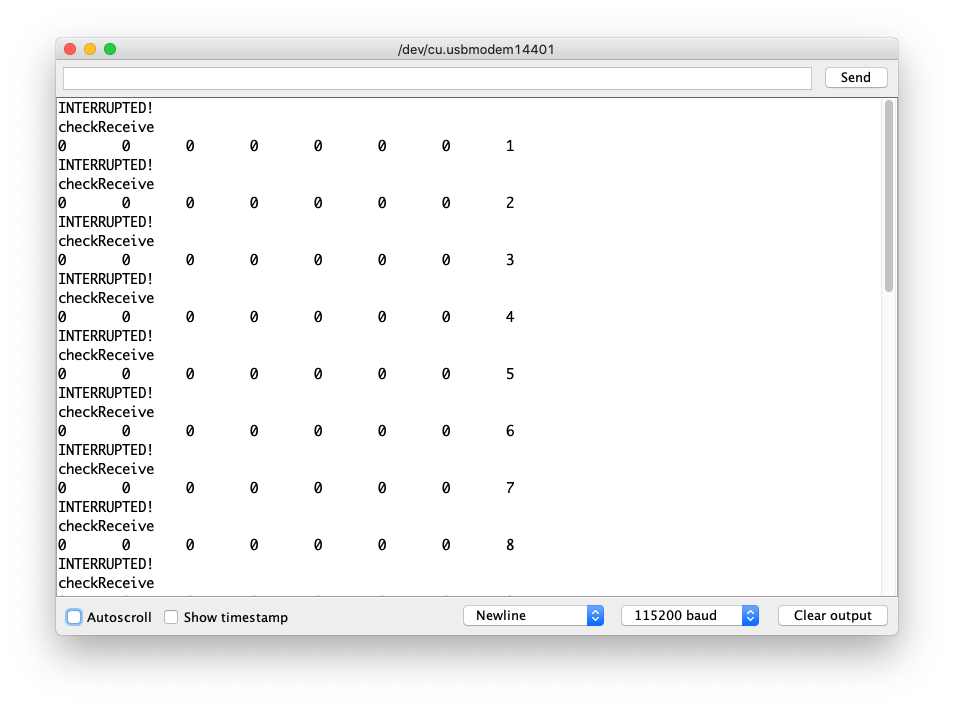
void MCP2515_ISR() {
Serial.println("割り込み発生!");
flagRecv = 1;
}
void setup() {
SERIAL.begin(115200);
while (!SERIAL) {
; // ネイティブUSBポートのみで必要なシリアルポート接続を待機
}
pinMode(CAN_INT_PIN, INPUT);
attachInterrupt(digitalPinToInterrupt(CAN_INT_PIN), MCP2515_ISR, FALLING); // 割り込み開始
while (0 != CAN.begin((byte)CAN_500K_1M)) { // CANバス初期化:ボーレート = 500k
SERIAL.println("CAN BUS Shield 初期化失敗");
SERIAL.println("CAN BUS Shield を再初期化します");
delay(100);
}
SERIAL.println("CAN BUS Shield 初期化成功!");
}
void loop() {
if (flagRecv) // 割り込みトリガー
{
flagRecv = 0;
// 保留中のすべてのメッセージを反復処理
// バスが飽和している場合やMCUが忙しい場合、
// 両方のRXバッファが使用中であり、単一のメッセージを読み取ってもIRQ条件はクリアされません。
while (CAN_MSGAVAIL == CAN.checkReceive()) {
// データを読み取る、len: データ長、buf: データバッファ
SERIAL.println("checkReceive");
CAN.readMsgBuf(&len, buf);
// データを出力
for (int i = 0; i < len; i++) {
SERIAL.print(buf[i]); SERIAL.print("\t");
}
SERIAL.println();
}
}
}
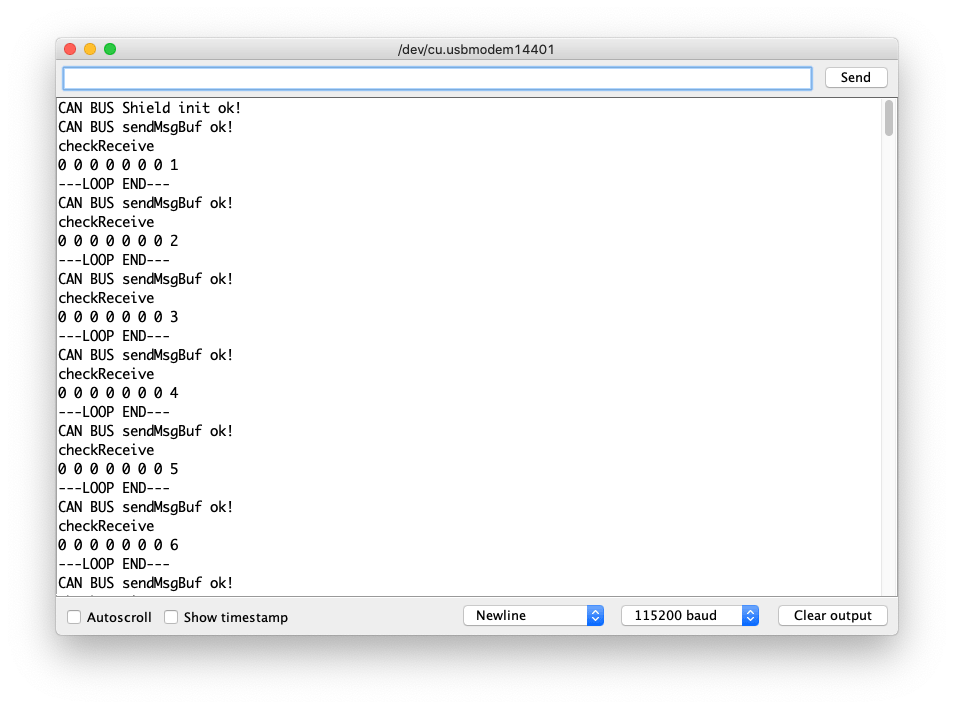
自己送信・受信例コード
これは、2-Channel CAN-BUS(FD) Shield for Raspberry Pi (MCP2518FD) を使用して自身でCAN-BUSデータを送信および受信する例です。
ハードウェア接続
-
2-Channel CAN-BUS(FD) Shield for Raspberry Pi (MCP2518FD) の
Channel 0 Lを 2-Channel CAN-BUS(FD) Shield for Raspberry Pi (MCP2518FD) のChannel 1 Lに接続 -
2-Channel CAN-BUS(FD) Shield for Raspberry Pi (MCP2518FD) の
Channel 0 Hを 2-Channel CAN-BUS(FD) Shield for Raspberry Pi (MCP2518FD) のChannel 1 Hに接続

#include <SPI.h>
#include "mcp2518fd_can.h"
/*SAMDコア*/
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SERIAL SerialUSB
#else
#define SERIAL Serial
#endif
// ハードウェアに応じてSPI CSピンを設定
// Wio Terminal w/ MCP2518FD RPi Hatの場合:
// チャンネル0 SPI_CSピン: BCM 8
// チャンネル1 SPI_CSピン: BCM 7
// 割り込みピン: BCM25
// *****************************************
// Arduino MCP2515 Hatの場合:
// SPI_CSピン: D9
const int SPI_CS_PIN_SEND = BCM8;
const int SPI_CS_PIN_RECEIVE = BCM7;
mcp2518fd CAN_SEND(SPI_CS_PIN_SEND);
mcp2518fd CAN_RECEIVE(SPI_CS_PIN_RECEIVE);
unsigned char len = 0;
unsigned char buf[8];
void setup() {
SERIAL.begin(115200);
while(!Serial); // シリアル待機
if (CAN_SEND.begin((byte)CAN_500K_1M) != 0 || CAN_RECEIVE.begin((byte)CAN_500K_1M) != 0) {
Serial.println("CAN-BUS 初期化エラー!");
while(1);
}
SERIAL.println("CAN BUS Shield 初期化成功!");
}
unsigned char stmp[8] = {0, 0, 0, 0, 0, 0, 0, 0};
void loop() {
// データ送信: id = 0x00、標準フレーム、データ長 = 8、stmp: データバッファ
stmp[7] = stmp[7] + 1;
if (stmp[7] == 100) {
stmp[7] = 0;
stmp[6] = stmp[6] + 1;
if (stmp[6] == 100) {
stmp[6] = 0;
stmp[5] = stmp[6] + 1;
}
}
CAN_SEND.sendMsgBuf(0x00, 0, 8, stmp);
delay(100); // 100msごとにデータ送信
SERIAL.println("CAN BUS sendMsgBuf 成功!");
// ---------------------
if (CAN_MSGAVAIL == CAN_RECEIVE.checkReceive()) {
// データを読み取る、len: データ長、buf: データバッファ
SERIAL.println("checkReceive");
CAN_RECEIVE.readMsgBuf(&len, buf);
// データを出力
for (int i = 0; i < len; i++) {
SERIAL.print(buf[i]); SERIAL.print(" ");
}
SERIAL.println();
}
SERIAL.println("---LOOP END---");
}
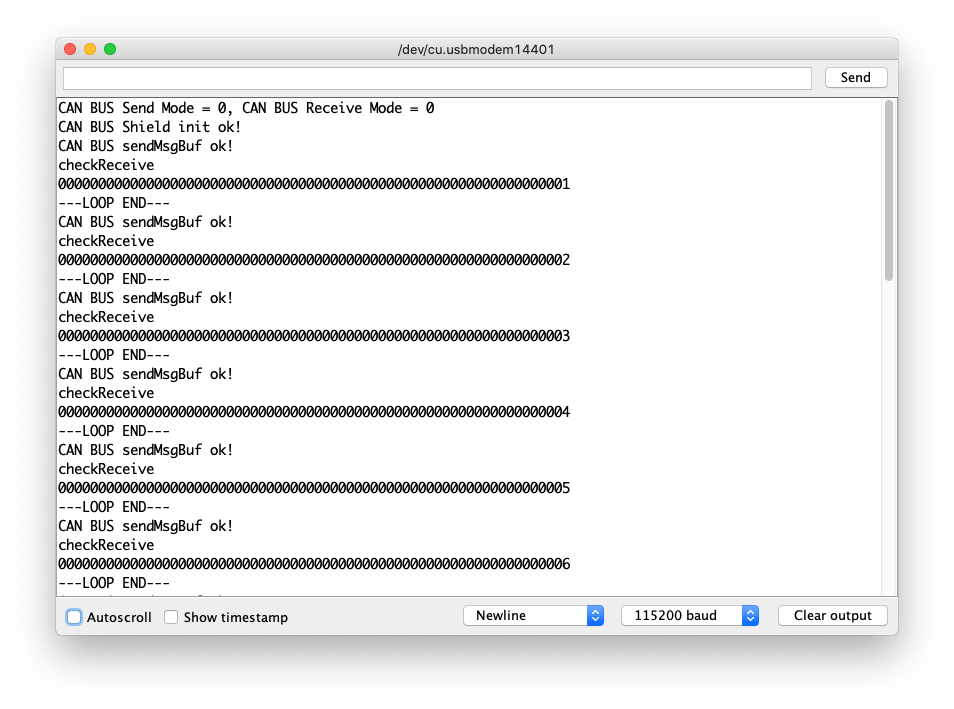
FD送信例コード
これは、Raspberry Pi用2チャンネルCAN-BUS(FD)シールド(MCP2518FD)を使用して、FDプロトコルを使用して独自にCAN-BUSデータ(最大64ビット)を送受信する例です。
ハードウェア接続
自己送受信例と同じ接続です。
#include <SPI.h>
#include "mcp2518fd_can.h"
/*SAMDコア*/
#ifdef ARDUINO_SAMD_VARIANT_COMPLIANCE
#define SERIAL SerialUSB
#else
#define SERIAL Serial
#endif
// ハードウェアに応じてSPI CSピンを設定
// Wio Terminal w/ MCP2518FD RPi Hatの場合:
// チャンネル0 SPI_CSピン: BCM 8
// チャンネル1 SPI_CSピン: BCM 7
// 割り込みピン: BCM25
// *****************************************
// Arduino MCP2515 Hatの場合:
// SPI_CSピン: D9
const int SPI_CS_PIN_SEND = BCM8;
const int SPI_CS_PIN_RECEIVE = BCM7;
mcp2518fd CAN_SEND(SPI_CS_PIN_SEND);
mcp2518fd CAN_RECEIVE(SPI_CS_PIN_RECEIVE);
void setup() {
SERIAL.begin(115200);
while(!Serial); // Serialが準備完了するまで待機
CAN_SEND.setMode(0);
CAN_RECEIVE.setMode(0);
if (CAN_SEND.begin((byte)CAN_500K_1M) != 0 || CAN_RECEIVE.begin((byte)CAN_500K_1M) != 0) {
Serial.println("CAN-BUS初期化エラー!");
while(1);
}
byte send_mode = CAN_SEND.getMode();
byte receive_mode = CAN_RECEIVE.getMode();
SERIAL.printf("CAN BUS送信モード = %d, CAN BUS受信モード = %d\n\r",send_mode, receive_mode);
SERIAL.println("CAN BUSシールド初期化完了!");
}
unsigned char stmp[64] = {0};
unsigned char len = 0;
unsigned char buf[64];
void loop() {
stmp[63] = stmp[63] + 1;
if (stmp[63] == 100) {
stmp[63] = 0;
stmp[62] = stmp[62] + 1;
if (stmp[62] == 100) {
stmp[62] = 0;
stmp[61] = stmp[62] + 1;
}
}
CAN_SEND.sendMsgBuf(0x00, 0, 15, stmp);
delay(100); // 100msごとにデータを送信
SERIAL.println("CAN BUS sendMsgBuf完了!");
// ---------------------
if (CAN_MSGAVAIL == CAN_RECEIVE.checkReceive()) {
// データを読み取り、len: データ長、buf: データバッファ
SERIAL.println("checkReceive");
CAN_RECEIVE.readMsgBuf(&len, buf);
// データを出力
for (int i = 0; i < len; i++) {
SERIAL.print(buf[i]); SERIAL.print(" ");
}
SERIAL.println();
}
SERIAL.println("---ループ終了---");
}
回路図オンラインビューア
リソース
- [PDF] Raspberry Pi用2チャンネルCAN-BUS(FD)シールド(MCP2518FD)回路図
- [ZIP] Raspberry Pi用2チャンネルCAN-BUS(FD)シールド回路図ファイル
- [ZIP] Raspberry Pi用2チャンネルCAN FDマスターハット回路図ファイル
- [PDF] MCP2517データシート
- [PDF] MCP2557データシート
技術サポートと製品ディスカッション
弊社製品をお選びいただきありがとうございます!製品をご利用いただく際に、できる限りスムーズな体験を提供するため、さまざまなサポートを提供しております。お客様の好みやニーズに応じた複数のコミュニケーションチャネルをご用意しています。