BeagleBone® Green Wireless
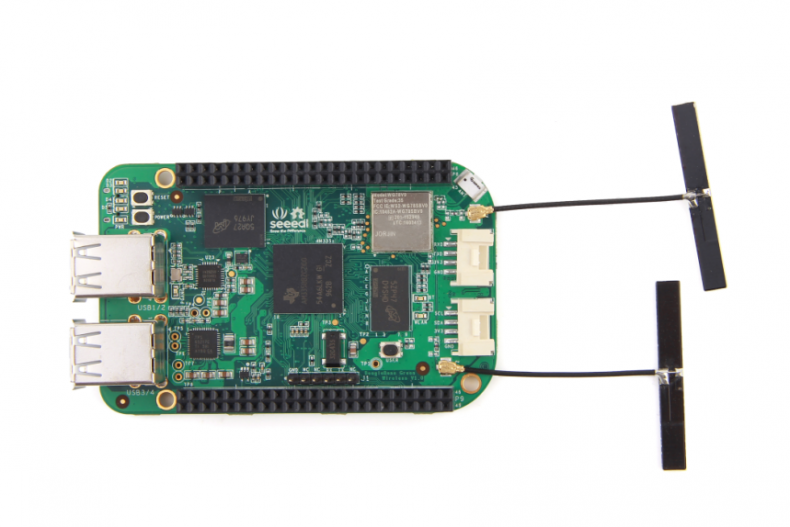
Seeed Studio BeagleBone® Green Wirelessは、BeagleBoard.orgとSeeed Studioの共同開発による製品です。これはBeagleBone® Blackのオープンソースハードウェア設計に基づいており、差別化されたバージョンとして開発されました。Seeed Studio BeagleBone® Green Wirelessには、高性能で柔軟なWiFi/Bluetoothインターフェースと2つのGroveコネクタが搭載されており、Groveセンサーの大家族に簡単に接続できます。オンボードのHDMIとEthernetは、これらのワイヤレス機能とGroveコネクタのために取り除かれています。
特徴
-
BeagleBone® Blackと完全互換
-
プロセッサ: AM335x 1GHz ARM® Cortex-A8
- 512MB DDR3 RAM
- 4GB 8ビットeMMCオンボードフラッシュストレージ
- 3Dグラフィックスアクセラレータ
- NEON浮動小数点アクセラレータ
- 2x PRU 32ビットマイクロコントローラ
-
接続性
- 電源供給と通信のためのUSBクライアント
- 4ポートハブ付きUSBホスト
- WiFi 802.11 b/g/n 2.4GHz
- Bluetooth 4.1(BLE対応)
- 2x 46ピンヘッダー
- 2x Groveコネクタ(I2CおよびUART)
-
ソフトウェア互換性
- Debian
- Android
- Ubuntu
- Cloud9 IDE on Node.js(BoneScriptライブラリ付き)
- その他多数
仕様
| 項目 | 値 |
|---|---|
| プロセッサ | AM335x 1GHz ARM Cortex-A8 |
| RAM | 512MB DDR3 |
| オンボードフラッシュストレージ | 4GB eMMC |
| CPUサポート | NEON浮動小数点 & 3Dグラフィックスアクセラレータ |
| Micro USBサポート | 電源供給 & 通信 |
| USB | USB2.0ホスト *4 |
| Groveコネクタ | 2(1つはI2C、もう1つはUART) |
| GPIO | 2 x 46ピンヘッダー |
| Ethernet | Wi-Fi 802.11b/g/n 2.4GHzおよびBluetooth 4.1 LE |
| 動作温度 | 0 ~ 75 |
応用アイデア
- モノのインターネット(IoT)
- スマートハウス
- 産業用途
- 自動化 & プロセス制御
- ヒューマンマシンインターフェース
- センサーハブ
- ロボット
Seeed Studio BeagleBone® Green Wireless スターターチュートリアル #1-#6
以下は、Seeed Studio BeagleBone® Green Wirelessを使用して、いくつかのGroveモジュールで面白いアイデアを実現するためのスターター向けチュートリアルです。これらのチュートリアルはPythonとmraa/upmライブラリに基づいています。
| #1 呼吸するLED | #2 テーブル上の嵐 | #3 大声で話そう |
|---|---|---|
 |  |  |
| 今すぐ作る! | 今すぐ作る! | 今すぐ作る! |
| #4 今日の気温は? | #5 あなたはどこにいる? | #6 私の小さな目覚まし時計 |
|---|---|---|
 |  |  |
| 今すぐ作る! | 今すぐ作る! | 今すぐ作る! |
面白いプロジェクト
| Bluetoothデバイス検出 | ホームコントロールセンター | SAP HCP IoTサービス |
|---|---|---|
 |  |  |
| 今すぐ作る! | 今すぐ作る! | 今すぐ作る! |
ハードウェア概要

ピンマップ
各デジタルI/Oピンには、GPIOを含む8つの異なるモードを選択できます。
最大65のデジタルI/O
GPIOモードでは、各デジタルI/Oは割り込みを生成できます。

PWMとタイマー
最大8つのデジタルI/Oピンをパルス幅変調(PWM)として設定し、モーターを制御したり、擬似的なアナログ電圧レベルを生成したりすることができます。この操作は追加のCPUサイクルを消費しません。

アナログ入力
アナログ入力ピンに1.8Vを超える電圧を入力しないようにしてください。これは8チャンネルを持つ単一の12ビットアナログ-デジタルコンバータで、そのうち7つがヘッダーで利用可能です。

UART
UART0ピンにアクセスしてデバッグケーブルを接続する専用ヘッダーがあります。追加の5つのシリアルポートが拡張ヘッダーに接続されていますが、そのうち1つは単方向のみがヘッダーに接続されています。

I2C
最初のI2Cバスは、ケープアドオンボード上のEEPROMを読み取るために使用されており、その機能を妨げることなく他のデジタルI/O操作には使用できません。ただし、利用可能なアドレスで他のI2Cデバイスを追加することは可能です。2番目のI2Cバスは設定して使用することができます。

SPI
データを高速でシフトアウトする場合は、SPIポートの1つを使用することを検討してください。

機械図面


はじめに
この章はWin10を基に記述されています。他のオペレーティングシステムでも手順は類似しています。
ステップ1. Seeed Studio BeagleBone® Green WirelessをUSB経由で接続
付属のマイクロUSBケーブルを使用して、Seeed Studio BeagleBone® Green Wirelessをコンピュータに接続します。これにより、ボードに電力を供給し、開発インターフェースを提供します。Seeed Studio BeagleBone® Green Wirelessは、オンボードの2GBまたは4GB eMMCからLinuxを起動します。
Seeed Studio BeagleBone® Green Wirelessは、ローカルコピーのドキュメントとドライバを提供するフラッシュドライブとして動作します。このインターフェースは、microSDカードを新しいイメージで再構成するためには使用できませんが、uEnv.txtファイルを使用してブートパラメータを更新するために使用できます。
PWR LEDが点灯しているのが確認できます。10秒以内に、他のLEDがデフォルト設定で点滅するのが見えるはずです。
- D2は起動時にハートビートパターンで点滅するように設定されています
- D3は起動時にmicroSDカードアクセス時に点灯するように設定されています
- D4は起動時にCPUアクティビティ時に点灯するように設定されています
- D5は起動時にeMMCアクセス時に点灯するように設定されています
ステップ2. ドライバのインストール
オペレーティングシステム用のドライバをインストールして、BeagleへのUSB経由のネットワークアクセスを可能にします。追加のドライバをインストールすることで、ボードへのシリアルアクセスも可能になります。
| オペレーティングシステム | USBドライバ | コメント |
|---|---|---|
| Windows (64-bit) | 64-bitインストーラー | |
| Windows (32-bit) | 32-bitインストーラー | |
| Mac OS X | ネットワーク シリアル | 両方のドライバをインストールしてください。 |
| Linux | mkudevrule.sh | ドライバのインストールは不要ですが、いくつかのudevルールが役立つ場合があります。 |
ステップ3. Beagleにアクセス
ChromeまたはFirefox(Internet Explorerは使用不可)を使用して、ボード上で実行されているWebサーバーにアクセスします。ボードの機能を示すプレゼンテーションが表示されます。キーボードの矢印キーを使用してプレゼンテーションを操作します。
http://192.168.7.2をクリックして、Seeed Studio BeagleBone® Green Wirelessにアクセスしてください。 古いソフトウェアイメージでは、ネットワークを開始するためにBeagleBone®ドライブを取り出す必要があります。最新のソフトウェアイメージでは、この手順は不要です。

ステップ4. Cloud9 IDE
ボード上に保存されているプログラムを編集するには、Cloud9 IDEを使用します。

ステップ5. Seeed Studio BeagleBone® Green Wireless を Wi-Fi に接続する
スマートフォンまたはコンピュータを使用して、ローカル Wi-Fi ネットワークをスキャンし、「BeagleBone® XXX」という名前の AP に接続します。

接続が成功すると、自動的にログインページに移動します。Wi-Fi の SSID を選択し、パスワードを入力して OK をクリックします。

これで、Seeed Studio BeagleBone® Green Wireless が Wi-Fi に接続されました。

ステップ6. Seeed Studio BeagleBone® Green Wireless を Bluetooth デバイスに接続する
Cloud9 IDE に接続し、新しいターミナルを開きます。以下のコマンドを使用して Bluetooth 設定を開始します:
bb-wl18xx-bluetooth
bluetoothctl
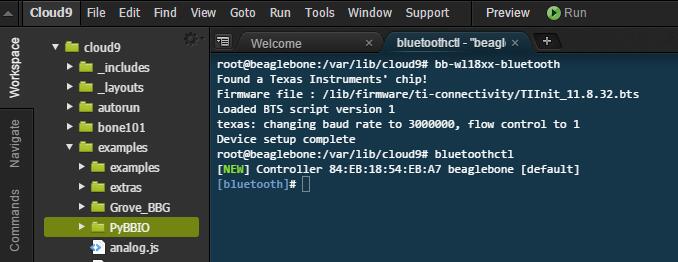
scan on と入力してローカル Bluetooth デバイスをスキャンします。私のデバイス「jy」が見つかりました。

デバイスの MAC アドレスをコピーし、以下のコマンドでデバイスに接続します:
pair 0C:xx:xx:xx:xx:0B
trust 0C:xx:xx:xx:xx:0B
connect 0C:xx:xx:xx:xx:0B

これで、Seeed Studio BeagleBone® Green Wireless が Bluetooth デバイスに接続されました。quit と入力してターミナルに戻ります。
Seeed Studio BeagleBone® Green Wireless で音楽を再生すると、Bluetooth スピーカーで音楽が聞こえるようになります。
最新ソフトウェアへの更新
ボードのパフォーマンスを向上させるために、最新のソフトウェアに更新する必要があります。以下に手順を示します。
ステップ1. 最新のソフトウェアイメージをダウンロードする
まず、適切なイメージを以下のリンクからダウンロードしてください。

ファイルサイズが大きいため、このダウンロードには約 30 分以上かかる場合があります。
ダウンロードしたファイルは .img.xz 拡張子を持っています。これは SD カードのセクターごとの圧縮イメージです。
ステップ2. 圧縮ユーティリティをインストールしてイメージを解凍する
7-zip をダウンロードしてインストールします。
システムに適したバージョンを選択してください。
7-zip を使用して SD カードの .img ファイル を解凍します。
ステップ3. SD カードプログラミングユーティリティをインストールする
Image Writer for Windows をダウンロードしてインストールします。バイナリ配布版をダウンロードしてください。
ステップ4. イメージを SD カードに書き込む
まず、microSD カードをコンピュータに接続するための SD アダプタが必要です。その後、Image Writer for Windows ソフトウェアを使用して解凍したイメージを SD カードに書き込みます。
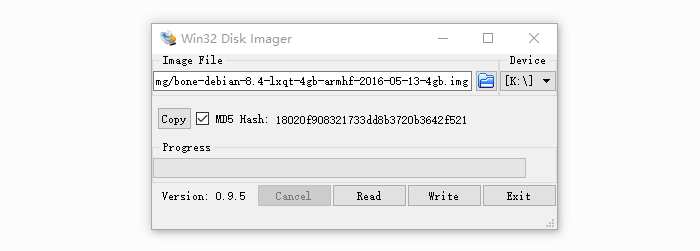
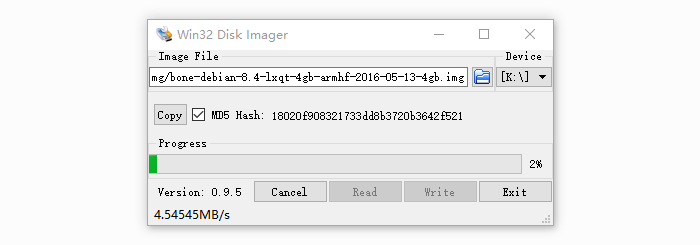
Write ボタンをクリックすると、プロセスが開始されます。
- デバイスが損傷する可能性があるという警告が表示される場合があります。SD カードに書き込む場合は問題ありません。
- この時点で BeagleBone® をコンピュータに接続しないでください。
- このプロセスには最大 10 分かかる場合があります。
ステップ5. SD カードからボードを起動する
SD カードを(電源がオフの状態で)ボードに挿入します。その後、ボードは SD カードから起動します。
オンボード eMMC にイメージを書き込む必要がない場合、この章の最後を読む必要はありません。それ以外の場合は、続行してください。
オンボード eMMC にイメージを書き込みたい場合は、ボードを起動し、ファイルを変更する必要があります。
/boot/uEnv.txt 内で:
汎用 eMMC フラッシャーを有効化する
以下のツールがインストールされていることを確認してください: dosfstools rsync
cmdline=init=/opt/scripts/tools/eMMC/init-eMMC-flasher-v3.sh
次に、以下のように4つのユーザーLEDライトが点灯するのを確認できます:
上記のトレースライトが見つからない場合は、ボードの電源を切り、再度電源を入れてください。
フラッシングが完了すると、すべての USRx LED が消灯します。最新の Debian フラッシャーイメージは、完了時に自動的にボードの電源を切ります。このプロセスには最大で10分かかる場合があります。ボードの電源を切り、SDカードを取り外し、再度電源を入れることで完了します。
Grove モジュールを Mraa と UPM でプログラムする
開発者やセンサーメーカーがセンサーやアクチュエータを対応するハードウェア上に簡単にマッピングできるようにするため、また高レベルの言語や構造を使用して低レベルの通信プロトコルを制御できるようにするために、Mraa ライブラリと UPM ライブラリを提供しています。
Mraa と UPM とは?
Mraa は、Seeed Studio BeagleBone® Green、Seeed Studio BeagleBone® Green Wireless、その他のプラットフォーム上の I/O をインターフェースするための C/C++ ライブラリで、Python、Javascript、Java へのバインディングを備えています。構造化され、合理的な API を提供し、ポート名/番号が使用しているボードに一致します。Mraa を使用することで、特定のハードウェアに縛られることなく、ランタイムでボード検出を行い、サポートされているプラットフォーム間で動作する移植可能なコードを作成できます。
UPM は、Mraa を使用するセンサーのための高レベルリポジトリです。各センサーは Mraa にリンクされており、相互にリンクされることは意図されていませんが、一部のセンサーグループはリンクされる場合があります。各センサーにはインターフェース用のヘッダーが含まれています。通常、センサーはクラスとして表現され、インスタンス化されます。コンストラクタはセンサーを初期化することが期待され、パラメータはボード上の識別/ピン位置を提供するために使用される場合があります。
インストールと更新
Mraa と UPM は、Seeed Studio BeagleBone® Green Wireless のシステムイメージにすでにインストールされているため、インストールする必要はありません。 ただし、ライブラリを更新したい場合やアップグレードしたい場合は、apt-get update と apt-get upgrade を使用してください。詳細については、https://github.com/intel-iot-devkit/mraa および https://github.com/intel-iot-devkit/upm を参照してください。
Mraa の例
- LED を点灯させる
import mraa
import time
#mraa.gpio60 = P9_14 = GPIO_50
led = mraa.Gpio(60)
led.dir(mraa.DIR_OUT)
while True:
led.write(1)
time.sleep(1)
led.write(0)
time.sleep(1)
- Grove - PIR センサー
import mraa
import time
#mraa.gpio73 = P9_27 = GPIO_115
pir = mraa.Gpio(73)
pir.dir(mraa.DIR_IN)
while True:
print (pir.read())
time.sleep(1)
- Grove - 回転角センサー
import mraa
import time
#mraa.aio1 = AIN0
rotary = mraa.Aio(1)
while True:
print(rotary.read())
time.sleep(1)
- その他のチュートリアル
Grove - 3軸デジタル加速度計(±16g) Grove - 可変色LED
Grove - ミニファン Grove - PIR モーションセンサー Grove - 回転角センサー
Grove - OLED ディスプレイ 0.96” Grove - 光センサー Grove - 温度センサー
Grove - GPS Grove - ボタン(P) Grove - ブザー Grove - RTC v2.0
Seeed Studio BeagleBone® Green Wireless 用 Mraa マップ





Seeed Studio BeagleBone® Green用のGrove
Groveは、モジュール化された標準化コネクタのプロトタイピングシステムです。Groveは、電子機器を組み立てる際にブロック構造のアプローチを採用しています。ジャンパーやはんだ付けベースのシステムと比較して、接続、実験、構築が容易で、学習システムを簡素化しますが、単純化しすぎることはありません。他のプロトタイプシステムの中には、レベルをブロック構造まで下げるものもあります。その方法で学べる良い点もありますが、Groveシステムは実際のシステムを構築することを可能にします。接続するにはある程度の学習と専門知識が必要です。
以下に、Seeed Studio BeagleBone® Greenと相性の良いGroveモジュールを一覧にしました。
| SKU | 名前 | インターフェース | リンク |
|---|---|---|---|
| 101020054 | Grove - 3-Axis Digital Accelerometer(+16g) | I2C | リンク |
| 101020071 | Grove - 3-Axis Digital Accelerometer(+400g) | I2C | リンク |
| 101020034 | Grove - 3-Axis Digital Compass | I2C | リンク |
| 101020050 | Grove - 3-Axis Digital Gyro | アナログ | リンク |
| 101020081 | Grove - 6-Axis Accelerometer&Compass v2.0 | I2C | リンク |
| 101020072 | Grove - Barometer Sensor(BMP180) | I2C | リンク |
| 104030010 | Grove - Blue LED | I/O | リンク |
| 101020003 | Grove - Button | I/O | リンク |
| 111020000 | Grove - Button(P) | I/O | リンク |
| 107020000 | Grove - Buzzer | I/O | リンク |
| 104030006 | Grove - Chainable RGB LED | I2C | リンク |
| 101020030 | Grove - Digital Light Sensor | I2C | リンク |
| 103020024 | Grove - Finger-clip Heart Rate Sensor | I2C | リンク |
| 101020082 | Grove - Finger-clip Heart Rate Sensor with shell | I2C | リンク |
| 113020003 | Grove - GPS | UART | リンク |
| 104030007 | Grove - Green LED | I/O | リンク |
| 103020013 | Grove - I2C ADC | I2C | リンク |
| 103020006 | Grove - I2C Hub | I2C | リンク |
| 101020079 | Grove - IMU 10DOF | I2C | リンク |
| 101020080 | Grove - IMU 9DOF v2.0 | I2C | リンク |
| 101020040 | Grove - IR Distance Interrupter | I/O | リンク |
| 104030011 | Grove - OLED Display 0.96'' | I2C | リンク |
| 104030008 | Grove - OLED Display 1.12'' | I2C | リンク |
| 104030005 | Grove - Red LED | I/O | リンク |
| 103020005 | Grove - Relay | I/O | リンク |
| 316010005 | Grove - Servo | I/O | リンク |
| 101020023 | Grove - Sound Sensor | アナログ | リンク |
| 101020004 | Grove - Switch(P) | I/O | リンク |
| 101020015 | Grove - Temperature Sensor | アナログ | リンク |
| 101020019 | Grove - Temperature&Humidity Sensor Pro | アナログ | リンク |
Seeed Studio BeagleBone® Green 用のケープ
プロジェクトを始める際には、拡張ボードが必要になることがあります。Seeed Studio BeagleBone® Green 用にはすでに多くのケープが用意されており、それらには LCD ディスプレイ、モータードライバ、HDMI 拡張などが含まれます。以下におすすめのいくつかを紹介します。
| Grove Cape | モーターブリッジケープ | HDMI ケープ |
|---|---|---|
 |  |  |
| 今すぐ購入! | 今すぐ購入! | 今すぐ購入! |
| Grove Cape | 5インチ LCD | 7インチ LCD |
|---|---|---|
 |  |  |
| 今すぐ購入! | 今すぐ購入! | 今すぐ購入! |
参考資料
ボードに関する情報をさらに得るための参考資料が多数あります。
- BeagleBoard メインページ
- Seeed Studio BeagleBone® Green Wireless の情報 (BeagleBoard ページ)
- BeagleBoard 入門ガイド
- トラブルシューティング
- ハードウェアドキュメント
- BeagleBoard プロジェクト
よくある質問 (FAQs)
Q1: Debian 9.5 2018-10-07 4GB イメージを使用して、Seeed Studio BeagleBone® Green Wireless を Bluetooth デバイスに接続する方法は?
A1: 以下の手順に従ってください。ありがとうございます。
udebian@beaglebone:~$ uname -a
Linux beaglebone 4.14.71-ti-r80 #1 SMP PREEMPT Fri Oct 5 23:50:11 UTC 2018 armv7l GNU/Linux
debian@beaglebone:~$ bluetoothctl --agent
[NEW] Controller A4:D5:78:6D:6F:E0 beaglebone [default]
Agent registered
[bluetooth]# scan on
Discovery started
[CHG] Controller A4:D5:78:6D:6F:E0 Discovering: yes
[NEW] Device C0:72:BC:0A:E6:1E HB7910703602
[NEW] Device E8:19:C4:6B:03:5C YONGNUO LED
[NEW] Device C0:F6:1E:02:0A:1E HB7690138998
リソース
- [PDF] Seeed Studio BeagleBone® Green Wireless 回路図 (pdf)
- [Zip] AM335X データシート
- [3D] Seeed Studio BeagleBone® Green Wireless 3D モデル
- [PDF] Seeed Studio BeagleBone® Green Wireless 機械図面
プロジェクト
Seeed Studio BeagleBone® Green Wireless 灌漑制御: HTML5、WebSockets、Ecmascript 6 を使用した Seeed Studio BeagleBone® Green Wireless 灌漑制御。
技術サポート & 製品ディスカッション
弊社製品をお選びいただきありがとうございます!製品をご利用いただく際にスムーズな体験を提供するため、さまざまなサポートを提供しております。異なる好みやニーズに対応するため、いくつかのコミュニケーションチャネルをご用意しています。