ギアステッピングモータードライバーパック

ギアステッピングモータードライバーパックには、ステッピングモーターとモータードライブボードが含まれています。このモーターは4相8ステップのステッピングモーターであり、ドライブボードを介して簡単に制御することができます。
このパックは位置制御に使用することができます。

特徴
- 低ノイズ
- 大トルク
- 内蔵ギアボックス
仕様
| 項目 | 値 |
|---|---|
| 動作電圧 | 5V |
| 相数 | 4 |
| 減速比 | 1/64 |
| ステップ角度 | 5.625°/64 |
| 直径 | 28mm / Nema 11 |
| アイドル引張周波数 | >500HZ |
| アイドル離脱周波数 | >1000HZ |
| 抵抗 | 21±7% |
| ノイズ | ≤40dB |
| 駆動モード | 4相8ステップ |
主な用途
- デスクトッププリンター
- プロッター
- 3Dプリンター
- CNCフライス盤
ハードウェア概要
ピンアウト


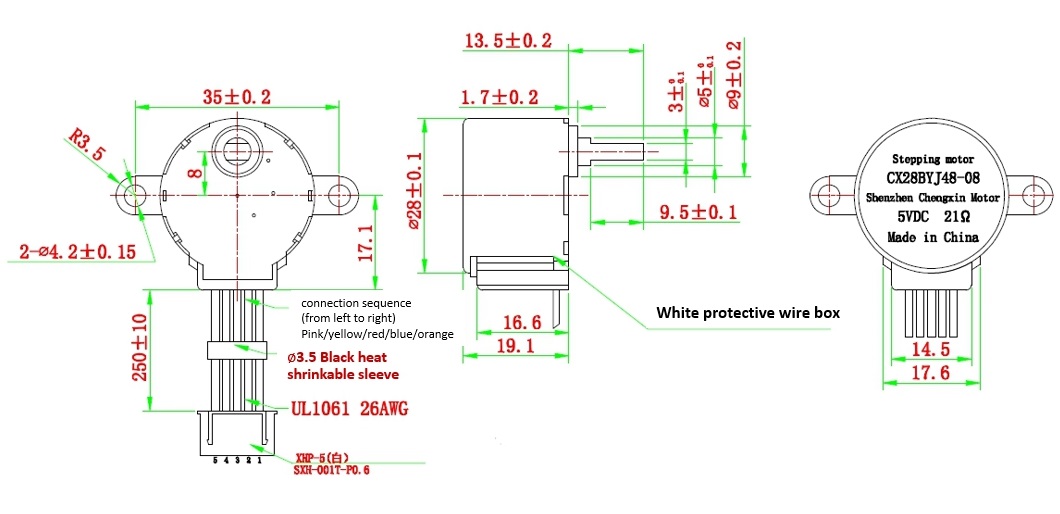
機械図面
クリックすると元の画像を見ることができます。
対応プラットフォーム
| Arduino | Raspberry Pi | |||
|---|---|---|---|---|
上記で対応していると記載されているプラットフォームは、モジュールのソフトウェアまたは理論的な互換性を示しています。ほとんどの場合、Arduinoプラットフォーム向けのソフトウェアライブラリやコード例のみを提供しています。すべての可能なMCUプラットフォーム向けにソフトウェアライブラリやデモコードを提供することはできません。そのため、ユーザー自身でソフトウェアライブラリを作成する必要があります。
はじめに
Arduinoで遊ぶ
ハードウェア
必要な材料
| Seeeduino V4.2 | ギアステッパーモータードライバーパック | メス-オスジャンパー |
|---|---|---|
 |  |  |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
- ステップ 1. ギアステッパーモータードライバーボードをジャンパーを使ってSeeeduinoに接続します。
| Seeeduino | ギアステッパーモータードライバーボード |
|---|---|
| デジタルピン 8 | IN1 |
| デジタルピン 9 | IN2 |
| デジタルピン 10 | IN3 |
| デジタルピン 11 | IN4 |
| GND | GND |
| VCC_5V | VCC |
| VCC_5V | VM |
VMピンをVCC_5Vに接続するか、スイッチでVCCを選択している限り使用しなくても構いません。
-
ステップ 2. ステッパーモーターをギアステッパーモータードライバーボードに接続します。
-
ステップ 3. USBケーブルを使用してSeeeduinoをPCに接続します。

ソフトウェア
Arduinoを初めて使用する場合は、開始する前にArduinoの使い方をご覧になることを強くお勧めします。
- ステップ 1. コードブロックの右上隅にあるアイコン
 をクリックして、以下のコードをArduino IDEの新しいスケッチにコピーします。
をクリックして、以下のコードをArduino IDEの新しいスケッチにコピーします。
int pwm1=9;
int pwm2=10;
int ctr_a =9;
int ctr_b =8;
int ctr_c =11;
int ctr_d =10;
int sd =6;
int i=0;
int t=1500;
void setup()
{
pinMode(ctr_a,OUTPUT);
pinMode(ctr_b,OUTPUT);
pinMode(ctr_c,OUTPUT);
pinMode(ctr_d,OUTPUT);
delay(1);
}
void loop ()
{
for(i=1500;i>=1;i--)
{
digitalWrite(ctr_a,LOW);//A
digitalWrite(ctr_b,HIGH);
digitalWrite(ctr_c,HIGH);
digitalWrite(ctr_d,HIGH);
delayMicroseconds(t);
digitalWrite(ctr_a,LOW);
digitalWrite(ctr_b,LOW);//AB
digitalWrite(ctr_c,HIGH);
digitalWrite(ctr_d,HIGH);
delayMicroseconds(t);
digitalWrite(ctr_a,HIGH);
digitalWrite(ctr_b,LOW);//B
digitalWrite(ctr_c,HIGH);
digitalWrite(ctr_d,HIGH);
delayMicroseconds(t);
digitalWrite(ctr_a,HIGH);
digitalWrite(ctr_b,LOW);
digitalWrite(ctr_c,LOW);//BC
digitalWrite(ctr_d,HIGH);
delayMicroseconds(t);
digitalWrite(ctr_a,HIGH);
digitalWrite(ctr_b,HIGH);
digitalWrite(ctr_c,LOW);//C
digitalWrite(ctr_d,HIGH);
delayMicroseconds(t);
digitalWrite(ctr_a,HIGH);
digitalWrite(ctr_b,HIGH);
digitalWrite(ctr_c,LOW);//CD
digitalWrite(ctr_d,LOW);
delayMicroseconds(t);
digitalWrite(ctr_a,HIGH);
digitalWrite(ctr_b,HIGH);
digitalWrite(ctr_c,HIGH);//D
digitalWrite(ctr_d,LOW);
delayMicroseconds(t);
digitalWrite(ctr_a,LOW);
digitalWrite(ctr_b,HIGH);
digitalWrite(ctr_c,HIGH);//DA
digitalWrite(ctr_d,LOW);
delayMicroseconds(t);
}
}
- ステップ 2. デモをアップロードします。コードのアップロード方法がわからない場合は、コードのアップロード方法を確認してください。
すべてが正常に動作すれば、モーターが動作するのが確認できます。

Raspberry Pi + Python
必要な材料
| Pi Pico | ギアステッパーモータードライバーパック | メス-メスジャンパー |
|---|---|---|
 | | |
| 今すぐ購入 | 今すぐ購入 | 今すぐ購入 |
背景
ステッパーモーターには内部に4つの独立した電磁石があり、これを順番に1つずつ通電することでギアの1つのノッチを回転させます。ギアには64個のノッチがあるため、軸を1回転させるにはこれを64回繰り返す必要があります。
ピンを1つずつ手動で通電することもできますが、RpiMotorLibのようなライブラリを使用することもできます。
方法
-
まだ行っていない場合は、このガイドに従って、Thonny + picozeroを使用してPythonを実行するRaspberry Pi Picoをコンピュータでセットアップしてください。
-
ジャンパーを使用してギアステッパーモータードライバーボードをPi Picoに接続します。
Pi Pico ギアステッパーモータードライバーボード VBUS VCC GND GND GP2 IN1 GP3 IN2 GP4 IN3 GP5 IN4 -
ギアステッピングモータードライバーボードをよく見てみると、「VCC」と「VM」と書かれた小さなスイッチがあることに気づくでしょう。このスイッチは、モーターをドライバーと同じピン(VCC)から電源供給するか、別の電圧源(VM)から供給するかを選択するためのものです。今回はVCCを使用します。スイッチがVCC側にあることを確認してください。
-
Pi PicoをUSB経由でコンピュータに接続する(またはワイヤレスで接続する)し、Thonnyを起動します。
-
以下のコードをThonnyにアップロードして実行します。
from gpiozero import Button, LED
from time import sleep
wait = 0.001 # 秒
ctrA = LED(2) # IN1
ctrB = LED(3) # IN2
ctrC = LED(4) # IN3
ctrD = LED(5) # IN4
while True:
# A
ctrA.on()
ctrB.off()
ctrC.off()
ctrD.off()
sleep(wait)
# AB
ctrA.on()
ctrB.on()
ctrC.off()
ctrD.off()
sleep(wait)
# B
ctrA.off()
ctrB.on()
ctrC.off()
ctrD.off()
sleep(wait)
# BC
ctrA.off()
ctrB.on()
ctrC.on()
ctrD.off()
sleep(wait)
# C
ctrA.off()
ctrB.off()
ctrC.on()
ctrD.off()
sleep(wait)
# CD
ctrA.off()
ctrB.off()
ctrC.on()
ctrD.on()
sleep(wait)
# D
ctrA.off()
ctrB.off()
ctrC.off()
ctrD.on()
sleep(wait)
# DA
ctrA.on()
ctrB.off()
ctrC.off()
ctrD.on()
sleep(wait)
これが何をしているのか? ステッピングモーターには内部に4つの個別の電磁石があります。このコードでは、それらを1つずつ順番に電力供給してループさせることで、ギアを1ノッチ回転させています。これを64回非常に速く繰り返すと、軸が1回転します!
ライブラリを使用する
RpiMotorLibのようなライブラリを使用すると、複雑な部分を省略できます:
-
Thonny -> Tools -> Manage packages ->
RpiMotorLibを検索 -> インストール -
前のセクションの配線手順を同じように実行します
-
以下のコードに置き換えます:
from RpiMotorLib import RpiMotorLib
GpioPins = [2, 3, 4, 5]
mymotortest = RpiMotorLib.BYJMotor("MyMotorName", "28BYJ")
mymotortest.motor_run(GpioPins, 0.001, 512, False, False, "half", 0.05)
上記の「28BYJ」は使用しているステッピングモーターのモデルを指します。他の引数の説明はRpiMotorLibのドキュメントで確認できます。(異なるドライバーボードを使用していますが、ほとんどの内容は同じです)。
リソース
-
[PDF] CX28BYJ48 モーターのデータシート
技術サポートと製品ディスカッション
弊社製品をお選びいただきありがとうございます!製品の使用体験をスムーズにするために、さまざまなサポートを提供しています。異なる好みやニーズに対応するため、複数のコミュニケーションチャネルを用意しています。