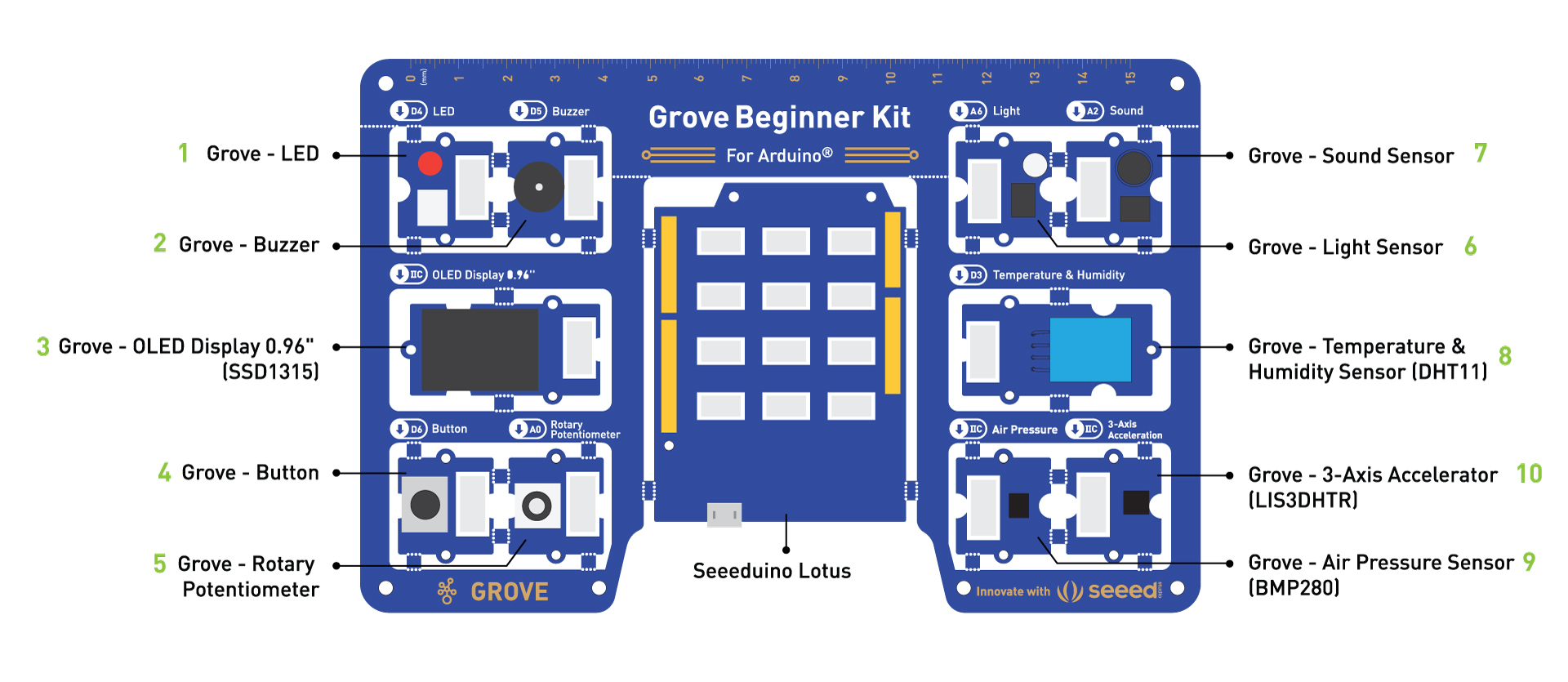
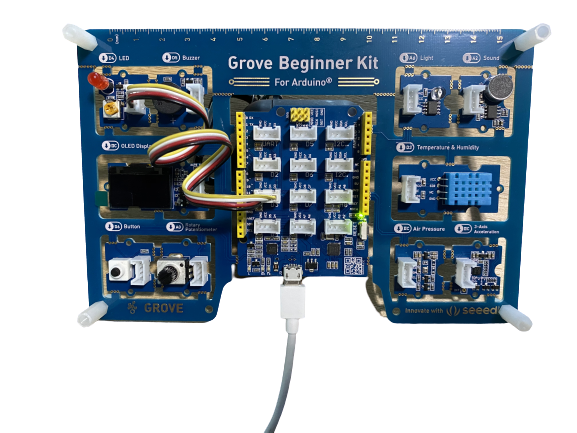
Grove Beginner Kit For Arduino
Grove Beginner Kit for Arduino は、初心者向けの最高の Arduino 初心者キットの一つです。Arduino 互換ボード 1 つと 10 個の追加 Arduino センサーが含まれており、すべて一体型 PCB 設計になっています。すべてのモジュールは PCB スタンプホールを通じて Seeeduino に接続されているため、Grove ケーブルで接続する必要がありません。もちろん、モジュールを取り外して Grove ケーブルでモジュールを接続することもできます。この Grove Beginner Kit For Arduino で、お好みの Arduino プロジェクトを構築できます。
ハードウェア概要
旧バージョン(2025年10月以前)↓
新バージョン(2025年10月以降)↓
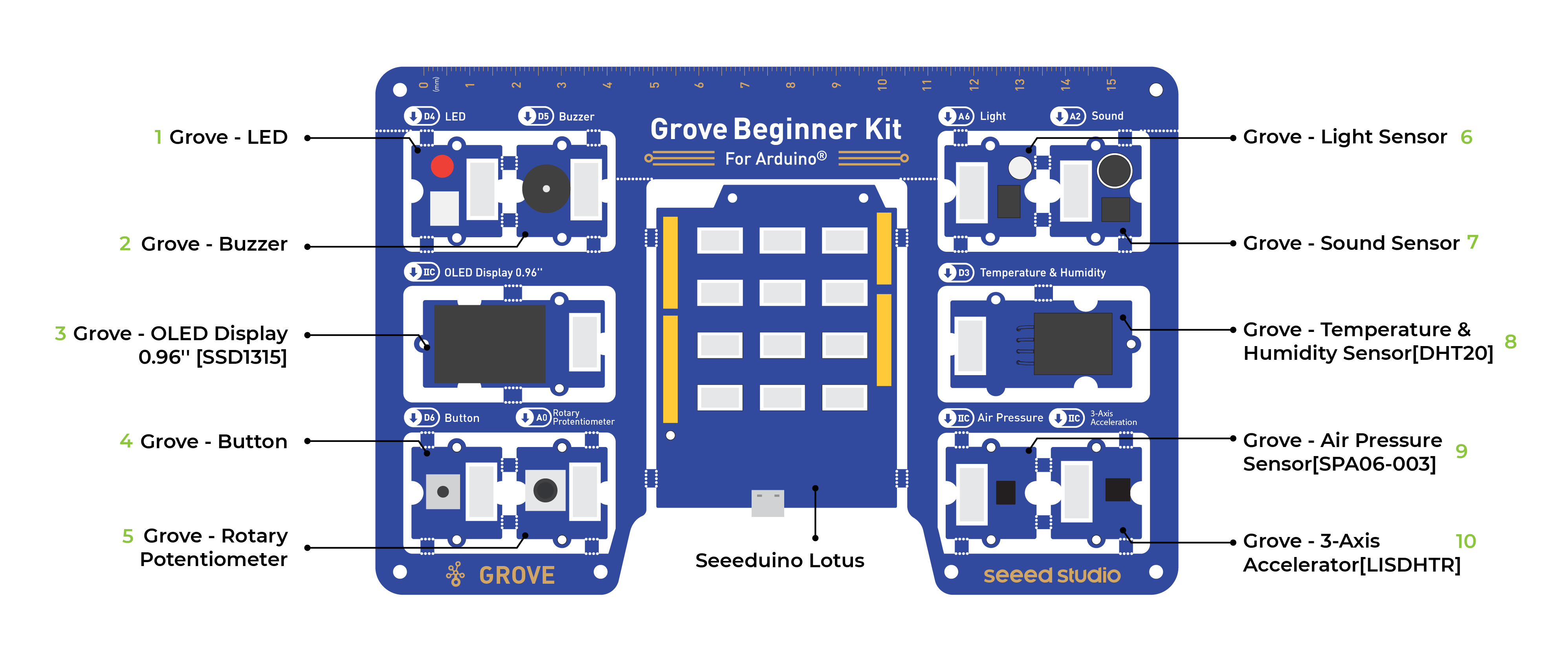
旧バージョンと比較して、この新リリースでは廃止された特定のセンサーが更新されています。DHT11 温湿度センサーは DHT20 温湿度センサーに置き換えられ、BMP280 気圧センサーは SPA06-003 気圧センサーに置き換えられました。
注意: 寸法 - 17.69 11.64 1.88cm
- Grove - LED: シンプルな LED モジュール
- Grove - Buzzer: ピエゾブザー
- Grove - OLED Display 0.96": 128×64 ドット解像度、高輝度、自発光、高コントラスト比、コンパクト設計の大画面、低消費電力。
- Grove - Button: モーメンタリープッシュボタン
- Grove - Rotary Potentiometer: 調整可能なポテンショメーター
- Grove - Light: 周囲の光強度を検出
- Grove - Sound: 周囲の音強度を検出
- Grove - Temperature & Humidity Sensor: 周囲の温度と湿度の値を検出。旧バージョンでは DHT11 センサーを使用し、2025.10 以降のバージョンでは DHT20 センサーを使用。
- Grove - Air Pressure Sensor: 周囲の大気圧を検出
- Grove - 3-Axis Accelerator: オブジェクトの加速度を検出
- Seeeduino Lotus: Grove ポート付き Arduino 互換ボード
注意: デフォルトでは、Grove モジュールは PCB スタンプホールを介して Seeeduino に接続されています。これは、分離されていない場合、Grove ケーブルを使用して接続する必要がないことを意味します。デフォルトのピンは以下の通りです:
| モジュール | インターフェース | ピン/アドレス |
|---|---|---|
| LED | デジタル | D4 |
| Buzzer | デジタル | D5 |
| OLED Display 0.96" | I2C | I2C, 0x78(デフォルト) |
| Button | デジタル | D6 |
| Rotary Potentiometer | アナログ | A0 |
| Light | アナログ | A6 |
| Sound | アナログ | A2 |
| Temperature & Humidity Sensor | デジタル | D3 |
| Air Pressure Sensor | I2C | I2C, 0x77(デフォルト) / 0x76(オプション) |
| 3-Axis Accelerator | I2C | I2C, 0x19(デフォルト) |
分離手順
注意: ナイフを使用する際は、手を切らないよう十分注意してください
モジュールを他の場所で使用したい場合は、以下の手順に従ってモジュールを分離できます!
ステップ 1
ナイフまたは鋭利な物を使用して、センサーを接続するスタンプホールを切断します
ステップ 2
モジュールを上下に振ると、簡単に外れるはずです!
パーツリスト
| モジュール | 数量 |
|---|---|
| センサー | |
| 温湿度センサー | x1 |
| 3軸加速度計 | x1 |
| 気圧センサー | x1 |
| 光センサー | x1 |
| 音センサー | x1 |
| 入力モジュール | |
| ロータリーポテンショメーター | x1 |
| ボタン | x1 |
| 出力モジュール | |
| LED | x1 |
| ブザー | x1 |
| ディスプレイモジュール | |
| OLED ディスプレイ | x1 |
| Grove ケーブル | x6 |
| Micro USB ケーブル(旧バージョン)/ USB ケーブル(2025年10月付け新バージョン) | x1 |
学習目標
- オープンソースハードウェアシステムの基礎。
- 基本的な Arduino プログラミング。
- センサーの通信原理と方法。
- オープンソースハードウェアプロジェクトの実践的実装。
プラグアンドプレイ開封デモ
Grove Beginner Kit にはプラグアンドプレイの開封デモがあり、最初にボードに電源を接続すると、すべてのセンサーを一度に体験できます!ボタンとロータリーポテンショメーターを使用して、各センサーのデモを体験してください!

- スクロール -> ロータリーポテンショメーターを回転
- 選択 -> ボタンを短押し
- 現在のデモを終了 -> ボタンを長押し
ブザーと LED モジュールはキープロンプトに使用されます。
Arduino の始め方
Arduino IDE のインストール
- Arduino IDE は Arduino 用の統合開発環境で、単一チップマイクロコンピューターのソフトウェアプログラミング、ダウンロード、テストなどに使用されます。
- お使いのオペレーティングシステム用の Arduino IDE をここからダウンロードしてインストールしてください。

USB ドライバーのインストール
-
Arduino は USB ケーブルを介して PC に接続されます。USB ドライバーは、Arduino で使用している USB チップの種類によって異なります。注意:USB チップは通常、開発ボードの裏面に印刷されています。
- CP2102 USB Driver をダウンロードしてください。注意: お使いの OS に応じてダウンロードしてください。
- ドライバーのインストールが完了したら、USB ケーブルで Arduino を PC の USB ポートに接続します。
- Windows ユーザーの場合:
マイコンピューター->プロパティ->ハードウェア->デバイス管理で確認できます。COMが表示されます。 - Mac OS ユーザーの場合: 左上の `` に移動し、
この Mac について->システムレポート...->USBを選択します。CP2102 USB Driver が表示されるはずです。
- Windows ユーザーの場合:
- ドライバーがインストールされていない場合、またはドライバーが正しくインストールされていない場合(チップモデルと一致しない)、デバイスマネージャーで「不明なデバイス」として表示されます。この時点で、ドライバーを再インストールする必要があります。
Arduino IDE の起動
1.PC で Arduino IDE を開きます。
2.Tools -> Board-> Arduino AVR Boards-> Arduino Uno をクリックして、正しい開発ボードモデルを選択します。ボードとして Arduino Uno を選択してください。

3.Tools -> Port をクリックして、正しいポート(前のステップでデバイスマネージャーに表示されたシリアルポート)を選択します。この場合、COM11 が選択されています。Mac OS ユーザーの場合、/dev/cu.SLAB_USBtoUART になります。

4.新しい Arduino ファイルを作成して Hello.ino と名前を付け、以下のコードをコピーしてください:
void setup() {
Serial.begin(9600); // initializes the serial port with a baud rate of 9600
}
void loop() {
Serial.println("hello, world"); // prints a string to a serial port
delay(1000); //delay of 1 second
}
5.Arduino IDE の左上には、検証とアップロードの 2 つのボタンがあります。まず、検証ボタン(✓)を押してコンパイルします。コンパイルが成功したら、アップロードボタン(→)を押します。

6.Tools -> Serial Monitor に移動するか、右上の Serial Monitor(虫眼鏡シンボル)をクリックすると、プログラムの実行結果を確認できます:

注意: USB ドライブからポータブル Arduino IDE をインストールした場合、Files -> Sketch Book ですべてのモジュールデモを見つけることができ、すべてのモジュールライブラリも Arduino IDE にプリインストールされています!

注意: すべてのモジュールは単一の回路基板上に事前配線されているため、ケーブルやはんだ付けは必要ありません。ただし、モジュールを分離して Grove ケーブルで接続したい場合は、分離ガイドを確認してください。
レッスンガイド
レッスン 1:LED の点滅
「Hello world」出力プログラムが完了しました。次に、LED モジュールを点灯させる方法を学びましょう。制御システムの 3 つの基本コンポーネントは、入力、制御、出力です。しかし、LED を点灯させるには出力のみを使用し、入力は使用しません。Seeeduino は制御ユニット、LED モジュールは出力ユニットで、出力信号はデジタル信号です。
背景情報:
- デジタル信号とは
デジタル信号: デジタル信号とは、振幅の値が離散的で、振幅が有限の値数に制限される信号を指します。私たちのコントローラーでは、デジタル信号には 2 つの状態があります:0 の場合は LOW(0V)、1 の場合は HIGH(5V)。したがって、LED に HIGH 信号を送信すると点灯できます。

関連コンポーネント
- Seeeduino Lotus
- Grove LED
- Grove ケーブル(分離した場合)

ハードウェア接続
- モジュール接続
- PCB スタンプホールによるデフォルト接続。
- USB ケーブルを通じて Seeeduino をコンピュータに接続します。
-ソフトウェアコード
- Arduino IDE を開きます。
- 以下のコードをコピーし、Verify をクリックして構文エラーをチェックします。エラーがないことを確認したら、コードをアップロードできます。
//LED Blink
//The LED will turn on for one second and then turn off for one second
int ledPin = 4;
void setup() {
pinMode(ledPin, OUTPUT);
}
void loop() {
digitalWrite(ledPin, HIGH);
delay(1000);
digitalWrite(ledPin, LOW);
delay(1000);
}
コード解析
setup(){
}
setup() 関数はスケッチが開始されるときに呼び出されます。変数の初期化、ピンモードの設定、ライブラリの使用開始などに使用します。setup() 関数は Arduino ボードの電源投入またはリセット後に一度だけ実行されます。
loop(){
}
初期化と初期値を設定する setup() 関数を作成した後、loop() 関数はその名前が示すとおりの動作を行い、連続的にループして、プログラムが変化し応答できるようにします。Arduino ボードを積極的に制御するために使用します。
int ledPin = 4;
説明:
値を int データ型に変換します。
構文:
int(x) または (int)x (C スタイル型変換)
パラメータ:
x: 値。許可されるデータ型:任意の型。
ledPin という名前の変数に int 型の 4 を割り当てます。
pinMode(ledPin, OUTPUT);
説明:
指定されたピンを入力または出力として動作するように設定します。ピンの機能の詳細については、Digital Pins ページを参照してください。
Arduino 1.0.1 以降では、INPUT_PULLUP モードで内部プルアップ抵抗を有効にすることができます。さらに、INPUT モードは内部プルアップを明示的に無効にします。
構文:
pinMode(pin, mode)
パラメータ:
pin: モードを設定する Arduino ピン番号。
mode: INPUT、OUTPUT、または INPUT_PULLUP。
ledPin を出力モードに設定します。
digitalWrite(ledPin, HIGH);
説明:
デジタルピンに HIGH または LOW 値を書き込みます。
ピンが pinMode() で OUTPUT として設定されている場合、その電圧は対応する値に設定されます:HIGH の場合は 5V(3.3V ボードでは 3.3V)、LOW の場合は 0V(グランド)。
ピンが INPUT として設定されている場合、digitalWrite() は入力ピンの内部プルアップを有効(HIGH)または無効(LOW)にします。内部プルアップ抵抗を有効にするには、pinMode() を INPUT_PULLUP に設定することをお勧めします。詳細については、Digital Pins チュートリアルを参照してください。
pinMode() を OUTPUT に設定せずに LED をピンに接続し、digitalWrite(HIGH) を呼び出すと、LED が暗く見える場合があります。pinMode() を明示的に設定しないと、digitalWrite() は内部プルアップ抵抗を有効にし、これが大きな電流制限抵抗として機能します。
構文:
digitalWrite(pin, value)
パラメータ:
pin: Arduino ピン番号。
value: HIGH または LOW。
ledPin を出力として設定すると、HIGH はピンに高レベルを送信することを意味し、LED が点灯します。
digitalWrite(ledPin, LOW);
LED を出力として設定すると、LOW はピンに低レベルを送信することを意味し、LED が消灯します。
delay(1000);
説明:
パラメータとして指定された時間(ミリ秒単位)だけプログラムを一時停止します。(1 秒は 1000 ミリ秒です。)
構文:
delay(ms)
パラメータ:
ms: 一時停止するミリ秒数。許可されるデータ型:unsigned long。
プログラムを 1000ms(1 秒)遅延させます。
デモ効果とシリアル印刷結果:
LED モジュールは 1 秒点灯し、1 秒消灯します。
LED 輝度調整:
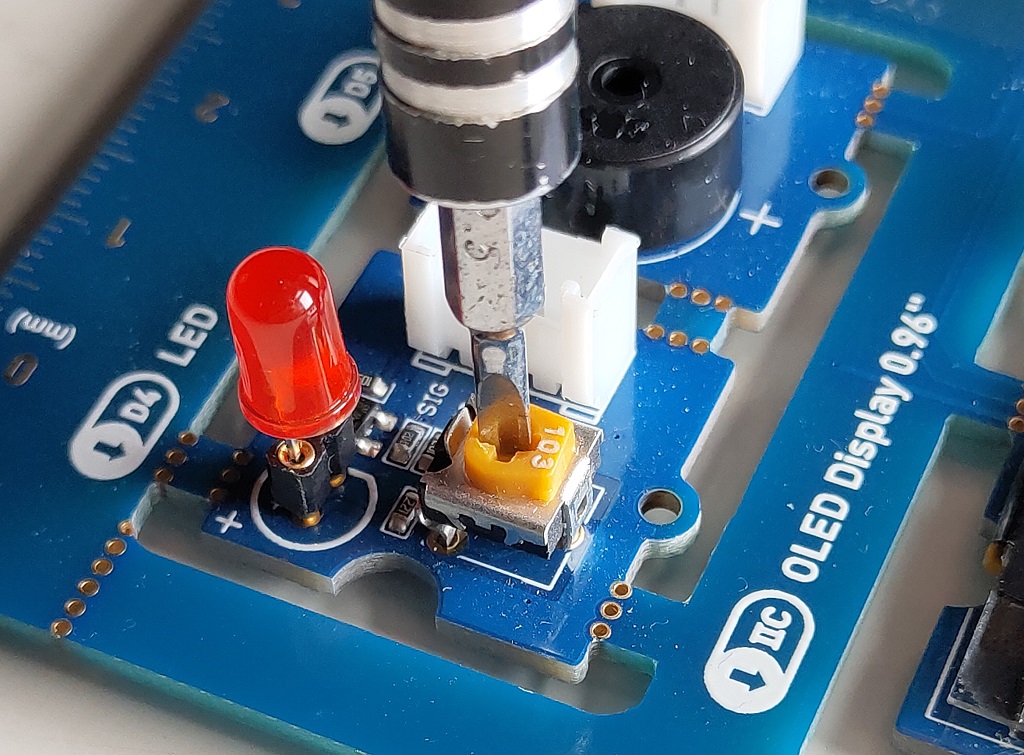
Grove LED モジュールには、ドライバーで調整できる可変抵抗器があります。 それを回して LED をより明るく光らせましょう!
分離ガイド
モジュールがボードから分離されている場合。Grove ケーブルを使用して Grove LED を Seeeduino Lotus のデジタルインターフェース D4 に接続します。
レッスン 2: ボタンを押して LED を点灯させる
最初に知る必要があることは、ボタンの入力はデジタル信号であり、0 または 1 の 2 つの状態しかないため、これらの 2 つの状態に基づいて出力を制御できることです。
- 実習: ボタンを使用して LED モジュールをオン・オフする
使用コンポーネント
- Seeeduino Lotus
- Grove LED
- Grove Button
- Grove ケーブル(分離した場合)

ハードウェア接続
-
モジュール接続:
- PCB スタンプホールによるデフォルト接続。
-
Seeeduino は USB ケーブルを介してコンピュータに接続されます。
-
ハードウェア解析:
- 入力:Button
- 制御:Seeeduino
- 出力:LED モジュール
センサーと LED の両方がデジタル信号を使用するため、デジタルインターフェースに接続する必要があります。
- ソフトウェアコード:
- Arduino IDE を開きます。
- 以下のコードをコピーし、Verify をクリックして構文エラーをチェックします。エラーがないことを確認したら、コードをアップロードできます。
//Button to turn ON/OFF LED
//Constants won't change. They're used here to set pin numbers:
const int buttonPin = 6; // the number of the pushbutton pin
const int ledPin = 4; // the number of the LED pin
// variables will change:
int buttonState = 0; // variable for reading the pushbutton status
void setup() {
// initialize the LED pin as an output:
pinMode(ledPin, OUTPUT);
// initialize the pushbutton pin as an input:
pinMode(buttonPin, INPUT);
}
void loop() {
// read the state of the pushbutton value:
buttonState = digitalRead(buttonPin);
// check if the pushbutton is pressed. If it is, the buttonState is HIGH:
if (buttonState == HIGH) {
// turn LED on:
digitalWrite(ledPin, HIGH);
} else {
// turn LED off:
digitalWrite(ledPin, LOW);
}
}
コード解析
pinMode(ledPin, OUTPUT);
LED を出力ユニットとして定義します。
pinMode(buttonPin, INPUT);
ボタンを入力ユニットとして定義します。
buttonState = digitalRead(buttonPin);
説明:
指定されたデジタルピンから値を読み取り、HIGH または LOW を返します。
構文:
digitalRead(pin)
パラメータ:
pin: 読み取りたい Arduino pin 番号
この関数はデジタルピンの状態を読み取るために使用され、HIGH または LOW を返します。ボタンが押されると状態は HIGH、そうでなければ LOW です。
if (buttonState == HIGH) {
digitalWrite(ledPin, HIGH);
} else {
digitalWrite(ledPin, LOW);
}
}
説明:
if…else は、複数のテストをグループ化できるようにすることで、基本的な if 文よりもコードの流れをより細かく制御できます。else 句(存在する場合)は、if 文の条件が false になった場合に実行されます。else は別の if テストに続くことができるため、複数の相互排他的なテストを同時に実行できます。
各テストは、true テストに遭遇するまで次のテストに進みます。true テストが見つかると、関連するコードブロックが実行され、プログラムは if/else 構造全体に続く行にスキップします。テストが true であることが証明されない場合、デフォルトの else ブロックが存在すれば実行され、デフォルトの動作を設定します。
else if ブロックは、終端の else ブロックありまたはなしで使用でき、その逆も可能です。このような else if 分岐の数に制限はありません。
構文:
if (condition1) {
// do Thing A
}
else if (condition2) {
// do Thing B
}
else {
// do Thing C
}
この文の使用法は:括弧内の論理式が true の場合、if の後の中括弧内の文を実行し、そうでなければ else の後の中括弧内の文を実行します。ボタンの状態が high の場合、LED ピンは高レベルを出力して LED を点灯させ、そうでなければ LED を消灯させます。
デモ効果とシリアル印刷結果:
ボタンを押すと LED モジュールが点灯します。
分離ガイド
Grove ケーブルを使用して Grove LED を Seeeduino Lotus のデジタルインターフェース D4 に接続します。Grove Button をデジタルインターフェース D6 に接続します。
レッスン 3: 点滅の周波数を制御する
前のセクションでは、ボタンには ON/OFF 状態に対応する 0V と 5V の 2 つの状態しかないことを学びましたが、実際には、0V と 5V だけでなく、多くの状態が必要になることがよくあります。その場合はアナログ信号を使用する必要があります!ロータリーポテンショメータは、アナログ信号を使用する典型的な例です。
背景情報:
- アナログ信号とは
アナログ信号: 信号は時間と値において連続的に変化し、信号の振幅、周波数、または位相は任意の時点で連続的に変化します。例えば、現在の放送音声信号や画像信号などです。アナログ信号には正弦波や三角波などがあります。マイクロコントローラのアナログピンは 0V から 5V の間の値を持つことができ、これは 0 から 1023 の範囲にマッピングされ、1023 は 5V に、512 は 2.5V にマッピングされます。

使用コンポーネント
- Seeeduino Lotus
- Grove LED
- Grove Rotary Switch
- Grove ケーブル(分離した場合)

ハードウェア接続
-
モジュール接続:
- PCB スタンプホールによるデフォルト接続。
-
Seeeduino は USB ケーブルを介してコンピュータに接続されます。
-
ハードウェア解析:
- 入力:ロータリーポテンショメータ
- 制御:Seeeduino Lotus
- 出力:LED モジュール
入力はアナログ信号なので、アナログ信号インターフェースに接続し、LED モジュールはデジタル信号インターフェースに接続します。
ソフトウェア
- Arduino IDE を開きます。
- 以下のコードをコピーし、Verifyをクリックして構文エラーをチェックします。エラーがないことを確認してから、コードをアップロードできます。
//Rotary controls LED
int rotaryPin = A0; // select the input pin for the rotary
int ledPin = 4; // select the pin for the LED
int rotaryValue = 0; // variable to store the value coming from the rotary
void setup() {
// declare the ledPin as an OUTPUT:
pinMode(ledPin, OUTPUT);
pinMode(rotaryPin, INPUT);
}
void loop() {
// read the value from the sensor:
rotaryValue = analogRead(rotaryPin);
// turn the ledPin on
digitalWrite(ledPin, HIGH);
// stop the program for <sensorValue> milliseconds:
delay(rotaryValue);
// turn the ledPin off:
digitalWrite(ledPin, LOW);
// stop the program for for <sensorValue> milliseconds:
delay(rotaryValue);
}
コード解析
int rotaryPin = A0; // select the input pin for the rotary
int ledPin = 4; // select the pin for the LED
説明:
rotatePinとledPinを異なる方法で定義していることがわかります。これは、ロータリーポテンショメータがアナログ信号を生成し、LEDがデジタル信号で制御されるためです。
アナログピンを定義するには、A + ピン番号を使用します(例:A0)。
デジタルピンを定義するには、ピン番号のみを使用します(例:4)。
rotaryValue = analogRead(rotaryPin);
説明:
指定されたアナログピンから値を読み取ります。Arduinoボードには、マルチチャンネルの10ビットアナログ・デジタル変換器が含まれています。これは、0と動作電圧(5Vまたは3.3V)の間の入力電圧を0から1023の整数値にマッピングすることを意味します。例えば、Arduino UNOでは、読み取り間の分解能は5ボルト / 1024単位、つまり単位あたり0.0049ボルト(4.9 mV)になります。
構文:
analogRead(pin)
パラメータ:
pin: 読み取るアナログ入力ピンの名前(ほとんどのボードでA0からA5)。
戻り値: ピンでのアナログ読み取り値。アナログ・デジタル変換器の分解能に制限されます(10ビットの場合0-1023、12ビットの場合0-4095)。データ型:int。
この関数は、アナログピン(ロータリーセンサーの位置)の値を読み取るために使用され、値の範囲は0〜1023です。
delay(rotaryValue);
遅延関数。遅延のミリ秒持続時間は括弧内の値です。値はノブピンのアナログ信号の値が読み取られるため、遅延時間はノブで制御できます。
デモ効果とシリアルプリント結果:
ポテンショメータを回すと、LEDの点滅頻度が変わります。
ブレークアウトガイド
Groveケーブルを使用してLEDをSeeeduino LotusのデジタルインターフェースD4に接続し、GroveケーブルでGrove Rotary SwitchをアナログシグナルインターフェースA0に接続します。
レッスン4:ブザーをBEEP音で鳴らす
LEDモジュールと同様に、ブザーも出力モジュールですが、光る代わりにビープ音を発生させます。これは指示目的で多くの状況で使用できます。ブザーを使用して音を生成する方法を学びましょう!
背景情報:
- アクティブブザーとパッシブブザーの違いは何ですか
ブザーには2つのタイプがあり、1つはアクティブ、もう1つはパッシブです。アクティブブザーとパッシブブザーの両方が電子機器で音を出すために使用されます。
アクティブブザーには内部発振源があり、電源が供給されるとブザーが音を出します。アクティブブザーは、コンピュータ、プリンタ、コピー機、アラーム、電子玩具、自動車電子機器、電話、タイマー、その他の電子製品の音響装置で広く使用されています。
パッシブブザーには内部発振源がなく、方形波と異なる周波数で駆動する必要があります。電磁スピーカーのように動作し、変化する入力信号が音を生成します。自動的にトーンを生成するのではありません。
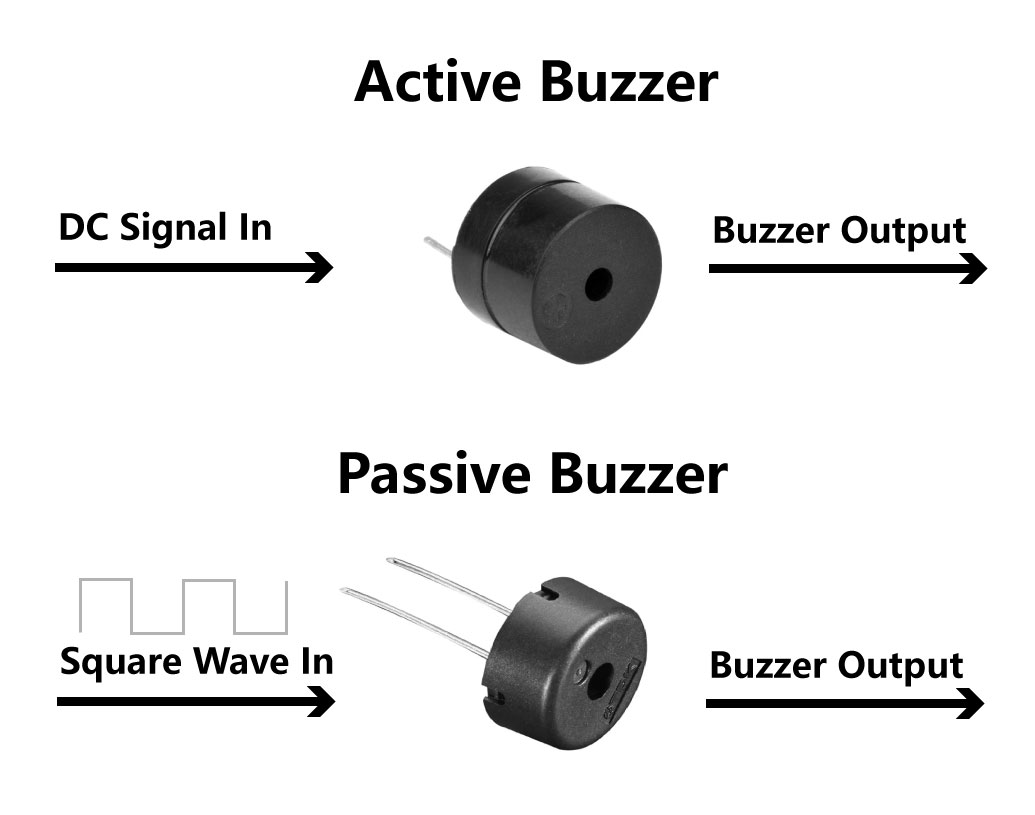
このキットでは、Grove-Buzzerはパッシブブザーなので、制御するためにAC信号が必要です。これは次の質問につながります。ArduinoでSquare Wave(AC信号)を生成する方法は?簡単な方法はPWMを使用することです。
- PWMとは何ですか
**パルス幅変調(PWM)**は、デジタル手段でアナログ結果を得る技術です。デジタル制御を使用して方形波、つまりオンとオフの間で切り替わる信号を作成します。このオンオフパターンは、信号がオンに費やす時間とオフに費やす時間の割合を変更することで、フルオン(5ボルト)とオフ(0ボルト)の間の電圧をシミュレートできます。「オン時間」の持続時間はパルス幅と呼ばれます。さまざまなアナログ値を得るには、そのパルス幅を変更または変調します。このオンオフパターンを十分に速く繰り返すと、結果として信号がAC信号として0から5vの間の安定した電圧であるかのようになります。参考:Arduino。このPWM信号は、パッシブブザーを簡単に制御するために使用できます。
ArduinoでPWM信号を生成するには、DC信号を生成するdigitalWrite()とは対照的に、**analogWrite()**を使用できます。
Seeduinoには「~」記号でマークされた6つのデジタルピンがあり、PWM信号を送信できることを意味します:3、5、6、9、10、11。これらはPWMピンと呼ばれます。
関連コンポーネント
- Seeeduino Lotus
- Grove Buzzer
- Groveケーブル(ブレークアウト時)

ハードウェア接続
- モジュール接続
- PCBスタンプホールによるデフォルト接続。
- USBケーブルでSeeduinoをコンピュータに接続します。
ソフトウェアコード
- Arduino IDEを開きます。
- 以下のコードをコピーし、Verifyをクリックして構文エラーをチェックします。エラーがないことを確認してから、コードをアップロードできます。
int BuzzerPin = 5;
void setup() {
pinMode(BuzzerPin, OUTPUT);
}
void loop() {
analogWrite(BuzzerPin, 128);
delay(1000);
analogWrite(BuzzerPin, 0);
delay(0);
}
コード解析
analogWrite(BuzzerPin, 128);
説明:
ピンにアナログ値(PWM波)を書き込みます。LEDをさまざまな明るさで点灯させたり、モーターをさまざまな速度で駆動したりするために使用できます。analogWrite()の呼び出し後、ピンは同じピンでのanalogWrite()の次の呼び出し(またはdigitalRead()やdigitalWrite()の呼び出し)まで、指定されたデューティサイクルの安定した矩形波を生成します。
構文:
analogWrite(pin, value)
パラメータ:
pin: 書き込むArduinopin。許可されるデータ型:int。
value: デューティサイクル:0(常にオフ)から255(常にオン)の間。許可されるデータ型:int。
ブザーにアナログ値(PWM波)を書き込みます。
デモ効果とシリアルプリント結果:
ブザーがビープ音を鳴らします。
ブレークアウトガイド
GroveケーブルでGrove BuzzerをSeeeduino LotusのデジタルインターフェースD5に接続します。
PWMの使用法
PWMの使用を学んだので、PWMを使用してパッシブブザーを制御することに加えて、PWMを使用してモーターの速度やLEDライトの明るさなどを制御することもできます。
下図が示すように、analogWrite()を使用してPWM波を生成し、デューティサイクルの割合が高いほど、LEDが明るくなります。
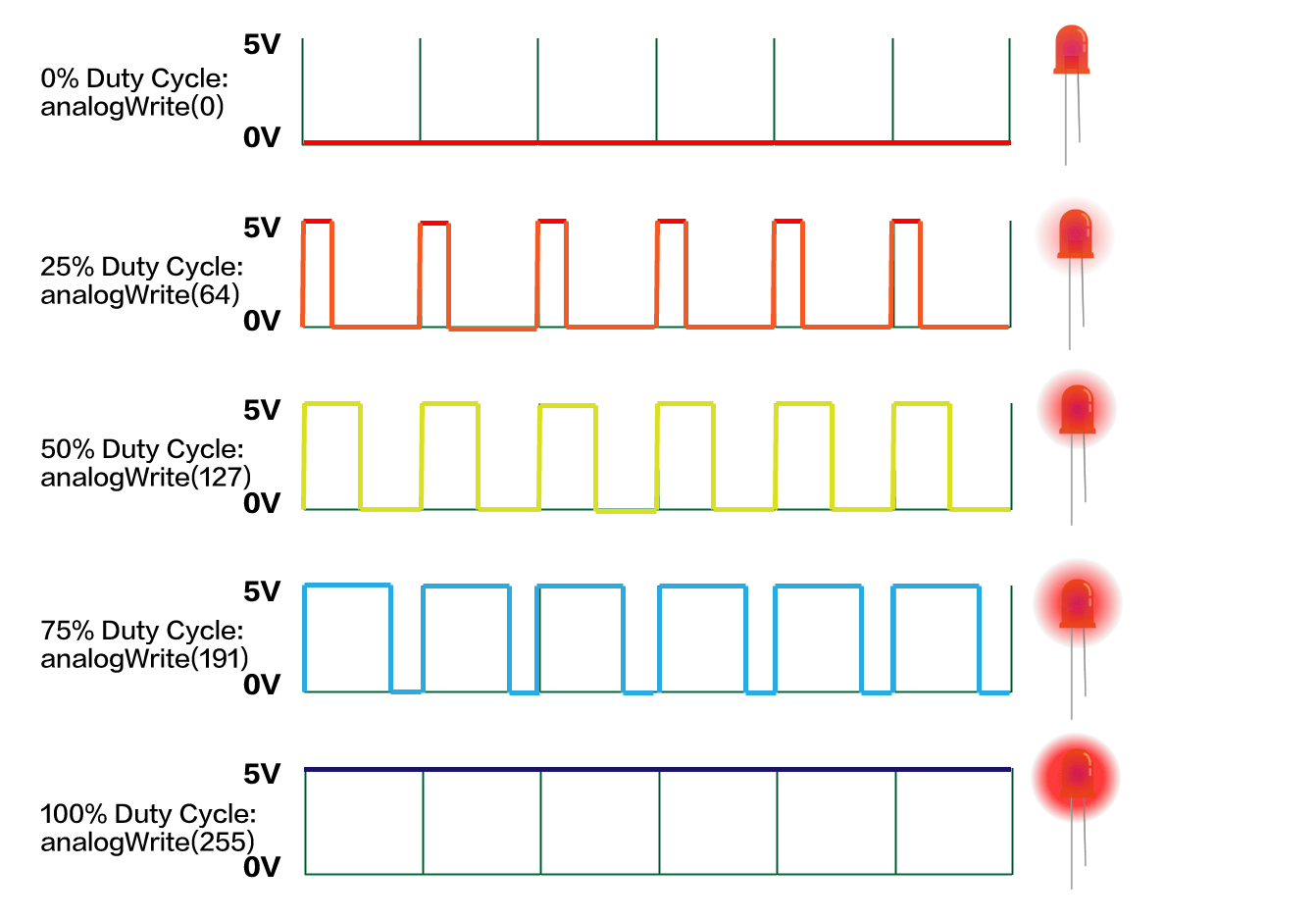
ただし、Grove Beginner KitのLEDモジュールは、PWMで直接制御することはできません。LEDモジュールがD4に接続されており、上記のように、PWMピンは3、5、6、9、10、11であり、ピン4はPWMピンではないためです。LEDをPWMで制御したい場合は、それを取り外してGroveケーブルを使用してPWM機能を持つGroveポートに接続する必要があります。
例えば、Grove-LEDをGroveケーブルでD3に接続してみましょう:
!!!Note D3はGrove-Temperature & Humidity Sensorにも相互接続されているため、この例はGrove-Temperature & Humidity Sensorと一緒に使用することはできません。
int LED = 3; // Cable connection from LED to D3
int Potentiometer = A0;
void setup() {
pinMode(LED, OUTPUT);
pinMode(Potentiometer, INPUT);
}
void loop() {
int potentioValue, Value;
potentioValue = analogRead(Potentiometer);
Value = map(potentioValue, 0, 1023, 0, 255); //Mapping potentiometer value to PWM signal value
analogWrite(LED, Value);
}
コンパイルしてアップロードすると、PWM信号を使用してLEDの明るさを調整できるはずです!
コード解析
Value = map(potentioValue, 0, 1023, 0, 255);
説明:
ある範囲から別の範囲に数値を再マッピングします。つまり、fromLowの値はtoLowにマッピングされ、fromHighの値はtoHighにマッピングされ、その間の値はその間の値にマッピングされます。
範囲外の値が意図的で有用な場合があるため、値を範囲内に制約しません。範囲の制限が必要な場合は、この関数の前後でconstrain()関数を使用できます。
どちらの範囲の「下限」も「上限」より大きくても小さくてもよいため、map()関数は数値の範囲を逆転させるために使用できます。例えば:
y = map(x, 1, 50, 50, 1);
この関数は負の数もうまく処理するため、この例も:
y = map(x, 1, 50, 50, -100);
有効でうまく動作します。
map()関数は整数演算を使用するため、数学的にそうすべきであることを示している場合でも分数を生成しません。小数の余りは切り捨てられ、四捨五入や平均化はされません。
構文:
map(value, fromLow, fromHigh, toLow, toHigh)
パラメータ:
value: マッピングする数値。
fromLow: 値の現在の範囲の下限。
fromHigh: 値の現在の範囲の上限。
toLow: 値のターゲット範囲の下限。
toHigh: 値のターゲット範囲の上限。
ポテンショメータセンサーのアナログ信号(0から1023)を光の明度(0から255)にマッピングします。
デモ効果とシリアル印刷結果:
ポテンショメータを調整してLEDの明度を調整します。
総じて、PWM機能を使用したい場合は、名前の前に「~」記号が付いているピンを選択するようにしてください。
レッスン5:光感知LEDの作成
光センサーには、光の強度を測定するための感光抵抗器が含まれています。感光抵抗器の抵抗は光の強度の増加とともに減少します。周囲が暗い場合はLEDが点灯し、周囲が明るい場合は消灯します。
以下のセクションでは、センサーからの結果を観察するためにシリアルモニターを使用するので、簡単な紹介をします!
背景情報:
- シリアルモニターとは
シリアルモニターはArduinoで結果を観察するための便利なツールで、センサーからの結果を印刷したり、一般的なデバッグに非常に有用です。シリアルモニター経由でコントローラーにデータを送り返して特定のタスクを実行することもできます!注意:シリアルデータ転送がコードと一致していることを確認してください。

Tools -> Serial Monitorをクリックしてシリアルモニターを開くことができます。

関連コンポーネント
- Seeeduino Lotus
- Grove LED
- Grove 光センサー
- Grove ケーブル(分離した場合)

ハードウェア接続
-
モジュール接続:
- PCBスタンプホールによるデフォルト接続。
-
SeeeduinoはUSBケーブルでコンピューターに接続されます。
-
ハードウェア分析:
- 入力:光センサー
- 制御:Seeeduino Lotus
- 出力:LEDモジュール
ソフトウェアコード
- Arduino IDEを開きます。
- 以下のコードをコピーし、Verifyをクリックして構文エラーをチェックします。エラーがないことを確認してから、コードをアップロードできます。
// Light Switch
int sensorpin = A6; // Analog input pin that the sensor is attached to
int ledPin = 4; // LED port
int sensorValue = 0; // value read from the port
int outputValue = 0; // value output to the PWM (analog out)
void setup() {
pinMode(ledPin,OUTPUT);
pinMode(sensorpin, INPUT);
Serial.begin(9600);
}
void loop() {
// read the analog in value:
sensorValue = analogRead(sensorpin);
Serial.println(sensorValue);
if (sensorValue < 200) {
digitalWrite(ledPin, HIGH);
}
else {
digitalWrite(ledPin, LOW);
}
delay(200);
}
シリアルモニターから光強度の読み取り値も確認できます。Tools -> Serial Monitorに移動してください。
コード分析
Serial.begin(9600);
説明:
シリアルデータ転送のデータレートを1秒あたりのビット数(ボー)で設定します。シリアルモニターと通信する場合は、画面右下角のメニューにリストされているボーレートのいずれかを使用してください。ただし、他のレートを指定することもできます。例えば、特定のボーレートを必要とするコンポーネントとピン0と1を介して通信する場合などです。
オプションの第2引数は、データ、パリティ、ストップビットを設定します。デフォルトは8データビット、パリティなし、1ストップビットです。
コンピューター上で動作するソフトウェアは開発ボードと通信し、ボーレートは9600です。
構文:
Serial.begin(speed)
パラメータ:
speed:シリアル通信の速度。例:9600、115200など。
シリアルボーレートを9600に設定します。
Serial.println(sensorValue);
説明:
データを人間が読めるASCIIテキストとしてシリアルポートに印刷し、その後にキャリッジリターン文字(ASCII 13、または'\r')と改行文字(ASCII 10、または'\n')を続けます。このコマンドはSerial.print()と同じ形式を取ります。
構文:
Serial.println(val) または Serial.println(val, format)
パラメータ:
val:印刷する値。許可されるデータ型:任意のデータ型。
format:数値の基数(整数データ型の場合)または小数点以下の桁数(浮動小数点型の場合)を指定します。
シリアルポートが光センサーの値を印刷します。IDEインターフェースでシリアルモニターを開くと、出力センサーの値を確認できます。
デモ効果とシリアル印刷結果:
暗い場合はLEDモジュールが点灯し、明るい場合は消灯します。
分離ガイド
Grove ケーブルを使用してGrove LEDをSeeeduino Lotusのデジタル信号インターフェースD4に接続し、Grove 光センサーをSeeeduino Lotusのアナログ信号インターフェースA6に接続します。
レッスン6:音感知LEDライト
音センサーは環境の音の強度を検出でき、その出力もシミュレートされます。皆さんは音制御ライトに触れたことがあると思いますが、今度は自分で作ることができます。基本を理解していれば、この実験は簡単でしょう。ここでは結果を視覚化するためにシリアルプロッターを使用しました。
背景情報:
- シリアルプロッターとは
シリアルプロッターはシリアルモニターに似ており、Arduinoからコンピューターへのシリアルデータをリアルタイムでネイティブにグラフ化できます。これはデータを視覚化する必要がある場合に非常に有用です。

Tools -> Serial Plotterをクリックしてシリアルプロッターを開くことができます。

- 実習: 音が出るとLEDライトが点灯します。音がなく非常に静かな場合、LEDライトは消灯します。
関連コンポーネント
- Seeeduino Lotus
- Grove LED
- Grove 音センサー
- Grove ケーブル(分離した場合)

ハードウェア接続
- モジュール接続:
- PCBスタンプホールによるデフォルト接続。
- SeeeduinoはUSBケーブルでコンピューターに接続されます。
ソフトウェアコード
- Arduino IDEを開きます。
- 以下のコードをコピーし、Verifyをクリックして構文エラーをチェックします。エラーがないことを確認してから、コードをアップロードできます。
//Sound Control Light
int soundPin = A2; // Analog sound sensor is to be attached to analog
int ledPin = 4; // Digital LED is to be attached to digital
void setup() {
pinMode(ledPin, OUTPUT);
pinMode(soundPin, INPUT);
Serial.begin(9600);
}
void loop(){
int soundState = analogRead(soundPin); // Read sound sensor’s value
Serial.println(soundState);
// if the sound sensor’s value is greater than 400, the light will be on.
//Otherwise, the light will be turned off
if (soundState > 400) {
digitalWrite(ledPin, HIGH);
delay(100);
}else{
digitalWrite(ledPin, LOW);
}
}
シリアルプロッターから光強度の読み取り値も確認できます。Tools -> Serial Plotterに移動してください。
注意:周囲の光強度に応じて値を調整することもできます。
コード分析
Serial.begin(9600);
コンピューター上で動作するソフトウェアは開発ボードと通信し、ボーレートは9600です。
Serial.print(" ");
この関数はシリアルポートからデータを出力するために使用され、出力は二重引用符内に含まれる内容です。
Serial.println( );
この文は上記のものと似ていますが、serial.printlnには改行リターンがあります。
Serial.println(soundState);
シリアルポートが音センサーの値を印刷します。IDEインターフェースでシリアルモニターを開くと、出力センサーの値を確認できます。
デモ効果とシリアル印刷結果:
周囲が十分に騒がしい場合、LEDモジュールが点灯します。
分離ガイド
Grove ケーブルを使用してGrove LEDをSeeeduino Lotusのデジタル信号インターフェースD4に接続し、Grove 音センサーをSeeeduino Lotusのアナログ信号インターフェースA2に接続します。
レッスン7:OLEDでのデータ表示
OLEDディスプレイは多くの状況で使用でき、センサーの読み取り値を視覚化するために使用できます!
背景情報:
- Arduinoライブラリとは
Arduino環境は、他のほとんどのプログラミングプラットフォームと同様に、ライブラリの使用によって拡張できます。ライブラリはスケッチで使用するための追加機能を提供します。例えば、特定のハードウェアでの作業やデータの操作などです。スケッチでライブラリを使用するには、Sketch -> Include Libraryから選択します。

詳細については、Arduinoライブラリのインストール方法もご覧ください。
関連コンポーネント
- Seeeduino Lotus
- Grove OLED
- Grove ケーブル(分離した場合)

ハードウェア接続
- モジュール接続:
- PCBスタンプホールによるデフォルト接続。
- SeeeduinoはUSBケーブルでコンピューターに接続されます。
ソフトウェアコード
- Arduino IDEを開きます。
- U8g2ライブラリをインストールします:Sketch -> Include Library -> Manage Libraries...に移動し、ライブラリマネージャーで「U8g2」というキーワードを検索します。oliverによるu8g2ライブラリをクリックしてインストールします。

- 以下のコードをコピーし、Verifyをクリックして構文エラーをチェックします。エラーがないことを確認してから、コードをアップロードできます。
#include <Arduino.h>
#include <U8x8lib.h>
U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* reset=*/ U8X8_PIN_NONE);
// U8X8_SSD1306_128X64_NONAME_SW_I2C u8x8(/* clock=*/ SCL, /* data=*/ SDA, /* reset=*/ U8X8_PIN_NONE); // OLEDs without Reset of the Display
void setup(void) {
//u8x8.setBusClock(100000); // If you breakout other modules, please enable this line
u8x8.begin();
u8x8.setFlipMode(1);
}
void loop(void) {
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 0);
u8x8.print("Hello World!");
}
!!!注意 すべてのモジュールを分離して Grove OLED を単独で使用する場合、このコードでは動作しない可能性があります。このような問題が発生した場合は、このセクションの最後にある分離ガイドを参照してください。
- コード解析
#include <>
説明:
#include は、スケッチに外部ライブラリを含めるために使用されます。これにより、プログラマーは標準 C ライブラリ(事前に作成された関数のグループ)の大きなグループや、Arduino 専用に書かれたライブラリにアクセスできます。
#include は #define と同様にセミコロン終端子がないことに注意してください。セミコロンを追加すると、コンパイラは暗号的なエラーメッセージを出力します。
#include <U8x8lib.h>
#include はヘッダーファイルを導入する命令です。ここでは U8x8lib.h ライブラリを使用します。
U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* reset=*/ U8X8_PIN_NONE);
注意
他のモジュールを分離して OLED のみを使用する場合は、ソフトウェア I2C を使用する必要があります:
// U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* reset=*/ U8X8_PIN_NONE);
U8X8_SSD1306_128X64_NONAME_SW_I2C u8x8(/* clock=*/ SCL, /* data=*/ SDA, /* reset=*/ U8X8_PIN_NONE);
説明:
オブジェクトが宣言されると、ライブラリの関数を使用できます。
u8x8.begin();
説明:
Arduino 環境でのディスプレイの簡略化されたセットアップ手順。適切な U8g2 コンストラクタの選択については、セットアップガイドを参照してください。
構文:
u8x8.begin()
u8g2 ライブラリを初期化します
u8x8.setFlipMode(1);
説明:
一部のディスプレイは、内部フレームバッファの 180 度回転をサポートしています。このハードウェア機能は、この手順で制御できます。重要:フリップモードを変更した後は、ディスプレイ全体を再描画してください。最良の方法は、まずディスプレイをクリアし、次にフリップモードを変更し、最後にコンテンツを再描画することです。画面上の既存のコンテンツについては、結果は未定義になります。
構文:
u8x8.setFlipMode(mode)
パラメータ:
mode: 0 または 1
ディスプレイを 180 度反転させます。
u8x8.setCursor();
説明:
print 関数のカーソルを定義します。print 関数の出力はすべてこの位置から開始されます。
構文:
u8x8.setCursor(x, y)
パラメータ:
x, y: print 関数のカーソルの列/行位置。
描画カーソル位置を設定します。
u8x8.setFont()
説明:
グリフと文字列描画関数用の u8x8 フォントを定義します。
構文:
u8x8.setFont(font_8x8)
ディスプレイのフォントを設定します。
u8x8.print();
OLED にコンテンツを描画します。
デモ効果とシリアル印刷結果:
OLED ディスプレイに Hello World を印刷します。
U8g2 ライブラリリファレンス
U8g2 ライブラリの詳細については、こちらを参照してください。
分離ガイド
Grove ケーブルを使用して OLED を Seeeduino Lotus の I2C インターフェースに接続します(注意:I2C のデフォルトアドレスは 0x78 です)。
!!!注意
- 他のモジュールを分離して OLED を使用し、動作しない場合、または最速の OLED I2C(デフォルト:40KHZ)を使用したい場合は、この手順に従ってください:
"This PC" -> Documents -> Arduino -> libraries -> U8g2 -> src -> U8x8lib.cpp をクリック -> 1334 行にスライド -> この行を削除または無効化 -> ファイルを保存。
Wire.setClock(u8x8->bus_clock); // just delete or disable this line
または、バスロックを 100000 に設定してから setup() に追加することもできます。
void setup(void) {
u8x8.setBusClock(100000); // it for limit the I2C bus clock
u8x8.begin();
u8x8.setFlipMode(1);
}
レッスン 8:周囲の温度と湿度の検出
周囲の温度と湿度について疑問に思ったことはありませんか?正確な数値を知りたいですか?温度に応じて今日はスカートを着るかコートを着るかを決めたいですか?温度計を作ってみましょう!
背景情報:
- プロトコル信号(I2C)とは
プロトコル信号: 使用するプロトコル信号は I2C なので、ここで I2C について簡単に紹介します。I2C バスは、デバイス間の情報伝送接続において 2 本のワイヤーのみを必要とします:SDA(シリアルデータライン)と SCL(シリアルクロックライン)。
これらの 2 本のラインは双方向 I/O ラインで、バス転送データを開始し、伝送デバイスを開くクロックを生成するために使用される主要コンポーネントです。この時点でアドレス指定されているデバイスはすべてスレーブデバイスと見なされます。
バス上のマスターとスレーブ(送信者と受信者)の関係は一定ではなく、データ伝送の方向に依存します。ホストがスレーブデバイスにデータを送信したい場合、ホストはまずスレーブデバイスをアドレス指定し、次にスレーブデバイスにデータを積極的に送信し、最後にホストがデータ伝送を終了します。ホストがスレーブからデータを受信する場合、スレーブはまずマスターによってアドレス指定されます。
その後、ホストはデバイスから送信されたデータを受信し、ホストが受信プロセスを終了します。この場合、ホストはタイミングクロックの生成とデータ転送の終了を担当します。
- 実習: OLED ディスプレイに現在の周囲温度と湿度を表示させましょう。
使用コンポーネント
- Seeeduino Lotus
- Grove OLED
- Grove 温度・湿度センサー
- Grove ケーブル(分離した場合)

ハードウェア接続
- モジュール接続:
- PCB スタンプホールによるデフォルト接続。
- Seeeduino を USB ケーブルでコンピューターに接続します。
注意
一部のアップグレードされたキットには DHT20 が搭載されています。キット上の湿度・温度検出器が黒色の場合、検出器は DHT20 であり、そのサンプルコードは DHT11 の後にあります。
ソフトウェアコード(DHT11)
- Arduino IDE を開きます。
- 必要なライブラリをダウンロードしてインストールします。
- 以下のコードをコピーし、Verify をクリックして構文エラーをチェックします。エラーがないことを確認したら、コードをアップロードできます。
//Temperature and Humidity Sensor
#include "DHT.h"
#include <Arduino.h>
#include <U8x8lib.h>
#define DHTPIN 3 // what pin we're connected to
#define DHTTYPE DHT11 // DHT 11
DHT dht(DHTPIN, DHTTYPE);
U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* reset=*/ U8X8_PIN_NONE);
void setup(void) {
Serial.begin(9600);
Serial.println("DHTxx test!");
dht.begin();
u8x8.begin();
u8x8.setPowerSave(0);
u8x8.setFlipMode(1);
}
void loop(void) {
float temp, humi;
temp = dht.readTemperature();
humi = dht.readHumidity();
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 33);
u8x8.print("Temp:");
u8x8.print(temp);
u8x8.print("C");
u8x8.setCursor(0,50);
u8x8.print("Humidity:");
u8x8.print(humi);
u8x8.print("%");
u8x8.refreshDisplay();
delay(200);
}
ソフトウェアコード(DHT20)
- Arduino IDE を開きます。
- 必要なライブラリをダウンロードしてインストールします。
- 以下のコードをコピーし、Verify をクリックして構文エラーをチェックします。エラーがないことを確認したら、コードをアップロードできます。
//Temperature and Humidity Sensor
#include "DHT.h"
#include <Arduino.h>
#include <U8x8lib.h>
#include "Wire.h"
#define DHTTYPE DHT20 // DHT 20
DHT dht(DHTTYPE);
#if defined(ARDUINO_ARCH_AVR)
#define debug Serial
#elif defined(ARDUINO_ARCH_SAMD) || defined(ARDUINO_ARCH_SAM)
#define debug SerialUSB
#else
#define debug Serial
#endif
U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/* reset=*/ U8X8_PIN_NONE);
void setup(void) {
debug.begin(115200);
debug.println("DHTxx test!");
Wire.begin();
/*if using WIO link,must pull up the power pin.*/
// pinMode(PIN_GROVE_POWER, OUTPUT);
// digitalWrite(PIN_GROVE_POWER, 1);
dht.begin();
dht.begin();
u8x8.begin();
u8x8.setPowerSave(0);
u8x8.setFlipMode(1);
}
void loop(void) {
float temp, humi;
temp = dht.readTemperature();
humi = dht.readHumidity();
u8x8.setFont(u8x8_font_chroma48medium8_r);
u8x8.setCursor(0, 33);
u8x8.print("Temp:");
u8x8.print(temp);
u8x8.print("C");
u8x8.setCursor(0,50);
u8x8.print("Humidity:");
u8x8.print(humi);
u8x8.print("%");
u8x8.refreshDisplay();
delay(200);
}
右上角の "Monitor" をクリックして結果を確認します。
コード解析
float temp, humi;
読み取り値を格納する変数を定義します。
temp = dht.readTemperature();
humi = dht.readHumidity();
説明:
センサーから温度と湿度の値を読み取るために使用される関数。
構文:
dht.readTemperature() と dht.readHumidity()。戻り値の型:float。
これらの関数を呼び出して温度と湿度を読み取り、定義された変数に格納します。
デモ効果とシリアル印刷結果:
周囲の温度と湿度が OLED 画面に表示されます。
分離ガイド
Grove ケーブルを使用して OLED を Seeeduino Lotus の I2C インターフェースに接続します(注意:I2C のデフォルトアドレスは 0x78 です)。Grove 温度・湿度センサーを Seeeduino Lotus のデジタル信号インターフェース D3 に接続します。
レッスン 9:周囲の気圧測定
Grove 気圧センサーは、大気圧を測定するためのブレークアウトボードです。以前のバージョン(2025年10月以前)では BMP280 センサーを使用していましたが、新しいバージョン(2025年10月以降)では SPA06-003 センサーを使用しています。両方のセンサーは温度と大気圧を正確に測定できます。大気圧は高度によって変化するため、場所のおおよその高度も測定できます。
使用コンポーネント
- Seeeduino Lotus
- Grove 気圧センサー(BMP280 または SPA06-003)
- Grove ケーブル(分離した場合)

ハードウェア接続
- モジュール接続:
- PCB スタンプホールによるデフォルト接続。
- Seeeduino を USB ケーブルでコンピューターに接続します。
ソフトウェアコード
BMP280 用(2025年10月以前の旧バージョン)
- Arduino IDE を開きます。
- Grove Barometer Sensor ライブラリをインストールします:Sketch -> Include Library -> Manage Libraries... に移動し、Library Manager で "Grove BMP280" というキーワードを検索してインストールします。

- 以下のコードをコピーし、Verifyをクリックして構文エラーをチェックします。エラーがないことを確認したら、コードをアップロードできます。
- このプログラムでは、気圧センサーの情報がI2Cバス経由でセンサーからSeeeduinoに送信され、Seeeduinoがそれらをシリアルモニターに出力します。シリアルモニターを開いて結果を確認してください。
//Air pressure detection
#include "Seeed_BMP280.h"
#include <Wire.h>
BMP280 bmp280;
void setup() {
Serial.begin(9600);
if (!bmp280.init()) {
Serial.println("Device not connected or broken!");
}
}
void loop() {
float pressure;
//get and print temperatures
Serial.print("Temp: ");
Serial.print(bmp280.getTemperature());
Serial.println("C"); // The unit for Celsius because original arduino don't support speical symbols
//get and print atmospheric pressure data
Serial.print("Pressure: ");
Serial.print(pressure = bmp280.getPressure());
Serial.println("Pa");
//get and print altitude data
Serial.print("Altitude: ");
Serial.print(bmp280.calcAltitude(pressure));
Serial.println("m");
Serial.println("\n");//add a line between output of different times.
delay(1000);
}
コード解析
#include <Wire.h>
#includeはヘッダーファイルを導入する命令です。ここではWire.hライブラリを使用しており、このライブラリはArduino IDEに含まれています。
#include "Seeed_BMP280.h"
現在のパスのSeeed_BMP280.hヘッダーファイルを導入することを表します。
if (!bmp280.init()) {
Serial.println("Device not connected or broken!");
}
説明:
bmp280.init()を使用して気圧センサーを初期化します。さらに、if条件を使用して正常に開始されたかどうかをチェックし、正常であればメッセージをスキップします。初期化に問題がある場合は、プログラミングにおいて!がNOTを意味するため、メッセージを出力します。
構文:
bmp280.init()
気圧センサーが正常に開始されなかった場合、シリアルモニターにエラーを出力します。
Serial.print(bmp280.getTemperature());
説明:
センサーから温度値を読み取るために使用される関数です。
構文:
bmp280.getTemperature()。戻り値の型:float
温度データをシリアルモニターに出力します。
Serial.print(pressure = bmp280.getPressure());
説明:
センサーから気圧値を読み取るために使用される関数です。
構文:
bmp280.getPressure()。戻り値の型:float
現在の気圧を出力します。
Serial.print(bmp280.calcAltitude(pressure));
説明:
気圧値を取得して高度に変換します。
構文:
bmp280.calcAltitude(float)。戻り値の型:float
パラメータ:
float:気圧値。
高度を出力します。
デモ効果とシリアル出力結果:
気圧の読み取り値がシリアルモニターに表示されます。
ブレークアウトガイド
Groveケーブルを使用してGrove気圧センサーをSeeeduino LotusのGroveケーブルを使用したI2Cインターフェースに接続します(注:I2Cのデフォルトアドレスは0x77または0x76です)。
SPA06-003用(2025年10月以降の新バージョン)
SPA06-003は気圧と温度の両方を測定できる高精度気圧センサーです。Arduinoでの使用方法は以下の通りです:
ライブラリのインストール:
-
Arduino用のSPL07-003ライブラリをダウンロードしてインストールします
-
このライブラリは気圧、温度を読み取り、高度を計算する関数を提供します
説明: このプログラムはSPL07-003気圧・温度センサーとインターフェースして、大気条件を継続的に監視します。特定のサンプリング設定(気圧は32サンプルで4Hz、温度は1サンプルで4Hz)でセンサーを初期化し、気圧、温度、計算された高度値をリアルタイムで読み取り、シリアル通信を介して結果を表示します。
#include <Wire.h>
#include "SPL07-003.h"
// Define SPL07-006 I2C address
#define SPL07_ADDR SPL07_ADDR_DEF // Default I2C address (SDO=high)
// #define SPL07_ADDR SPL07_ADDR_ALT // Alternate I2C address (SDO=low)
// Create SPL07-003 sensor instance
SPL07_003 spl;
//HardwareSerial SerialOut(PA10, PA9); //for STM32F103C8Tx
// Runs at startup
void setup() {
// Begin Serial
Serial.begin(115200);
// Configure & start I2C
//Wire.setSDA(PB7); //for STM32F103C8Tx
//Wire.setSCL(PB6); //for STM32F103C8Tx
Wire.begin();
// Connect to SPL07-003
if (spl.begin(SPL07_ADDR,&Wire) == false) {
Serial.println("Error initializing SPL07-003 :(");
while (1) {}
}//if
Serial.println("Connected to SPL07-003! :)");
// Set pressure & temperature sampling settings
spl.setPressureConfig(SPL07_4HZ, SPL07_32SAMPLES);
spl.setTemperatureConfig(SPL07_4HZ, SPL07_1SAMPLE);
// Set SPL07-003 to continuous measurements
spl.setMode(SPL07_CONT_PRES_TEMP);
}//setup()
// Runs continuously
void loop() {
// Wait for available reading
if (spl.pressureAvailable() || spl.temperatureAvailable()) {
// Read latest values
double pres = spl.readPressure();
double temp = spl.readTemperature();
double altitude = spl.calcAltitude();
// Print to serial
Serial.print("Pres: ");
Serial.print(pres, 3);
Serial.print(" Pa, Temp: ");
Serial.print(temp, 3);
Serial.print(" C, Altitude: ");
Serial.print(altitude, 3);
Serial.println(" m");
}//if
}//loop()
レッスン10:動きの検知
これが最後のセンサーである3軸加速度計で、このモジュールを使用すると、設計に動き監視を簡単に追加できます。そのため、動きを基にして多くの興味深い小実験を行うことができます。
- 実習: 動きが検出されると、ブザーがアラームを鳴らして物体が動いていることを示します。
使用コンポーネント
- Seeeduino Lotus
- Grove 3軸加速度計
- Groveケーブル(ブレークアウト時)

ハードウェア接続
- モジュール接続:
- PCBスタンプホールによるデフォルト接続。
- SeeeduinoをUSBケーブルでコンピューターに接続します。
ソフトウェアコード
- Arduino IDEを開きます。
- Githubから3軸デジタル加速度計(±2g〜16g)をダウンロードします。Sketch > Include library > Add .ZIP libraryをクリックして、ライブラリをIDEにインポートします。
- 以下のコードをコピーし、Verifyをクリックして構文エラーをチェックします。エラーがないことを確認したら、コードをアップロードできます。
- このプログラムでは、加速度情報がI2Cバス経由でセンサーからSeeeduinoに送信され、Seeeduinoがそれらをシリアルモニターに出力します。シリアルモニターを開いて結果を確認してください。
//Gravity Acceleration
#include "LIS3DHTR.h"
#ifdef SOFTWAREWIRE
#include <SoftwareWire.h>
SoftwareWire myWire(3, 2);
LIS3DHTR<SoftwareWire> LIS; //Software I2C
#define WIRE myWire
#else
#include <Wire.h>
LIS3DHTR<TwoWire> LIS; //Hardware I2C
#define WIRE Wire
#endif
void setup() {
Serial.begin(9600);
while (!Serial) {};
LIS.begin(WIRE, 0x19); //IIC init
delay(100);
LIS.setOutputDataRate(LIS3DHTR_DATARATE_50HZ);
}
void loop() {
if (!LIS) {
Serial.println("LIS3DHTR didn't connect.");
while (1);
return;
}
//3 axis
Serial.print("x:"); Serial.print(LIS.getAccelerationX()); Serial.print(" ");
Serial.print("y:"); Serial.print(LIS.getAccelerationY()); Serial.print(" ");
Serial.print("z:"); Serial.println(LIS.getAccelerationZ());
delay(500);
}
コード解析
#include "LIS3DHTR.h"
#ifdef SOFTWAREWIRE
#include <SoftwareWire.h>
SoftwareWire myWire(3, 2);
LIS3DHTR<SoftwareWire> LIS; //Software I2C
#define WIRE myWire
#else
#include <Wire.h>
LIS3DHTR<TwoWire> LIS; //Hardware I2C
#define WIRE Wire
#endif
ソフトウェアI2CまたはハードウェアI2Cを使用してモジュールを初期化します。
while (!Serial) {};
シリアルモニターを開かないとコードがここで停止するため、シリアルモニターを開いてください。
LIS.begin(WIRE, 0x19);
LIS.setOutputDataRate(LIS3DHTR_DATARATE_50HZ);
説明: 加速度計を初期化します。
構文: LIS.begin(Wire, address)。
説明: 加速度計の出力データレートを設定します。
構文: LIS.setOutputDataRate(odr_type_t odr)。
加速度計を初期化し、出力レートを50Hzに設定します。
Serial.print("x:"); Serial.print(LIS.getAccelerationX()); Serial.print(" ");
Serial.print("y:"); Serial.print(LIS.getAccelerationY()); Serial.print(" ");
Serial.print("z:"); Serial.println(LIS.getAccelerationZ());
説明:
センサーからX軸値を読み取るために使用される関数です。
構文:
LIS.getAccelerationX()。戻り値の型:float。
説明:
センサーからY軸値を読み取るために使用される関数です。
構文:
LIS.getAccelerationY()。戻り値の型:float。
説明:
センサーからZ軸値を読み取るために使用される関数です。
構文:
LIS.getAccelerationZ()。戻り値の型:float。
3軸データをシリアルモニターに出力します。
デモ効果とシリアル出力結果:
3軸加速度計の読み取り値がシリアルモニターに表示されます。
ブレークアウトガイド
Groveケーブルを使用してGrove 3軸加速度計をSeeeduino LotusのGroveケーブルを使用したI2Cインターフェースに接続します(注:I2Cのデフォルトアドレスは0x19です)。
ボーナスプロジェクト
プロジェクト1:音楽ダイナミックリズムランプ
- プロジェクト説明: この実験では、ブザーで心地よい音楽を演奏し、音楽の周波数とビートに合わせてLEDライトを点滅させます。
使用コンポーネント
- Seeeduino Lotus
- Grove LED
- ブザー
- Groveケーブル(ブレークアウト時)

ハードウェア接続
- モジュール接続:
- PCBスタンプホールによるデフォルト接続。
- Seeeduino は USB ケーブルでコンピュータに接続されます。
ソフトウェアコード
- Arduino IDE を開きます。
- 以下のコードをコピーし、Verify をクリックして構文エラーをチェックします。エラーがないことを確認してから、コードをアップロードできます。
//Music Dynamic Rhythm Lamp
#define NTD0 -1
#define NTD1 294
#define NTD2 330
#define NTD3 350
#define NTD4 393
#define NTD5 441
#define NTD6 495
#define NTD7 556
#define NTDL1 147
#define NTDL2 165
#define NTDL3 175
#define NTDL4 196
#define NTDL5 221
#define NTDL6 248
#define NTDL7 278
#define NTDH1 589
#define NTDH2 661
#define NTDH3 700
#define NTDH4 786
#define NTDH5 882
#define NTDH6 990
#define NTDH7 112
#define WHOLE 1
#define HALF 0.5
#define QUARTER 0.25
#define EIGHTH 0.25
#define SIXTEENTH 0.625
int tune[]=
{
NTD3,NTD3,NTD4,NTD5,
NTD5,NTD4,NTD3,NTD2,
NTD1,NTD1,NTD2,NTD3,
NTD3,NTD2,NTD2,
NTD3,NTD3,NTD4,NTD5,
NTD5,NTD4,NTD3,NTD2,
NTD1,NTD1,NTD2,NTD3,
NTD2,NTD1,NTD1,
NTD2,NTD2,NTD3,NTD1,
NTD2,NTD3,NTD4,NTD3,NTD1,
NTD2,NTD3,NTD4,NTD3,NTD2,
NTD1,NTD2,NTDL5,NTD0,
NTD3,NTD3,NTD4,NTD5,
NTD5,NTD4,NTD3,NTD4,NTD2,
NTD1,NTD1,NTD2,NTD3,
NTD2,NTD1,NTD1
};
float durt[]=
{
1,1,1,1,
1,1,1,1,
1,1,1,1,
1+0.5,0.5,1+1,
1,1,1,1,
1,1,1,1,
1,1,1,1,
1+0.5,0.5,1+1,
1,1,1,1,
1,0.5,0.5,1,1,
1,0.5,0.5,1,1,
1,1,1,1,
1,1,1,1,
1,1,1,0.5,0.5,
1,1,1,1,
1+0.5,0.5,1+1,
};
int length;
int tonepin=5;
int ledp=4;
void setup()
{
pinMode(tonepin,OUTPUT);
pinMode(ledp,OUTPUT);
length=sizeof(tune)/sizeof(tune[0]);
}
void loop()
{
for(int x=0;x<length;x++)
{
tone(tonepin,tune[x]);
digitalWrite(ledp, HIGH);
delay(400*durt[x]);
digitalWrite(ledp, LOW);
delay(100*durt[x]);
noTone(tonepin);
}
delay(4000);
}
コード解析
#define NTD
これは D キーの周波数の定義で、低音、中音、高音に分かれています。
#define WHOLE 1
#define HALF 0.5
#define QUARTER 0.25
#define EIGHTH 0.25
#define SIXTEENTH 0.625
注意:リズムは 1 拍、半拍、1/4 拍、1/8 拍に分かれており、1 拍音符の時間を 1 と指定します。半拍は 0.5、1/4 拍は 0.25、1/8 拍は 0.125 です。
int tune[]=...
楽譜に従って周波数をリストアップします。
float durt[]=...
楽譜に従って拍をリストアップします。
delay(100*durt[x]);
LED ライトのオン・オフをそれぞれ制御します。
デモ効果とシリアル印刷結果:
ブザーがメロディーを鳴らし、LED モジュールが同じ周波数で点滅します。
ブレークアウトガイド
Grove LED を Seeeduino Lotus のデジタル信号インターフェース D4 に接続し、ブザーを Seeeduino Lotus のデジタル信号インターフェース D5 に接続します。
プロジェクト 2:インテリジェント音光感応デスクランプを作る
- プロジェクト説明: その名の通り、このプロジェクトは音と光で制御される小さなランプを作ることです。出力として LED モジュールを使用する必要があります。光センサーと音センサーを入力信号として使用します。これにより、スマートデスクランプの機能を実現できます:周囲の音レベルが特定の事前設定値を超えた場合、LED が点灯し、または周囲の光強度が特定の値を下回った場合も、LED モジュールが点灯します。
使用コンポーネント
- Seeeduino Lotus
- Grove LED
- 光センサー
- 音センサー
- Grove ケーブル(ブレークアウト時)

ハードウェア接続
- モジュール接続:
- PCB スタンプホールによるデフォルト接続。
- Seeeduino は USB ケーブルでコンピュータに接続されます。
ソフトウェアコード
- Arduino IDE を開きます。
- 以下のコードをコピーし、Verify をクリックして構文エラーをチェックします。エラーがないことを確認してから、コードをアップロードできます。
//light Induction Desk Lamp
int soundPin = A2; // Analog sound sensor is to be attached to analog
int lightPin = A6; //Analog light sensor is to be attached to analog
int ledPin = 4; // Digital LED is to be attached to digital
void setup() {
pinMode(ledPin, OUTPUT);
pinMode(lightPin, INPUT);
pinMode(soundPin, INPUT);
}
void loop(){
int soundState = analogRead(soundPin); // Read sound sensor’s value
int lightState = analogRead(lightPin); // Read light sensor’s value
// if the sound sensor's value is greater than 500 or the sound sensor's is less than 200, the light will be on.
//Otherwise, the light will be turned off
if (soundState > 500 || lightState < 200) {
digitalWrite(ledPin, HIGH);
delay(500); //You can add the "//" to remove the delay
}else{
digitalWrite(ledPin, LOW);
}
}
コード解析
if (soundState > 500 || lightState < 200) {
...
}
括弧内は論理式です。&& と || は論理式でよく使用されます。一般的な使用法は if (式 1 || 式 2) と if (式 1 && 式 2) です。
|| は「または」を表し、そのうちの一つを満たせば、全体の式が真となり、if 判定の条件を満たします。
&& は「かつ」を意味し、括弧内のすべての式が真の場合のみ、if 内の文が実行されます。
デモ効果とシリアル印刷結果:
周囲の音が十分に大きいか、光強度が低い場合、LED モジュールがより強く点灯します。
ブレークアウトガイド
Grove LED を Seeeduino Lotus のデジタル信号インターフェース D4 に接続し、光センサーを Seeeduino Lotus のアナログ信号インターフェース A1 に接続します。音センサーを Grove ケーブルを使用して Seeeduino Lotus のアナログ信号インターフェース A2 に接続します。
独自のモジュールとボードを作る
この期間の学習を通じて、Arduino とオープンソースハードウェアについて体系的な理解を得ましたので、さらに進んで独自のモジュールや開発ボードを作ってみませんか?
EDA
独自のボードを設計するには、独自のモジュールの回路図を設計する必要があり、そのためには EDA ツールが必要です。ここではオープンソースの EDA ソフトウェアを推奨します。
- KiCAD
KiCad は電子設計自動化のための無料ソフトウェアスイートです。電子回路の回路図設計とその PCB 設計への変換を促進します。回路図キャプチャと PCB レイアウト設計のための統合環境を特徴としています。プログラムは回路図キャプチャと Gerber 出力付きの PCB レイアウトを処理します。このスイートは Windows、Linux、macOS で動作し、GNU GPL v3 の下でライセンスされています。
- Upverter
回路図やレイアウトを自分で作業したくないが、Seeed のモジュールに基づくプロトタイプを統合製品に変換したい場合は、Upverter を試すことを強くお勧めします。
詳細については、Grove Beginner Kit for Arduino Upverter ガイド をご覧ください。
PCB サービス
設計が完了したら、Seeed Fusion PCBA サービス をチェックしてください。これは設計を実際に機能するデバイスに変換するのに役立ちます。

Seeed Studio には独自の Open Parts Library (OPL) があり、これは Seeed Fusion PCBA サービス専用に調達された 10,000 以上の一般的に使用されるコンポーネントのコレクションです。PCB 設計プロセスを高速化するため、Seeed は KiCad と Eagle 用のコンポーネントライブラリを構築しています。すべてのコンポーネントが Seeed の PCBA OPL から調達され、Seeed Fusion PCB Assembly (PCBA) サービス と併用される場合、PCBA 全体の生産時間を 20 営業日からわずか 7 日に短縮できます。
FAQ
1. 個別の電子モジュールを使用するために取り外すにはどうすればよいですか?

Grove Beginner Kit For Arduino をよく見ると、各個別モジュールとバックプレーンの間に 3 つの小さな穴があることがわかります。必要なのは、斜めペンチを使用して小さな穴からモジュール周辺の PCB バックプレーンを切断することだけです。

注意:小さな穴の周辺に沿って慎重に切断し、小さな穴まで切らないでください(内部配線のショートサーキットを防ぎ、モジュールの損傷を防ぐため)。誤って小さな穴まで切ってしまった場合は、ナイフを使用して小さな穴をきれいにしてショートサーキットを防いでください

回路図オンラインビューア
リソース
-
回路図設計ファイル
-
Github のモジュールライブラリ:
-
Grove Beginner Kit For Arduino Codecraft グラフィカルプログラミングコース web v8
さらなる学習
技術サポート & 製品ディスカッション
弊社製品をお選びいただき、ありがとうございます!弊社製品での体験が可能な限りスムーズになるよう、さまざまなサポートを提供いたします。異なる好みやニーズに対応するため、複数のコミュニケーションチャンネルをご用意しています。