SeeedStudio BeagleBone® Green
Seeed Studio BeagleBone® Greenは、開発者やホビイスト向けの低コストでオープンソース、コミュニティサポートの開発プラットフォームです。これはBeagleBoard.orgとSeeed Studioの共同プロジェクトです。BeagleBone® Blackのクラシックなオープンソースハードウェア設計を基にしており、差別化されたバージョンとして開発されました。Seeed Studio BeagleBone® Greenには2つのGroveコネクタが含まれており、Groveセンサーの大家族に簡単に接続できます。オンボードHDMIは削除され、これらのGroveコネクタのスペースが確保されています。
Linuxを10秒以内に起動し、わずか1本のUSBケーブルで5分以内に開発を開始できます。
![]()
特徴
- BeagleBone® Blackと完全互換
- プロセッサ: AM335x 1GHz ARMR Cortex-A8
- 512MB DDR3 RAM
- 4GB 8ビット eMMCオンボードフラッシュストレージ
- 3Dグラフィックスアクセラレータ
- NEON浮動小数点アクセラレータ
- 2x PRU 32ビットマイクロコントローラ
- 接続性
- 電源および通信用USBクライアント
- USBホスト
- イーサネット
- 2x 46ピンヘッダー
- 2x Groveコネクタ(I2CおよびUART)
- ソフトウェア互換性
- Debian
- Android
- Ubuntu
- Cloud9 IDE on Node.js w/ BoneScriptライブラリ
- その他多数
仕様
| 項目 | 値 |
|---|---|
| プロセッサ | AM335x 1GHz ARMR Cortex-A8 |
| RAM | 512MB DDR3 |
| オンボードフラッシュストレージ | 4GB eMMC |
| CPUサポート | NEON浮動小数点 & 3Dグラフィックスアクセラレータ |
| Micro USBサポート | 電源供給 & 通信 |
| USB | ホスト 1 |
| Groveコネクタ | 2 (1つはI2C、もう1つはUART) |
| GPIO | 2 x 46ピンヘッダー |
| イーサネット | 1 |
| 動作温度 | 0 ~ 75 |
応用アイデア
- モノのインターネット(IoT)
- スマートハウス
- 産業用途
- 自動化 & プロセス制御
- ヒューマンマシンインターフェース
- センサーハブ
- ロボット
以下は参考になる面白いプロジェクトです。
| ホームセンター | レトロランプ | モーター駆動 |
|---|---|---|
 |  |  |
| 今すぐ作る! | 今すぐ作る! | 今すぐ作る! |
| Seeed Studio BeagleBone® Green アクリルケース | GPIO制御 | スマートライト |
|---|---|---|
 |  |  |
| 今すぐ作る! | 今すぐ作る! | 今すぐ作る! |
ハードウェア概要
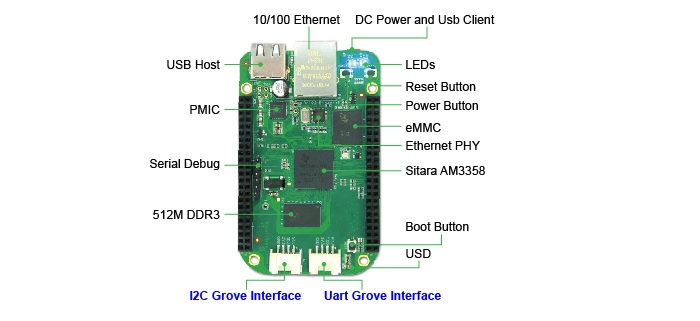
- USBホスト - USBホスト
- DC電源およびUSBクライアント - ボードに電源を供給し、クライアントとして動作
- LED
- D2 - 起動時にハートビートパターンで点滅するように設定
- D3 - 起動時にmicroSDカードアクセス時に点灯するように設定
- D4 - 起動時にCPUアクティビティ時に点灯するように設定
- D5 - 起動時にeMMCアクセス時に点灯するように設定
- ブートボタン
- SDカードが挿入されている場合、システムはSDカードから起動します。eMMCから起動したい場合は、このボタンを押してから電源を入れてください。
- 起動後は通常のボタンとして使用可能で、GPIO_72に接続されています。
- I2C Groveインターフェース - I2C2に接続
- UART Groveインターフェース - UART2に接続
- シリアルデバッグ - UART0に接続、PIN1~PIN6: GND, NC, NC, RX, TX, NC(PIN1はUSBに近い側)
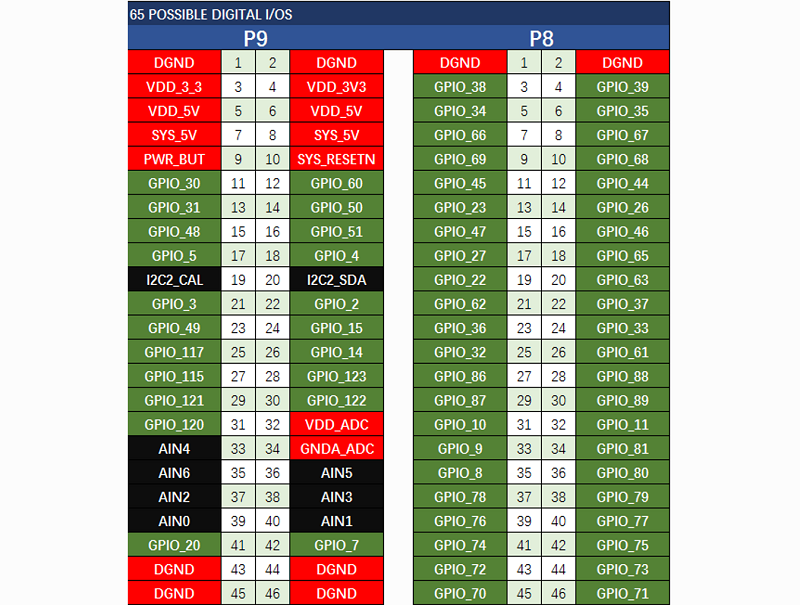
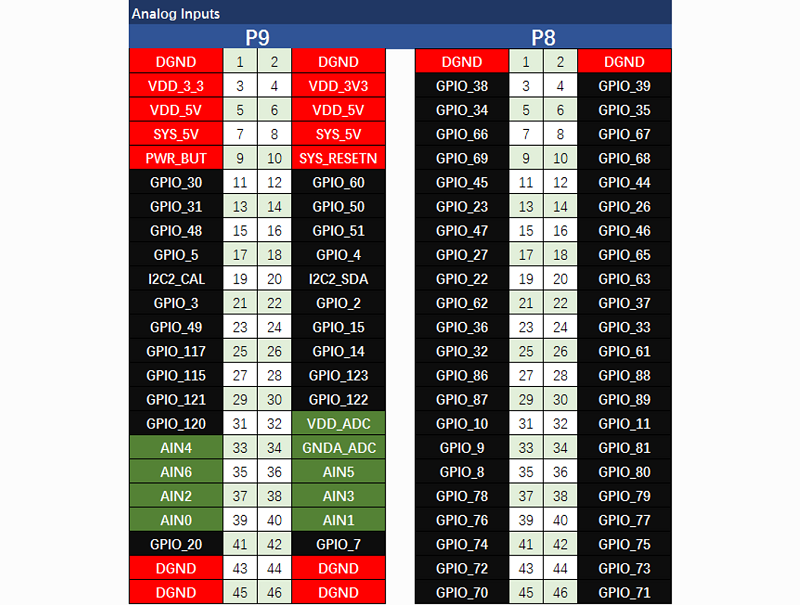
ピンマップ
各デジタルI/Oピンには選択可能な8つの異なるモードがあり、GPIOを含みます。
65個のデジタルI/Oが利用可能
GPIOモードでは、各デジタルI/Oは割り込みを生成できます。
PWMとタイマー
最大8つのデジタルI/Oピンをパルス幅変調(PWM)として設定可能で、モーター制御や擬似アナログ電圧レベルの生成に使用できます。これにより、追加のCPUサイクルを消費せずに信号を生成できます。
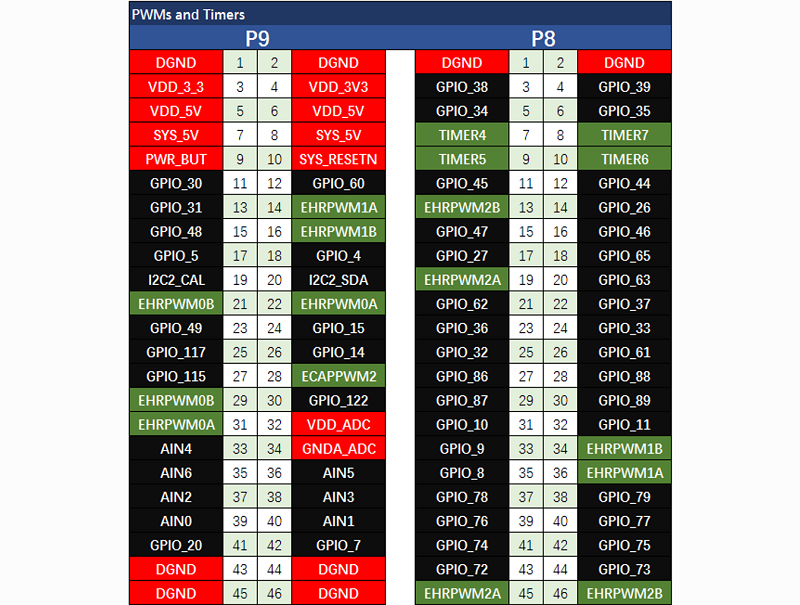
アナログ入力
アナログ入力ピンに1.8Vを超える電圧を入力しないようにしてください。これは8チャンネルを持つ単一の12ビットアナログ-デジタルコンバータで、そのうち7チャンネルがヘッダーで利用可能です。
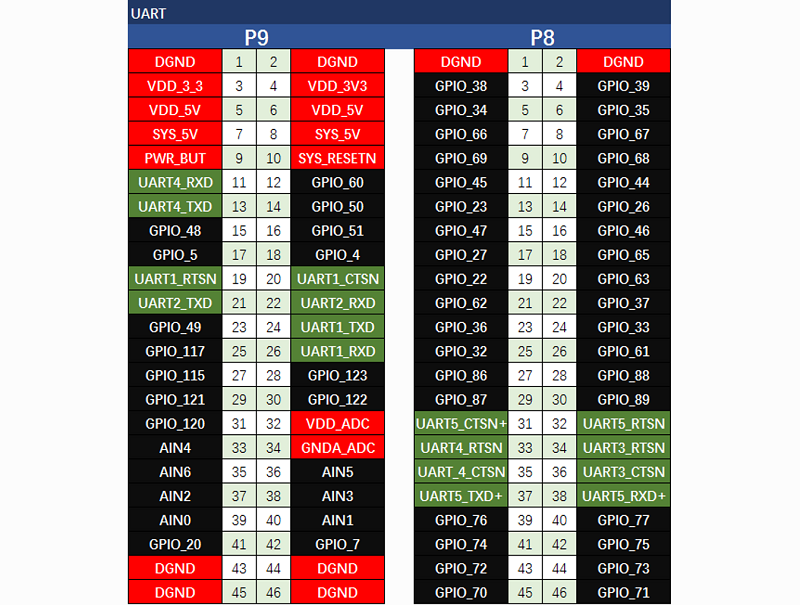
UART
UART0ピンにアクセスしてデバッグケーブルを接続するための専用ヘッダーがあります。追加の5つのシリアルポートが拡張ヘッダーに接続されていますが、そのうち1つは一方向のみがヘッダーに接続されています。
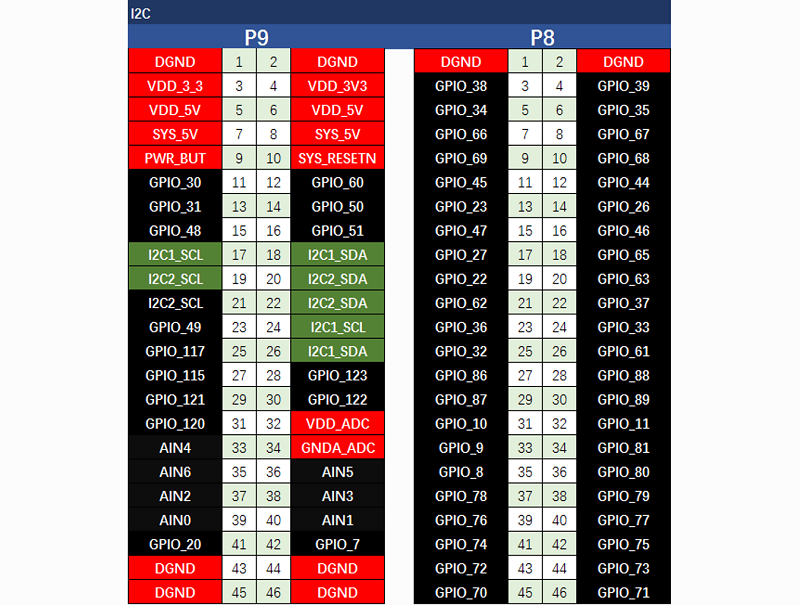
I2C
最初のI2Cバスはケープアドオンボード上のEEPROMを読み取るために使用されており、この機能を妨げることなく他のデジタルI/O操作には使用できませんが、利用可能なアドレスで他のI2Cデバイスを追加することは可能です。2番目のI2Cバスは設定して使用することができます。
SPI
データを高速にシフトアウトする場合、SPIポートの1つを使用することを検討してください。

機械図面


はじめに
この章は Win10 上で執筆されています。他のオペレーティングシステムでも手順はほぼ同じです。
ステップ1. Seeed Studio BeagleBone® Green を USB 経由で接続する
付属の micro USB ケーブルを使用して、Seeed Studio BeagleBone® Green をコンピュータに接続します。この操作により、ボードに電力を供給し、開発インターフェースを提供します。Seeed Studio BeagleBone® Green は、オンボードの 2GB または 4GB eMMC から Linux を起動します。
Seeed Studio BeagleBone® Green はフラッシュドライブとして動作し、ローカルコピーのドキュメントとドライバーを提供します。このインターフェースは microSD カードを新しいイメージで再構成するためには使用できませんが、uEnv.txt ファイルを使用してブートパラメータを更新するために使用できます。
PWR LED が点灯しているのが確認できます。10秒以内に、他の LED がデフォルトの設定で点滅しているのが見えるはずです。
- D2 は起動時にハートビートパターンで点滅するように設定されています
- D3 は起動時に microSD カードアクセス中に点灯するように設定されています
- D4 は起動時に CPU アクティビティ中に点灯するように設定されています
- D5 は起動時に eMMC アクセス中に点灯するように設定されています
ステップ2. ドライバーをインストールする
オペレーティングシステムに対応したドライバーをインストールして、Beagle への USB 経由のネットワークアクセスを可能にします。追加のドライバーをインストールすることで、ボードへのシリアルアクセスも可能になります。
| オペレーティングシステム | USB ドライバー | コメント |
|---|---|---|
| Windows (64-bit) | 64-bit インストーラー | |
| Windows (32-bit) | 32-bit インストーラー | |
| Mac OS X | ネットワーク シリアル | 両方のドライバーをインストールしてください。 |
| Linux | mkudevrule.sh | ドライバーのインストールは不要ですが、いくつかの udev ルールが役立つ場合があります。 |
追加の FTDI USB シリアル/JTAG 情報とドライバーは https://www.ftdichip.com/Drivers/VCP.htm から入手できます。
追加の USB 仮想イーサネット情報とドライバーは https://www.linux-usb.org/gadget/ および https://joshuawise.com/horndis から入手できます。
ステップ3. Beagle にアクセスする
Chrome または Firefox を使用して、ボード上で実行されているウェブサーバーにアクセスします。(Internet Explorer は使用できません。)これにより、ボードの機能を示すプレゼンテーションが読み込まれます。キーボードの矢印キーを使用してプレゼンテーションを操作してください。
http://192.168.7.2 をクリックして Seeed Studio BeagleBone® Green にアクセスしてください。 古いソフトウェアイメージでは、ネットワークを開始するために BeagleBone® ドライブを取り出す必要があります。最新のソフトウェアイメージでは、その手順は不要です。

ステップ4. Cloud9 IDE
ボード上に保存されているプログラムを編集するには、Cloud9 IDE を使用します。以下をクリックしてください。

最新ソフトウェアへの更新
ボードの性能を向上させるために、最新のソフトウェアに更新する必要があります。以下に手順を示します。
ステップ1. 最新のソフトウェアイメージをダウンロード
まず、適切なイメージを以下のリンクからダウンロードしてください。

ファイルサイズが大きいため、このダウンロードには約30分以上かかる場合があります。
ダウンロードしたファイルは .img.xz 拡張子を持っています。これはSDカードのセクターごとの圧縮イメージです。
ステップ2. 圧縮ユーティリティをインストールしてイメージを解凍
7-zip をダウンロードしてインストールしてください。
お使いのシステムに適したバージョンを選択してください。
7-zipを使用してSDカードの .imgファイル を解凍します。
ステップ3. SDカードプログラミングユーティリティをインストール
Image Writer for Windows をダウンロードしてインストールしてください。バイナリ配布版をダウンロードすることを確認してください。
ステップ4. イメージをSDカードに書き込む
まず、microSDカードをコンピュータに接続するためのSDアダプタが必要です。その後、Image Writer for Windowsを使用して解凍したイメージをSDカードに書き込みます。
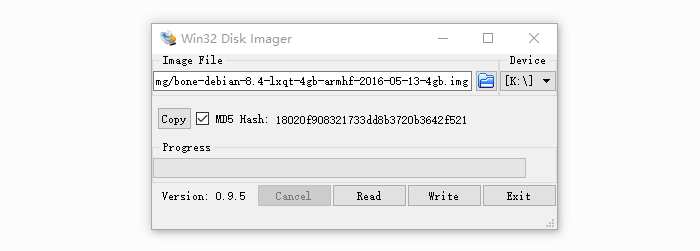
Write ボタンをクリックすると、プロセスが開始されます。
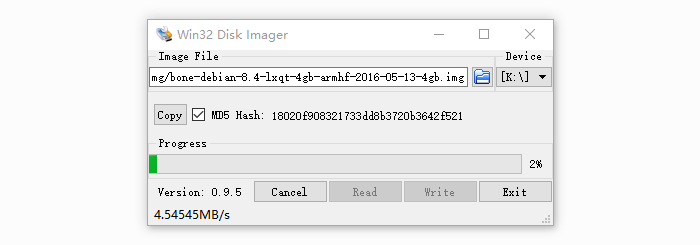
- デバイスが損傷する可能性があるという警告が表示される場合がありますが、SDカードに書き込む場合は問題ありません。
- この時点でBeagleBone®をコンピュータに接続しないでください。
- このプロセスには最大10分かかる場合があります。
ステップ5. SDカードからボードを起動する
SDカードを(まず電源を切った状態で)ボードに挿入します。その後、ボードはSDカードから起動します。
オンボードeMMCにイメージを書き込む必要がない場合、この章の最後を読む必要はありません。それ以外の場合は続行してください。
オンボードeMMCにイメージを書き込みたい場合は、ボードを起動してファイルを変更する必要があります。
/boot/uEnv.txt 内で以下を変更します:
##enable BeagleBone® Black: eMMC Flasher: #cmdline=init=/opt/scripts/tools/eMMC/init-eMMC-flasher-v3.sh 以下に変更:
##enable BeagleBone® Black: eMMC Flasher: cmdline=init=/opt/scripts/tools/eMMC/init-eMMC-flasher-v3.sh
その後、以下のように4つのユーザーLEDが点灯するのが確認できます。
上記のトレースライトが見つからない場合は、RESETボタンを押してボードをリセットしてください。
フラッシングが完了すると、4つのUSRx LEDがすべて消灯します。最新のDebianフラッシャーイメージは完了時にボードの電源を自動的にオフにします。このプロセスには最大10分かかる場合があります。ボードの電源を切り、SDカードを取り外して再度電源を入れることで完了します。
Grove Seeed Studio BeagleBone® Green用
Groveはモジュール化された標準化コネクタプロトタイピングシステムです。Groveは電子機器を組み立てる際にブロック構造のアプローチを採用しています。ジャンパーやはんだ付けベースのシステムと比較して、接続、実験、構築が容易で、学習システムを簡素化しますが、単純化しすぎることはありません。他のプロトタイプシステムの中には、学習レベルをブロック構造にまで下げるものもあります。そうした方法でも良い学びが得られますが、Groveシステムは実際のシステムを構築することを可能にします。接続するにはある程度の学習と専門知識が必要です。
以下に、Seeed Studio BeagleBone® Greenと相性の良いGroveモジュールを一覧にしました。
| SKU | 名前 | インターフェース | リンク |
| 101020054 | Grove - 3-Axis Digital Accelerometer(+16g) | I2C | リンク |
| 101020071 | Grove - 3-Axis Digital Accelerometer(+400g) | I2C | リンク |
| 101020034 | Grove - 3-Axis Digital Compass | I2C | リンク |
| 101020050 | Grove - 3-Axis Digital Gyro | アナログ | リンク |
| 101020081 | Grove - 6-Axis Accelerometer&Compass v2.0 | I2C | リンク |
| 101020072 | Grove - Barometer Sensor(BMP180) | I2C | リンク |
| 104030010 | Grove - Blue LED | I/O | リンク |
| 101020003 | Grove - Button | I/O | リンク |
| 111020000 | Grove - Button(P) | I/O | リンク |
| 107020000 | Grove - Buzzer | I/O | リンク |
| 104030006 | Grove - Chainable RGB LED | I2C | リンク |
| 101020030 | Grove - Digital Light Sensor | I2C | リンク |
| 103020024 | Grove - Finger-clip Heart Rate Sensor | I2C | リンク |
| 101020082 | Grove - Finger-clip Heart Rate Sensor with shell | I2C | リンク |
| 113020003 | Grove - GPS | UART | リンク |
| 104030007 | Grove - Green LED | I/O | リンク |
| 103020013 | Grove - I2C ADC | I2C | リンク |
| 103020006 | Grove - I2C Hub | I2C | リンク |
| 101020079 | Grove - IMU 10DOF | I2C | リンク |
| 101020080 | Grove - IMU 9DOF v2.0 | I2C | リンク |
| 101020040 | Grove - IR Distance Interrupter | I/O | リンク |
| 104030011 | Grove - OLED Display 0.96'' | I2C | リンク |
| 104030008 | Grove - OLED Display 1.12'' | I2C | リンク |
| 104030005 | Grove - Red LED | I/O | リンク |
| 103020005 | Grove - Relay | I/O | リンク |
| 316010005 | Grove - Servo | I/O | リンク |
| 101020023 | Grove - Sound Sensor | アナログ | リンク |
| 101020004 | Grove - Switch(P) | I/O | リンク |
| 101020015 | Grove - Temperature Sensor | アナログ | リンク |
| 101020019 | Grove - Temperature&Humidity Sensor Pro | アナログ | リンク |
Seeed Studio BeagleBone® Green 用のケープ
プロジェクトを開始する際には、拡張ボードが必要になることがあります。Seeed Studio BeagleBone® Green 用のケープはすでに多数存在しており、LCDディスプレイ、モータードライバー、HDMI拡張などが含まれています。以下におすすめのケープをいくつか紹介します。
| Grove Cape | Motor Bridge Cape | HDMI Cape |
|---|---|---|
 |  |  |
| 今すぐ購入! | 今すぐ購入! | 今すぐ購入! |
| Grove Cape | 5インチLCD | 7インチLCD |
|---|---|---|
 |  |  |
| 今すぐ購入! | 今すぐ購入! | 今すぐ購入! |
FAQ
1. Seeed Studio BeagleBone® Green 1 と Seeed Studio BeagleBone® Green 2 の違いは何ですか?
2016年にSeeed Studio BeagleBone® GreenのeMMCを更新しました。そのため、Seeed Studio BeagleBone® Green 1用の以前のファームウェアはSeeed Studio BeagleBone® Green 2では動作しませんが、新しいファームウェアはSeeed Studio BeagleBone® Green 1とSeeed Studio BeagleBone® Green 2の両方で動作します。

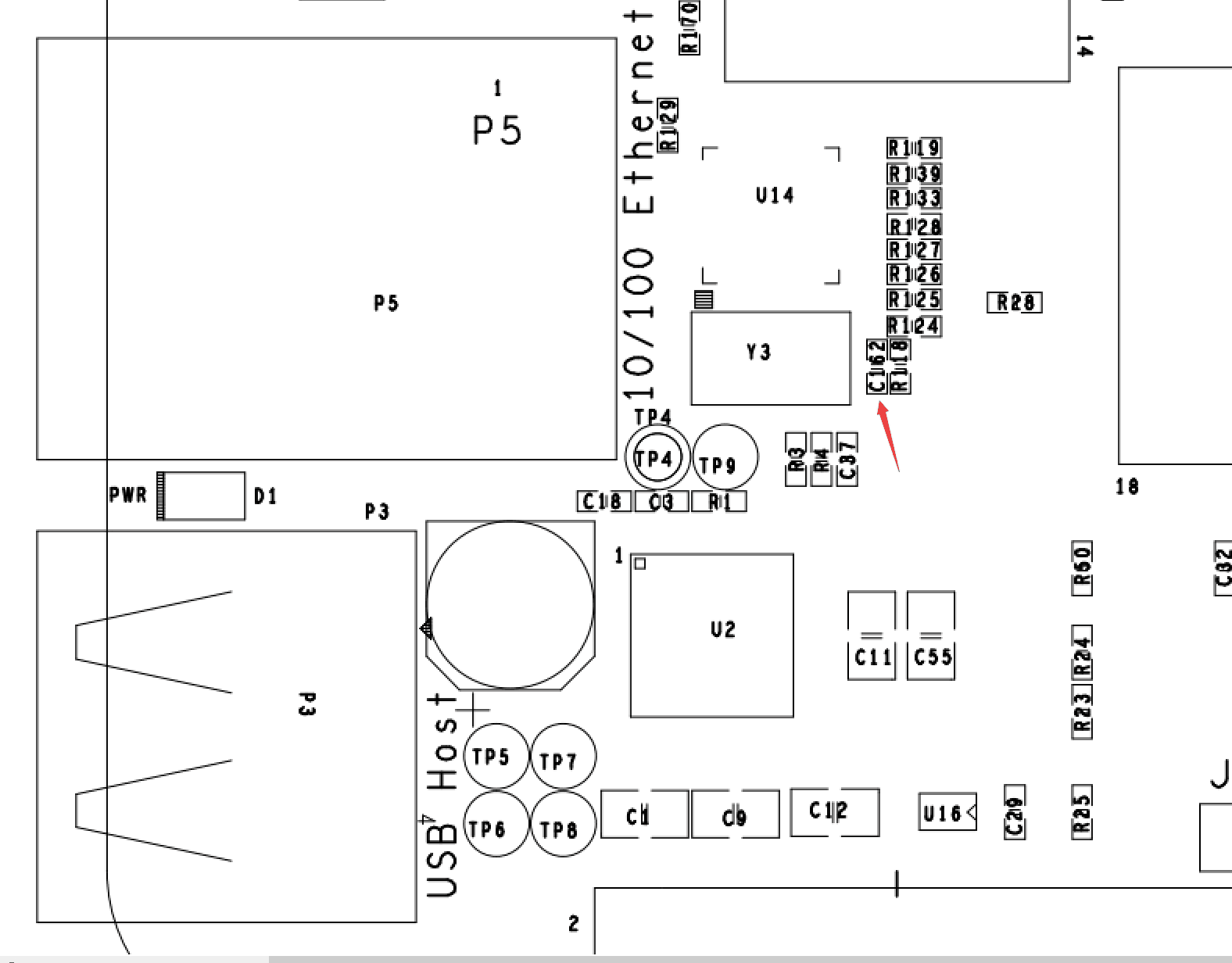
2. Seeed Studio BeagleBone® Greenのネットワークポートが時々動作せず、再起動が必要になることがあります。この問題は時折発生します。
安定した電源に交換して再試行してください。通常、携帯電話のUSB電源アダプターはコンピューターのUSBよりも安定しています。または、コンデンサC162を取り外すこともできます。
3. Seeed Studio BeagleBone® Greenの動作温度範囲は何ですか?
BeagleBone® Greenは0〜75度の温度範囲で動作します。
参考資料
ボードに関する情報をさらに得るための参考資料が多数あります。
- BeagleBoard メインページ
- BeagleBoardページでのSeeed Studio BeagleBone® Green情報
- BeagleBoard 初めての使用ガイド
- トラブルシューティング
- ハードウェアドキュメント
- BeagleBoardのプロジェクト
- Seeed Studio BeagleBone® GreenのCE認証
- Seeed Studio BeagleBone® GreenのFCC認証
回路図オンラインビューア
リソース
- [PDF] Seeed Studio BeagleBone® Green SRM(v1a)
- [PDF] Seeed Studio BeagleBone® Green SRM(v3)
- [PDF] Seeed Studio BeagleBone® Green 回路図 v1.1
- [ZIP] Seeed Studio BeagleBone® Green 回路図 v1.1
- [PDF] Seeed Studio BeagleBone® Green 回路図 v1
- [Zip] Seeed Studio BeagleBone® Green 回路図(OrCAD) v1c
- [RAR] Seeed Studio BeagleBone® Green 回路図(OrCAD)
- [RAR] Seeed Studio BeagleBone® Green PCB(OrCAD)
- [Zip] AM335X データシート
- [3D] Seeed Studio BeagleBone® Green 3Dモデル
- [PDF] Seeed Studio BeagleBone® Green 機械図面
技術サポートと製品ディスカッション
弊社製品をお選びいただきありがとうございます!製品の使用体験がスムーズになるよう、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャネルをご用意しています。